Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области комплексного контроля датчиков подвижных объектов, входящих в состав систем ориентации, навигации летательных аппаратов, кораблей, антенных постов, астрономических приборов и, в частности, средств аппаратурно-безызбыточного диагноза датчиков Эйлеровых углов поворота на синусно-косинусных вращающихся трансформаторах, являющихся практически идеальным устройством с точки зрения приспособленности к решению задач преобразования координат. Оно также может быть использовано для создания точных, простых, быстродействующих устройств достоверного обнаружения отказов и сбоев вычислителей ориентации подвижных объектов.
Известен способ контроля датчиков угла на вращающихся трансформаторах компенсационным методом (Баканов М.В., Лыска В.А., Алексеев В.В. Информационные микромашины следящих и счетно-решающих систем (вращающиеся трансформаторы, сельсины). М.: Сов. радио, 1977. С. 3, 49, 51, 52). При этом ведется сравнение показаний контролируемого датчика с показанием эталонного прибора. Класс точности эталонного прибора выше проверяемого вращающегося трансформатора. Оба датчика установлены в оптико-механическое угломерное и делительное устройство для задания и отсчета точных углов поворота роторов.
Основные недостатки здесь связаны с временем обнаружения отказа конкретного датчика, большим объемом и продолжительностью контроля только в наземных условиях, большими трудозатратами по извлечению датчиков из аппаратуры, демонтажем и последующей сборкой и настройкой сложной и точной навигационной аппаратуры. Погрешность контроля 3σα=2 угл. сек.
Известен способ контроля датчиков систем ориентации с применением пороговой оценки результатов измерений сигналов комплекса и параметров полета (Беляевский Л.С, Новиков B.C., Олянюк П.В. Обработка и отображение радионавигационной информации. М.: Радио и связь, 1990. с. 114-119, 63, 95). Способ состоит в n-кратном измерении контролируемого параметра, вычислении отношения правдоподобия с учетом среднего риска принятия решения об исправности датчика. Для достоверного контроля необходимо иметь точное описание законов распределения всех контролируемых полетных параметров комплекса, что практически невозможно. Усложнение способа, построение оптимального решающего правила при аддитивной связи контролируемых сигналов и погрешностей измерения, приводит к проверке сложных гипотез контроля. Такой контроль при широких диапазонах изменения проверяемых сигналов рыскания, крена, тангажа аппарата крайне затруднен. Погрешность контроля 3σα=0,25÷2,7 угл. град.
Известен и широко применяется способ контроля датчиков пилотажно-навигационных комплексов на основе заранее определенных тестов (Богданченко Н.М. Курсовые системы и их эксплуатация. М.: Транспорт, 1983, С. 105, 127; Руководство по технической эксплуатации самолета ИЛ-86. Под ред. С.В. Кузнецова. 2009; Бородин В.Т., Рыльский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. М.: Машиностроение, 1978. с. 133). Контроль только на земле может проводиться в статическом и динамическом режимах. Статический режим основан на подборе заранее определенных тестов, которые подаются в контролируемые датчики. Реализуется два вида оценки: либо контрольные коды поступают из постоянного запоминающего устройства БЦВМ, а оценка результатов производится визуально по приборам комплекса, либо значения контрольных параметров поступают из датчиков комплекса в БЦВМ, где производится их сравнение с уставками. Входная информация анализируется на совпадение с заданной. Сравнением определяется отказ систем, но не конкретного датчика угла на вращающемся трансформаторе. Динамический режим или имитация полета применяется для проверки функционирования программ в БЦВМ. Контроль производится в реальном или ускоренном масштабе времени. Способ применим для предполетного или регламентного контроля, его применение в полете нарушает нормальное функционирование пилотажно-навигационного комплекса и требует вмешательства летчика. Погрешность контроля 3σα=7÷10 угл. град.
Известен способ контроля пилотажно-навигационного комплекса самолета ИЛ-86 (Воробьев В.Г., Глухов В.В, Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С. 290, 368, 375; Морозов В.В., Баринова Т.В. Приборное оборудование самолета ИЛ-86 и его эксплуатация. Учебное пособие. Ульяновск: Центр ГА СЭВ, 1989), в котором широко применяется аппаратная избыточность датчиков рыскания, тангажа, крена трех инерциальных курсовертикалей (ИКВ), реализуемый мажоритарными блоками контроля крена (БКК), базовой системой курса и вертикали (БСКВ). Среднее значение трех одноименных полетных параметров с мажоритарного блока сравнивается с выходными сигналами датчиков и по рассогласованию делается вывод об исправности соответствующего прибора или системы. Способ обеспечивает достаточно высокую информационную производительность обнаружения отказов пилотажно-навигационного комплекса аэробуса ИЛ-86, где трехкратное увеличения веса, габаритов, энергопотребления, стоимости приборного оборудования вполне допустимо. Однако сложность такого контроля, и как следствие его низкая надежность и достоверность обнаружения отказа, именно синусно-косинусного датчика угла, содержащего например типовые элементы: инерциальную курсовертикаль ИКВ-802 (среднее время наработки на отказ ТИКВ=500 час.), бортовую цифровую вычислительную машину БЦВМ80 30301 (среднее время наработки на отказ ТБЦВМ=18000 час.) делает его малоэффективным по достоверности РД1=0,59; ТД1=3,8 час0., при полетном времени t=2 часа. Погрешность контроля БКК-18 здесь составляет 3σα=7±2 угл. град., погрешность БСКВ-3σα=5±2 угл. град. (Голинкевич Т.А. Оценка надежности радиоэлектронной аппаратуры. М.: Советское радио, 1969. 176 с).
Известен способ контроля пилотажно-навигационного комплекса и его датчиков с применением наблюдателей состояния, объединяемых фильтром Калмана или Льюенбергера (Кузовков Н.Т. Системы стабилизации летательных аппаратов. М.: Высшая школа, 1976. с. 191-205; Авиационная радионавигация: Справочник. Под ред. А.А. Сосновского. М.: Транспорт, 1990. с. 30-31). Наблюдатель состояния строится на основе модели объекта контроля и помех, подключенной параллельно и охваченной дополнительной обратной связью по сигналу рассогласования модели и объекта. При этом коэффициент обратной связи выбирается таким образом, чтобы выход модели как можно точнее совпадал с выходом контролируемого пилотажно-навигационного комплекса. Следя за величиной рассогласования, можно осуществить непрерывный контроль за исправностью системы и ее датчиков. Основные трудности в реализации способа заключаются в определении коэффициентов обратной связи по адекватной модели сложного и размерного пилотажно-навигационного комплекса и нестационарных корреляционных функций его случайных помех, диагностике отказа именно высокоточных синусно-косинусных вращающихся трансформаторов. Погрешность контроля для этого способа составляет σα=1,5÷7 угл. мин. с запаздыванием по времени 3-15 мин. (10, с. 191-205; 11, с. 30-31; 12, с. 111, 125, 128, 132;13;14, рис. 3.4, рис. 3.5 и др.).
Известен способ-прототип контроля датчиков системы ориентации подвижного объекта (Матов В.И., Белоусов Ю.А., Федосеев Е.П. Бортовые цифровые вычислительные машины и системы. М.: Высшая школа, 1988. С. 105), основанный на контрольных соотношениях выходных сигналов датчиков. Способ позволяет определить не только ошибки, появляющиеся за счет отказов, но и ошибки, появляющиеся за счет случайных сбоев. Сущность способа заключается в том, что в общий алгоритм работы системы, например ориентации, включаются известные математические соотношения, позволяющие проверить правильность решения задачи путем их реализации. Так при измерении величин и направлений углов α - рыскания, тангажа, крена подвижного объекта, с последующим преобразованием каждого в тригонометрические функции синуса, косинуса углов поворота на выходах контролируемых датчиков, проверяется сумма модулей тригонометрических функций углов вида
 где α - текущее значение угла отклонения рыскания, тангажа, крена подвижного объекта, U - напряжение питания датчиков. Тригонометрические функции углов U sin и U cos получаются на выходах высокоточных датчиков угла, выполненных на электрических машинах - синусно-косинусных вращающихся трансформаторах. Датчики угла получили широкое распространение в современных системах управления, инерциальных системах, приводах антенн, телескопов, счетно-решающих блоков. При выполнении контрольных соотношений с заданной точностью проводится дальнейшее решение основной задачи. При невыполнении контрольных соотношений экипажу подвижного объекта сигнализируют об отказе. Способ прост в реализации и может давать значительный выигрыш в быстродействии, но точность и достоверность контроля невелика из-за нелинейности и нечувствительности составляющих тригонометрических функций к малым изменениям аргумента, например в основном прямолинейном горизонтальном полете. Погрешность контроля 3σα=6 угл. град., практическая достоверность контроля РД2=0,87; ТД2=14,4 часа.
где α - текущее значение угла отклонения рыскания, тангажа, крена подвижного объекта, U - напряжение питания датчиков. Тригонометрические функции углов U sin и U cos получаются на выходах высокоточных датчиков угла, выполненных на электрических машинах - синусно-косинусных вращающихся трансформаторах. Датчики угла получили широкое распространение в современных системах управления, инерциальных системах, приводах антенн, телескопов, счетно-решающих блоков. При выполнении контрольных соотношений с заданной точностью проводится дальнейшее решение основной задачи. При невыполнении контрольных соотношений экипажу подвижного объекта сигнализируют об отказе. Способ прост в реализации и может давать значительный выигрыш в быстродействии, но точность и достоверность контроля невелика из-за нелинейности и нечувствительности составляющих тригонометрических функций к малым изменениям аргумента, например в основном прямолинейном горизонтальном полете. Погрешность контроля 3σα=6 угл. град., практическая достоверность контроля РД2=0,87; ТД2=14,4 часа.
Известно устройство для контроля датчика угла (Ахметжанов А.А. Высокоточные системы передачи угла автоматических устройств. М.: Энергия, 1975. С. 259-261). Датчик устанавливается на оптической делительной головке и содержит генератор импульсов, цепочку триггеров, включенных по схеме деления частоты. С выхода каждого триггера может быть снят сигнал для пуска ждущей горизонтальной развертки - опорного сигнала осциллографа. Частота импульсов соответствует частоте напряжения питания обмотки возбуждения синусно-косинусного вращающего трансформатора. Сигнал выходной обмотки датчика поступает на вход осциллографа, как и опорный импульс триггера. Совпадения импульсов добиваются поворотом ротора датчика. Отклонение от угла 180 угл. град., отсчитанное по делительной головке при совпадении импульсов, равно погрешности датчика. Суммарная погрешность измерения фазы здесь составляет величину порядка 3σα=3-4 угл. мин. Контроль занимает много времени и требует демонтажа синусно-косинусного трансформатора из проверяемой системы в условиях наземной лабораторной проверки.
Известно устройство контроля пилотажных параметров крена и тангажа - блок сравнения и предельного крена (БСПК-1) (Перескоков А.Н. Приборное оборудование вертолетов МИ-8 (Т, МТ, МТВ, АМТ). СПб.: Академия ГА. 2003. с. 19; Бондарчук И.Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. М.: Транспорт.1982. с. 205-206). Устройство содержит две следящие системы с сельсинами-датчиками угла двух одинаковых датчиков тангажа и крена подвижного объекта, релейные усилители, выполняющие функции компараторов, и ламельные схемы сигнализации предельных углов крена и тангажа. Сельсны-датчики здесь могут замещаться синусно-косинусными вращающимися трансформаторами (3, с. 63-64). Имеет место двухканальное сравнение одноименных сигналов тангажа и крена резервированных датчиков горизонта пилотажно-навигационного комплекса подвижного объекта. Габариты, вес, энергопотребление, стоимость такого резервированного устройства велики, а быстродействие, информационная производительность и достоверность контроля низкие. Погрешность контроля 3σα=7±1 угл. град.
Известно устройство контроля пилотажно-навигационного комплекса, содержащее по три одинаковых измерителя тангажа, крена, курса на синусно-косинусных трансформаторах, мажоритарный блок обработки их выходных сигналов типа блока контроля крена (БКК), базовой системы курса и вертикали (БСКВ). (Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991. с. 39, 122; Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. с. 291). Помимо трех одноименных контролируемых датчиков синусно-косинусного типа в одинаковых датчиках тангажа, крена, курса, мажоритарные блоки устройств содержат три нелинейных элемента, образующих кворум-элемент, и компараторы. Последние проводят непрерывное сравнение выходных сигналов каждого из трех одноименных датчиков с их осредненным сигналом, полученным на выходе кворумэлемента каждого канала. Разностный сигнал, пропорциональный крену (курсу, тангажу), сравнивается с допустимой ошибкой измерения. Точность, быстродействие, достоверность контроля сравнительно высока во всем диапазоне измерения пилотажно-навигационного комплекса. Однако, как и для блока сравнения и предельного крена (БСПК), здесь необходимо избыточное число одноименных проверяемых датчиков, что связано с ростом стоимости, габаритов, энергопотребления. Для мажоритарных блоков БКК, БСКВ (среднее время наработки на отказ ТБКК=4500 час., ТБСКВ=4000 час.), при контроле датчиков в ИКВ-802, достоверность контроля будет РД.БКК=0,999508; ТД.БКК=50 час; РД.БСКВ=0,956578; ТД.БСКВ=45 час; Погрешность контроля БСКВ составляет 3σα=5±2 угл. град., БКК - 3σα=7±2 угл. град.
Наиболее близким к заявляемому устройству контроля датчиков системы ориентации подвижного объекта является устройство контроля работы синусно-косинусных трансформаторов инерциальной курсовертикали ИКВ-72 (Воробьев В.Г., Глухов В.В, Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С. 376.). Устройство контроля датчиков системы ориентации подвижного объекта, содержит синусный и косинусный выходы датчика рыскания, синусный и косинусный выходы датчика тангажа, синусный и косинусный выходы датчика крена, первый, второй, третий сумматоры, задатчик постоянного сигнала, первый, второй, третий компараторы, логическую схему ИЛИ, входы которой соединены с выходами компараторов, Курсовертикаль имеет специфический встроенный контроль, который не только контролирует параметры курсовертикали, обнаруживает ее основные неисправности во время предстартовой подготовки и в полете, но и обеспечивает управление режимами ее работы. К особенностям встроенного контроля, обеспечивающего работу курсовертикали, относятся следующие: фиксируются и запоминаются все наиболее вероятные неисправности системы; характеристики элементов встроенного контроля не снижают общей надежности курсовертикали; контроль полностью независим от внешней информации. В каждом канале крена, тангажа, рыскания устройство содержит сумматор, на суммирующие входы которого поступают сигналы модуля с синусного и косинусного элемента каждого датчиков угла, выполненных на синусно-косинусных трансформаторах. Вычитающий вход сумматора соединен с задатчиком постоянного сигнала, а выход - с входом компаратора. Блок встроенного контроля содержит логическую схему ИЛИ, входы которой соединены с выходами компараторов каналов, а выход - служит для информировании об отказе всей системы. Имеет место многоуровневый и многоканальный контроль сложного многопараметрического устройства ИКВ-72. Контроль датчиков угла на синусно-косинусных трансформаторах входит в состав этого устройства контроля. Отсутствие избыточных датчиков, необходимых для обнаружения отказов синусно-косинусных трансформаторов, сделало целесообразным применение этого устройства в курсовертикали. Оно использует информацию датчиков уже имеющихся на борту и входящих в состав штатного приборного оборудования. Устройство контроля, принятое за прототип, является наименьшим по весу, стоимости, габаритам, энергопотреблению имеет сравнительно простую микросхемотехническую или программную реализацию. На основе практического опыта пятилетней работы системы, выбранной за прототип, достоверность контроля синусно-косинусных трансформаторов здесь составляет менее РД.П=0,87, при среднем полетном времени tП=2 час. Это соответствует среднему времени достоверного контроля ТД.П.=14,4 час. Погрешность контроля с учетом порога срабатывания компаратора и крутизны выходной характеристики синусно-косинусного датчика угла здесь составляет 3σα=2 угл. град.
Недостатками известного устройства являются:
- низкая точность контроля из-за приближенного характера трех изолированных контрольных соотношений по каналам рыскания, тангажа и крена;
- контроль не решает задачу диагностики именно синусно-косинусных трансформаторов, а зависит и от отказов всей гироплатформы;
- достоверность контроля сравнительно низкая и зависит от питающих напряжений, выходных сигналов курсовертикали, построена на текущей проверке фиксированного соотношения только для одного канала курсовертикали, сигналы в котором могут изменяться в широком диапазоне полетных углов подвижного объекта;
- не проверяется ортогональность, масштаб исходного - отсчетного и, построенного после поворота на углы рыскания, тангажа, крена, поворотного базиса связанной системы координат, так как нет учета взаимосвязи каналов рыскания, тангажа, крена.
Основной задачей, на решение которой направлены заявленный способ и устройство, является создание аппаратурно безызбыточной комплексной системы контроля
Техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение точности и достоверности обнаружения отказа, информационной производительности, при точности контроля параметров с безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости при одновременном повышении эффективности выполнения полетных задач. При этом обеспечивается работа как в полетном, так и предполетном состоянии комплекса. Контроль строится по безынерционным соотношениям, содержащим простейшие арифметические операции. Конструктивно он просто реализуем на борту летательного аппарата программно, в том числе переносным устройством для широкой номенклатуры однотипных датчиков угла различных систем ориентации.
Технический результат достигается тем, что в способе контроля датчиков системы ориентации подвижного объекта, основанном на измерении величин и направлений углов рыскания, тангажа, крена летательного аппарата, преобразовании каждого в тригонометрические функции синуса, косинуса углов поворота на выходах контролируемых датчиков, сравнении сумм сигналов с допустимыми значениями. Согласно изобретению, значения величины и направления углов поворота подвижного объекта, инвертируют направления и через последовательность изменения крена, тангажа, рыскания, суммируют измеренные значения величин и направлений углов рыскания, тангажа, крена подвижного объекта с инвертированными значениями этих углов в обратной последовательности изменения по крену, тангажу и рысканию, сравнивают результирующее положение подвижного объекта с его исходным положением и делают вывод об отказе датчиков при не совпадении суммы измеренных величин и направлений углов с их инвертированными значениям.
Указанный технический результат достигается тем, что в устройство контроля датчиков системы ориентации подвижного объекта, содержащее синусный и косинусный выходы датчика рыскания, синусный и косинусный выходы датчика тангажа, синусный и косинусный выходы датчика крена, первый, второй, третий сумматоры, задатчик постоянного сигнала, первый, второй, третий компараторы, логическую схему ИЛИ, входы которой соединены с выходами компараторов, дополнительно введены первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый умножители, первый, второй, третий, четвертый, пятый инверторы, четвертый сумматор, первый, второй, третий, четвертый, пятый, шестой преобразователи, четвертый, пятый, шестой компараторы, причем синусный выход датчика рыскания соединен с первыми входами первого, второго, третьего и, через первый инвертор, четвертого умножителей, косинусный выход датчика рыскания соединен с первыми входами пятого, шестого, седьмого, восьмого умножителей, синусный выход датчика тангажа соединен с вторым входом первого умножителя, первым входом девятого умножителя, а также, через второй инвертор, со вторым входом шестого умножителя, косинусный выход датчика тангажа соединен с первыми входами десятого, одиннадцатого умножителей, вторым входом четвертого и пятого умножителя, синусный выход датчика крена соединен со вторыми входами второго, седьмого, десятого и первым входом двенадцатого умножителей, косинусный выход датчика крена соединен со вторым входом третьего, одиннадцатого и первыми входами тринадцатого, четырнадцатого умножителей, выход первого умножителя соединен со вторым входом тринадцатого умножителя, выход которого соединен с первым входом первого сумматора, второй вход которого соединен с выходом седьмого умножителя, выход шестого умножителя соединен со вторым входом четырнадцатого умножителя, выход которого соединен с первым входом второго сумматора, второй вход которого, как и второй вход девятого умножителя, соединен с выходом второго умножителя, выход шестого умножителя, через третий инвертор, соединен со вторым входом двенадцатого умножителя, выход которого соединен с первым входом третьего сумматора, второй вход которого соединен с выходом третьего умножителя, выход девятого умножителя, через четвертый инвертор, соединен с первым входом четвертого сумматора, второй вход которого соединен с выходом восьмого умножителя, второй вход которого соединен с косинусным выходом датчика крена, первый и второй входы первого преобразователя, первый вход второго и третьего преобразователей соединен с выходом пятого умножителя, третий и четвертый входы первого преобразователя, третьи входы второго и третьего преобразователей соединены с синусным выходом датчика тангажа, пятый и шестой входы первого преобразователя, пятые входы второго и третьего преобразователей соединены с выходом четвертого умножителя, первый и второй входы четвертого преобразователя, второй вход второго преобразователя и первый вход пятого преобразователя соединены с выходом второго сумматора, третий и четвертый входы четвертого преобразователя, четвертый вход второго преобразователя и третий вход пятого преобразователя соединены с выходом одиннадцатого умножителя, пятый и шестой входы четвертого преобразователя, шестой вход второго преобразователя и пятый вход пятого преобразователя соединены с выходом первого сумматора, первый и второй входы шестого преобразователя, второй вход третьего преобразователя и второй вход пятого преобразователя соединены с выходом третьего сумматора, третий и четвертый входы шестого преобразователя, четвертый вход пятого преобразователя и четвертый вход третьего преобразователя соединены с выходом десятого умножителя через пятый инвертор, пятый и шестой входы шестого преобразователя, соединены с шестым входом третьего преобразователя, шестым входом пятого преобразователя и выходом четвертого сумматора, седьмые входы первого, четвертого, шестого преобразователей соединены с выходом задатчика постоянного сигнала, а выходы первого, второго, третьего, четвертого, пятого, шестого преобразователей, соответственно через первый, второй, третий, четвертый, пятый, шестой компараторы соединены со входами логической схемы ИЛИ, выход которой является выходом устройства.
Указанный технический результат достигается также тем, что в устройстве контроля датчиков системы ориентации подвижного объекта преобразователь содержит пятый сумматор, суммирующие входы которого соединены с выходами пятнадцатого, шестнадцатого, семнадцатого умножителей так, что входы последних образуют соответственно первый и второй, третий и четвертый, пятый и шестой входы преобразователя, седьмой вход которого является вычитающим входом сумматора, а выход -является выходом преобразователя.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата, достигаемого при осуществлении изобретения - способа и устройства контроля датчиков ориентации подвижного объекта. Технический результат достигается за счет измерения углов рыскания, тангажа, крена подвижного объекта в виде тригонометрических функций этих углов, запоминании значений величин и направлений этих углов, инвертировании углов по крену, тангажу, рысканию суммировании поворотов с последующим сравнением положения осей ортонормированной системы координат подвижного объекта с осями его исходного положения по величине и направлениям.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного способа и устройства контроля датчиков системы ориентации подвижного объекта отсутствуют, следовательно, заявленное изобретение соответствует условию „новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства - аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства - аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
исключении какой-либо части устройства - аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства - аналога или его части из известного материала для достижения технического результата обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставленнии таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует, изобретательскому уровню".
Сущность изобретения поясняется чертежами фиг. 1, фиг. 2, фиг. 3.
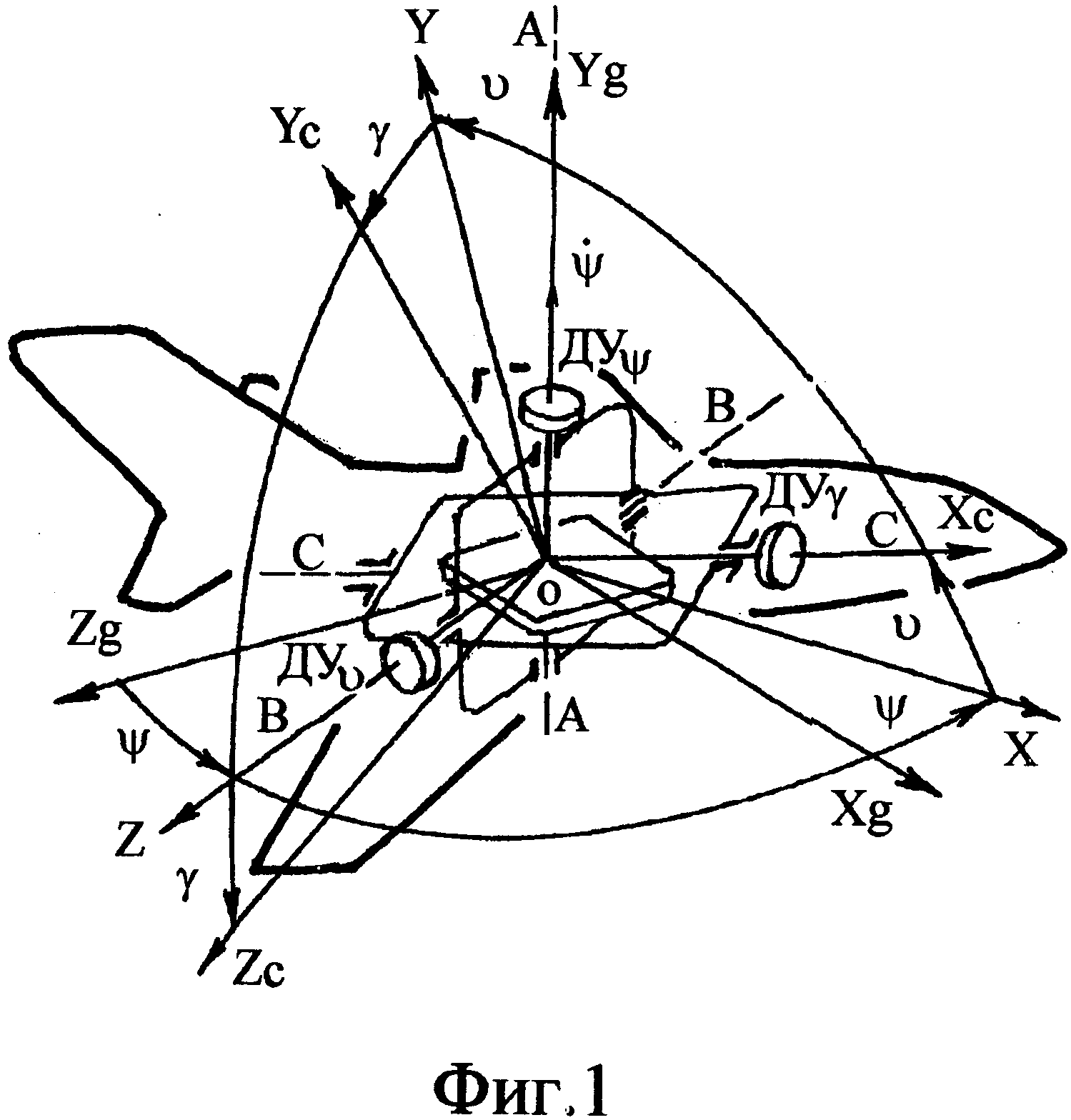
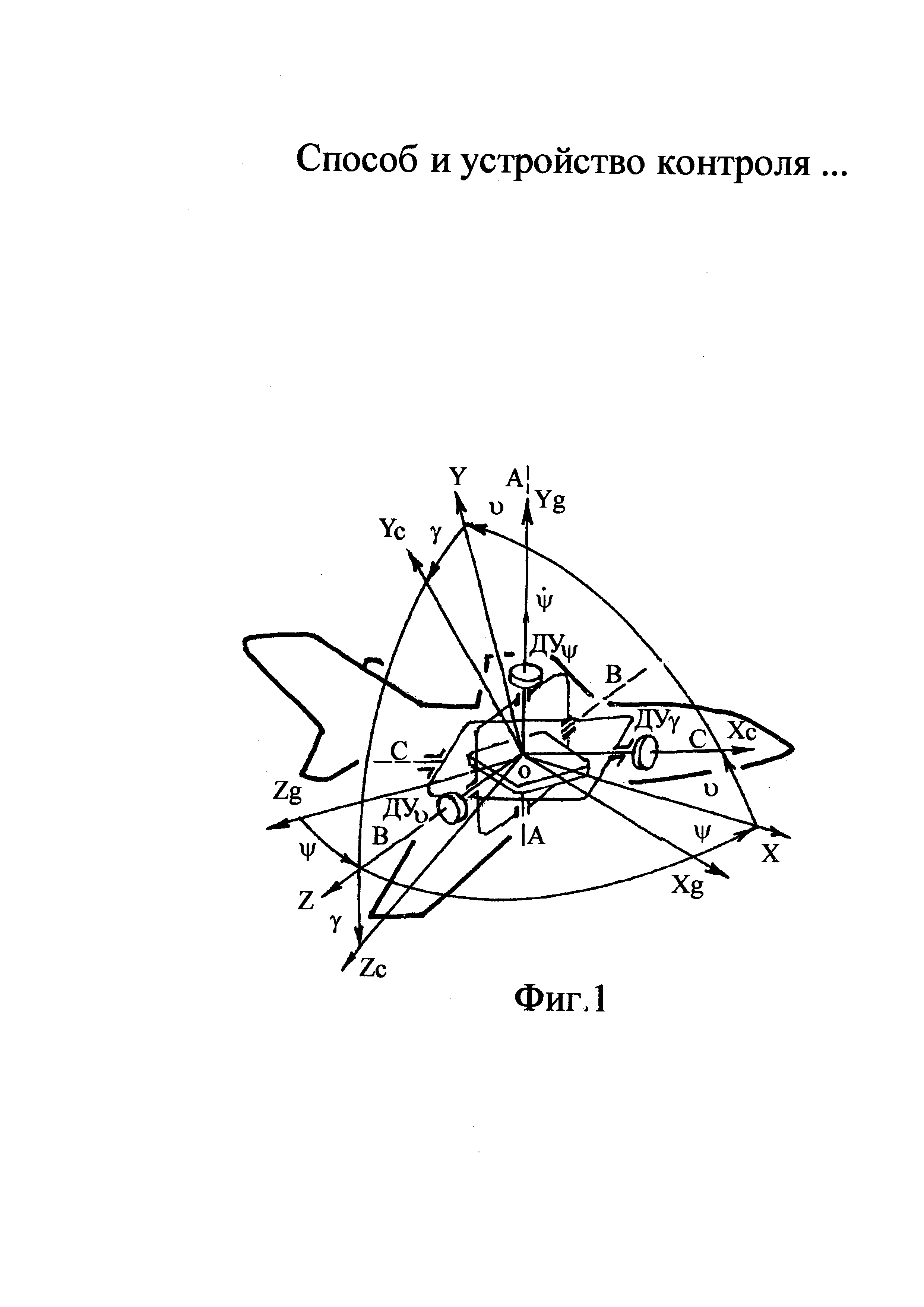
На фиг. 1 изображено положение систем координат платформы и углов поворота подвижного объекта - самолетная система:
OXgYgZg - неподвижная (земная) система координат платформы, ось OXg которой ориентирована по направлению полета, ось OYg - по вертикали места; ось OZg - в плоскости горизонта и перпендикулярно оси OXg; ортонормированный базис неподвижной системы координат;
OXcYcZc - связанная (самолетная) система координат, ось ОХс которой ориентирована по продольной оси подвижного объекта, OYc - по нормальной оси подвижного объекта, OZc - по поперечной оси подвижного объекта;
X, Y, Z - промежуточные оси преобразования систем координат;
АА - ось подвеса платформы;
ВВ - внутренняя ось подвеса платформы;
СС - наружная ось подвеса платформы;
ψ, υ, γ - углы рыскания, тангажа, крена подвижного объекта.
ДУψ, ДУυ, ДУγ - датчик рыскания, датчик тангажа, датчик крена - вращающиеся трансформаторы.
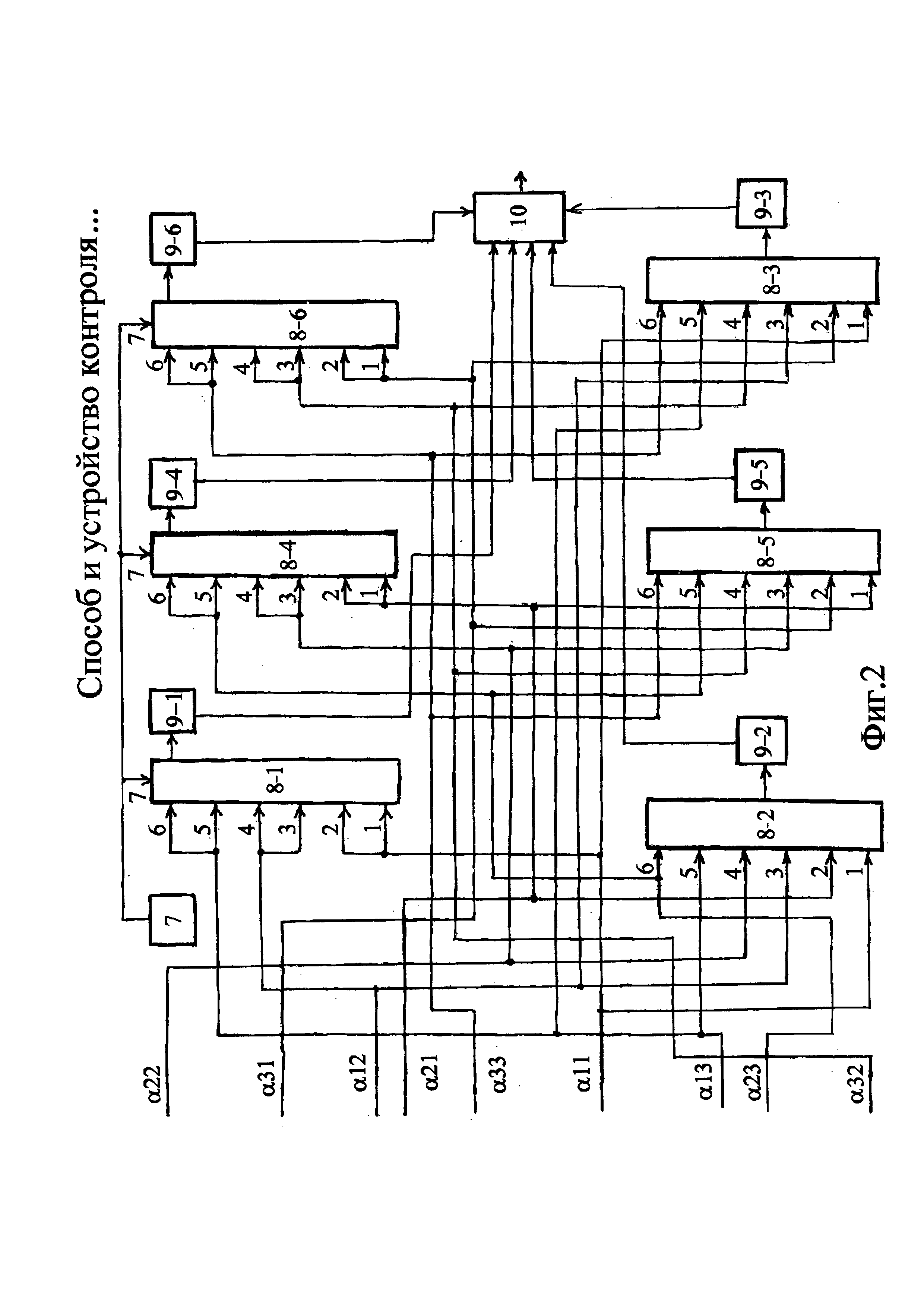
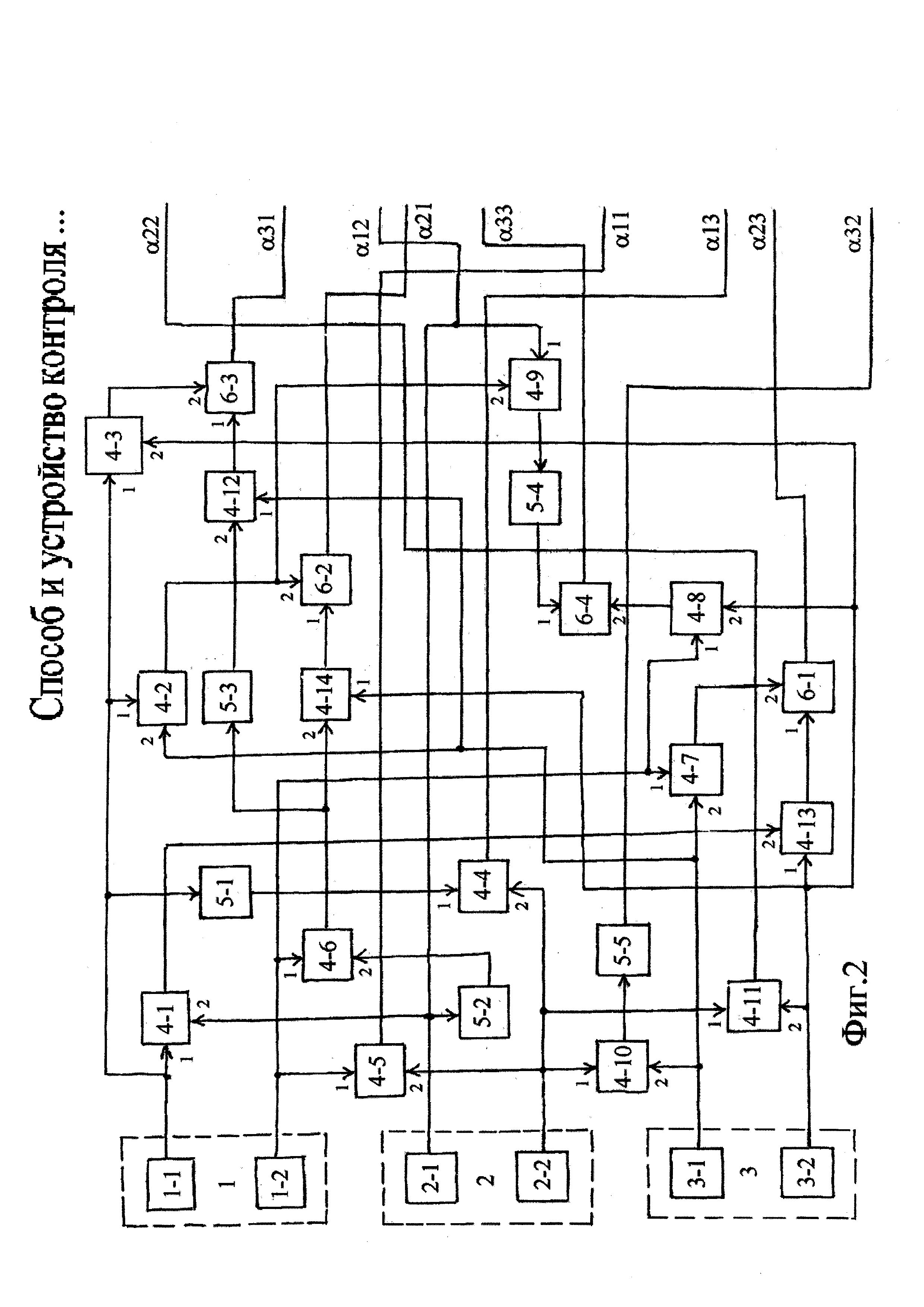
На фиг. 2 изображена структурная схема устройства контроля датчиков системы ориентации, где приняты следующие обозначения:
1 - датчик рыскания;
1-1 - синусный выход датчика рыскания;
1-2 - косинусный выход датчика рыскания;
2 - датчик тангажа;
2-1 - синусный выход датчика тангажа;
2-2 - косинусный выход датчика тангажа;
3 - датчик крена;
3-1 - синусный выход датчика крена;
3-2 - косинусный выход датчика крена;
4-1, 4-2, 4-3, 4-4, 4-5, 4-6, 4-7, 4-8, 4-9, 4-10, 4-11, 4-12, 4-13, 4-14 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый умножители;
5-1, 5-2, 5-3, 5-4, 5-5 - первый, второй, третий, четвертый, пятый инверторы;
6-1, 6-2, 6-3, 6-4 - первый, второй, третий, четвертый сумматоры;
7 - задатчик постоянного сигнала;
8-1, 8-2, 8-3, 8-4, 8-5, 8-6 - первый, второй, третий, четвертый, пятый, шестой преобразователь;
9- 1, 9-2, 9-3, 9-4, 9-5, 9-6 - компараторы;
10 - логическая схема ИЛИ.
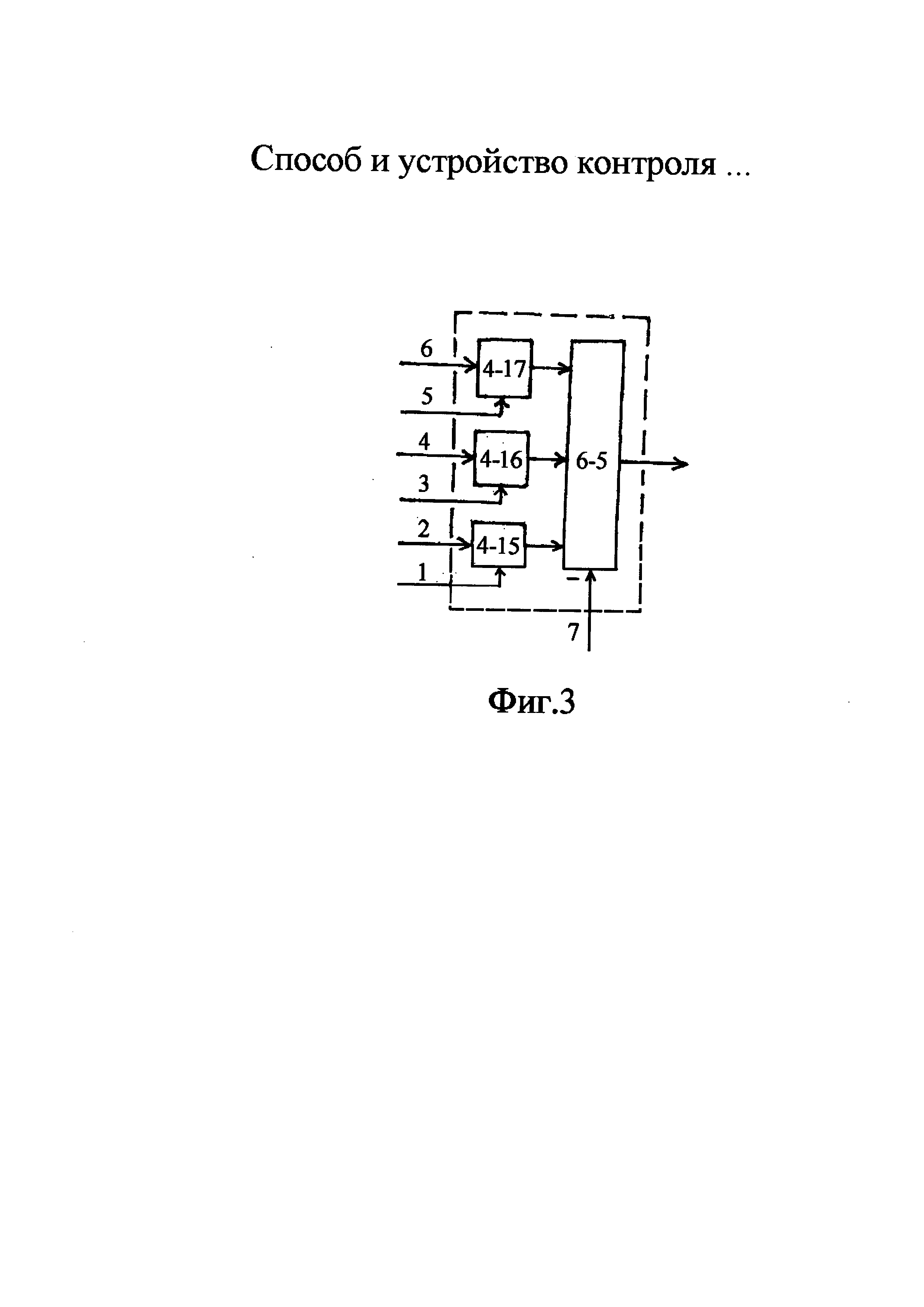
На фиг. 3 изображена структурная схема преобразователя 8-1, 8-2, 8-3, 8-4, 8-5, 8-6, где приняты следующие обозначения:
4-15, 4-16, 4-17 - пятнадцатый, шестнадцатый, семнадцатый умножители;
6-5 - пятый сумматор.
Сущность способа контроля датчиков системы ориентации подвижного объекта состоит в сравнении вычисленных величин и направлений ортов подвижной системы координат после поворота на углы тангажа, крена, рыскания. выраженных в тригонометрических функциях этих углов, вычисленных по сигналам датчиков углов после поворота на прямые и инвертированные значения и суммирования по результирующему положению связанной системы координат подвижного объекта, что можно представить в виде проверяемого тождества (15, с. 177-179; 16, с. 41). Применительно к рассмотренному перемещению можно записать (15, с. 159)


тогда
где 
- матрицы поворота ортонормированной связанной подвижной системы кооринат на углы рыскания, тангажа, крена подвижного объекта; α_γ, α_ϑ,α_ψ, матрицы поворота ортонормированной связанной подвижной системы координат на инвертированные значения этих углов; Е - единичная матрица. Выполнив матричные преобразования (3), получаем расчетные выражения для контроля датчиков ориентации подвижного объекта:














где UKi - выходной сигнал i-го компаратора; UO - дизъюнкция сигналов компараторов; Фi,  - функции точности контроля и пороги срабатывания компараторов, α11, …, α33 - элементы матрицы α⋅αТ направляющих косинусов.
- функции точности контроля и пороги срабатывания компараторов, α11, …, α33 - элементы матрицы α⋅αТ направляющих косинусов.
Способ контроля датчиков системы ориентации осуществляют следующим образом. Перед полетом, после выставки системы ориентации, или в полете, проводится измерение величин и направлений углов рыскания, тангажа, крена подвижного объекта, например самолета. Выполняется преобразование значений углов в тригонометрические функции синуса и косинуса. Необходимое преобразование ведутся с помощью штатных датчиков угла системы ориентации. В качестве системы ориентации здесь может рассматриваться гироплатформа в кардановом подвесе (фиг. 1), по осям которой установлены синусно-косинусные вращающиеся трансформаторы, или бесплатформенная инерциальная навигационная система, встроенный вычислитель которой программно определяет тригонометрические функции углов рыскания, тангажа, крена. Возможен контроль датчиков системы ориентации подвижного объекта, состоящей из отдельных измерителей с синусно-косинусными вращающимися трансформаторами, например типа курсовой системы ψ и гировертикали ϑ, γ. В процессе решения задачи контроля вычисляется матрица поворота α=αψαϑαγ и матрица инвертированных направлений и последовательности углов крена, тангажа, рыскания  Учитывая ортонормированный характер матриц определяются условия совпадения осей земной неподвижной системы координат OXgYgZg и подвижной системы координат OXcYcZc, как выполнение условий тождества (2) конечных поворотов. Элементы симметричной ортонормированной матрицы поворота будут представлены соотнесенными с единичной матрицей Е совпадения осей:
Учитывая ортонормированный характер матриц определяются условия совпадения осей земной неподвижной системы координат OXgYgZg и подвижной системы координат OXcYcZc, как выполнение условий тождества (2) конечных поворотов. Элементы симметричной ортонормированной матрицы поворота будут представлены соотнесенными с единичной матрицей Е совпадения осей:






При выполнении условий (18)-(23) отказов датчиков углов системы ориентации нет. Искажение поворотов отказом датчика угла нарушает выполнение одного или нескольких условий (18)-(23), что фиксируется компараторами, пороги срабатывания  которых настроены с учетом функций точности Фi (10)-(15). Определение функций точности Фi (10)-(15) ведется на идентичных преобразователях, содержащих сумматор, на входы которого поступают выходные сигналы aij
которых настроены с учетом функций точности Фi (10)-(15). Определение функций точности Фi (10)-(15) ведется на идентичных преобразователях, содержащих сумматор, на входы которого поступают выходные сигналы aij  трех умножителей элементов матрицы направляющих косинусов и задатчика постоянного сигнала.
трех умножителей элементов матрицы направляющих косинусов и задатчика постоянного сигнала.
Устройство контроля датчиков системы ориентации подвижного объекта (фиг. 2) содержит датчик 1 рыскания, включающий синусный выход 1-1 и косинусный выход 1-2. Датчик 2 тангажа включает синусный выход 2-1 и косинусный выход 2-2. Датчик 3 крена включает синусный выход 3-1 и косинусный выход 3-2. Синусный выход 1-1 датчика 1 рыскания соединен с первыми входами первого 4-1, второго 4-2, третьего 4-3 и, через первый инвертор 5-1, четвертого 4-4 умножителей. Косинусный выход датчика 1-2 рыскания соединен соединен с первыми входами пятого 4-5, шестого 4-6, седьмого 4-7, восьмого 4-8 умножителей. Синусный выход 2-1 датчика 2 тангажа соединен с вторым входом первого 4-1 умножителя, первым входом девятого 4-9 умножителя, а также, через второй 5-2 инвертор, со вторым входом шестого 4-6 умножителя. Косинусный выход 2-2 датчика 2 тангажа соединен с первыми входами десятого 4-10, одиннадцатого 4-11 умножителей, вторым входом четвертого 4-4 и пятого 4-5 умножителя. Синусный выход 3-1 датчика 3 крена соединен со вторыми входами второго 4-2, седьмого 4-7, десятого 4-10 и первым входом двенадцатого 4-12 умножителей. Косинусный выход 3-2 датчика 3 крена соединен со вторым входом третьего 4-3, одиннадцатого 4-11 и первыми входами двенадцатого 4-12, тринадцатого 4-13, четырнадцатого 4-14 умножителей. Выход первого 4-1 умножителя соединен со вторым входом тринадцатого 4-13 умножителя, выход которого соединен с первым входом первого 6-1 сумматора, второй вход которого соединен с выходом седьмого 4-7 умножителя. Выход шестого 4-6 умножителя соединен со вторым входом четырнадцатого 4-14 умножителя, выход которого соединен с первым входом второго 6-2 сумматора, второй вход которого, как и второй вход девятого 4-9 умножителя, соединен с выходом второго 4-2 умножителя. Выход шестого 4-6 умножителя, через третий 5-3 инвертор, соединен со вторым входом двенадцатого 4-12 умножителя, выход которого соединен с первым входом третьего 6-3 сумматора, второй вход которого соединен с выходом третьего 4-3 умножителя. Выход девятого 4-9 умножителя, через четвертый 5-4 инвертор, соединен с первым входом четвертого 6-4 сумматора, второй вход которого соединен с косинусным 3-2 выходом датчика 3 крена. Первый и второй входы первого 8-1 преобразователя, первый вход второго 8-2 и третьего 8-3 преобразователей соединен с выходом пятого 4-5 умножителя. Третий и четвертый входы первого 8-1 преобразователя, третьи входы второго 8-2 и третьего 8-3 преобразователей соединены с синусным выходом 2-1 датчика 2 тангажа. Пятый и шестой входы первого 8-1 преобразователя, пятые входы второго 8-2 и третьего 8-3 преобразователей соединены с выходом четвертого 4-4 умножителя. Первый и второй входы четвертого 8-4 преобразователя, второй вход второго 8-2 преобразователя и первый вход пятого 8-5 преобразователя соединены с выходом второго 6-2 сумматора. Третий и четвертый входы четвертого 8-4 преобразователя, четвертый вход второго 8-2 преобразователя и третий вход пятого 8-5 преобразователя соединены с выходом одиннадцатого 4-11 умножителя. Пятый и шестой входы четвертого 8-4 преобразователя, и пятый вход пятого 8-5 преобразователя соединены с выходом первого 6-1 сумматора.
Первый и второй входы шестого 8-6 преобразователя, второй вход третьего 8-3 преобразователя и второй вход пятого 8-5 преобразователя соединены с выходом третьего 6-3 сумматора. Третий и четвертый входы шестого 8-6 преобразователя, четвертый вход пятого 8-5 преобразователя и четвертый вход третьего 8-3 преобразователя соединены с выходом десятого 4-10 умножителя через пятый 5-5 инвертор. Пятый и шестой входы шестого 8-6 преобразователя соединены с шестым входом третьего 8-3 преобразователя, шестым входом пятого 8-5 преобразователя и выходом четвертого 6-4 сумматора. Седьмые входы первого 8-1, четвертого 8-4, шестого 8-6 преобразователей соединены с выходом задатчика 7 постоянного сигнала, а выход первого 8-1, второго 8-2, третьего 8-3, четвертого 8-4, пятого 8-5, шестого 8-6 преобразователей, соответственно через первый 9-1, второй 9-2, третий 9-3, четвертый 9-4, пятый 9-5, шестой 9-6 компараторы соединены со входами логической схемы 10 ИЛИ, выход которой является выходом устройства.
Преобразователь 8-1, 8-2, 8-3, 8-4, 8-5, 8-6 содержит пятый 6-5 сумматор так, что его суммирующие входы соединены с выходами пятнадцатого 4-15, шестнадцатого 4-16, семнадцатого 4-17 умножителей, при этом входы последних образуют соответственно первый и второй, третий и четвертый, пятый и шестой входы преобразователя 8-1, 8-2, 8-3, 8-4, 8-5, 8-6, а седьмой вход является вычитающим входом сумматора 6-5, выход сумматора 6-5 -является выходом преобразователя.
Практическая реализация способа и устройства контроля датчиков системы ориентации подвижного объекта возможна на аналоговой и цифровой схемотехнической базе (1, 17-20). В качестве контролируемых датчиков могут рассматриваться синусно-косинусные трансформаторы типа СКТД-6460ХХ, СКТ-220, СКТ-225ХХ, СКТД-6477, СКТ-265ХХ, СКТ-260ХХ и др., широко применяемые в системах ориентации и навигации ИКВ-802, ИКВ-1-8, ИКВ-72, И-21, 705, 802, Ц-050, Ц-060, 705-Х, И-42, ЛИНС-2000, БКВ-95 и др., в том числе на выходах бесплатформенных систем при алгоритмическом формировании в их вычислителях тригонометрических функций углов ориентации sinX и cosX (20, с. 119). Возможно применение устройства и для контроля датчиков комплексов определения курса ТКС-П2, КС-8, ГМК-7, МКС-1, Гребень, и вертикали МГВ-1÷4, АГБ-3К, СКВ, КС-8, АГБ-96÷98, … (6). Вычислитель устройства контроля целесообразно выполнять на ЦВМ 80 30301, БЦВМ 90-50ХХХ, БЦВМ 90-60, БАГЕТ-53 или интеллектуальном интерфейсе бортовых вычислительных сетей ТМК (21. с. 11; 22).
Устройство контроля датчиков системы ориентации подвижного объекта работает следующим образом. В процессе движения объекта имеет место отклонение связанной системы координат объекта относительно неподвижной (земной) системы координат на углы рыскания ψ, тангажа ϑ, крена γ. Для подвижного объекта типа самолет их измерение возможно с помощью гироплатформы (фиг. 1), по осям подвеса которой установлены датчик рыскания ДУψ, датчик тангажа ДУϑ, датчик крена ДУγ. Выполненные на синусно-косинусных трансформаторах они имеют по две обмотки, сигналы на выходах которых изменяются по sin и cos зависимостям углов поворота в осях подвеса платформы АА, ВВ, СС. На фиг. 2 показаны датчик 1 рыскания и его синусный 1-1 и косинусный 1-2 выходы, датчик 2 тангажа и его синусный 2-1 и косинусный 2-2 выходы, датчик 3 крена и его синусный 3-1 и косинусный 3-2 выходы. Сигнал, пропорциональный sinψ, с синусного 1-1 выхода датчика 1 рыскания поступает на первые входы первого 4-1, второго 4-2, третьего 4-3 и, через первый 5-1 инвертор, четвертого 4-4 умножителей. Сигнал, пропорциональный cosψ, с косинусного 1-2 выхода датчика 1 рыскания поступает на первые входы пятого 4-5, шестого 4-6, седьмого 4-7, восьмого 4-8 умножителей. Сигнал, пропорциональный sinϑ, с синусного 2-1 выхода датчика 2 тангажа поступает на второй вход первого 4-1 умножителя, первый вход девятого 4-9 умножителя, а также, через второй 5-2 инвертор, на второй вход шестого 4-6 умножителя. Сигнал, пропорциональный sinϑ, с синусного 2-1 выхода датчика 2 тангажа образует сигнал α12=sinϑ. Сигнал, пропорциональный cosϑ, с косинусного 2-2 выхода датчика 2 тангажа поступает на первые входы десятого 4-10, одиннадцатого 4-11 умножителей, второй вход четвертого 4-4 и пятого 4-5 умножителей. Инвертированный сигнал, пропорциональный -sinψ, с синусного 1-1 выхода датчика 1 рыскания образует на выходе четвертого 4-4 умножителя сигнал пропорциональный α13=-sinψcosϑ. На выходе пятого 4-5 умножителя получается сигнал пропорциональный α11=cosψcosϑ. Сигнал, пропорциональный sinγ, с синусного 3-1 выхода датчика 3 крена поступает на вторые входы второго 4-2, седьмого 4-7, десятого 4-10 и первые входы двенадцатого 4-12 умножителей. На выходе десятого 4-10 умножителя, после прохождения пятого 5-5 инвертора, получается сигнал пропорциональный α32=-sinγcosϑ. Сигнал, пропорциональный cosγ, с косинусного 3-2 выхода датчика 3 крена поступает на вторые входы третьего 4-3, восьмого 4-8, одиннадцатого 4-11 и первые входы тринадцатого 4-13, четырнадцатого 4-14 умножителей. На выходе одиннадцатого 4-11 умножителя получается сигнал пропорциональный α22=cosγcosϑ. Сигнал, пропорциональный sinϑsinψ, с выхода первого 4-1 умножителя поступает на второй вход тринадцатого 4-13 умножителя, выходной сигнал которого поступает на первый вход первого 6-1 сумматора, на второй вход которого поступает выходной сигнал седьмого 4-7 умножителя так, что на выходе первого 6-1 сумматора получается сигнал пропорциональный α23=cosψsinγ+sinψsinϑ cosγ, соответствующий выражению (6-3) в алгоритме контроля. Сигнал, пропорциональный -sinϑcosψ, с выхода шестого 4-6 умножителя поступает на второй вход четырнадцатого 4-14 умножителя, выходной сигнал которого поступает на первый вход второго 6-2 сумматора, на второй вход которого, как и на второй вход девятого 4-9 умножителя, поступает выходной сигнал второго 4-2 умножителя образуя сигнал α21=-cosψsinϑcosγ+sinψsinγ, пропорциональный соответствующий выражению (6-1) в алгоритме контроля. Сигнал, пропорциональный -sinϑcosψ, с выхода шестого 4-6 умножителя, через третий 5-3 инвертор, поступает на второй вход двенадцатого 4-12 умножителя, на первый вход которого поступает сигнал пропорциональный sinγ с датчика синуса 3-1 крена. Выходной сигнал двенадцатого 4-12 умножителя поступает на первый вход третьего 6-3 сумматора, на второй вход которого поступает сигнал с выхода третьего 4-3 умножителя образуя сигнал пропорциональный α31=cosψsinϑsinγ+sinψcosγ, соответствующий выражению (7-1) в алгоритме контроля. Сигнал, пропорциональный sinψsinϑsinγ, с выхода девятого 4-9 умножителя, через четвертый 5-4 инвертор, поступает на первый вход четвертого 6-4 сумматора, на второй вход которого поступает сигнал, пропорциональный cosψcosγ, с выхода восьмого 4-8 умножителя, на второй вход которого поступает выходной сигнал косинусного выхода cosγ датчика 3-2 крена. На выходе четвертого 6-4 сумматора формируется сигнал α33=cosψcosγ-sinψsinϑsinγ, пропорциональный соответствующий выражению (7-3) в алгоритме контроля. Сигнал с выхода пятого 4-5 умножителя, пропорциональный α11, поступает на первый, второй входы первого 8-1 преобразователя, первый вход второго 8-2 и третьего 8-3 преобразователей. Сигнал с выхода датчика 2-1 тангажа, пропорциональный α12, поступает на третий, четвертый входы первого 8-1 преобразователя, третьи входы второго 8-2 и третьего 8-3 преобразователей. Сигнал с выхода четвертого 4-4 умножителя, пропорциональный α13, поступает на пятый и шестой входы первого 8-1 преобразователя, пятые входы второго 8-2 и третьего 8-3 преобразователей. Сигнал с выхода второго 6-2 сумматора, пропорциональный α21, поступает на первый и второй входы четвертого 8-4 преобразователя, второй вход второго 8-2 преобразователя и первый вход пятого 8-5 преобразователя. Сигнал с выхода одиннадцатого 4-11 умножителя, пропорциональный α22, поступает на третий и четвертый входы четвертого 8-4 преобразователя, четвертый вход второго 8-2 преобразователя и третий вход пятого 8-5 преобразователя. Сигнал с выхода первого 6-1 сумматора, пропорциональный α23, поступает на пятый и шестой входы четвертого 8-4 преобразователя, шестой вход второго 8-2 преобразователя и пятый вход пятого 8-5 преобразователя. Сигнал с выхода третьего 6-3 сумматора, пропорциональный α31, поступает на первый и второй входы шестого 8-6 преобразователя, второй вход третьего 8-3 преобразователя и второй вход пятого 8-5 преобразователя. Сигнал с выхода десятого 4-10 умножителя, через пятый 5-5 инвертор, пропорциональный α32, поступает на третий и четвертый входы шестого 8-6 преобразователя, четвертый вход пятого 8-5 преобразователя и четвертый вход третьего 8-3 преобразователя. Сигнал с выхода четвертого 6-4 сумматора, пропорциональный α33, поступает на пятый и шестой входы шестого 8-6 преобразователя, шестой вход третьего 8-3 преобразователя, шестой вход пятого 8-5 преобразователя. Сигнал с выхода задатчика 7 постоянного сигнала, пропорциональный порогу срабатывания компараторов, поступает на седьмые входы первого 8-1, четвертого 8-4, шестого 8-6 преобразователей. Выходные сигналы первого 8-1, второго 8-2, третьего 8-3, четвертого 8-4, пятого 8-5, шестого 8-6 преобразователей, соответственно через первый 9-1, второй 9-2, третий 9-3, четвертый 9-4, пятый 9-5, шестой 9-6 компараторы поступают на входы логической схемы 10 ИЛИ, выходной сигнал которой является выходным сигналом устройства контроля.
Преобразователь 8-1÷6 по п. 3 формулы работает следующим образом. Реализуются соотношения вида

где Х1, Х2, Х3, Х4, Х5, Х6, Х7 - входные сигналы (Фиг. 3) преобразователя 8-1÷6; Фi - функции точности контроля. Входные сигналы Х1, Х2 поступают первый и второй входы пятнадцатого 4-15 умножителя, входные сигналы Х3, Х4 поступают на входы шестнадцатого 4-16 умножителя, входные сигналы Х5, Х6 поступают на входы семнадцатого 4-17 умножителя. Выходные сигналы пятнадцатого 4-15, шестнадцатого 4-16, семнадцатого 4-17 умножителей, как и вычитающий сигнал седьмого входа поступает на сумматор 6-5, выходной сигнал которого поступает на компараторы 9-1÷6. На выходе преобразователя 8-1 получается сигнал пропорциональный

На выходе преобразователя 8-4 получается сигнал пропорциональный

На выходе преобразователя 8-6 получается сигнал пропорциональный

На выходе преобразователя 8-2, при X7=0, получается сигнал пропорциональный

На выходе преобразователя 8-5, при X7=0, получается сигнал пропорциональный

На выходе преобразователя 8-3, при X7=0, получается сигнал пропорциональный

На выходах преобразователей получаются функции контроля Фi, которые, далее в компараторах 9-1÷3, сравниваются соответственно с пороговыми значениями  для каждого
для каждого 
Для контроля параметров синусно-косинусных вращающихся трансформаторов требуются весьма высокие точности измерения, что достигается применением чаще компенсационных методов и средств сравнения. В заявляемом устройстве используется информация о свойствах матрицы направляющих косинусов для оценки ортонормированных векторов связанной системы координат летательного аппарата. Линеаризация (18)-(23), с учетом класса точности СКТ-265, класс 0, 1, реальных систем ориентации, включенных в датчики угла [1], позволила определить погрешность контроля заявляемого устройства 3σα=0,5 угл. град, что в 4 раза лучше прототипа. Для контроля датчиков более высокого класса точности, например 0,005, результат будет выше. Достоверность контроля предлагаемой схемы интеллектуального интерфейса, когда ТИИ=60000 ч. ТАЦП=100000 ч. ТДУ=60000 ч. [19, 21, 23], получается РД=0,969517, ТД=64,6 ч., что лучше прототипа по времени достоверного контроля в 4,5 раза. В расчете учтено наличие аналого-цифровых преобразователей названных выше современных систем ориентации и навигации, содержащих диагностируемые датчики. Возможный дополнительный вес и габариты программной реализации безынерционной схемы контроля составляют либо 0,4 кг. 170*220*15,5 мм., либо определяются встроенной в систему ЦВМ 80-30301 или БЦВМ 386/486. Преимуществом заявляемого устройства является его инвариантность к изменению основных полетных параметров - рыскания, тангажа и крена, а работа только по нарушениям в синусно-косинусных вращающихся трансформаторах и последущих выходных цепях системы. Без включения в существующую структуру сложной, настроенной системы ориентации или навигации, только по анализу выходной информации, поступающей по сети потребителям летательного аппарата, дается сигнал отказа. Алгоритм контроля содержит простейшие арифметические, безынерционные операции, что обеспечивает высокое быстродействие контроля. В отличие от прототипа, где контроль одноканальный - для каждого датчика приближенно имеет место информационная производительность IП=0,121÷0,242, бит/с, для заявляемой устройства, контролирующего датчики одновременно трех каналов крена, рыскания, тангажа I=0,545 бит/с. Учитывая широкую унификацию датчиков угла и кодовую стандартизацию сигналов устройство может иметь переносную реализацию с возможностью подключения к различным системам ориентации и навигации на стационарном и полетном состоянии подвижного объекта.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:- средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в авиационной технике и, в частности, для комплексного контроля систем ориентации пилотажно-навигационных комплексов беспилотных, пассажирских и транспортных самолетов. Оно может использоваться для определения исправности самолета в полете и на стадии его предполетной проверки;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Баканов М.В., Лыска В.А., Алексеев В.В. Информационные микромашины следящих и счетно-решающих систем (вращающиеся трансформаторы, сельсины). М.: Сов. радио, 1977. С. 3, 49, 51, 52.
2. Беляевский Л.С., Новиков B.C., Олянюк П.В. Обработка и отображение радионавигационной информации. М.: Радио и связь, 1990. с. 114-119.
3. Богданченко Н.М. Курсовые системы и их эксплуатация. М.: Транспорт, 1983, С. 105, 63-64.
4. Руководство по технической эксплуатации самолета ИЛ-86. Под ред. С.В. Кузнецова. 2009.
5. Бородин В.Т., Рыльский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. М.: Машиностроение, 1978. с. 133.
6. Воробьев В.Г., Глухов В.В, Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. С. 290, 368, 375.
7. Морозов В.В., Баринова Т.В. Приборное оборудование самолета ИЛ-86 и его эксплуатация. Учебное пособие. Ульяновск: Центр ГА СЭВ, 1989.
8. Боднер В.А. Системы управления летательными аппаратами. М.: Машиностроение, 1973. 506 с.
9. Вульфов А. Широкофюзеляжные, "ИЛЫ" // Авиация и космонавтика, №1, 2 2002.
10. Кузовков Н.Т. Системы стабилизации летательных аппаратов. М.: Высшая школа,1976. с. 191-205.
11. Авиационная радионавигация: Справочник. Под ред. А.А. Сосновского. М.: Транспорт, 1990. с. 30-31.
12. Дмитриев С.П., Колесов Н.В., Осипов А.В. Информационная надежность, контроль и диагностика навигационных систем. СПб.: ГНЦ РФ - ЦНИИ Электроприбор, 2003. С. 111, 125, 128, 132 и др.
13. Авиационные цифровые системы контроля и управления. Под ред. В.А. Мясникова. Л.: Машиностроение, 1976. 608 с. С. 83, Рис. 3.4, 3.5.
14. Колодежный Л.П., Чернодаров А.В. Надежность и техническая диагностика. М.: Изд.ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина, 2010. 452 с.
15. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. М.: Машиностроние, 1976. 672 с.
16. Лурье А.И. Аналитическая механика. М.: Физматгиз, 1961. 824 с.
17. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / С.В. Якубовский, Н.А. Барканов, Л.И. Ниссельсон и др. / Под ред.С.В. Якубовского. М.: Радио и связь,1984 г., с. 432.
18. Гироскопические системы: Элементы гироскопических приборов: Под ред. Д.С. Пельпора. М.: Высшая школа, 1988. 432 с.
19. Каталог моментные электродвигатели и индукционные датчики угла для прецизионных электроприводов и цифровых безредукторных следящих систем. ФГУП ЦНИИ "Электроприбор", 2005.
20. Горелик А.Л., Бутко Г.И., Белоусов Ю.А. Бортовые цифровые вычислительные машины. М.: Машиностроение, 1975. 204 с.
21. Хвощ СТ., Никифоров Ю.Д., Осмоловский В.Н., Павлов С.С. Интеллектуальные интерфейсы бортовых вычислительных сетей // Мир авионики. №1, 2001. С. 10-12.
22. АВИОНИКА РОССИИ: Энциклопедический справочник. Научн. изд. / Под общей научной ред. С.Д. Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999. 780 с.
23. Аналого-цифровой преобразователь для преобразования сигналов тензодатчиков СИМ-А04.10 ТО и инстр. по экспл. СИМ-А04.10.000ТО. www.vcs-service.com ADC0410.doc
Способ построения единого информационного пространства и система для его осуществления
Способ определения параметров состояния почвенно-растительного покрова по данным многоспектрального аэрокосмического зондирования
Способ группового вождения дорожных дронов и система для его осуществления
Фильтр для очистки воды
Система автоматического управления дроном сопровождения водолаза
Устройство поперечного передвижения автомобиля
Способ автоматизированного проектирования производства и эксплуатации прикладного программного обеспечения и система для его осуществления
Последовательный преобразователь напряжение-код со ступенчатым пилообразным напряжением
Способ формирования гибридных фазоманипулированных сигналов посредством последовательной конкатенации радиоимпульсов
Декодер кода боуза-чоудхури-хоквингема с каноническим декодером хэмминга
Способ и устройство контроля инерциальной навигационной системы
Би-ротативный двигатель внутреннего сгорания с воздушным охлаждением
Устройство контроля инерциальной навигационной системы
Устройство комплексного контроля инерциальной системы
Способ контроля пилотажно-навигационного комплекса и устройство для его осуществления

