Результат интеллектуальной деятельности: СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности к стыковочным устройствам космических аппаратов (КА), и может применяться для обеспечения сцепки, поглощения энергии относительного движения КА, стягивания и выравнивания стыковочных агрегатов.
Известен стыковочный механизм американского космического корабля «Аполлон», описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с., в котором устройства амортизации продольного, углового и бокового относительных движений КА, сгруппированные вокруг его продольной оси, объединены в одну общую кинематическую схему, что приводит к усложнению конструкции, ухудшению условий сцепки и невозможности автоматизации выполнения механического процесса стыковки.
Известен стыковочный механизм космического аппарата, описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984, сс. 149-180 (прототип), в котором устройства амортизации продольного, углового и бокового относительных движений КА, расположенные вокруг его продольной оси, разделены на две независимые группы. Это позволило значительно упростить кинематическую схему, улучшить условия сцепки и использовать управляемый привод для автоматизации выполнения отдельных этапов стыковки. Схема этого стыковочного механизма представлена на фиг. 1. Его основными элементами являются штанга 1 с винтовой поверхностью, головкой 2 и защелками 3, которая, входя в опорные подшипники 4, может поступательно перемещаться относительно подвижного корпуса 5, связанного в своей центральной части двухстепенным шарниром вращения 6 с основанием 7 механизма; размещенные внутри подвижного корпуса 5 шарико-винтовой преобразователь 8, осевой амортизатор 9, привод 10 и стопорная муфта 11, выравнивающие рычаги 12 с роликами 13 с траекторией движения, задаваемой кулачком 14 и обеспечивающей соосное положение стыковочного механизма и приемного конуса при стягивании стыковочных агрегатов; установленные на внешней поверхности корпуса 5 и образующие усеченный конус накладки 15 ограничения угловых движений космических аппаратов; установленный на конце подвижного корпуса 5 привод механизма защелок 16, обеспечивающий их установку в исходное положение перед стыковкой и втягивание внутрь головки после стыковки; боковой амортизатор 17 для демпфирования угловых движений подвижного корпуса 5 в шарнире 6 относительно основания 7 стыковочного механизма. Стыковочный механизм устанавливается на стыковочном агрегате активного (осуществляющего сближение) КА и при стыковке контактирует с приемным конусом стыковочного агрегата, который устанавливается на пассивном КА. Энергия продольного сближения активного КА рассеивается осевым амортизатором.
Элементами, демпфирующими энергию сближения активного КА в осевом амортизаторе 9, являются два вращательных электромеханических тормоза (ЭМТ) 18, спиральная пружина 19 с ограничителем углового хода 20, расположенная соосно с первым фрикционным тормозом 21. Вход спиральной пружины 19 и ограничителя углового хода 20 связан с шарико-винтовым преобразователем 8, а выход - со входом первого фрикционного тормоза 21, выход первого фрикционного тормоза 21 связан с приводом 10 стыковочного механизма через стопорную муфту 11.
Элементами бокового амортизатора 17 являются два поступательных пружинных механизма 22, соединяющие подвижный корпус 5 с основанием 7 стыковочного механизма, и две тяги 23, соединяющие подвижный корпус 5 с расположенными на основании 7 электромеханическими тормозами 24.
Угловые движения подвижного корпуса 5 в шарнире 6 относительно основания 7 возникают вследствие боковых отклонений штанги 1 при ее контакте с приемным конусом пассивного агрегата, а также при контакте накладок 15 с входной гранью приемного конуса. Поступательные пружины 22 и электромагнитные тормозы 24 с тягами 23 создают силы и моменты сил относительно шарнира 6, противодействующие такому движению и ограничивающие амплитуду угловых движений подвижного корпуса 5.
Необходимость модификации конструкции стыковочного механизма-прототипа обусловлена следующими ее недостатками.
Подвижный корпус совершает только угловые движения в шарнире относительно основания стыковочного механизма. Его положение и соответственно положение накладок 15 ограничения угловых движений зафиксировано относительно шарнира на максимальном удалении от головки штанги в ее исходном положении. Это обусловлено геометрией существующих разновидностей приемных конусов пассивных стыковочных агрегатов и обеспечивает после сцепки контакт накладок с входной гранью приемного конуса, ограничивающий угловые движения стыковочного механизма относительно пассивного агрегата. При стыковке к укороченному конусу накладки существующего подвижного корпуса оказываются вне его границ, не контактируют с его входной гранью и соответственно не выполняют функции ограничения угловых движений. Перемещение подвижного корпуса вперед, в новое фиксированное положение невозможно, так как новое фиксированное расстояние относительно шарнира стыковочного механизма не позволит выполнить стягивания агрегатов. Новое фиксированное положение подвижного корпуса 5 невозможно также потому, что оно определяет и новое положение относительно головки 2 штанги 1 выравнивающих рычагов 12 с роликами 13, в котором невозможно реализовать их движение по заданной фиксированной траектории, необходимой для выравнивания стыковочных агрегатов при их стягивании.
Техническим результатом предлагаемого изобретения является возможность ограничения угловых движений стыковочного механизма относительно пассивного агрегата при стыковке к пассивному агрегату с укороченным приемным конусом.
Технический результат достигается тем, что в стыковочном механизме, содержащем подвижный корпус, связанный с основанием стыковочного механизма двухстепенным вращательным шарниром и боковым амортизатором с поступательными пружинными механизмами, тягами и электромагнитными тормозами, штангу с головкой и защелками, которая установлена с возможностью поступательного перемещения относительно подвижного корпуса, размещенные в подвижном корпусе шарико-винтовой преобразователь, связанный с ним осевой амортизатор с первым фрикционным тормозом, электропривод, связанный с первым фрикционным тормозом через стопорную муфту, накладки ограничения угловых движений стыковочного механизма, расположенные равномерно с одинаковым угловым шагом и образующие усеченный конус, в отличие от прототипа, в осевой амортизатор введен второй фрикционный тормоз, соосный с первым фрикционным тормозом, связанный с ним и с шарико-винтовым преобразователем; двухстепенной вращательный шарнир установлен в основании подвижного корпуса, а поступательные пружинные механизмы и тяги электромагнитных тормозов бокового амортизатора направлены от основания стыковочного механизма внутрь усеченного конуса, образованного накладками ограничения угловых движений космических аппаратов, а также введен подвижный ограничитель угловых движений стыковочного механизма, установленный с возможностью поступательного перемещения в линейных подшипниках по поверхности подвижного корпуса вдоль его продольной оси и поджатый пружинами сжатия, при этом накладки ограничения угловых движений стыковочного механизма установлены на внешней боковой поверхности подвижного ограничителя угловых движений.
Сущность изобретения поясняется следующими чертежами:
фиг. 1 - схема стыковочного механизма-прототипа;
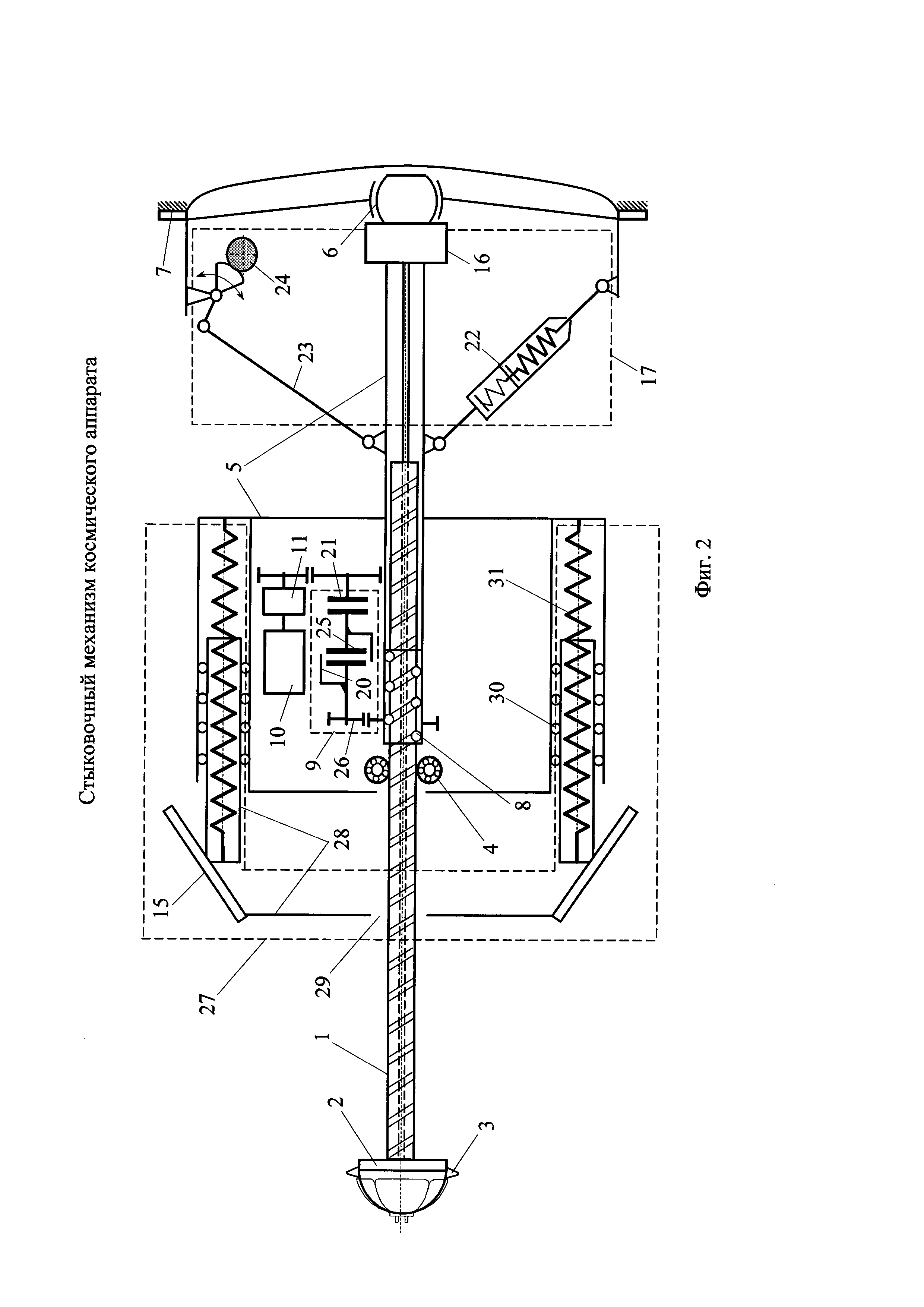
фиг. 2 - схема стыковочного механизма (предлагаемый);
фиг. 3 - ограничение относительных угловых движений при стыковке к пассивному агрегату с укороченным конусом;
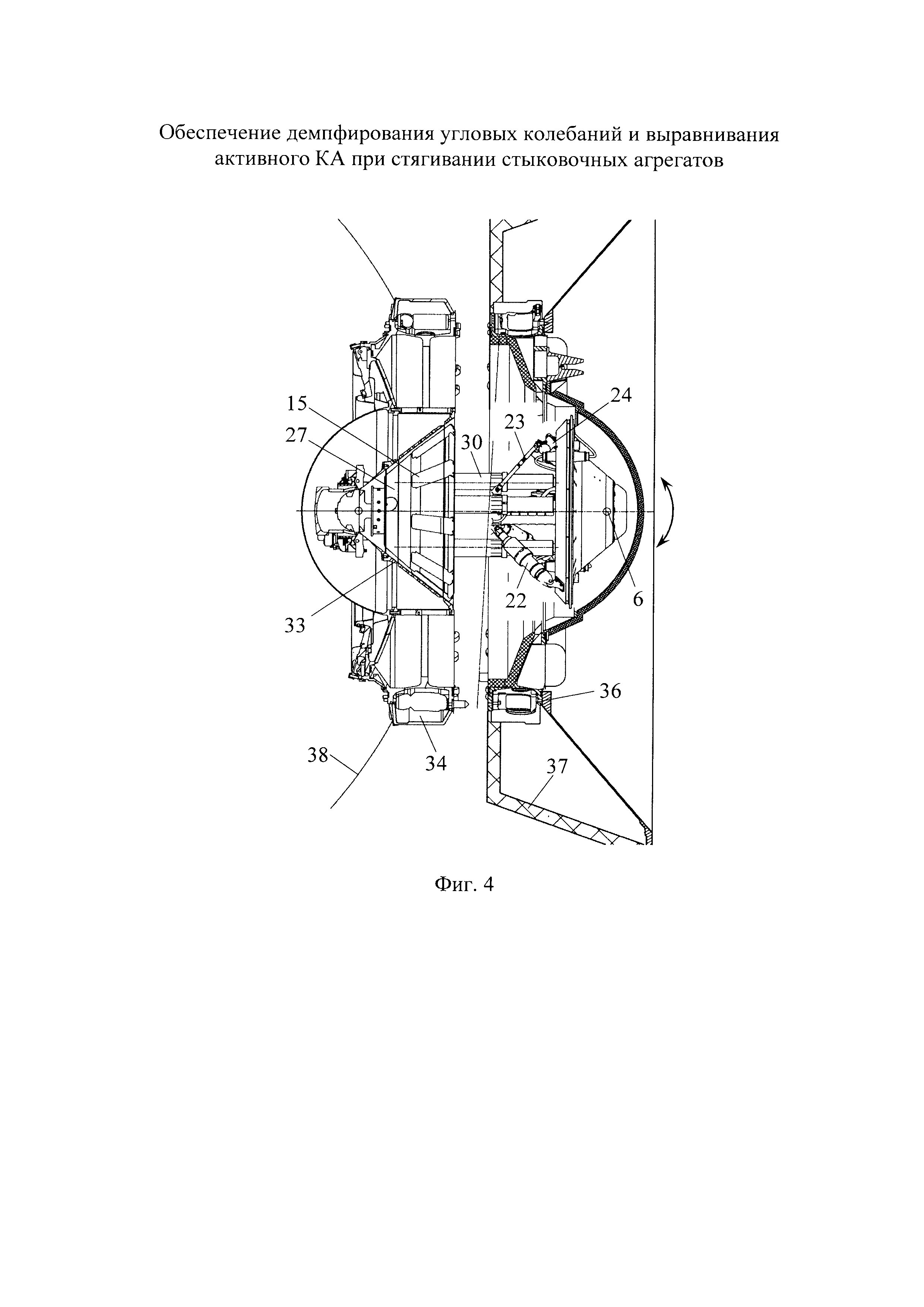
фиг. 4 - обеспечение демпфирования угловых колебаний и выравнивания активного КА при стягивании стыковочных агрегатов.
Основными элементами стыковочного механизма являются штанга 1 с винтовой поверхностью, головкой 2 и защелками 3, которая, входя в опорные подшипники 4, установлена с возможностью поступательного перемещения относительно подвижного корпуса 5, связанного двухстепенным шарниром вращения 6 с основанием 7 механизма; размещенные внутри подвижного корпуса 5 шарико-винтовой преобразователь 8, осевой амортизатор 9, привод 10 и стопорная муфта 11, выравнивающие рычаги 12 с роликами 13 с траекторией движения, задаваемой кулачком 14 и обеспечивающей соосное положение стыковочного механизма и приемного конуса при стягивании стыковочных агрегатов; установленные на внешней поверхности корпуса 5 накладки 15 ограничения угловых движений космических аппаратов; установленный на конце подвижного корпуса 5 привод механизма защелок 16, обеспечивающий их установку в исходное положение перед стыковкой и втягивание внутрь головки после стыковки; боковой амортизатор 17 для демпфирования угловых движений подвижного корпуса 5 в шарнире 6 относительно основания 7 стыковочного механизма. Стыковочный механизм устанавливается на стыковочном агрегате активного (осуществляющего сближение) КА и при стыковке контактирует с приемным конусом стыковочного агрегата, который устанавливается на пассивном КА. Энергия продольного сближения активного КА рассеивается в СтМ осевым амортизатором.
Основными элементами, демпфирующими энергию сближения активного КА в осевом амортизаторе 9, являются первый фрикционный тормоз 21 и установленный соосно и связанный с ним второй фрикционный тормоз 25 с ограничителем углового хода 20. Первый фрикционный тормоз 21 связан с приводом 10 стыковочного механизма через стопорную муфту 11, а второй - с шарико-винтовым преобразователем 8 через входную шестерню 26. Двухстепенной вращательный шарнир 6 расположен в основании подвижного корпуса 5, связывая его с основанием 7 стыковочного механизма. Основными элементами бокового амортизатора 17 являются два поступательных пружинных механизма 22, соединяющие подвижный корпус 5 с основанием 7 стыковочного механизма, и две тяги 23, соединяющие подвижный корпус 5 с расположенными на основании 7 электромеханическими тормозами 24. Оси поступательных пружинных механизмов 22 и тяг 23 разворачиваются по направлению от основания 7 внутрь усеченного конуса, образованного накладками 15, расположенными на боковой поверхности подвижного корпуса 5 стыковочного механизма.
Основными элементами подвижного ограничителя 27 угловых движений являются его корпус 28 с отверстием 29 в его передней торцевой части, через которое свободно проходит штанга 1, установленный на внешней поверхности подвижного корпуса 5 стыковочного механизма соосно с ним и с возможностью поступательного перемещения вдоль его продольной оси с помощью линейных подшипников 30, пружины сжатия 31, связывающие корпус 28 с задней торцевой поверхностью подвижного корпуса 5 стыковочного механизма, накладки 15 для ограничения угловых движений, расположенные равномерно с одинаковым угловым шагом на боковой поверхности корпуса 28 подвижного ограничителя 27 угловых движений и образующие усеченный конус. Головка 2 штанги 1 находится вне подвижного ограничителя 27, перед передней торцевой поверхностью корпуса 28 и имеет больший диаметр, чем отверстие 29.
В конечном положении стыковочного механизма головка штанги 1, проходящая через осевое отверстие 28 в передней торцевой поверхности корпуса 27, втянута внутрь подвижного корпуса 5, а головка 2 штанги, имеющая больший диаметр, упирается в переднюю торцевую поверхность корпуса 28 подвижного ограничителя 27, заставляя его также находиться в конечном втянутом положении относительно подвижного корпуса 5 с максимально сжатыми пружинами сжатия 31.
Функционирование СтМ начинается с выдвижения штанги 1 из конечного втянутого положения в переднее исходное положение перед стыковкой. Вращение вала привода 10 передается через стопорную муфту 11, осевой амортизатор 9 и его входную шестерню 26 на шарико-винтовой преобразователь 8, который преобразует его в поступательное движение штанги 1 по направлению от шарнира 6. При этом первый 21 и второй 25 фрикционные тормозы не срабатывают, так как их моменты сопротивления значительно больше, чем моменты трения в шарико-винтовом преобразователе 8 и передаче ко входной шестерне 26. Выдвижение штанги 1 и головки 2 вперед, то есть от шарнира 6, относительно подвижного корпуса 5 стыковочного механизма дает возможность такого же поступательного движения вперед корпусу 28 подвижного ограничителя 27 в линейных подшипниках 30 вдоль продольной оси и по боковой поверхности подвижного корпуса 5 стыковочного механизма под действием пружин сжатия 31. Максимальный ход пружин сжатия 31 меньше, чем максимальный ход штанги 1 относительно подвижного корпуса 5 стыковочного механизма. Поэтому головка 2 в исходном положении штанги 1 выдвинута вперед относительно внешней торцевой поверхности корпуса 28 в исходном положении подвижного ограничителя 27 и не касается ее.
Собственно стыковка начинается с первого удара головки 2 штанги 1 в приемный конус или приемное гнездо пассивного агрегата. При первом и последующих ударах штанга «просаживается», то есть уменьшается ее длина. Это поступательное движение шарико-винтовой преобразователь 8 преобразует во вращение входной шестерни 26 осевого амортизатора 9 в прямом направлении, то есть по часовой стрелке, которое передается второму фрикционному тормозу 25 с ограничителем углового хода 20. Пока ограничитель 20 углового хода не достиг своего упора, противодействие просадке штанги 1 и вращению шестерни 26 создает прямой момент сопротивления второго фрикционного тормоза 25. При повышенной, нештатной скорости активного КА и большой кинетической энергии его сближения ограничитель 20 углового хода выходит на свой упор и передает вращение от входной шестерни 26 на первый фрикционный тормоз 21, прямой момент сопротивления которого больше, чем у второго фрикционного тормоза 25. При обратных ударах защелок 3 в упоры приемного гнезда пассивного агрегата, вызванных освобождением потенциальной энергии деформации стыковочного механизма или пружин сжатия 31 подвижного ограничителя, штанга 2 начинает вытягиваться и это поступательное движение преобразуется, как было описано выше, во вращение входной шестерни 26 осевого амортизатора 9. Ему противодействует обратный момент сопротивления второго фрикционного тормоза 25. Величина этого обратного момента меньше, чем прямого, что определяет меньшую величину силы при обратном ударе и быстрое затухание осевых ударов.
При демпфировании энергии бокового и углового движения активного КА накладки 15 подвижного ограничителя 27 контактируют с входной гранью 32 укороченного приемного конуса 33 пассивного стыковочного агрегата 34. Контактная реакция 35 плавно нарастает вследствие того, что направление поступательных пружин 22 и тяг 23 электромагнитных тормозов 24 бокового амортизатора 17 согласовано с направлением ее действия. Она делает невозможным боковое движение относительно приемного конуса корпуса 28 подвижного ограничителя 27 и соответственно подвижного корпуса 5 стыковочного механизма. Вследствие этого активный стыковочный агрегат 36, на котором расположено основание 7 стыковочного механизма, совместно с активным космическим аппаратом 37 начинают вращаться в шарнире 6 относительно подвижного корпуса 5 стыковочного механизма и соответственно относительно пассивного стыковочного агрегата 34, установленного на пассивном космическом аппарате 38. При этом поступательные пружинные механизмы 22 и электромагнитные тормозы 24 с тягами 23 демпфируют энергию такого углового движения.
При стыковке на этапе стягивания активного и пассивного стыковочных агрегатов вращение вала привода 10 в обратном направлении передается через стопорную муфту 11 и осевой амортизатор 9 и его входную шестерню 26 на шарико-винтовой преобразователь 8, который преобразует его в поступательное движение штанги 1 и головки 2 по направлению к шарниру 6. На завершающей стадии стягивания стыковочных агрегатов защелки 3 прижимаются к упорам гнезда приемного конуса и оказывают сопротивление втягиванию штанги 1, создавая через шарико-винтовой преобразователь 8 соответствующий момент сопротивления, приложенный к входной шестерне 26 и превышающий обратный момент сопротивления второго фрикционного тормоза 25. В результате такого сопротивления и работы привода 10 ограничитель углового хода 20 приходит в свое исходное положение, он готов к следующей стыковке. После этого вращение от привода 10 через фрикционный тормоз 21 на входную шестерню 26 осевого амортизатора 9 передается непосредственно через упор ограничителя 20 углового хода, минуя второй фрикционный тормоз 25. При этом обратный момент сопротивления первого фрикционного тормоза 21 ограничивает величину силы, действующей на штангу 1 и соответственно на соединяемые активный и пассивный стыковочные агрегаты на заключительной стадии стягивания.
При втягивании штанги 1 на некоторую величину, определяемую ее предшествующей просадкой в процессе стыковки, задняя часть головки 2 начинает упираться в переднюю торцевую поверхность корпуса 28 подвижного ограничителя 27. Под действием силы втягивания, действующей на головку 2 штанги 1 и создаваемой приводом 10 через осевой амортизатор 9 и шарико-винтовой преобразователь 8, корпус 28 перемещается в линейных подшипниках 30 вдоль оси подвижного корпуса 5 по направлению к шарниру 6 и основанию 7 стыковочного механизма. При этом пружины сжатия 31 с нарастающей силой прижимают накладки 15 к поверхности приемного конуса 33, делая шарнир 6 неподвижным относительно пассивного агрегата 34 и пассивного КА 38. В этих условиях активный стыковочный агрегат 36 совместно с активным космическим аппаратом 37 могут вращаться только в шарнире 6 относительно пассивного стыковочного агрегата 34 и пассивного космического аппарата 38. Поступательные пружины 22 и электромагнитные тормозы 24 с тягами 23 демпфируют энергию этого вращения и окончательно выравнивают агрегаты перед их жестким соединением.
После завершения стыковки привод 10 втягивает штангу 1 в конечное положение. После того как головка 2, смещаясь по направлению к центру шарнира 6, начинает давить на переднюю торцевую часть корпуса 28, и штанга 1, и подвижный ограничитель 27 совместно движутся в конечное втянутое положение.
Благодаря возможности перемещения подвижного ограничителя 27 вдоль оси подвижного корпуса 5 стыковочный механизм может обеспечить стыковку к пассивным агрегатам с различными существующими в настоящее время модификациями приемных конусов при соответствующем согласовании осевого расстояния от основания 7 до стыковочной плоскости активного агрегата.
Литература
1. B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с.
Стыковочный механизм космического аппарата, содержащий подвижный корпус, связанный с основанием стыковочного механизма двухстепенным вращательным шарниром и боковым амортизатором с поступательными пружинными механизмами, тягами и электромагнитными тормозами, штангу с головкой и защелками, которая установлена с возможностью поступательного перемещения относительно подвижного корпуса, размещенные в подвижном корпусе шарико-винтовой преобразователь, связанный с ним осевой амортизатор с первым фрикционным тормозом, электропривод, связанный с первым фрикционным тормозом через стопорную муфту, накладки ограничения угловых движений стыковочного механизма, расположенные равномерно с одинаковым угловым шагом и образующие усеченный конус, отличающийся тем, что в осевой амортизатор введен второй фрикционный тормоз, соосный с первым фрикционным тормозом, связанный с ним и с шарико-винтовым преобразователем; двухстепенной вращательный шарнир установлен в основании подвижного корпуса, поступательные пружинные механизмы и тяги электромагнитных тормозов бокового амортизатора направлены от основания стыковочного механизма внутрь усеченного конуса, образуемого накладками ограничения угловых движений космических аппаратов, а также в него введен подвижный ограничитель угловых движений стыковочного механизма, установленный с возможностью поступательного перемещения в линейных подшипниках по поверхности подвижного корпуса вдоль его продольной оси и поджатый пружинами сжатия, при этом накладки ограничения угловых движений стыковочного механизма установлены на внешней боковой поверхности подвижного ограничителя угловых движений.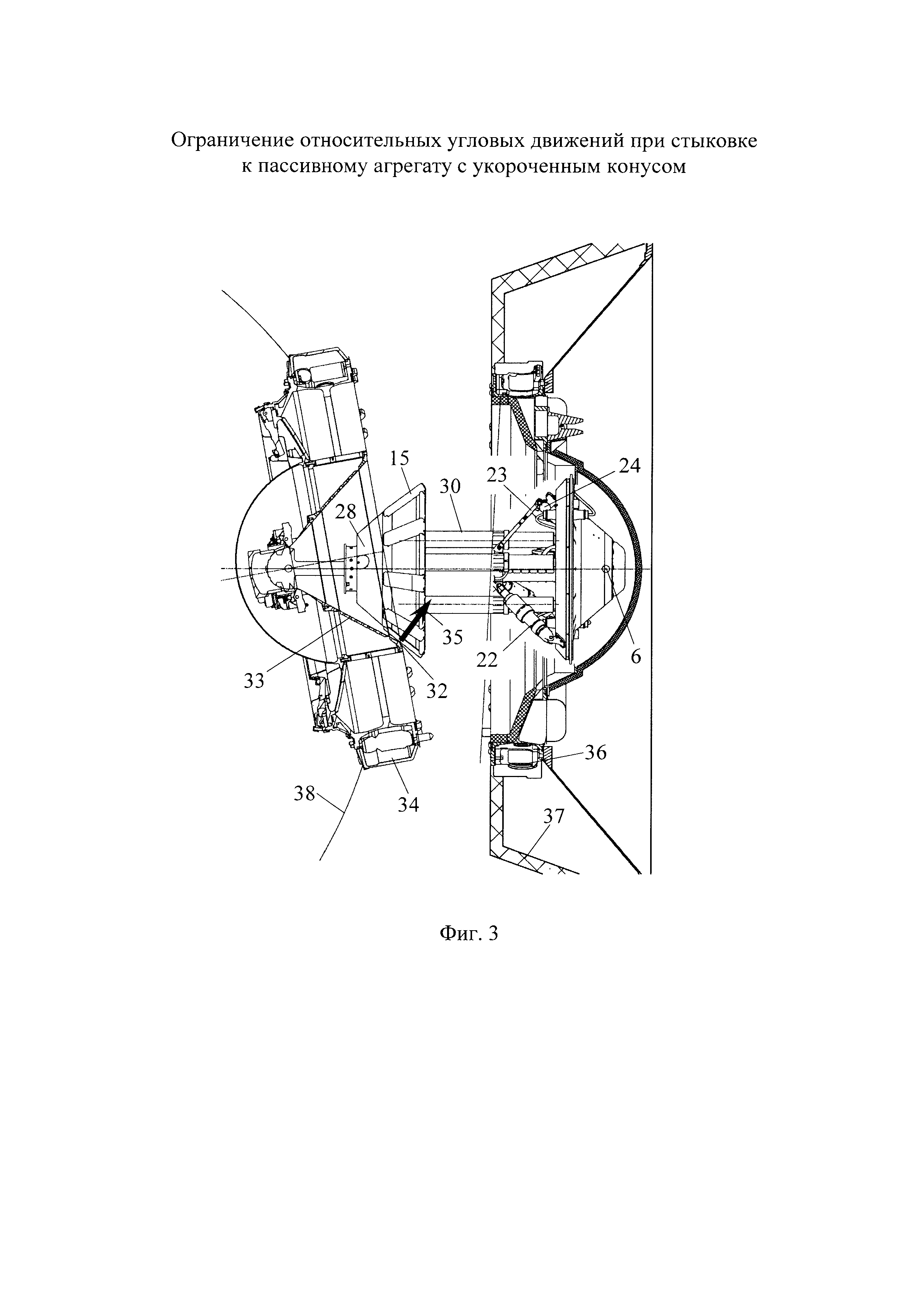


Устройство для разделения элементов конструкции
Адаптивный фильтр
Электропривод
Способ испытаний изделий на суммарную герметичность в вакуумной камере
Способ экспериментального определения динамических характеристик гибких протяженных конструкций
Способ предпусковой инерционной сепарации в невесомости газовых включений в жидком компоненте топлива орбитального блока (варианты)
Магнитоплазменный электрореактивный двигатель
Бортовая экспериментально-испытательная установка и способ её эксплуатации
Система обеспечения внекабинной деятельности космонавтов-операторов и способ её эксплуатации
Стенд для тепловакуумных испытаний элементов космических аппаратов
Стыковочный механизм космического аппарата
Планетарный редуктор
Телескопическое стреловое устройство

