Результат интеллектуальной деятельности: ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ
Вид РИД
Изобретение
Изобретение относится к тренажерам для обучения механика-водителя гусеничной машины.
Известны тренажеры для обучения механика-водителя гусеничной машины, обеспечивающие формирование необходимых первичных навыков вождения.
Из изученных аналогов в качестве прототипа к предлагаемому изобретению взят тренажер для обучения механика-водителя бронированной гусеничной машины (см. патент №2155991, бюл. №25 от 10.09.2000), который принят в качестве прототипа.
Тренажер для обучения механика-водителя бронированной гусеничной машины, который взят в качестве прототипа, содержит блок имитации визуальной обстановки, выходы которого соединены с блоком моделирования динамики движения и первым входом пульта управления инструктора, второй вход которого соединен с выходом блока моделирования динамики движения, подключенного вторым выходом к электрогидроприводу колебательного движения кабины.
Недостатком данного тренажера является низкая возможность формирования у обучаемого навыка вождения гусеничной машины по неровностям маршрута при движении с высокой скоростью и не обеспечиваются благоприятные условия для стрельбы из вооружения гусеничной машины.
Управляя движением гусеничной машины по неровной, пересеченной местности, механик-водитель должен выбрать такой режим движения, чтобы колебания корпуса были минимальны, и при этом достигалась необходимая точность стрельбы. Кроме того, известно, что колебания при движении гусеничной машины, сопровождающиеся большими резонансные колебаниями корпуса машины, возникают на скоростях движения 28-36 км/ч. Поэтому методика обучения вождению механиков-водителей предусматривает привитие навыков в преодолении резонансного режима движения по неровностям, которое представляет для них определенную психологическую и физическую нагрузки.
В практике обучения вождению гусеничной машины плавность хода, являясь важнейшим показателем обученности и оценивается по величине вертикальных ускорений вызываемых ими перегрузок, измеряемых на месте расположения механика-водителя.
Исследования показали, что плавность хода движения гусеничной машины зависит от уровня классной квалификации механика-водителя и характеризуется спектральной характеристикой вертикальных ускорений корпуса машины. Так, например, механики-водители, имеющие классную квалификацию специалиста первого класса, двигаясь по неровностям с более высокой скоростью, допускают на 1 км пути максимально возможные безопасные перегрузки порядка 2-3g в среднем 6-8 раз, а опытные - 1-2 раза. Излишне «мягкая» для гусеничной машины плавность хода вовсе не является достоинством, поскольку это непременно ведет к снижению средней скорости движения.
Жесткие удары, сопровождающиеся перегрузками свыше 3g на месте механика-водителя, вызывают быстрое утомление, а в некоторых случаях приводят и к травмам. У специалиста, имеющего классную квалификацию специалиста более высокого класса - почти не наблюдается выше указанных недостатков, тогда как недостаточно опытные механики-водители не выдерживают опасные перегрузки, снижая при этом скорость движения гусеничной машины.
Таким образом, плавность хода гусеничных машин можно считать достаточной, если количество случаев перегрузок в диапазоне 2-3g соответствует числу препятствий вертикального типа на маршруте и нет жестких ударов гусеничной машины, при которых вертикальные ускорения превышают 3g.
Указанные недостатки не позволяют полностью реализовать высокие скоростные свойства систем подрессоривания, заложенные в современных гусеничных машинах, что позволяет вести поиск более совершенных тренажеров для обучения механиков-водителей гусеничных машин.
Задачей предлагаемого изобретения является расширение функциональных возможностей тренажера для обучения механика-водителя гусеничной машины и повышение качества его подготовки за счет формирования навыка вождения с высокой скоростью по плавности хода.
Для выполнения поставленной задачи предлагается тренажер для обучения механика-водителя гусеничной машины, содержащий блок имитации визуальной обстановки, выходы которого соединены с блоком моделирования динамики движения и первым входом пульта управления инструктора, второй вход которого соединен с выходом блока моделирования динамики движения, подключенного вторым выходом к электрогидроприводу колебательного движения кабины, отличающийся тем, что в него дополнительно введены блок датчиков вертикальных ускорений, последовательно соединенные с пультом управления инструктора, схема установки уровня ударной перегрузки, блок компараторов превышения уровня ударной перегрузки второй вход которого соединен с выходом блока датчиков вертикальных ускорений, усилитель, одновибратор, эмиттерный повторитель и схема световой индикации, размещенная в смотровом приборе механика-водителя, последовательно соединенные задатчик оценочных показателей качества управления, блок сравнения и индикатор оценки, выход которого соединен с первым входом пульта управления инструктора, последовательно соединенные счетчик превышения предельных ускорений, первый вход которого соединен с вторым выходом одновибратора и цифровой индикатор, выход которого соединен с четвертым входом пульта управления инструктора, блок формирования сигнала на автоматический сброс индикации, выход которого соединен с вторым входом счетчика превышения предельного ускорения, а вход соединен с пультом управления инструктора, последовательно соединенные сумматор, вход которого соединен с выходом счетчика превышения предельного ускорения, блок разрешения передачи сигнала, управляющий вход которого соединен с другим выходом пульта управления, и блок деления, второй вход которого соединен с третьим выходом пульта управления инструктора, а выход соединен с другим входом блока сравнения.
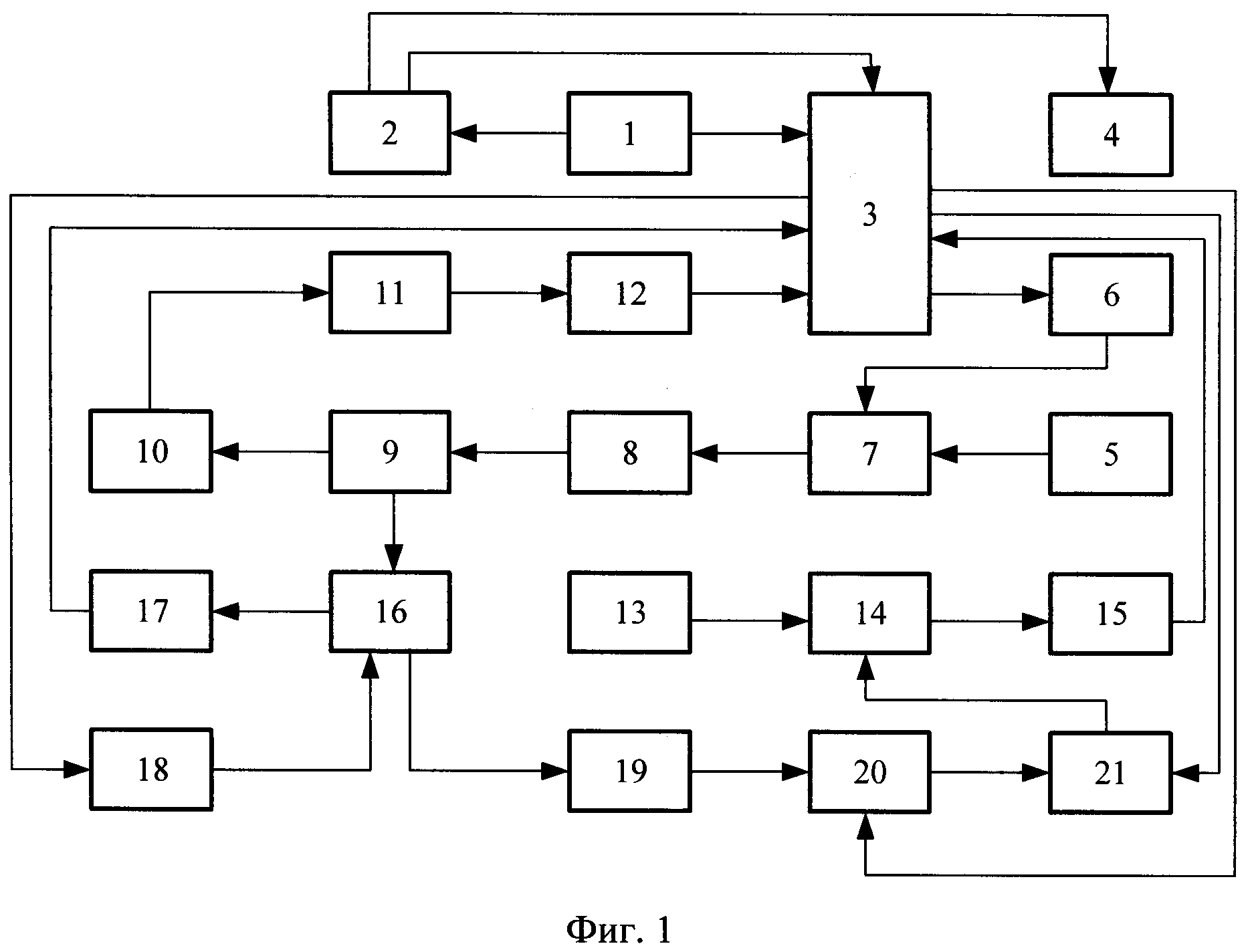
На фиг. 1 показана функциональная схема предлагаемого тренажера для обучения механика-водителя гусеничной машины.
Тренажер для обучения механика-водителя гусеничной машины содержит блок 1 имитации визуальной обстановки, выходы которого соединены с блоком 2 моделирования динамики движения и первым входом пульта 3 управления инструктора, второй вход которого соединен с выходом блока моделирования динамики движения, подключенного вторым выходом к электрогидроприводу 4 колебательного движения кабины, блок 5 датчиков вертикальных ускорений, последовательно соединенные с пультом управления инструктора, схема 6 установки уровня ударной перегрузки, блок 7 компараторов превышения уровня ударной перегрузки, второй вход которого соединен с выходом блока датчиков вертикальных ускорений, усилитель 8, одновибратор 9, эмиттерный повторитель 10 и схема 11 световой индикации, размещенная в смотровом приборе механика-водителя 12, последовательно соединенные задатчик 13 оценочных показателей качества управления, блок 14 сравнения и индикатор 15 оценки, выход которого соединен с первым входом пульта управления инструктора, последовательно соединенные счетчик 16 превышения предельных ускорений, первый вход которого соединен с вторым выходом одновибратора и цифровой индикатор 17, выход которого соединен с четвертым входом пульта управления инструктора, блок 18 формирования сигнала на автоматический сброс индикации, выход которого соединен с вторым входом счетчика превышения предельного ускорения, а вход соединен с пультом управления инструктора, последовательно соединенные сумматор 19, вход которого соединен с выходом счетчика превышения предельного ускорения, блок 20 разрешения передачи сигнала, управляющий вход которого соединен с другим выходом пульта управления, и блок 21 деления, второй вход которого соединен с третьим выходом пульта управления инструктора, а выход соединен с другим входом блока сравнения.
Тренажер для обучения механика-водителя гусеничной машины работает следующим образом.
Перед началом выполнения упражнения инструктор обучения устанавливает в задатчик 13 оценочных показателей качества управления значения вертикальных ускорений корпуса машины, соответствующие эталонным для данной конструкции гусеничной машины и состояния трассы заданного маршрута движения. В момент трогания гусеничной времени счетчик времени, расположенный в пульте 3 управления инструктора, начинает счет времени движения по трассе маршрута упражнения. В процессе движения обучаемого по неровностям трассы в блок 7 компараторов превышения уровня ударной нагрузки поступают сигналы, соответствующие величине допущенной перегрузки в каждом конкретном случае удара гусеничной машины о грунт или на препятствии от блока 5 датчиков вертикальных ускорений. При превышении величин ударов корпуса гусеничной машины предела, заданного схемой 6 установки уровня ударной перегрузки, на выходе компараторов блока 7 появляется сигнал, который поступает через усилитель 8 в схему задержки на одновибраторе 9, управляющего частотой переработки информации. Формируемый на выходе одновибратора имульс, через эмиторный повторитель 10 включает светодиод схемы 11 световой индикации, расположенный в смотровом приборе механика-водителя 12.
Текущая информация о плавности хода гусеничной машины и о степени реализации обучаемым возможностей системы подрессоривания отображается на логических элементах светодиодов схемы 11 световой индикации, расположенных в смотровом приборе механика-водителя.
Благодаря световой индикации ускорений корпуса гусеничной машины обучаемый наглядно видит величину допущенных ударов и одновременно учится водить гусеничную машину с такой скоростью, чтобы перегрузки были близки к верхнему допустимому пределу, но не превышали 3g.
В тоже время информация о плавности хода гусеничной машины поступает с одновибратора 9 и на счетчик 16 превышения предельных ускорений. Эта информация представляет собой, например, количество зафиксированных вертикальных ускорений по трем диапазонам предельных ускорений. С выхода счетчика 16 превышения предельных ускорений электрический сигнал поступает на цифровой индикатор 17, который показывает измеренные значения вертикальных ускорений, превышающих допустимую величину, благодаря которой обучаемый сравнительно быстро приобретает опыт в ощущении допустимых перегрузок и на сумматор 19. По сигналу окончания выполнения упражнения, подаваемому с пульта 3 управления инструктора, на блок 20 разрешения передачи сигнала цифровая информация о количестве допущенных обучаемым перегрузок, превышающих установленный на компараторе предел с сумматора 19, а также время выполнения упражнения с счетчика времени пульта 3 управления инструктора поступает в блок 21 деления, откуда количественная информация о полноте реализации скоростных возможностей гусеничной машины по плавности хода, как количество случаев допускаемых перегрузок проходит в блок 14 сравнения. Исходная информация, заложенная в задатчике 13, сравнивается с текущей и в виде соотношения текущего значения оценочных показателей качества вождения к исходному выдается на индикатор 15 оценки, а затем на пульт 3 управления инструктора. В результате этого инструктор делает вывод о достигнутом обучаемым навыке реализации скоростных возможностей гусеничной машины по плавности хода, о чем он выдает соответствующую оценку и рекомендации по совершенствованию навыков вождения гусеничной машины.
Таким образом, механики-водители, обученные на предлагаемом тренажере, получат необходимые навыки вождения гусеничной машины со средней скоростью движения на 10-15% выше при прочих равных условиях, при этом количество жестких ударов, сопровождающихся перегрузками свыше 3g, во время движения на препятствиях сократиться в среднем в 3 раза и в полтора-два раза сократится время на формирование у обучаемых навыка в ощущении ими величин вертикальных перегрузок при движении по трассам с переменными высотами неровностей. При выполнении упражнений тренажер исключает необъективность в определении оценки, а также позволяет установить конкретные ошибки в технике вождения гусеничной машины.
Применение предлагаемого тренажера позволит повысить качество обучения механиков-водителей гусеничных машин, сократить расход моторесурса реальных машин, используемых для обучения и сократить расход топлива.
Тренажер для обучения механика-водителя гусеничной машины, содержащий блок имитации визуальной обстановки, выходы которого соединены с блоком моделирования динамики движения и первым входом пульта управления инструктора, второй вход которого соединен с выходом блока моделирования динамики движения, подключенного вторым выходом к электрогидроприводу колебательного движения кабины, отличающийся тем, что в него дополнительно введены блок датчиков вертикальных ускорений, последовательно соединенные с пультом управления инструктора, схема установки уровня ударной перегрузки, блок компараторов превышения уровня ударной перегрузки, второй вход которого соединен с выходом блока датчиков вертикальных ускорений, усилитель, одновибратор, эмиттерный повторитель и схема световой индикации, размещенная в смотровом приборе механика-водителя, последовательно соединенные задатчик оценочных показателей качества управления, блок сравнения и индикатор оценки, выход которого соединен с первым входом пульта управления инструктора, последовательно соединенные счетчик превышения предельных ускорений, первый вход которого соединен с вторым выходом одновибратора и цифровой индикатор, выход которого соединен с четвертым входом пульта управления инструктора, блок формирования сигнала на автоматический сброс индикации, выход которого соединен с вторым входом счетчика превышения предельного ускорения, а вход соединен с пультом управления инструктора, последовательно соединенные сумматор, вход которого соединен с выходом счетчика превышения предельного ускорения, блок разрешения передачи сигнала, управляющий вход которого соединен с другим выходом пульта управления, и блок деления, второй вход которого соединен с третьим выходом пульта управления инструктора, а выход соединен с другим входом блока сравнения.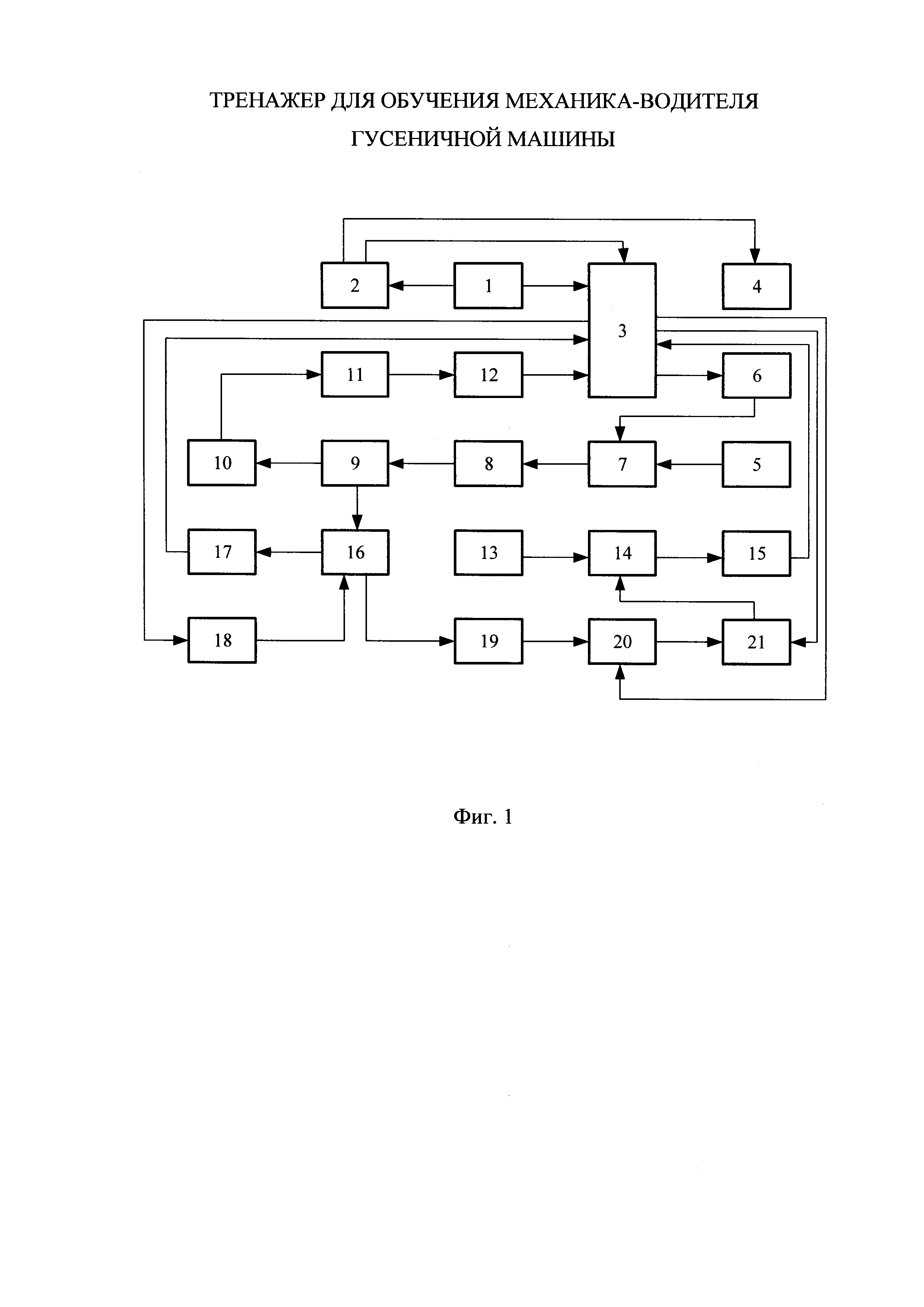
Космический аппарат
Способ обеспечения теплового режима и чистоты среды для полезной нагрузки под сборочно-защитным блоком ракеты космического назначения и устройства для его реализации (варианты)
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата
Комплексная аппаратура счисления координат
Противолодочная крылатая ракета и способ ее применения
Блок рулевого привода ракеты
Способ управления и система управления для его осуществления (варианты)
Транспортное средство для перевозки разрядных грузов
Система обеспечения электрической энергией воздушных судов
Широкополосный усилитель мощности коротковолнового диапазона
Устройство для моделирования движения гусеничной машины
Тренажер обучения вождению гусеничной машины
Способ погрузки боекомплекта в боевую машину в условиях огневого воздействия противника
Подвижное средство технического обслуживания и ремонта боевой экипировки военнослужащих

