Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области измерения углов атаки и скольжения в полете летательного аппарата (ЛА) и может использоваться в системах индикации опасных ситуаций на самолете, а также в системах автоматического управления самолетом и беспилотными летательными аппаратами.
Известен способ определения углов атаки и скольжения с помощью многофункционального приемника воздушных давлений [1], в котором имеются специальные отверстия воздушных давлений для измерения углов атаки и скольжения. Недостатком этого способа является необходимость создания специального многоканального приемника воздушного давления для измерения углов атаки и скольжения. С точки зрения определения угла атаки такой приемник позволяет измерять только местный угол атаки, который может значительно отличаться от истинного угла атаки всего самолета. Местный угол атаки может быть неточным вследствие искажения потока воздуха в месте замера. Для уточнения значения величины истинного угла атаки необходимо измерять несколько местных углов атаки путем расположения приемников воздушного давления в различных местах крыла и/или фюзеляжа самолета, и по значениям воздушного давления этих приемников вычислять истинный угол атаки самолета. Кроме того, местный угол атаки сильно колеблется под воздействием вертикальных порывов ветра в условиях неспокойной атмосферы.
Известны серийно выпускаемые датчики аэродинамических углов: ДАУ-72, ДАУ-85-1, ДАУ-19-1. Это датчики флюгерного типа, которые в сочетании с датчиками-преобразователями угла поворота в электрическую величину и вычислителем позволяют определить местные углы атаки (скольжения). Такая система требует установки нескольких датчиков угла атаки и скольжения для вычисления истинных аэродинамических углов. Флюгерные датчики имеют динамические погрешности и требуют подогрева в случае опасности обледенения. Указанные свойства снижают надежность и точность определения аэродинамических углов.
Известна комплексная информационная система (КИС) [2], включающая в себя датчик воздушной скорости (ДВС), датчик угла атаки и скольжения (ДУ-АС), датчик угловой ориентации (ДУО) - курсовертикаль, датчик параметров движения (ДПД), блок оценивания скорости ветра (ОСВ), блок прогноза скорости ветра (ПСВ), блок обратного расчета вектора скорости (ОРВС), блок обратного перепроецирования вектора скорости (ОПВС). Такая система является сложным устройством, в работе которого используются много систем измерений: РСБН, ДИСС, СНС и другие. Также такая система дорого стоит.
Наиболее близким аналогом предлагаемого изобретения является «Способ определения углов атаки и скольжения при летных испытаниях гиперзвукового летательного аппарата» [3], в котором используют датчики воздушного давления, установленные на сферической поверхности носка летательного аппарата с заданными шагами в продольной и боковой плоскостях, трехстепенной датчик линейных ускорений и угловых скоростей (ТДУУС). Данное изобретение взято в качестве прототипа. Вычисление аэродинамических углов проводят двумя путями: 1) обработкой данных от измеренных параметров с датчиков воздушного давления, 2) с использованием известных кинематических соотношений:
 ,
,

где  ,
,  ,
,  - проекции вектора относительной скорости, полученные в результате интегрирования уравнений акселерометров и угловых скоростей, на оси измерительной системы координат oXиYиZи. В дальнейшем сравниваются значения углов атаки и скольжения, полученных обработкой данных, полученных с датчиков давления, с расчетными значениями αn и βn, При этом допустимые разности в значениях углов Δα и Δβ составляют 0,5°…1°. Недостатки первого способа те же, что и в описанном патенте США №4836019 [1], недостатком второго способа является факт того, что акселерометры измеряют как ускорения движения, т.е. инерционные, так и гравитационные, и, чтобы отделить эти ускорения для получения составляющих скоростей движения, требуются сложные вычисления, что приведет к запаздыванию и неточности вычисленных аэродинамических углов. Также неточными являются допустимые разности для принятия решения о правильности полученных значений аэродинамических углов.
- проекции вектора относительной скорости, полученные в результате интегрирования уравнений акселерометров и угловых скоростей, на оси измерительной системы координат oXиYиZи. В дальнейшем сравниваются значения углов атаки и скольжения, полученных обработкой данных, полученных с датчиков давления, с расчетными значениями αn и βn, При этом допустимые разности в значениях углов Δα и Δβ составляют 0,5°…1°. Недостатки первого способа те же, что и в описанном патенте США №4836019 [1], недостатком второго способа является факт того, что акселерометры измеряют как ускорения движения, т.е. инерционные, так и гравитационные, и, чтобы отделить эти ускорения для получения составляющих скоростей движения, требуются сложные вычисления, что приведет к запаздыванию и неточности вычисленных аэродинамических углов. Также неточными являются допустимые разности для принятия решения о правильности полученных значений аэродинамических углов.
В основу предлагаемого способа положен алгоритм косвенного определения углов атаки и скольжения без применения специального приемника воздушного давления, предназначенных для определения углов атаки и скольжения. Угол атаки определяется по типовым воздушным и инерциальным параметрам движения самолета. По параметрам этих систем определяется текущий коэффициент подъемной силы и далее угол атаки. При этом используется зависимость коэффициента подъемной силы от угла атаки при различных положениях закрылков и шасси, полученная аналитическим путем или продувкой в аэродинамической трубе. Для определения угла скольжения используются уравнения поперечной силы.
Техническим результатом является:
- повышение надежности контура безопасности за счет дополнительного метода измерения аэродинамических углов, особенно при полете в неспокойной атмосфере;
- при создании избыточных систем, позволяющих перейти к необслуживаемой технической эксплуатации в межрегламентный период, уменьшение числа первичных датчиков измерения давления;
Способ заключается в использовании параметров статического и динамического давлений, линейных ускорений, информации о конфигурации аэродинамики самолета - выпуска, уборки закрылков и шасси, веса самолета, линейного ускорения по трем осям.
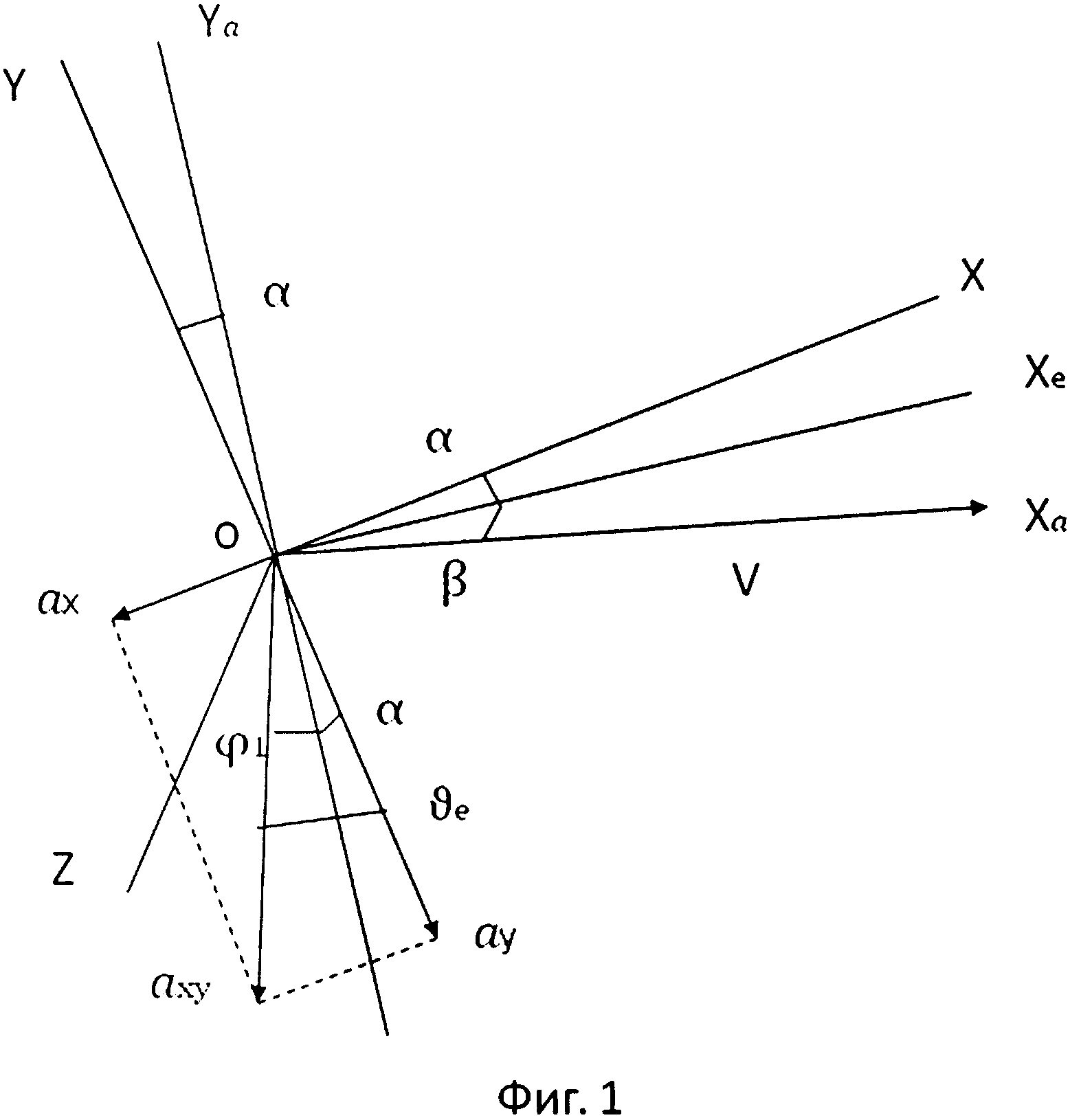
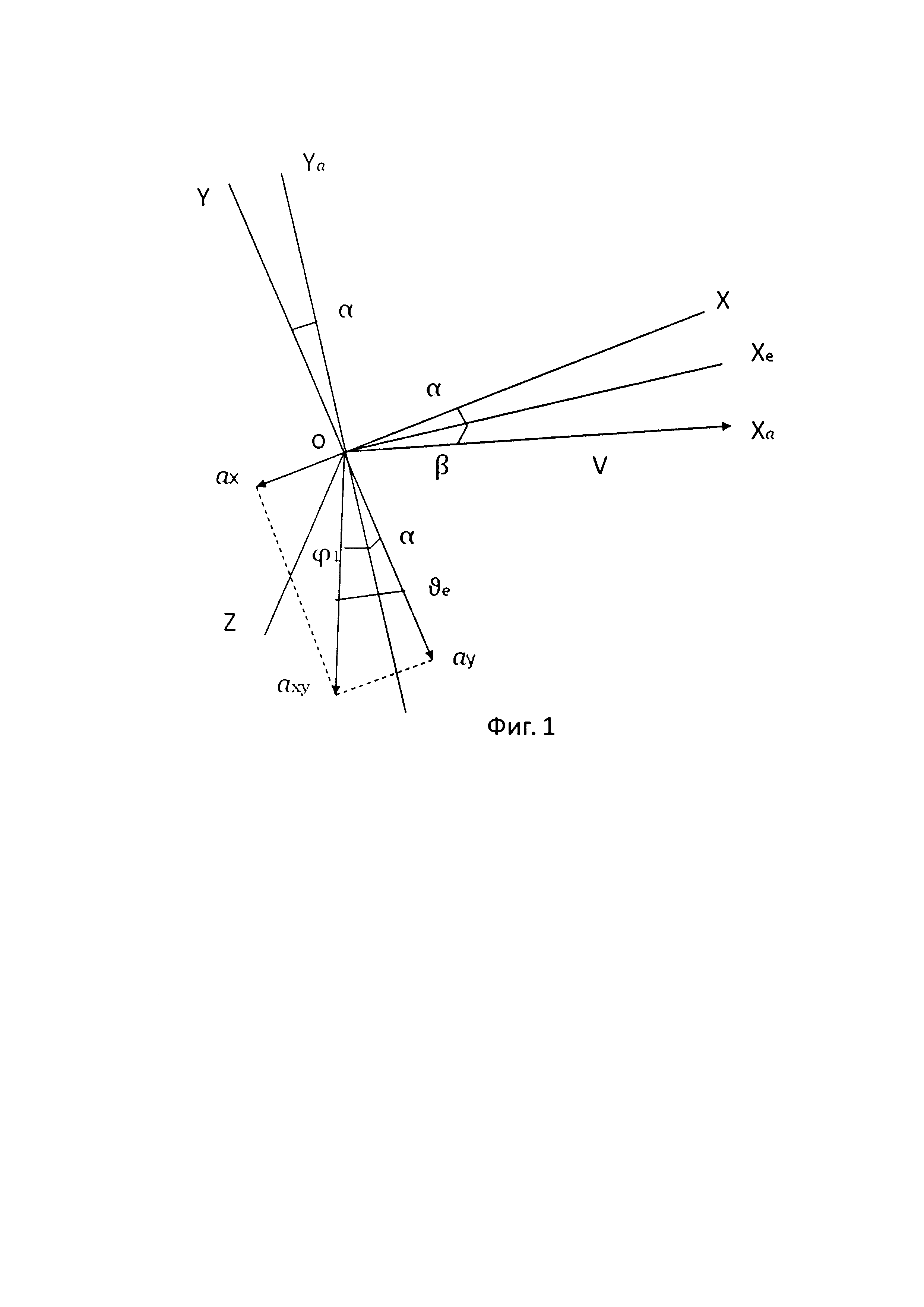
Для достижения названного технического результата в предлагаемом способе, включающем измерение статического и динамического давлений датчиками воздушных давлений, измерение скоростного напора воздуха, и измерения трех компонентов линейных ускорений с помощью акселерометров, установленных в связанной системе координат в центре тяжести летательного аппарата, вычисление аэродинамических углов производят в бортовой цифровой вычислительной машине с использованием упрощенной модели уравнений нормальных и поперечных сил, действующих на летательный аппарат, и аналитических и экспериментальных зависимостей коэффициента подъемной силы от угла атаки и коэффициента поперечной силы от угла скольжения. Определяют проекцию вектора ускорения на плоскость симметрии ЛА, определяют предварительное значение коэффициента подъемной силы и угла атаки, определяют угол ϕ1=ϑе-α1, где ϑе - угол между проекцией вектора ускорения на плоскость симметрии ЛА αху и компонентом вектора ускорения по оси OY aу, α1 - предварительное значение угла атаки. Определяют проекцию вектора ускорения на ось Ya скоростной системы координат, определяют скорректированное значение коэффициента подъемной силы и угла атаки, производят проверку точности вычислений путем сравнения коэффициентов подъемной силы и углов атаки на двух последовательных этапах коррекции до получения требуемого значения точности
Метод определения угла атаки
Предлагаемый метод применим для самолетов, на которых установлены акселерометры измерения линейных ускорений. Для реализации предлагаемого способа необходимы следующие устройства, которые используются в большинстве типов самолетов:
- приемник полного и статического давления, предназначенный для измерения этих параметров;
- акселерометр, измеряющий линейное ускорение по трем осям;
- измеритель, определяющий вес самолета.
Перечисленные устройства в системе измерений параметров самолета используются для определения барометрической высоты, воздушной скорости, линейного ускорения и т.д.
На фиг. 1 представлены: OXYZ - связанная система координат, OXaYaZa - скоростная система координат, ОХa - ось вектора воздушной скорости, ах и ау - проекции вектора ускорения а на оси ОХ и OY соответственно, α - угол атаки, β - угол скольжения, V - вектор воздушной скорости, ϑе - угол между проекцией вектора ускорения а на плоскость XOY аху и ау, ϕ1=ϑе-α.
Предлагаемый способ вычисления угла атаки сводится к определению угла атаки по зависимости угла атаки от коэффициента подъемной силы.
α=f(Сya),
где - Сya - коэффициент аэродинамической подъемной силы.
Эта зависимость может быть получена путем продувки модели самолета в аэродинамической трубе или аналитическим методом по конструктивным данным самолета [7, стр. с. 367-384]. Причем характер графика несколько отличается при различной конфигурации аэродинамики самолета: выпуск и уборка закрылков и шасси. Это учитывают при вычислениях угла атаки.
Известна следующая формула определения коэффициента подъемной силы [4, стр. 352]:

где
- q - скоростной напор,
- S - площадь крыла самолета,
- mg - вес самолета,
- Ya - подъемная сила.
Подъемная сила Ya определяется по следующей формуле:

- nya - нормальная скоростная перегрузка.
В формулу (1) входит параметр q - скоростной поток. Рассмотрим метод определения этого параметра. Скоростной поток определяется по следующей формуле (3), которую можно получить из известной формулы (4) [6, стр. 308]:
- 
- 
где
- q=ρ⋅V2/2,
- поправка ε≈M2/4+М4/40,
где М - число Маха.
Динамическое давление вычисляется из полного давления путем вычитания статического давления.
Рдин=Рп-Рст
Полное и статическое давления получаются из приемника воздушного давления с каналами статического и динамического давления.
В данной формуле нормальная скоростная перегрузка nya определяется как отношение составляющей результирующей силы Rya к весу mg ЛА [5, стр. 23]. Составляющая результирующей силы Rya определяется как проекция результирующей силы R на ось OYa скоростной системы координат [5, с. 18]. Результирующая сила R определяется как сумма векторов сил тяги Р и аэродинамической силы планера RA. [5, с. 17]. Имеются трудности в измерении проекций результирующей силы на борту ЛА.
Отличительной особенностью предлагаемого подхода является определение проекции силы, действующей в противоположном направлении по отношению к аэродинамической подъемной силе, в направлении оси OYa. Эта сила является суммой инерционных и гравитационных сил и определяется как
F=a⋅m,
где
- a - вектор ускорения ЛА как твердого тела,
- m - масса Л А.
В качестве чувствительного элемента, измеряющего составляющие вектора ускорения а, предлагается использовать трехстепенной акселерометр с направлением осей чувствительности по OX, OY, OZ связанной системы координат. Такие акселерометры обычно устанавливаются вблизи центра тяжести самолета. Современные акселерометры, например, типа МЭМС, чувствительны к ускорениям как инерционной, так и гравитационной природы.
Особенностью данного подхода также является использование специального алгоритма для определения составляющей аyа вектора ускорения по оси OYa. Исходные данные алгоритма определяются следующим образом.
Определяются силы, действующие на самолет, и их проекции на плоскость симметрии самолета и на связанные оси. Определяют следующие параметры полета:
- полное и статическое давление Рполн и Рст.,
- число М - Маха (для скоростных самолетов),
- ускорения по трем осям ax, ay, az.
По измеренной акселерометром величине ay, в связанной системе координат, определяется приближенное значение  .
.
Используем зависимости коэффициента подъемной силы от угла атаки (5), полученные в аэродинамической трубе для различных положений закрылков (взлетного, крейсерского, посадочного) или полученные расчетным путем [7, стр. с. 367-384]. Такие расчеты производятся, в частности, при проектировании ЛА.

Коэффициент подъемной силы в формуле (5) связан с подъемной силой Ya посредством соотношения (1). При этом, подъемная сила является составляющей на ось OYa вектора аэродинамической силы планера  в скоростной системе координат. Следовательно, составляющая вектора ускорение на ось OYa(aya) в скоростной системе координат связана с составляющими этого же вектора в связанной системе координат согласно таблице направляющих косинусов [5, стр. 43] через следующее соотношение:
в скоростной системе координат. Следовательно, составляющая вектора ускорение на ось OYa(aya) в скоростной системе координат связана с составляющими этого же вектора в связанной системе координат согласно таблице направляющих косинусов [5, стр. 43] через следующее соотношение:

Формула (6) справедлива, поскольку угол атаки α является углом между осями OYa и OY скоростной и связанной системам координат.
Соотношение (6) можно использовать для контроля правильности вычисления угла атаки. Оно содержит два неизвестных: aya - проекцию вектора ускорения а на ось Ya в скоростной системе координат и угол атаки α.
Алгоритм вычислений угла атаки представляется в следующей последовательности итераций:
1. Определяется текущее значение скоростного напора Рдин/(1+ε), где  .
.
2. Определяется проекция вектора а на плоскость симметрии самолета
 .
.
3. В плоскости OXY вычисляется угол ϑe=arctg(ax/ay), равный углу между осью OY и axy.
4. Определяется предварительное значение коэффициента подъемной силы

5. Определяется предварительное значение угла атаки α1=ƒ-1(Cy1) с учетом текущей конфигурации закрылок и шасси, влияющей на вид зависимости Су1 от угла атаки
6. Определяется предварительное значение угла ϕ1 как разность углов ϑе и α1: ϕ1=ϑe-α1.
7. Определяется проекция вектора αхy на ось Ya
 .
.
8. Подставив в формулу (4), вместо ay значение ⎥aa⎢, получаем скорректированное значение Cya1.
9. Определяется скорректированное значение угла атаки α2=ƒ-1(Cyα) по продувке самолета.
10. Определяется (Cya1-Сy)<δ, (α1-α2)<δ1, где δ и δ1 - малые числа. Если неравенства не удовлетворяются, то повторяются пп. 4-10 со значением α2 до выполнения неравенств. После чего переходят к п. 11.
11. Для дополнительной проверки правильности вычислений определяется значение проекции вектора а на ось OY
а y a =aycosαn+axsinαn,
где αn - значение угла атаки из п. 10
12. Выполняется проверка правильности расчета угла атаки сравнением (⎥aa⎢-aya)≤δ2 и формируется сообщение о правильности произведенных расчетов.
Метод определения угла скольжения
В предлагаемом способе определения угла скольжения используется зависимость поперечной силы от угла скольжения [4, стр. 177].

где
- Z - поперечная сила,
-  - коэффициент поперечной силы,
- коэффициент поперечной силы,
- β - угол скольжения.
Учитывая, что Z=azm (где az - проекция вектора ускорения на ось OZ) можно записать следующую формулу для определения угла скольжения β.

При этом коэффициент определяется по продувкам в аэродинамической трубе.
Скоростной поток q определяется по формуле (3).
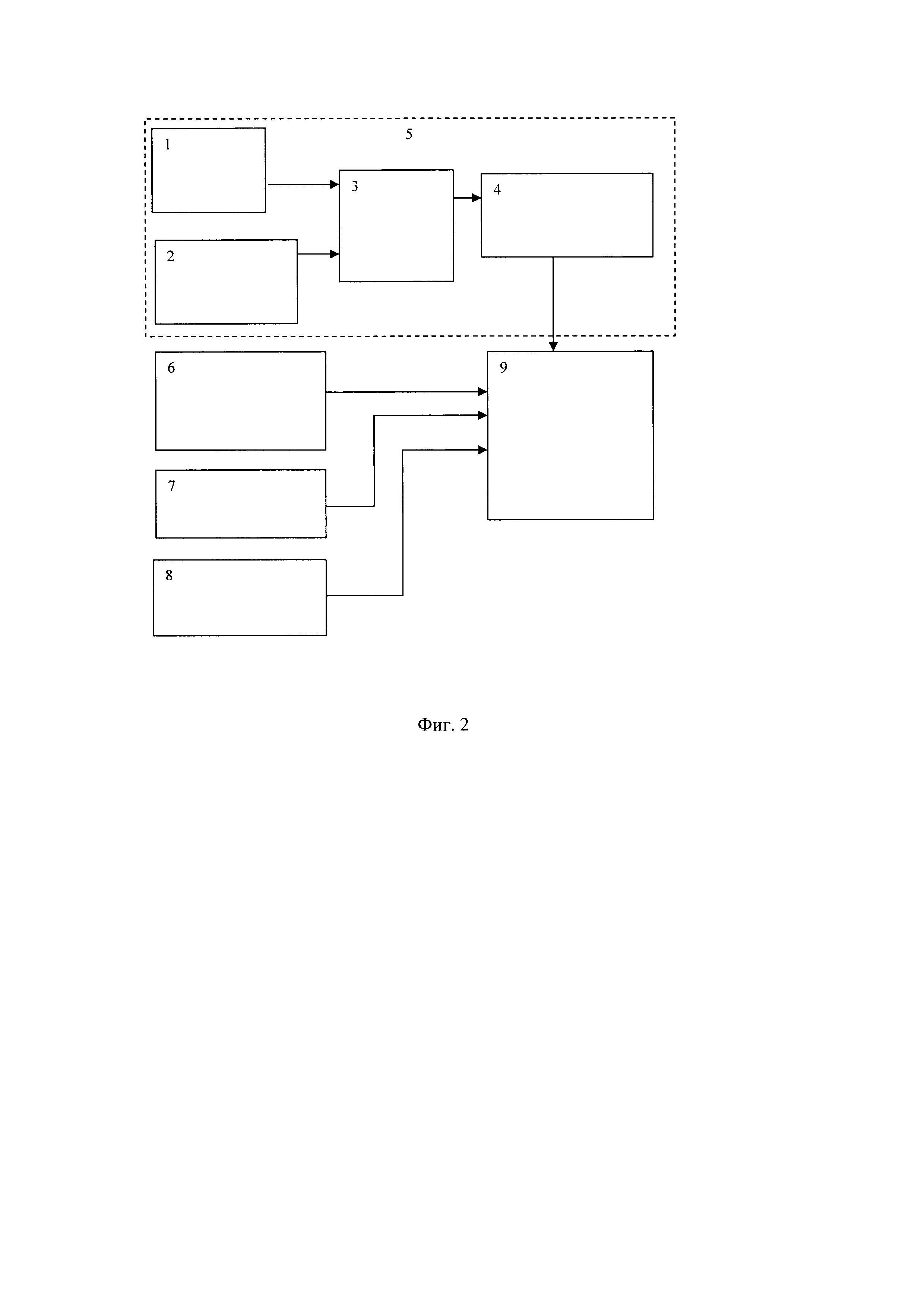
На фиг. 2 представлена структурная схема устройства измерения текущих углов атаки и скольжения, где
1 - приемник полного давления;
2 - приемник статического давления;
3 - датчик дифференциального давления;
4 - аналого-цифровой преобразователь (АЦП);
5 - система воздушных сигналов;
6 - трехстепнной датчик линейных ускорений (акселерометр);
7 - вычислитель веса самолета;
8 - устройство выдачи сигналов выпуска-уборки закрылков и шасси;
9 - бортовой вычислитель
Приемники полного 1 и статического 2 давлений, датчик дифференциального давления 3, и АЦП в случае скоростных самолетов объединены в системе воздушных сигналов 5. Система воздушных сигналов 5, акселерометр 6, вычислитель веса самолета 7 и устройство выдачи сигналов выпуска-уборки закрылков и шасси 8 соединены с помощью интерфейсом информационного обмена с бортовым вычислителем 9. Датчик дифференциального давления имеет аналоговый выход. Поэтому необходимо использовать аналого-цифровой преобразователь. Датчики линейных ускорений и угловых скоростей имеют цифровой выход и данные могут непосредственно подаваться в бортовой вычислитель определения углов атаки и скольжения. Интерфейсами могут быть I2C, SPI. Значение веса самолета вводится в бортовой вычислитель через вычислитель веса. В качестве датчиков дифференциального давления, угловых скоростей и линейных ускорений могут использоваться штатные самолетные приборы (системы). В этом случае выходными сигналами с датчиков могут быть CAN, ARINC-429. Устройство определения. Принцип работы устройства вычисления текущего значения углов атаки и скольжения раскрыт ранее в описании заявляемого способа.
Промышленная применимость
Изготовлен макетный образец устройства, включающего датчики измерения воздушных и инерциальных параметров, аналого-цифровой преобразователь и бортовой вычислитель, реализующего заявленный в изобретении способ. Наиболее успешно заявленные способ и устройство для его реализации промышленно применимы в системах мониторинга и косвенного вычисления аэродинамических углов летательного аппарата.
Источники информации
1. Патент США №4836019, М. кл. G01С 21/00 от 27.04.1989.
2. Патент РФ №2263280, М. кл. G01С 23/00 от 27.10.2005.
3. Патент РФ №2347193, М. кл. G01С 23/00, G01Р 5/00 от 20.02.2009.
4. Динамика полета / Под ред. A.M. Мхитаряна. М.: Машиностроение, 1978, 424 с.
5. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. Государственный стандарт Союза ССР ГОСТ 20058-80. - М.: Государственный комитет СССР по стандартам, 1981, 52 с.
6. Браславский Д.А., Логунов С.С., Пельпор Д.С. Расчет и конструкция авиационных приборов. - М.: Оборонгиз, 1954, 584 с.
7. Проектирование самолетов: Учебник для вузов / С.М. Егер, В.Ф. Мишин, Н.К. Лисейцев и др. / Под ред. С.М. Егера. - М: Машиностроение, 1983, 616 с.
Тензорезисторный датчик абсолютного давления на основе кни микроэлектромеханической системы
Устройство формирования пространственной информации
Способ автоматического управления неоднородной избыточностью комплекса оборудования и устройство для его реализации
Способ управления избыточностью бортовой интегрированной вычислительной среды и устройство для его реализации
Архитектура системы отказоустойчивой коммутации информации
Способ логического парного мониторинга неоднородных избыточных технических систем и устройство для его реализации
Адаптивный способ пассивной радиолокации
Устройство управления формированием видеоинформации и представлением в системе электронной индикации летательного аппарата
Устройство формирования пространственной информации
Способ определения угловых координат цели с помощью линейной антенной решетки
Способ определения азимута цели с помощью интерполированной пеленгационной характеристики
Способ и система определения координат цели в системе запрос-ответ
Способ пассивной радиолокации движущегося источника радиоизлучения
Архитектура системы отказоустойчивой коммутации информации

