Результат интеллектуальной деятельности: ДОЗА С КОМПЕНСАЦИЕЙ ПЕРЕМЕЩЕНИЯ, ПОЛУЧЕННАЯ ТКАНЬЮ В ПРОЦЕДУРАХ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ
Вид РИД
Изобретение
Данное раскрытие относится к оценке дозы, полученной целевой областью, в частности к оценке в медицине дозы, полученной тканью, с использованием компенсации движения.
Брахитерапия с высокой мощностью дозы (HDR) предполагает лечение рака посредством временного введения высокорадиоактивных источников внутрь или вблизи целевого участка, такого как предстательная железа. До первого сеанса лечения в целевой участок трансперинеально вводится множество катетеров. Катетеры очерчиваются на трансректальных ультразвуковых (ТРУЗИ) изображениях, при этом информация о положениях катетеров поступает в систему планирования терапии для определения оптимальных положений HDR источников в каждом катетере и времени, которое они провели в этом положении. План HDR-брахитерапии далее реализуется за одну фракцию или за множество фракций в течение нескольких дней. В некоторых случаях может выполняться компьютерно-томографическое (CT) сканирование до и после каждой фракции для подтверждения положения катетеров. Однако, хотя это и позволяет геометрически проконтролировать положение катетеров в процессе лечения, доза, в действительности выданная пациенту, не определяется.
Согласно принципам настоящего изобретения предложена система, включающая в себя устройство, способное воспринимать форму, имеющее, по меньшей мере, одно оптическое волокно. Модуль позиционирования источников выполнен с возможностью приема оптических сигналов, по меньшей мере, от одного оптического волокна в структуре и интерпретации оптических сигналов для предоставления информации о перемещении терапевтических источников в устройстве. Модуль определения дозы выполнен с возможностью создания одной или более временных ячеек, представляющих общее время терапии. Для каждой временной ячейки модуль определения дозы выполнен с возможностью определения дозы, полученной целевой областью, подвергаемой терапии, используя информацию о перемещении терапевтических источников. Модуль определения дозы дополнительно выполнен с возможностью суммирования доз, полученных целевой областью, для каждой из одной или более временных ячеек для определения общей дозы, полученной целевой областью.
Например, модуль определения дозы может быть выполнен с возможностью определения дозы, доставляемой терапевтическими источниками, используя информацию о перемещении терапевтических источников. Модуль определения дозы может быть также выполнен с возможностью определения дозы, доставляемой терапевтическими источниками, используя начальный план терапии. Кроме того, модуль определения дозы может быть дополнительно выполнен с возможностью определения дозы, полученной целевой областью, в качестве дозы, доставляемой терапевтическими источниками. Типовая система также может дополнительно включать в себя модуль визуализации, выполненный с возможностью предоставления информации о перемещении целевой области посредством визуализации целевой области. Модуль определения дозы может быть дополнительно выполнен с возможностью построения функций распределения вероятностей (PDF) для схем перемещений каждого воксела целевой области на основе информации о перемещении целевой области. Модуль определения дозы может быть дополнительно выполнен с возможностью производить свертку PDF для каждого воксела с дозой, доставленной терапевтическими источниками, для определения дозы, полученной целевой областью. Устройство, способное воспринимать форму, может представлять собой катетер. Модуль визуализации может быть выполнен с возможностью проведения ультразвуковой и/или магнитно-резонансной визуализации. Типовая система может дополнительно включать в себя модуль планирования, выполненный с возможностью изменения плана терапии на основе информации о перемещении терапевтических источников и/или информации о перемещении целевой области. Общее время терапии может включать в себя, например, время, приходящееся на одну фракцию, множество фракций и/или фракции за некоторый период времени.
Кроме того, согласно принципам настоящего изобретения предложена рабочая станция, в состав которой входит система восприятия формы, включающая в себя: устройство, способное воспринимать форму, имеющее, по меньшей мере, одно оптическое волокно, и модуль позиционирования источников, выполненный с возможностью приема оптических сигналов, по меньшей мере, от одного оптического волокна в структуре и интерпретации оптических сигналов для предоставления информации о перемещении терапевтических источников в устройстве. Модуль определения дозы выполнен с возможностью создания одной или более временных ячеек, представляющих общее время терапии. Для каждой временной ячейки модуль определения дозы выполнен с возможностью определения дозы, полученной целевой областью, подвергаемой терапии, используя информацию о перемещении терапевтических источников. Модуль определения дозы дополнительно выполнен с возможностью суммирования доз, полученных целевой областью, для каждой из одной или более временных ячеек для определения общей дозы, полученной целевой областью. В состав может также входить устройство отображения.
Например, модуль определения дозы может быть выполнен с возможностью определения дозы, доставляемой терапевтическими источниками, используя информацию о перемещении терапевтических источников. Модуль определения дозы может быть также выполнен с возможностью определения дозы, доставляемой терапевтическими источниками, используя начальный план терапии. Кроме того, модуль определения дозы может быть дополнительно выполнен с возможностью определения дозы, полученной целевой областью, в качестве дозы, доставляемой терапевтическими источниками. Типовая рабочая станция может дополнительно включать в себя модуль визуализации, выполненный с возможностью предоставления информации о перемещении целевой области путем визуализации целевой области. Модуль определения дозы может быть дополнительно выполнен с возможностью построения функций распределения вероятностей (PDF) для схем перемещений каждого воксела целевой области на основе информации о перемещении целевой области. Модуль определения дозы может быть дополнительно выполнен с возможностью производить свертку PDF для каждого воксела с дозой, доставленной терапевтическими источниками, для определения дозы, полученной целевой областью. Устройство, способное воспринимать форму, может представлять собой катетер. Модуль визуализации может быть выполнен с возможностью проведения ультразвуковой и/или магнитно-резонансной визуализации. Типовая рабочая станция может дополнительно включать в себя модуль планирования, выполненный с возможностью изменения плана терапии на основе информации о перемещении терапевтических источников и/или информации о перемещении целевой области. Общее время терапии может включать в себя, например, время, приходящееся на одну фракцию, множество фракций и/или фракции за некоторый период времени.
Кроме того, согласно принципам настоящего изобретения предложен способ, включающий в себя определение информации о перемещении терапевтических источников в устройстве, способном воспринимать форму, расположенном в структуре. Созданы одна или более временных ячеек, представляющих общее время терапии. Для каждой из временных ячеек рассчитывается доза, полученная целевой областью, подвергаемой терапии, используя информацию о перемещении терапевтических источников. Дозы, полученные целевой областью для каждой из временных ячеек, суммируются для определения общей дозы, полученной целевой областью.
Например, типовой способ может дополнительно включать в себя выполняемый для каждой из временных ячеек расчет дозы, доставленной терапевтическими источниками, используя информацию о перемещении терапевтических источников. Типовой способ может также включать в себя выполняемый для каждой из временных ячеек расчет дозы, доставленной терапевтическими источниками, используя начальный план терапии. Расчет дозы, полученной целевой областью, может включать в себя определение дозы, полученной целевой областью, в качестве дозы, доставленной терапевтическими источниками. Типовой способ может дополнительно включать в себя визуализацию целевой области для предоставления информации о перемещении целевой области. Кроме того, типовой способ может дополнительно включать в себя расчет функций распределения вероятностей (PDF) для схем перемещений каждого воксела целевой области на основе информации о перемещении целевой области. Типовой способ может дополнительно включать в себя выполнение свертки для каждого воксела с дозой, доставленной терапевтическими источниками, для определения дозы, полученной целевой областью. Устройство, способное воспринимать форму, может представлять собой катетер. Визуализация целевой области может включать в себя проведение ультразвуковой и/или магнитно-резонансной визуализации. Помимо этого типовой способ может дополнительно включать в себя изменение плана терапии на основе информации о перемещении терапевтических источников и/или информации о перемещении целевой области. Общее время терапии может включать в себя, например, время, приходящееся на одну фракцию, множество фракций и/или все фракции. Эти и другие объекты, признаки и преимущества изобретения по настоящему раскрытию станут очевидными из последующего подробного описания его иллюстративных вариантов осуществления в сочетании с прилагаемыми чертежами.
В данном раскрытии будет дано подробное описание предпочтительных вариантов осуществления со ссылкой на следующие чертежи, где
на фиг. 1 показана блок-схема/блок-схема алгоритма системы/способа для определения полученной дозы согласно одному варианту осуществления;
на фиг. 2 показана блок-схема/блок-схема алгоритма системы/способа для определения дозы, полученной целевой областью, используя информацию о перемещении согласно одному варианту осуществления;
На фиг. 3 показана блок-схема/блок-схема алгоритма системы/способа для определения полученной дозы согласно одному варианту осуществления.
Согласно настоящим принципам представлено распределение дозы с компенсацией движения, полученной целевой областью объекта. В частности, время терапии, например брахитерапии с высокой мощностью дозы (HDR), представлено одной или более временными ячейками. Для каждой ячейки определяется 3D распределение дозы, доставленной радиоактивными источниками в одном или более катетерах, на основе перемещения источников. Предпочтительно для определения формы катетеров применяются технологии восприятия формы. Положение источников в катетерах может определяться посредством запроса устройства подачи источников. 3D распределение дозы, доставленной источниками, определяется с использованием информации о перемещении катетеров и источников и начального плана терапии.
3D распределение дозы, полученной целевой областью, далее может определяться на основе информации о перемещении целевой области. В предпочтительном варианте осуществления информацию о перемещении целевой области можно определять с использованием визуализации, такой как ультразвуковая. Могут рассчитываться функции распределения вероятностей для схем перемещений для каждого воксела целевой области. Функции распределения вероятностей для каждого воксела могут подвергаться свертке с 3D распределением дозы, доставленной источниками, для построения 3D распределения дозы, полученной целевой областью в рамках этой временной ячейки. Если информация о перемещении целевой области недоступна, например, если невозможно выполнить визуализацию, 3D распределение дозы, полученной целевой областью, определяется как 3D распределение дозы, доставленной источниками. Общая доза, полученная целевой областью, может определяться путем суммирования 3D распределений дозы, полученной целевой областью, для каждой из одной или более временных ячеек.
Предпочтительно доза, полученная целевой областью, может использоваться для адаптивного планирования терапии согласно одному варианту осуществления. Например, доза, полученная целевой областью, может использоваться для изменения плана терапии во время доставки или между фракциями терапии. В других вариантах осуществления доза, полученная целевой областью, может использоваться для предоставления ретроспективной информации в целях контроля качества проведения терапии.
Следует также понимать, что настоящее изобретение будет описано в терминах медицинских инструментов и процедур; однако идеи настоящего изобретения распространяются гораздо шире и применимы к мониторингу любой интервенционной процедуры. В некоторых вариантах осуществления настоящие принципы используются для анализа сложных биологических или механических систем. Например, настоящие принципы могут быть, в общем, применимы к мониторингу терапии при любой интервенционной лечебной процедуре. В других вариантах осуществления настоящие принципы применимы к внутренним процедурам отслеживания биологических систем, процедурам во всех областях организма, например легких, желудочно-кишечном тракте, органах выделения, кровеносных сосудах и т.д. Элементы, представленные на фигурах, могут быть реализованы в различных комбинациях аппаратного обеспечения и программного обеспечения и могут выполнять функции, которые могут быть объединены в одном элементе или множестве элементов.
Функции различных элементов, представленных на фигурах, могут выполняться посредством использования специализированного аппаратного обеспечения и аппаратного обеспечения, способного выполнять программы совместно с соответствующим программным обеспечением. В случае функций, выполняемых процессором, функции могут выполняться одним специализированным процессором, одним процессором общего назначения или множеством отдельных процессоров, некоторые из которых могут быть процессорами общего назначения. Кроме того, явное использование термина "процессор" или "контроллер" не должно толковаться как относящееся исключительно к аппаратному обеспечению, способному выполнять программы, но также может в неявном виде означать, не ограничиваясь перечисленным, аппаратное обеспечение на базе цифрового сигнального процессора ("DSP"), постоянное запоминающее устройство ("ROM") для хранения программного обеспечения, запоминающее устройство с произвольной выборкой ("RAM"), энергонезависимое запоминающее устройство и т. д.
Кроме того, все формулировки в настоящем описании, в которых излагаются принципы, аспекты и варианты осуществления изобретения, и их конкретные примеры охватывают как конструкционные, так и функциональные их эквиваленты. Кроме того, предполагается, что такие эквиваленты включают в себя как эквиваленты, известные в настоящее время, так и эквиваленты, которые будут разработаны в будущем (т. е. любые разработанные элементы, выполняющие ту же функцию, вне зависимости от конструкции). Таким образом, например, специалистам в данной области техники ясно, что блок-схемы, приведенные в настоящем описании, представляют концептуальные виды примеров компонентов системы и/или схемы, реализующие принципы изобретения. Точно так же следует понимать, что любые блок-схемы алгоритма, блок-схемы последовательности выполняемых операций и т.п. представляют различные процессы, которые могут быть по существу представлены на машиночитаемом носителе и могут выполняться компьютером или процессором вне зависимости от того, показан ли такой компьютер или процессор в явном виде.
Помимо этого варианты осуществления настоящего изобретения могут иметь форму компьютерного программного продукта, доступного из допускающего возможность использования компьютером или машиночитаемого носителя информации, предоставляющего программный код для использования компьютером или любой системой выполнения команд либо в связи с их использованием. В описательных целях допускающий возможность использования компьютера или машиночитаемый носитель информации может представлять собой любой инструмент, который может включать в себя, хранить, передавать, распространять или переносить программу для использования системой выполнения команд, инструментом или устройством либо в связи с их использованием. Носитель может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (инструмент или устройство) либо среду распространения. В число примеров машиночитаемого носителя входят полупроводниковая или твердотельная память, магнитная лента, съемный компьютерный диск, запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. В число примеров современных оптических дисков входят компакт-диск постоянной памяти (CD-ROM), компакт-диск с возможностью чтения/записи (CD-R/W), Blu-Ray™ и DVD.
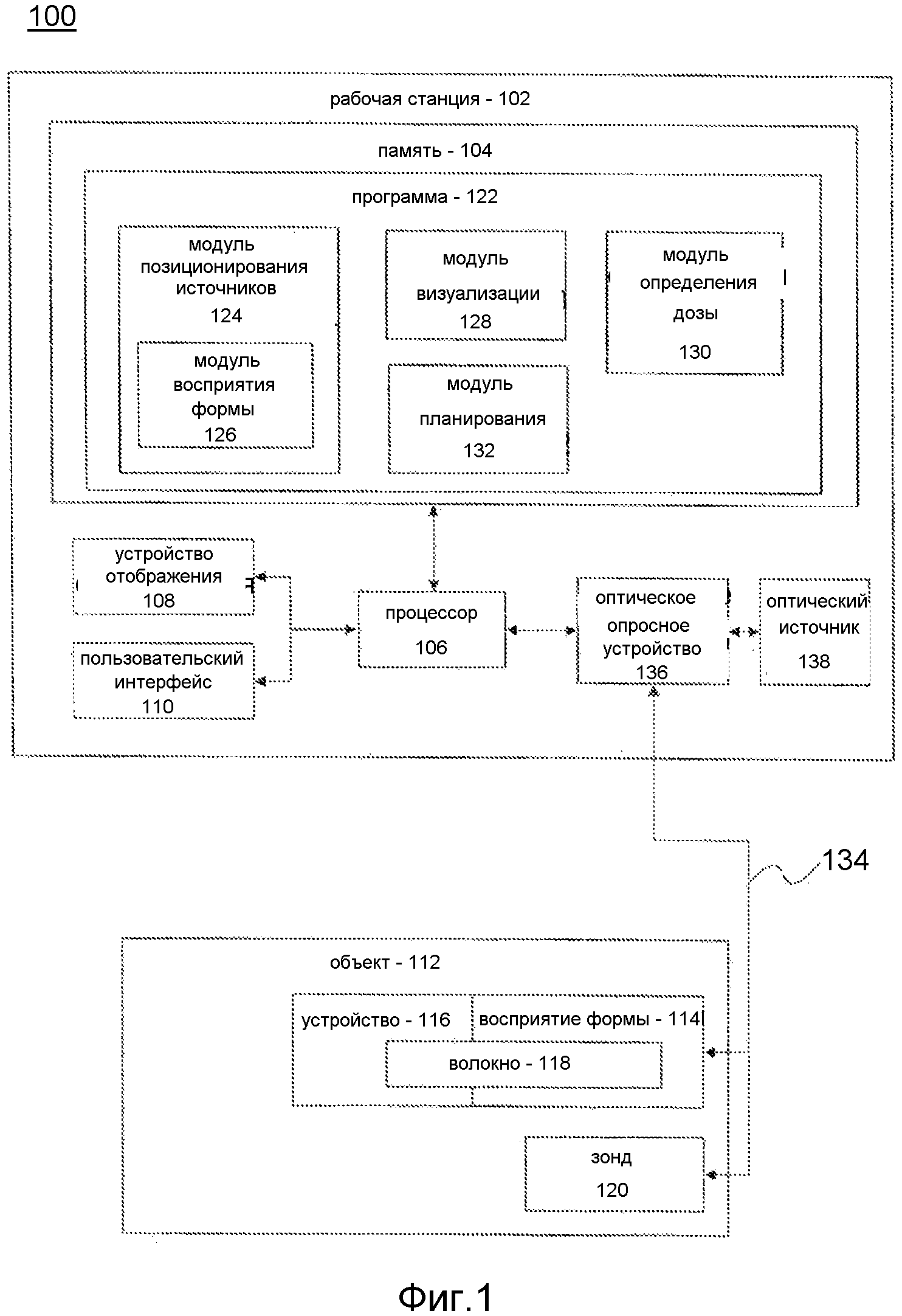
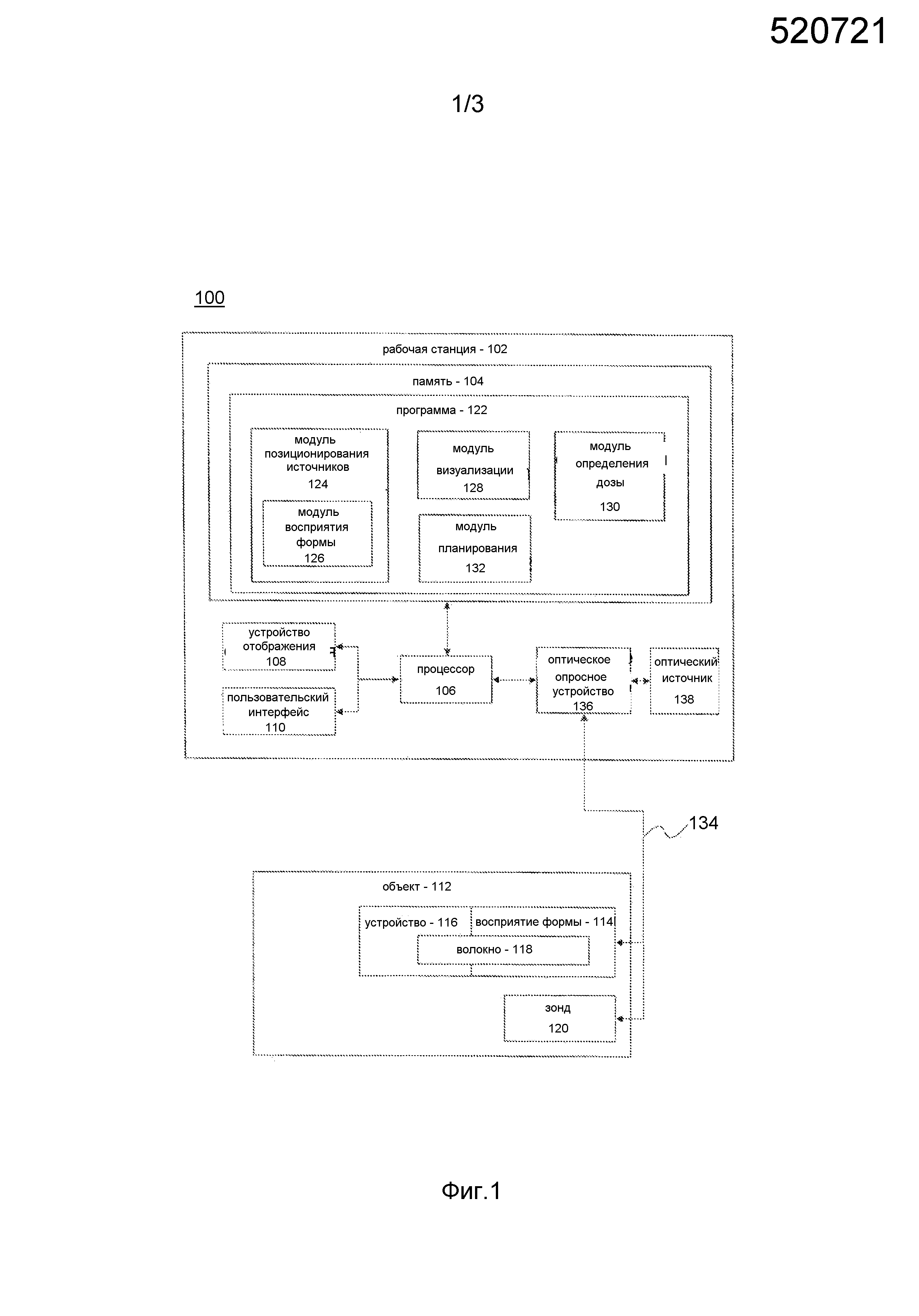
Обратимся теперь к чертежам, на которых одинаковые ссылочные позиции обозначают одинаковые или схожие элементы, и начнем с фиг. 1, на которой изображена блок-схема системы 100 для определения полученной дозы согласно одному варианту осуществления. Система 100 может включать в себя рабочую станцию или консоль 102, с которой осуществляется контроль и управление процедурами (например, HDR брахитерапии). Рабочая станция 102 предпочтительно включает в себя один или более процессоров 106 и память 104 для хранения программ и приложений. Следует понимать, что функциональные блоки и компоненты системы 100 могут быть интегрированы в одну или более рабочих станций или систем.
Рабочая станция 102 может включать в себя одно или более устройств 108 отображения для визуализации. Устройство 108 отображения может также позволить пользователю взаимодействовать с рабочей станцией 102 и ее компонентами и функциональными блоками. Этому дополнительно способствует пользовательский интерфейс 110, который может включать в себя клавиатуру, манипуляторы типа «мышь» и «джойстик» либо любые другие периферийные устройства или органы управления, чтобы позволить пользователю взаимодействовать с рабочей станцией 102.
Память 104 может хранить реализуемую на компьютере программу 122, в том числе модуль 124 позиционирования источников, выполненный с возможностью определения перемещения источников (например, радиоактивных) в одном или более устройств или инструментов 116. Устройства 116 предпочтительно включают в себя катетер, но могут включать в себя одно или более из следующих устройств: проволочный направитель, зонд, эндоскоп, робот, электрод, фильтровальное устройство, баллонное устройство или другие компоненты и пр. Катетеры 116 могут располагаться в объекте 112 (например, пациенте) для проведения терапии, например брахитерапии с высокой мощностью дозы (HDR). Настоящие принципы могут также применяться к другим типам терапии и процедур.
В модуле 124 позиционирования источников может применяться система восприятия формы, включающая в себя модуль 126 восприятия формы, для точного и непрерывного отслеживания формы и расположения в отношении катетера 116 и/или окружающей его области. Система восприятия формы может включать в себя оптическое опросное устройство 136, выдающее выборочные сигналы и принимающее оптический отклик. Может быть предусмотрен оптический источник 138 в виде части опросного устройства 136 или в виде отдельного блока для подачи световых сигналов в устройство 114 восприятия формы. Устройство 114 восприятия формы включает в себя одно или более оптических волокон 118, которые могут быть соединены с катетером 116 по заданной схеме или заданным схемам. Оптические волокна 118 могут быть встроены в катетер 116 или могут представлять собой отдельный блок для проведения световых сигналов в устройство 114 восприятия формы. Волокна 118 могут соединяться с рабочей станцией 102 посредством кабельного соединения 134. Кабельное соединение может включать в себя волоконную оптику, электрические соединения или иметь иное оснащение по необходимости. Модуль 126 восприятия формы выполнен с возможностью интерпретации оптических сигналов обратной связи (и любых других сигналов обратной связи, например электромагнитного (EM) отслеживания), от устройства или системы 114 восприятия формы. Возможны и другие способы отслеживания формы и расположения катетера 116.
Восприятие 114 формы с использованием волокна 118 может быть реализовано с применением любого механизма волоконно-оптической передачи/отражения сигнала. Например, восприятие 114 формы с использованием волокна 118 может быть реализовано с применением одного или более из следующего: распределенное восприятие с демультиплексированием по длине волны, распределенное восприятие с демультиплексированием по длине волны и времени, интерферометрическое детектирование, определение рассеяния по амплитуде и т.д. Предпочтительно восприятие 114 формы с использованием волокна 118 основано на принципе волоконной брэгговской решетки (ВБР); однако возможны и другие подходы, например с использованием рэлеевского рассеяния, рамановского рассеяния или бриллюэновского рассеяния. ВБР - короткий сегмент оптического волокна, отражающий определенные длины волн света и пропускающий все остальные. Это достигается путем добавления периодического изменения показателя преломления в сердцевине волокна, что создает избирательное по длине волны диэлектрическое зеркало. Волоконная брэгговская решетка, таким образом, может использоваться в качестве встроенного оптического фильтра для блокирования определенных длин волн или в качестве избирательного по длине волны отражателя.
Форма волокон 118 в любой точке пространства по их длине зависит от внутренней деформации, созданной в волокне. Брэгговская длина волны чувствительна к этой деформации. Модуль 126 восприятия формы может использовать деформацию в трех или более ВБР (по одной в каждом волокне 118 в группе из трех волокон 118) для расчета локального изгиба в группе волокон. Таким образом, складывается форма волокна. Априорное знание местоположений ВБР вдоль волокна может быть использовано для выполнения оценок формы и положения волокна в требуемой системе координат.
Модуль 124 позиционирования источников может также определять положение источников в катетере 116 в любой заданный момент времени, например путем опроса устройства подачи источников (не показано). Начальный план терапии может задавать положения задержек, представляющие собой местоположения в катетерах 116, в которых требуется расположить источники, и времена задержек, представляющие собой продолжительность времени пребывания в каждом местоположении. Устройство подачи источников используется для последовательного расположения источников в катетер 116. Модуль 124 позиционирования источников может сочетать позиционирование источников в катетерах 116 с информацией о форме катетера 116, определенной модулем 126 восприятия формы, для предоставления информации о перемещении источников в обычной системе координат (например, в системе координат трансректального УЗИ).
Реализуемая на компьютере программа 122 может дополнительно включать в себя модуль 128 визуализации, выполненный с возможностью определения формы и перемещения целевой области объекта 112. Область ткани, для которой выполняется оценка полученной дозы, может включать в себя органы, подверженные риску (OAR), в дополнение к целевой области. Предпочтительно может выполняться трехмерная (3D) трансректальная ультразвуковая (ТРУЗИ) визуализация в режиме реального времени для сбора 3D-волюметрических данных о целевой области. При выполнении ТРУЗИ-визуализации может использоваться двумерная или одномерная матрица на трансректальном зонде 120. Зонд 120 может управляться механически или электрически. Зонд 120 может соединяться с рабочей станцией 102 посредством кабельного соединения 134. Возможны и другие технологии визуализации, например компьютерная томография (CT), магнитно-резонансная визуализация (MRI) и т. д.
Реализуемая на компьютере программа 122 может включать в себя модуль 130 определения дозы, выполненный с возможностью определения оцененного 3D распределения дозы, полученной целевой областью. Модуль 130 определения дозы может сочетать информацию о перемещении, определенную модулем 124 позиционирования источников и/или модулем 128 визуализации, с начальным планом терапии, например HDR брахитерапии, для оценки 3D распределения дозы, полученной целевой областью и/или доставленной в нее. Начальный план терапии может указывать положения задержек и времена задержек источников в катетерах 116, введенных в объект 112. Модуль 130 определения дозы предпочтительно может определять 3D планирование дозы с использованием способов на основе, например, протокола рабочей группы № 43 американской ассоциации медицинских физиков (American Association of Physicists in Medicine (AAPM) Task Group (TG) Number 43) для линейных источников. Возможны и другие способы определения 3D планирования дозы. 3D распределение дозы от каждого источника может аддитивно складываться в 3D планировании дозы для создания кумулятивного 3D распределения дозы.
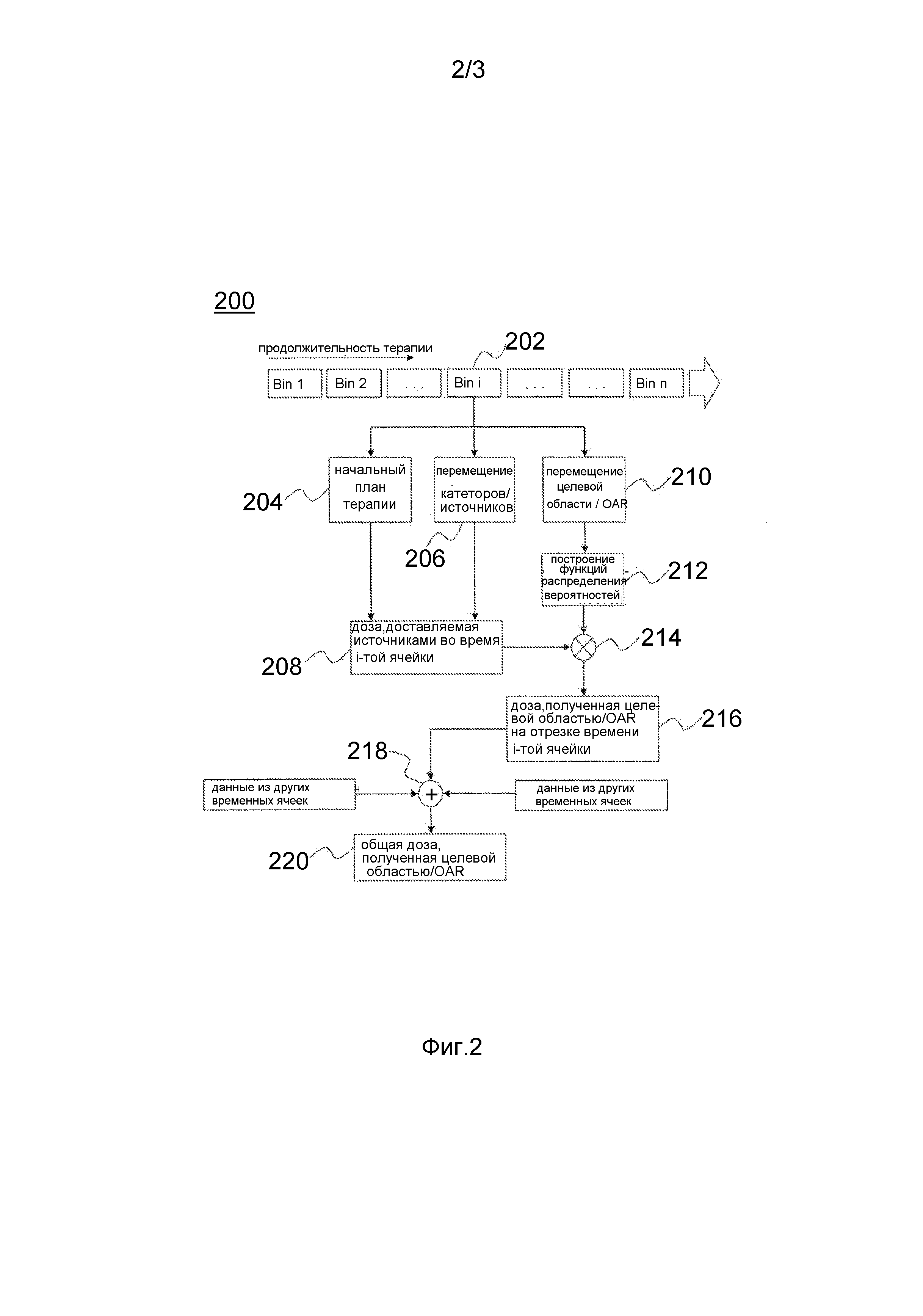
Кроме того, модуль 130 определения дозы может выполнить оценку 3D дозы, полученной целевой областью, если доступна информация о перемещении источников в катетерах 116, и информация о перемещении целевой области. Обратимся к фиг. 2, где представлена блок-схема/блок-схема алгоритма 200 для определения дозы, полученной целевой областью, согласно одному варианту осуществления, а затем вернемся к фиг. 1. Идея заключается в том, чтобы пересчитать 3D распределение дозы для меньших временных ячеек и соотнести результаты расчета с положениями целевой области и/или OAR в соответствующие моменты времени.
Создано множество временных ячеек, n, 202, которые в сумме равны полному времени терапии. Время терапии может включать в себя время, например, на одну фракцию, множество фракций, фракций, проведенных за некоторый период времени, всех проводимых фракций и т.д. Первоначально определяется 3D распределение дозы, доставленной источниками. Для каждой ячейки 202 информацию о перемещении источников 206, определенную модулем 124 позиционирования источников, объединяют с начальным планом 204 терапии для расчета 3D распределения 208 дозы, доставляемой источниками на отрезке времени ячейки 202. Предпочтительно 3D распределение доставляемой дозы определяется с использованием, например, AAPM TG 43. В одном варианте осуществления 3D распределение доставляемой дозы рассчитывается с использованием положений и времен задержек радиоактивных источников внутри каждого катетера 116 и известной схемы распределения радиоактивности каждого источника для расчета общей доставляемой дозы. В другом варианте осуществления может определяться соотношение (например, математическое) между перемещением источника и конечным влиянием на дозу. Таким образом, доставляемая доза может быть определена из схем перемещения источников и начального распределения дозы, не прибегая к необходимости пересчета дозы. Возможны и другие варианты осуществления определения 3D распределения доставляемой дозы.
Для каждой ячейки 202 информацию 210 о перемещениях целевой области, определенную модулем 128 визуализации, можно использовать для определения 3D распределения дозы, полученной целевой областью. Для каждого воксела целевой области объекта 112 осуществляется построение функций (PDF) 212 распределения вероятностей для схем перемещений. Функция распределения вероятностей для каждого воксела представляет процентную долю времени пребывания воксела в данной области пространства. Процентные доли для каждого воксела суммируются до 100%. PDF для каждого воксела рассчитывается путем первоначального количественного определения схемы перемещений целевой области. Схемы перемещений могут включать в себя, например, поступательные перемещения и повороты из заданного начального положения. Схемы перемещений могут применяться к каждому целевому вокселу для расчета относящейся к нему PDF.
Производится свертка 214 PDF для каждого воксела целевой области с 3D распределением дозы, полученной в статических условиях, для всей целевой области с целью определения дозы, полученной этим вокселом при наличии перемещения, и, таким образом, 3D распределения дозы, полученной на отрезке времени ячейки 202. Кумулятивное 3D распределение 220 дозы, полученной целевой областью за все время терапии, может определяться путем аддитивного 218 сложения 3D распределения доз, полученных для каждой ячейки 202.
Если информация о перемещении целевой области недоступна в силу технических ограничений или других проблем, не позволяющих использовать технологии визуализации, такие как ТРУЗИ, система 100 по-прежнему может работать в предположении, что целевая область статична. Таким образом, для каждой ячейки 202 3D распределение доставленной дозы считается эквивалентным 3D распределению дозы, полученной целевой областью. Общее 3D распределение дозы, полученной целевой областью за все время проведения терапии, может определяться путем аддитивного сложения 3D распределений доз, полученных на отрезке времени каждой ячейки 202.
Реализуемая на компьютере программа 122 может дополнительно включать в себя модуль 132 планирования. Модуль 132 планирования может содержать одно или более устройств 108 отображения и/или пользовательских интерфейсов 110. В одном варианте осуществления модуль 132 планирования может обеспечивать обратную связь в режиме реального времени врачу в ходе проведения терапии. Модуль 132 планирования может выдавать предложения для изменения или выполнять автоматическое изменение плана терапии на основе обновленной информации о перемещении источников и катетеров 116 и целевой области. Например, если распределение дозы, полученной целевой областью, меньше запланированной дозы, например, в задней части целевой области, тогда положения задержек и времена задержек радиоактивных источников в катетерах 116, наиболее близких к задней части целевой области, могут быть соответствующим образом отрегулированы (например, увеличены), чтобы компенсировать снижение дозировки в этой части.
В другом варианте осуществления модуль 132 планирования может обеспечить ежедневное адаптивное планирование терапии. Модуль 132 планирования может обеспечить ежедневную обратную связь в форме кумулятивной 3D дозы, доставленной в целевую область, для всех проведенных фракций. Модуль 132 планирования может выдавать предложения для изменения или выполнять автоматическое изменение плана терапии для оставшихся фракций.
В еще одном варианте осуществления модуль 132 планирования может осуществлять ретроспективное планирование и доставку для контроля качества. Модуль 132 планирования может выполнять ретроспективные оценки 3D распределения дозы, доставленной в целевую область, в целях контроля качества. Может быть построена база данных, соотносящая результаты дозиметрии с характеристиками пациентов. Характеристики пациентов могут включать, например, возраст, вес, тип заболевания, стадию заболевания и т.д. Могут быть использованы и другие характеристики.
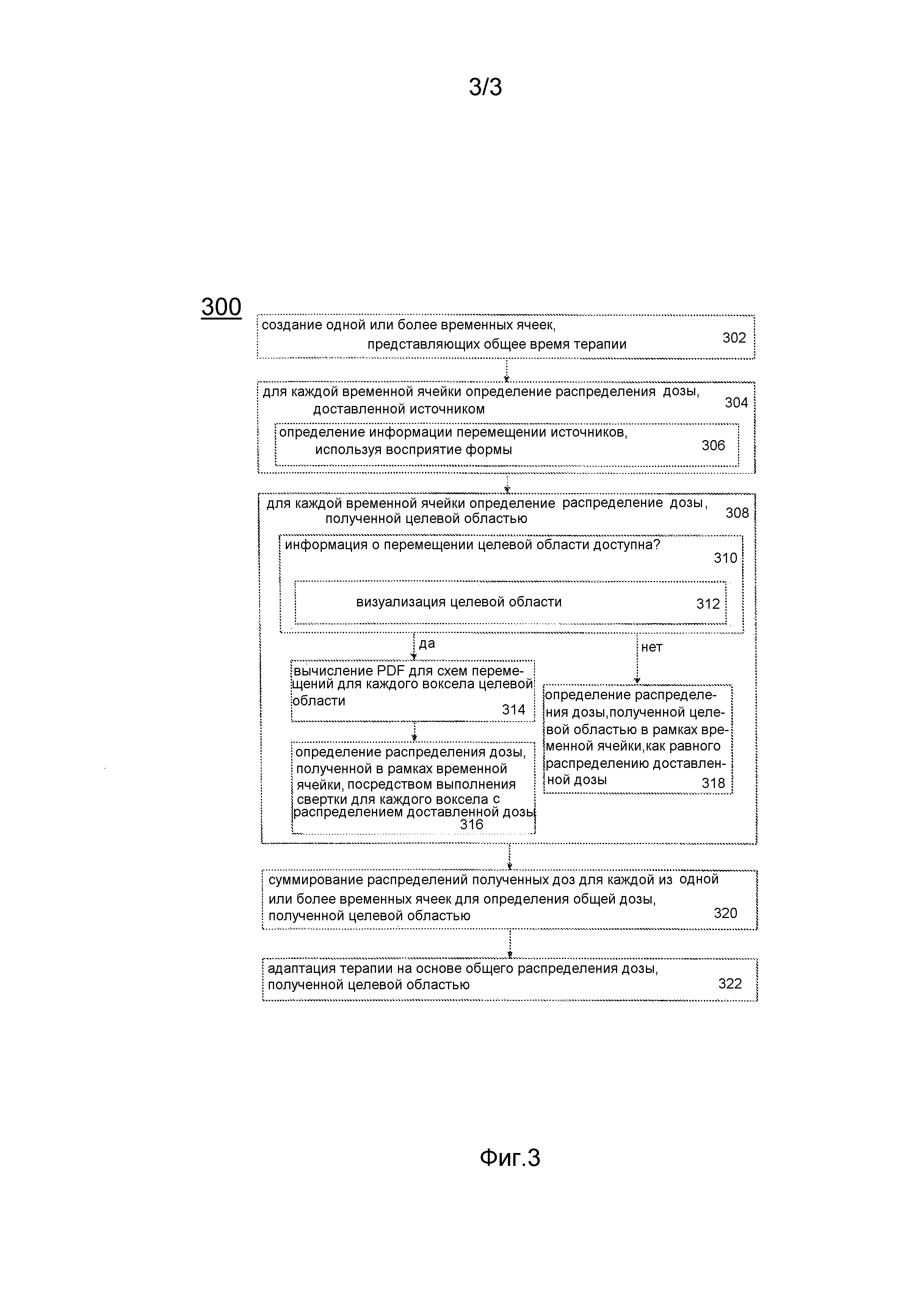
На фиг. 3 показана блок-схема алгоритма способа 300 оценки дозы, полученной целевой областью, согласно одному варианту осуществления. В блоке 302 создаются одна или более временных ячеек, в совокупности представляющих общее время терапии. Общее время терапии может представлять, например, отдельную фракцию, множество фракций, фракции, проведенные за некоторый период времени, все проводимые фракции и т.д. Идея заключается в том, чтобы пересчитать 3D распределение доставленных доз для меньших временных ячеек и соотнести результаты расчета с положениями целевой области в эти моменты времени, чтобы рассчитать 3D распределение дозы, полученной целевой областью. Область ткани, для которой проводится оценка полученной дозы, может включать в себя OAR в дополнение к целевой области.
В блоке 304 для каждой временной ячейки 3D определяется распределение дозы, доставленной источником (например, радиоактивным). Источник предпочтительно расположен в устройстве, таком как катетер; однако следует отметить, что устройство может включать в себя одно или более из следующих устройств: проволочный направитель, зонд, робот, электрод, фильтровальное устройство, баллонное устройство или другие медицинские компоненты. Катетер расположен в объекте (например, пациенте) терапии. В блоке 306 определение распределения дозы, доставленной источником, может включать в себя определение перемещения источника. В предпочтительном варианте осуществления может использоваться восприятие формы для отслеживания формы и расположения катетера и/или окружающей его областей. Восприятие формы может включать в себя интерпретацию сигналов обратной связи (например, оптических, EM и т.д.), поступающих от устройства восприятия формы. Возможны и другие способы определения перемещения источника.
Восприятие формы может включать в себя использование одного или более оптических волокон. Оптические волокна могут быть встроены в катетер или могут представлять собой отдельный блок. Восприятие формы может быть реализовано с применением любого механизма волоконно-оптической передачи/отражения сигнала. Например, восприятие формы может быть реализовано с применением одного или более из следующих способов: распределенное восприятие с демультиплексированием по длине волны, распределенное восприятие с демультиплексированием по длине волны и времени, интерферометрическое детектирование, определение рассеяния по амплитудному признаку и т.д. Предпочтительно восприятие формы основано на принципе волоконной брэгговской решетки (ВБР); однако возможны и другие подходы, например с использованием рэлеевского рассеяния, рамановского рассеяния или бриллюэновского рассеяния.
Форма волокон в любой точке пространства по их длине зависит от внутренней деформации, созданной в волокне. Для восприятия формы может использоваться деформация в трех или более ВБР (по одной в каждом волокне в группе из трех волокон) для расчета локального изгиба в группе волокон. Таким образом, складывается форма волокна. Априорное знание местоположений ВБР вдоль волокна может быть использовано для выполнения оценок формы и положения волокна в требуемой системе координат.
В одном варианте осуществления определение 3D распределения дозы, доставленной источником, включает в себя определение положения источника в катетере. Устройство подачи источников может запрашиваться для определения положения задержек в любой заданный момент времени. Форма катетера (например, с использованием восприятия формы) и положение источника могут быть объединены для получения распределения дозы, доставленной источником. Предпочтительно 3D распределение доставленной дозы определяется с использованием, например, AAPM TG 43. В одном варианте осуществления 3D распределение доставленной дозы рассчитывается с использованием положений и времен задержек радиоактивных источников внутри каждого катетера и известной схемы распределения радиоактивности каждого источника для расчета общей доставляемой дозы. В другом варианте осуществления может определяться взаимосвязь (например, математическая) между перемещением источника и конечным влиянием на дозу. Таким образом, доставляемая доза может быть определена из схем перемещения источников и начального распределения дозы, не прибегая к необходимости пересчета дозы. Возможны и другие варианты осуществления определения 3D распределения доставляемой дозы.
В блоке 308 для каждой временной ячейки определяется 3D распределение дозы, полученной целевой областью. В блоке 310 определяется, доступна ли информация о перемещении целевой области. Информацию о перемещении предпочтительно можно получить из визуализации целевой области, осуществляемой в блоке 312. Визуализация целевой области предпочтительно включает в себя ТРУЗИ в режиме реального времени. В ТРУЗИ-визуализации может использоваться двумерная или одномерная матрица на трансректальном зонде. Зонд может управляться механически или электрически. Возможны и другие технологии визуализации, например CT, MRI и т.д.
Если информация о перемещении целевой области доступна, в блоке 314 вычисляются PDF для схем перемещений для каждого воксела целевой области. В блоке 316 3D распределение дозы, полученной в рамках этой временной ячейки, определяется путем выполнения свертки для каждого воксела с распределением дозы, доставленной источником. В блоке 318, если информация о перемещении целевой области недоступна, 3D распределение дозы, полученной целевой областью в рамках этой временной ячейки, определяется как равное 3D распределению доставленной дозы для этой временной ячейки. Информация о перемещении может быть недоступна в силу, например, технических ограничений или иных проблем, не позволяющих использовать визуализацию. В блоке 320 общее распределение дозы, полученной целевой областью, определяется путем суммирования распределения доз, полученных для каждой из одной или более временных ячеек.
В блоке 322 терапия может быть адаптирована на основе общего распределения дозы, полученной целевой областью. В одном варианте осуществления врачу может предоставляться обратная связь в режиме реального времени по ходу терапии. На основе обновленной информации о перемещении источника и/или целевой области могут выдаваться предложения об изменениях или выполняться автоматические изменения плана терапии. Например, если распределение дозы, полученной целевой областью, меньше запланированной дозы, например, в задней части целевой области, тогда положения задержек и времена задержек радиоактивных источников в катетерах, наиболее близких к задней части целевой области, могут быть соответствующим образом отрегулированы (например, увеличены), чтобы компенсировать снижение дозировки в этой части.
В другом варианте осуществления может проводиться повседневное адаптивное планирование терапии. Например, кумулятивное 3D распределение дозы, доставленной в целевую область, может предоставляться для всех выполненных фракций. Предложения изменения или автоматическое изменение плана терапии может предоставляться для оставшихся фракций. В еще одном варианте осуществления в целях контроля качества может определяться ретроспективное 3D распределение дозы, доставленной источниками, и, как вариант, ретроспективное 3D распределение дозы, полученной тканью. Может быть построена база данных, связывающая результаты дозиметрии с характеристиками пациентов. Характеристики пациентов могут включать, например, возраст, вес, тип заболевания, стадию заболевания и т.д.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) термин "содержащий" не исключает наличия других элементов или действий помимо перечисленных в соответствующем пункте формулы изобретения;
b) упоминание элемента в единственном числе не исключает наличия множества таких элементов;
c) ни одна из ссылочных позиций в формуле изобретения не ограничивает объем ее притязаний;
d) несколько "средств" могут быть представлены одним и тем же элементом либо реализованной аппаратным обеспечением или программным обеспечением структурой или функцией;
e) предполагается, что соблюдение конкретной последовательности действий не требуется, если иное не указано конкретно.
Представив описание предпочтительных вариантов осуществления расчета дозы с компенсацией движения, полученной тканью при проведении процедур брахитерапии с высокой мощностью дозы (которые носят иллюстративный, но не ограничительный характер), следует отметить, что специалисты в данной области техники смогут внести различные изменения в свете вышеизложенных идей. Таким образом, следует понимать, что в конкретные варианты осуществления, приведенные в настоящем раскрытии, могут быть внесены изменения в объеме притязаний прилагаемой формулы изобретения. Таким образом, по представлению описания деталей и особенностей, как того требует патентный закон, изобретение, требующее правовой охраны, изложено в прилагаемой формуле изобретения.
Крышка для кухонного комбайна
Система и способ регулировки максимального выходного управляющего напряжения твердотельного осветительного устройства
Передача сигналов и электропитания
Аппарат для обнаружения, содержащий два сцинтиллятора для обнаружения рентгеновского излучения
Аннотатор сосудов
Мр-сегментирование с использованием радионуклидных эмиссионных данных в смешанном радионуклидном/мр формировании изображения
Приводная муфта для высокооборотной щетки
Процессор аудиосигналов для обработки кодированных многоканальных аудиосигналов и способ для этого
Компоновка схемы для управления блоком сид и способ его эксплуатации
Аудиосистема и способ для нее
Изучение дозиметрического воздействия движения на формирование адаптивных границ для конкретного пациента при планировании наружной дистанционной лучевой терапии
Вычисление дозы на уровне сегментов пучка и отслеживание движения во времени для адаптивного планирования лечения
Лучевая терапия с адаптивным расчетом дозы в реальном масштабе времени
Калибровочное приспособление

