Результат интеллектуальной деятельности: Способ управления положением модели в аэродинамической трубе
Вид РИД
Изобретение
Изобретение относится к области экспериментальной аэродинамики, в частности, к автоматическим системам управления положением модели в аэродинамических трубах.
Проведение аэродинамических испытаний моделей летательных аппаратов (ЛА) в аэродинамических трубах (АДТ) предполагает изменение положения модели в рабочей части (РЧ) АДТ относительно воздушного потока, в том числе и по углу атаки α. Кроме того, в АДТ с большими размерами РЧ необходимы горизонтальные (по оси X) и вертикальные (по оси У) перемещения державки модели, возвращение модели в горизонтальное положение при аварии приводного механизма для штатного останова сверхзвуковой АДТ.
Известно устройство, осуществляющее способ изменения положения модели ЛА с помощью продольного перемещения каретки посредством привода через двуплечий рычаг, подвешенный на неподвижных опорах, который поворачивается и, взаимодействуя со стойкой и тягой, перемещает державку в радиальном направлении, одновременно поворачивая ее по углу атаки (Авторское свидетельство СССР №811983, МПК G01M 9/08 // G01M 9/04, 1979).
Этот способ управления имеет недостатки, влияющие на качество подготовки и проведения эксперимента. Так, в сверхзвуковой АДТ перед началом и окончанием эксперимента требуется вернуть модель ЛА в строго горизонтальное положение, чтобы ударная волна не разрушила ее при запуске или остановке трубы. В случае отказа хотя бы одного элемента привода во время эксперимента выполнить это требование не удастся, что может привести к разрушению модели. Кроме того, способ не допускает перемещений державки в горизонтальной и вертикальной плоскостях.
Известно устройство, осуществляющее способ изменения угла атаки модели в аэродинамической трубе, использующий приводное устройство по принципу рычага (Авторское свидетельство СССР №1543969, МПК G01M 9/00, 1987). Способ изменения положения модели ЛА осуществляют посредством привода через основной параллелограммный механизм, связанный через стойку с шарнирным многозвенником, содержащим тягу, который с помощью двуплечего рычага шарнирного узла через ось осуществляет поворот модели.
Недостатком этого способа, как и предыдущего, является невозможность возврата модели в исходное горизонтальное положение при отказе привода. Также способ не допускает перемещений державки в горизонтальной и вертикальной плоскостях.
Задачей и техническим результатом изобретения является разработка способа управления положением модели ЛА в аэродинамической, позволяющего изменять угол атаки модели в процессе эксперимента на заданную величину с заданной скоростью, возвращать модель в горизонтальное положение при отказе привода в процессе эксперимента и перемещать ее в горизонтальной и вертикальной плоскостях с заданной точностью.
Решение поставленной задачи и технический результат достигаются тем, что в способе управления механизмом изменения положения модели летательного аппарата в аэродинамической трубе, включающем размещение модели между двумя узлами крепления державки к силовым механизмам управления положением державки, причем в исходном положении модель размещают таким образом, что ее ось вращения находится на равном расстоянии от узлов крепления державки, положение узлов крепления державки изменяют автоматически по трем параметрам управления: углу атаки, вертикальному и горизонтальному перемещениям в соответствии с заданной программой, вырабатывающей на каждом такте управления сигнал управления силовыми механизмами - линейными приводами, рассчитывают длины штоков линейных приводов на текущем такте управления и приращение параметров управления. Кроме того, определяют скорость приращения длин линейных приводов, управление линейными приводами ведут по скорости, а контроль управления осуществляют по длине приводов.
Вводят постоянную измерительную декартовую систему координат (ИСК) ХОУ, где вертикальная ось OY проходит через точку С, а ось ОХ, ортогональная оси ОУ, лежит в вертикальной плоскости и проходит через середину ED при t=0 (в начальный момент времени), когда модель находится в горизонтальном положении. Также вводят связанную СК (ССК) X'O'Y', где точка О' находится в центре масс модели, ось О'Х' направлена вдоль главной продольной оси инерции модели ЛА, О'Y' - расположена в вертикальной плоскости симметрии и ортогональна О'Х'. Угол атаки α - угол между обращенным вектором скорости (или осью ОХ) и осью О'Х'; угол α0 - исходный угол атаки (угол между осью ОХ ИСК и осью О'Х'0 ССК при t=0.
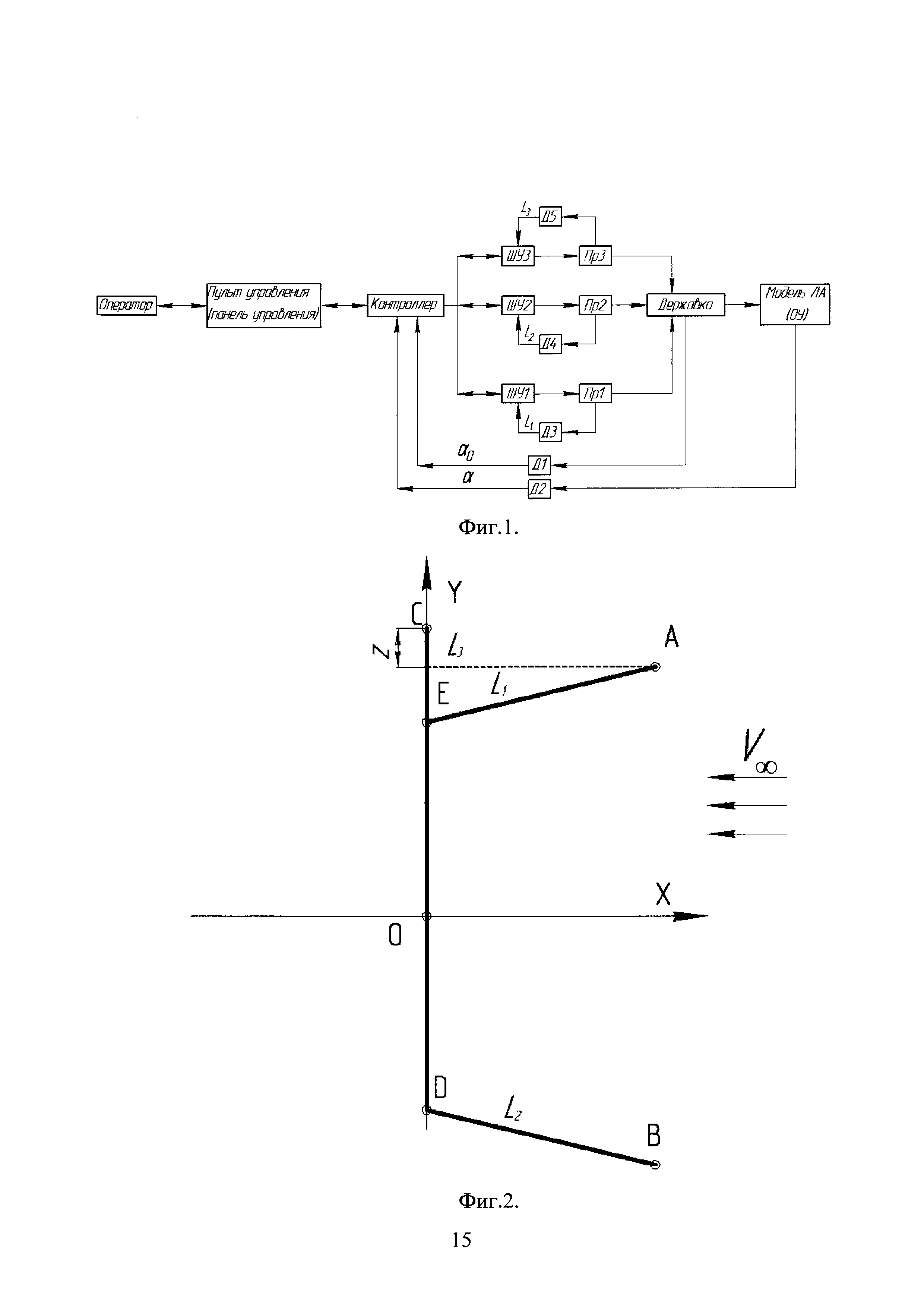
На фиг. 1 представлена принципиальная схема управления.
На фиг. 2 представлена кинематическая схема управления углом атаки α ЛА с использованием в качестве приводных механизмов трех линейных приводов (электроцилиндров).
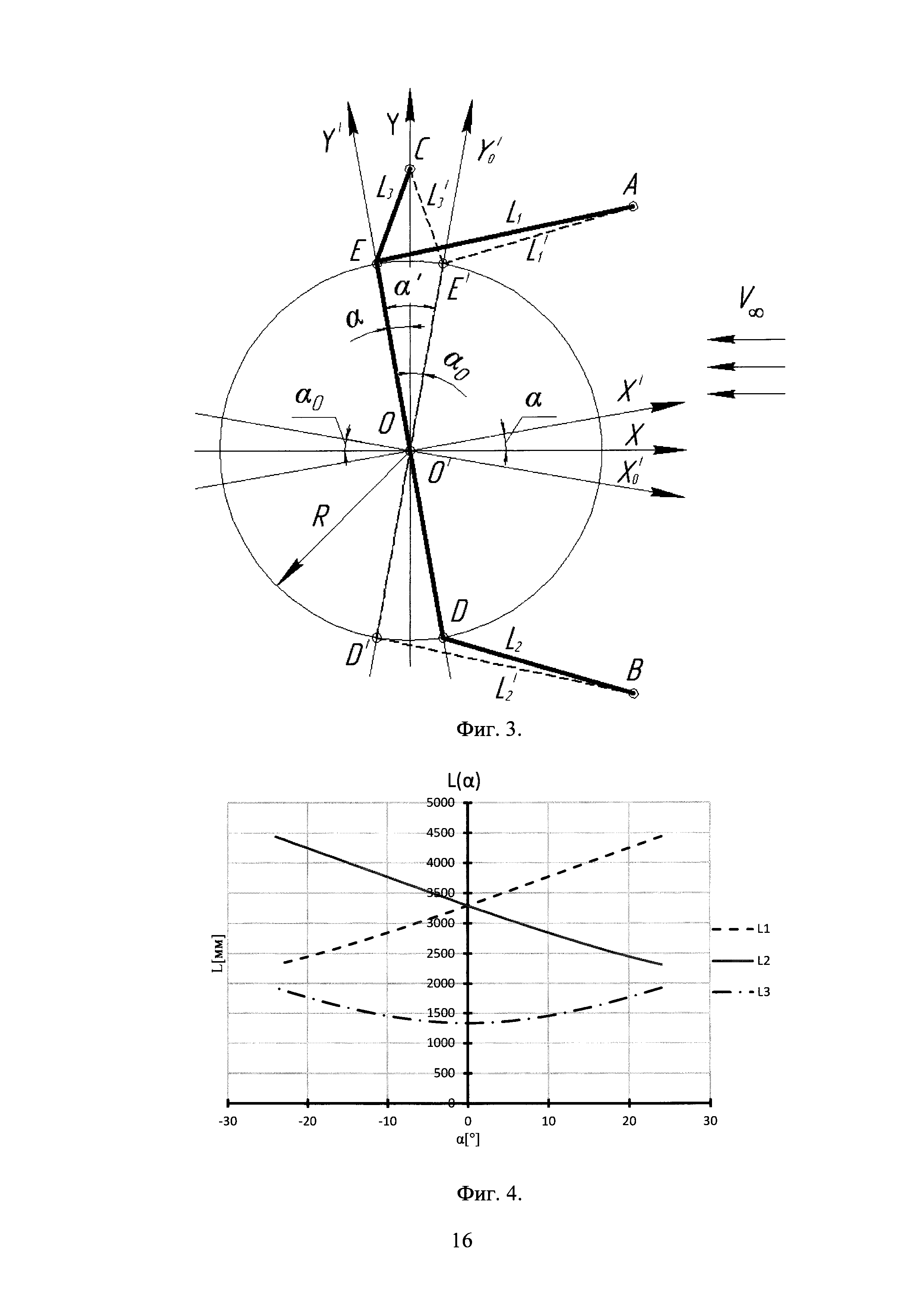
На фиг. 3 представлена кинематическая схема управления углом атаки α модели ЛА.
На фиг. 4 приведен график зависимости длин штоков от угла атаки для случая управления углом атаки α модели ЛА.
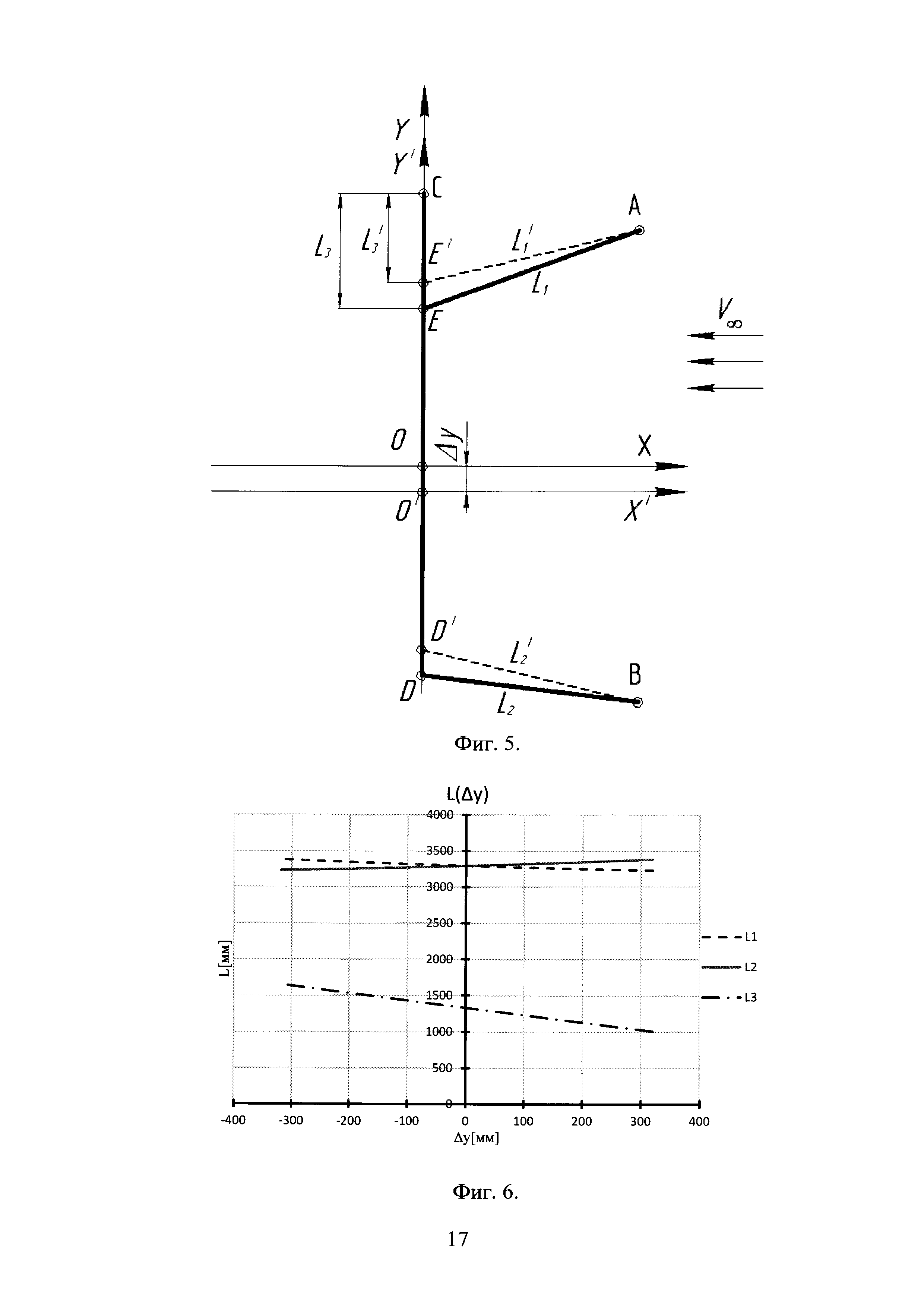
На фиг. 5 представлена кинематическая схема управления положением модели ЛА в вертикальной плоскости.
На фиг. 6 приведен график зависимости длин штоков от вертикального смещения державки.
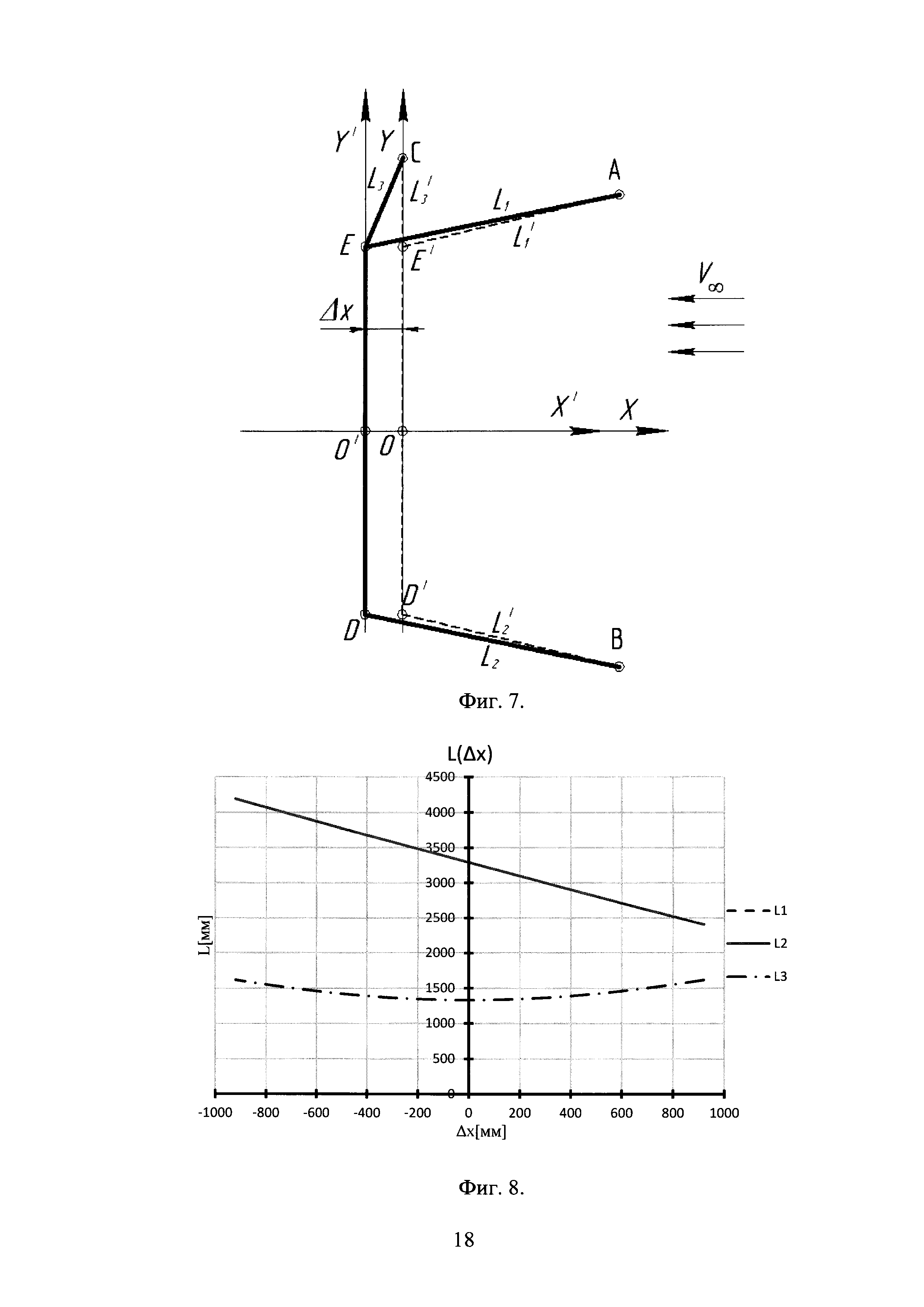
На фиг. 7 представлена кинематическая схема управления положением модели ЛА в горизонтальной плоскости.
На фиг. 8 приведен график зависимости длин штоков от горизонтального смещения державки.
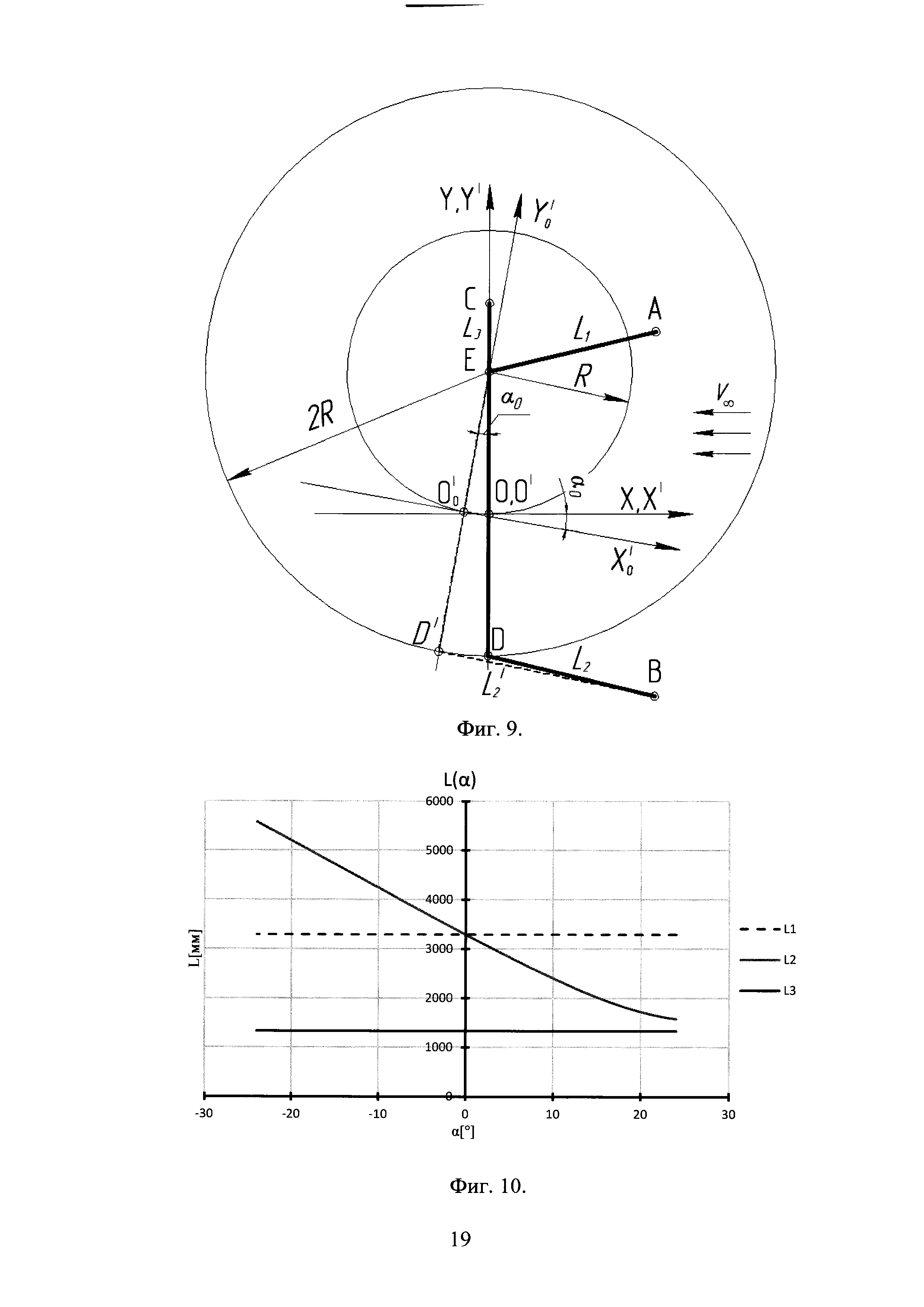
На фиг. 9 представлена кинематическая схема управления углом атаки модели ЛА одним нижним приводом L2.
На фиг. 10 приведен график зависимости длин штоков от угла атаки для случая управления углом атаки модели ЛА одним нижним приводом L2.
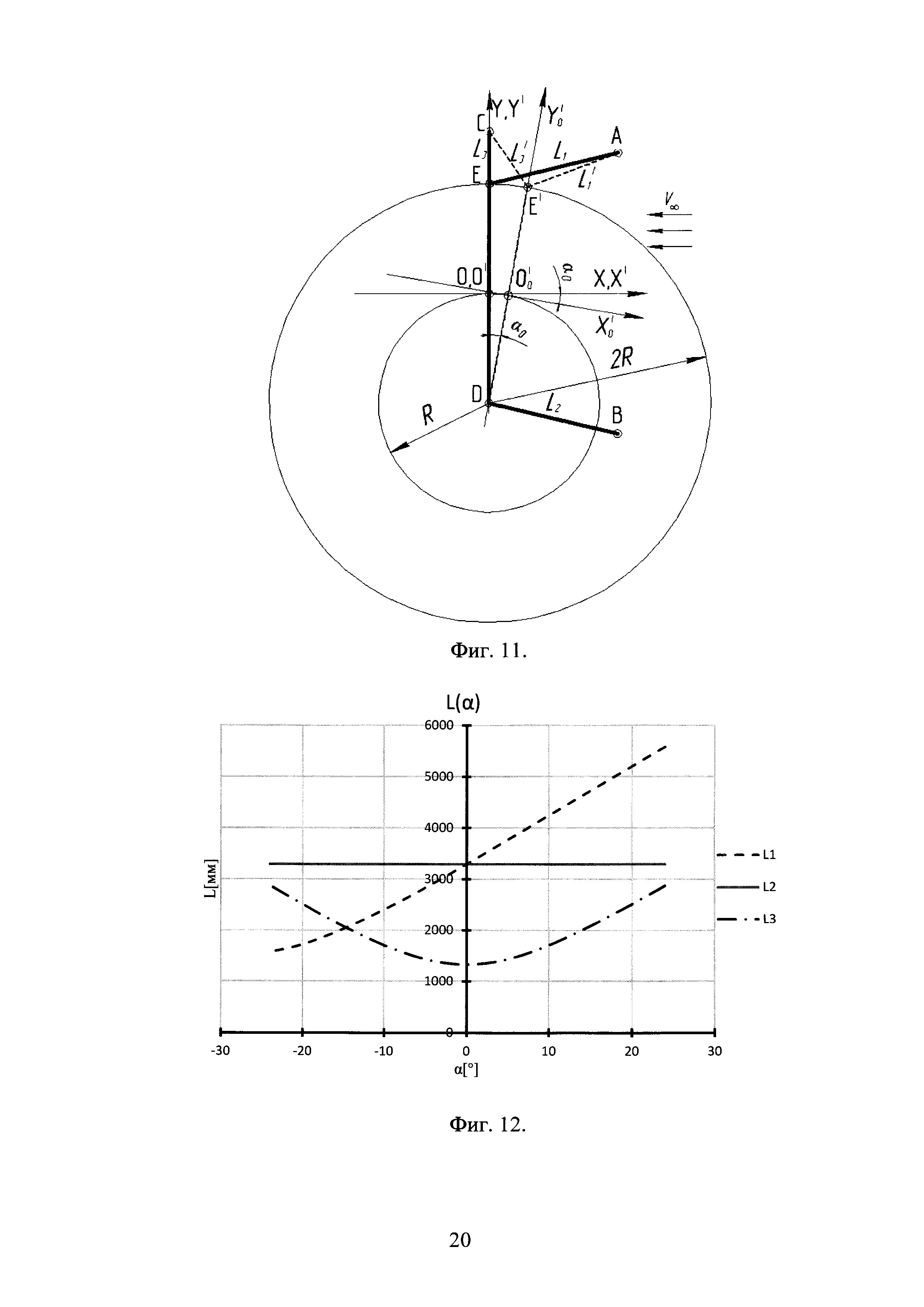
На фиг. 11 представлена кинематическая схема управления углом атаки модели ЛА приводами L1, L3.
На фиг. 12 приведен график зависимости длин штоков от угла атаки для случая управления углом атаки модели ЛА приводами L1, L3.
На фиг. 1 представлена принципиальная схема управления. Оператор с пульта управления задает на контроллер параметр управления (угол атаки ЛА, перемещение в горизонтальной или вертикальной плоскости) и его конечное значение. На каждом шаге управления контроллер рассчитывает задание на изменение координат приводных узлов и длины штоков электроцилиндров. С контроллера управляющий сигнал на выдвижение, реверс или останов штоков электроцилиндров поступает в шкафы управления электроцилиндрами ШУ1, ШУ2, ШУ3, из шкафов управления сигнал поступает на электроцилиндры Пр1, Пр2, Пр3, и соответствующие штоки изменяют свою длину до заданного значения, происходит поворот или смещение державки с моделью ЛА. Обратная связь осуществляют через датчики положения Д3, Д4, Д5, которые измеряют длины штоков с высокой точностью. В шкафы управления и, далее, в контроллер поступает информация о текущих длинах штоков. Контроллер контролирует выполнение задания. Если на такте управления какой-либо привод не выполняет задание, то ситуация считается аварийной, и контроллер меняет режим работы системы на аварийный (останов неисправного привода и возвращение модели в горизонтальное положение двумя рабочими приводами). При достижении заданного положения державки и (или) модели ЛА по показаниям датчиков Д3, Д4, Д5 и положения державки Д1 α0 и (или) положения модели Д2 α задание считается выполненным, и контроллер дает команду на останов приводных механизмов.
На фиг. 2 представлена кинематическая схема управления механизмом изменения угла атаки α модели, использующим в качестве приводных механизмов три электроцилиндра АЕ, СЕ и BD с длинами штоков L1, L3 и L2, соответственно, приводящие в движение любое поворотное устройство, где EO=OD. Модель с осью вращения в точке О закреплена на державке навстречу потоку V∞ на равном расстоянии от узлов крепления к электроцилиндрам. Точками крепления штоков электроцилиндров к поворотному устройству являются точки Е и D («приводные узлы»). Точками крепления электроцилиндров к потолку рабочей части АДТ являются точки А и С. Точкой крепления электроцилиндра к полу рабочей части АДТ является точка B. Координаты точек крепления приводных механизмов определяют в ИСК ХОУ, направление воздушного потока показано стрелками V∞. Координаты точек А(хА,уА), В(xB,yB), С(xC,yC) определены конструкцией.
На фиг. 3 представлена кинематическая схема управления углом атаки α модели ЛА. Начальное положение системы представлено в виде штриховых линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е' и D', длины штоков -  . Конечное положение системы представлено в виде сплошных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. При повороте механизма изменения положения модели ЛА точки крепления (приводные узлы) движутся по окружности радиуса R с центром в точке О.
. Конечное положение системы представлено в виде сплошных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. При повороте механизма изменения положения модели ЛА точки крепления (приводные узлы) движутся по окружности радиуса R с центром в точке О.
Управление ведут по заданному на данный такт управления углу атаки α от начального до конечного значения:
рассчитывают заданное значение длин штоков электроцилиндров на n-ом такте управления:



где хЕ, уЕ, xD, yD - координаты приводных узлов Е и D, заданные на n-ном такте управления:
xE[n]=-R⋅sinα[n]; yE[n]=R⋅cosα[n];
xD[n]=R⋅sinα[n]; yD[n]=-R⋅cosα[n];
координаты точек крепления электроцилиндров к элементам рабочей части АДТ хА, уА, xB, yB, xC, yC заданы конструкцией.
координаты приводных точек определяют приращением угла атаки на текущем n-ном такте управления, которое является квантом задания
Δα[n]=ωз⋅Δt,
где
Δα[n] - приращение угла атаки на n-ном такте управления;
ωз - заданная угловая скорость изменения угла атаки;
Δt - временной интервал выдачи команд управления;
определяют заданный угол атаки на n-ном такте управления
где α0 - исходный угол атаки.
Управление ведут синхронно для всех приводных механизмов. В случае рассогласования текущих длин штоков электроцилиндров задание на следующий такт управления не меняют.
На фиг. 4 приведен график зависимости длин штоков от угла атаки для случая управления углом атаки α модели летательного аппарата. Оси абсцисс соответствуют значения угла атаки α[°], оси ординат - длины штоков L[мм]. L1 - длина штока АЕ, L2 - длина штока BD, L3 - длина штока СЕ (фиг. 3). На графике видно, что при повороте системы относительно α=0 в положительном направлении (против часовой стрелки) L1 и L3 возрастают, L2 - убывает; если поворот осуществляют в отрицательном направлении (по часовой стрелке), то L1 убывает, L2 и L3 - возрастают.
На фиг. 5 представлена кинематическая схема управления положением модели ЛА в вертикальной плоскости. Начальное положение системы представлено в виде штриховых линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е' и D', длины штоков - . Конечное положение системы представлено в виде сплошных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены, как Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. Вертикальное смещение Δу.
Управление ведут по заданным на данный такт управления координатам вертикального положения от начального до конечного значения:
рассчитывают заданное значение длин штоков электроцилиндров на n-ом такте управления:



где хЕ, уЕ, xD, yD - координаты приводных узлов Е и D, заданные на n-ном такте управления:
хЕ[n]=0; yE[n]=R+Δy;
xD[n]=0; yD[n]=-R+Δy;
координаты точек крепления электроцилиндров к элементам рабочей части АДТ хА, уА, xB, yB, xC, yC заданы конструкцией.
Координаты приводных точек определяют приращением координаты по оси ОУ на текущем n-ном такте управления, которое является квантом задания:
Δy[n]=Vз⋅Δt,
где
Δу[n] _ приращение по вертикальному перемещению на n-ном такте управления, относительно центра О ИСК (при смещении конструкции вверх Δу>0, при смещении конструкции вниз Δу<0);
Vз - заданная скорость изменения высоты державки (при смещении конструкции вверх Vз>0, при смещении конструкции вниз Vз≤0);
Δt - временной интервал выдачи команд управления.
определяют заданную высоту державки на n-ном такте управления
где у0 - исходное положение точек E и D относительно центра О ИСК;
Управление ведут синхронно для всех приводных механизмов. В случае рассогласования текущих длин штоков электроцилиндров задание на следующий такт управления не меняют.
На фиг. 6 приведен график зависимости длин штоков от вертикального смещения державки. Оси абсцисс соответствуют значения смещения в вертикальной плоскости Δу [мм], оси ординат - длины штоков L[мм]. L1 - длина штока АЕ, L2 - длина штока BD, L3 - длина штока СЕ (фиг. 5). На графике видно, что при смещении системы относительно у=0 в положительном направлении (вверх) L1 и L3 убывают, L2 - возрастает; если смещение осуществляют в отрицательном направлении (вниз), то L1 и L3 возрастают, L2 - убывает.
На фиг. 7 представлена кинематическая схема управления положением модели ЛА в горизонтальной плоскости. Начальное положение системы представлено в виде штриховых линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е' и D', длины штоков - . Конечное положение системы представлено в виде сплошных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. Горизонтальное смещение Δх.
Управление ведут по заданному на данный такт управления горизонтальному расположению державки от начального до конечного значения:
рассчитывают заданное значение длин штоков электроцилиндров на n-ом такте управления:



где хЕ, уЕ, xD, yD - координаты заданных на n-ном такте управления точек крепления штоков электроцилиндров к поворотному устройству Е и D:
хЕ[n]=0+Δх; yE[n]=R;
xD[n]=0+Δx; yD[n]=-R;
координаты приводных точек крепления электроцилиндров к элементам рабочей части АДТ xA, yA, xB, yB, xC, yC заданы конструкцией.
Координаты приводных точек определяют приращением по расстоянию на текущем n-ном такте управления, которое является квантом задания:
Δx[n]=Vз⋅Δt,
где
Δx[n] - приращение по горизонтальному перемещению на n-ном такте управления, относительно центра О ИСК (при смещении конструкции в положительном направлении оси ОХ: Δх>0, в отрицательном: Δx<0);
Vз - заданная скорость изменения расстояния державки (при смещении конструкции в положительном направлении оси ОХ: Vз>0, в отрицательном: Vз<0);
Δt - временной интервал выдачи команд управления.
определяют заданное смещение державки в горизонтальном направлении на n-ном такте управления
где x0 - исходное положение точек E и D относительно центра О ИСК.
Управление ведут синхронно для всех приводных механизмов. В случае рассогласования текущих длин штоков электроцилиндров задание на следующий такт управления не меняют.
На фиг. 8 приведен график зависимости длин штоков от горизонтального смещения державки. Оси абсцисс соответствуют значения смещения в горизонтальной плоскости Δx [мм], оси ординат - длины штоков L[мм]. L1 - длина штока АЕ (фиг. 7), L2 - длина штока BD (фиг. 6), L3 - длина штока СЕ (фиг. 7). На графике видно, что при смещении системы относительно х=0 в положительном направлении (вправо) L1 и L2 совпадают и убывают, L3 - возрастает; при смещении в отрицательном направлении (влево) L1 и L2 совпадают и возрастают, L3 - возрастает.
На фиг. 9 представлена кинематическая схема управления углом атаки модели ЛА одним нижним приводом L2. Начальное положение системы представлено в виде штриховых линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D', длины штоков -  . Конечное положение системы представлено в виде основных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. В конечный момент времени соответствующие оси ИСК и ССК должны совпасть. При повороте механизма изменения положения модели ЛА нижняя точка движется по окружности радиуса 2R с центром в точке Е, а центр масс - по окружности радиуса R с центром в точке Е.
. Конечное положение системы представлено в виде основных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. В конечный момент времени соответствующие оси ИСК и ССК должны совпасть. При повороте механизма изменения положения модели ЛА нижняя точка движется по окружности радиуса 2R с центром в точке Е, а центр масс - по окружности радиуса R с центром в точке Е.
В аварийной ситуации, при отказе одного из верхних приводов, управление ведут по заданному на данный такт управления углу атаки α от начального до нулевого значения с помощью нижнего привода.
Рассчитывают заданное значение длины штока нижнего электроцилиндра на n-ом такте управления:

где xD, yD - координаты заданной на n-ном такте управления точки крепления штока электроцилиндра к поворотному устройству Е и D:
xD[n]=-2R⋅sinα[n]; yD[n]=R(1-2⋅cosα[n]),
координаты приводных точек крепления электроцилиндров к элементам рабочей части АДТ хА, уА, xB, yB, xC, yC заданы конструкцией.
координаты определяют приращением угла атаки на текущем n-ном такте управления, которое является квантом задания:
Δα[n]=ωз⋅Δt,
где
Δα[n] - приращение угла атаки на n-ном такте управления;
ωз - заданная угловая скорость изменения угла атаки;
Δt - временной интервал выдачи команд управления.
определяют заданный угол атаки на n-ном такте управления
где α0 - исходный угол атаки;
Управление ведут нижним приводным механизмом. Движение первого и третьего верхних приводов останавливают.
На фиг. 10 приведен график зависимости длин штоков от угла атаки для случая управления углом атаки модели ЛА одним нижним приводом L2.. Оси абсцисс соответствуют значения угла атаки α[°], оси ординат - длины штоков L[мм]. L1 - длина штока АЕ, L2 - длина штока BD, L3 - длина штока СЕ (фиг. 9). На графике видно, что при повороте системы относительно неподвижной точки Е в положение α=0 в положительном направлении (против часовой стрелки) L1 и L3 - const, L2 - убывает; если поворот осуществляют в отрицательном направлении (по часовой стрелке), то L1 и L3 - const, L2 - возрастает.
На фиг. 11 представлена кинематическая схема управления углом атаки модели ЛА приводами L1, L3. Начальное положение системы представлено в виде штриховых линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е' и D, длины штоков -  . Конечное положение системы представлено в виде основных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. При повороте механизма изменения положения модели ЛА точка Е' движется по окружности радиуса 2R с центром в точке D, а центр масс - по окружности радиуса R с центром в точке D.
. Конечное положение системы представлено в виде основных линий. Точки крепления штоков электроцилиндров к поворотному устройству обозначены Е и D, длины штоков - L1, L2, L3. Направление воздушного потока показано стрелками V∞. При повороте механизма изменения положения модели ЛА точка Е' движется по окружности радиуса 2R с центром в точке D, а центр масс - по окружности радиуса R с центром в точке D.
В аварийной ситуации, при отказе нижнего привода L2, управление ведут по заданному на данный такт управления углу атаки α, от начального до значения равного нулю с помощью верхних приводов.
Рассчитывают заданные значения длин штоков верхних электроцилиндров на n-ом такте управления, т.е



где хЕ, уЕ - координаты заданной на n-ном такте управления точки крепления штоков электроцилиндров к поворотному устройству Е и D:
xE[n]=2⋅R⋅sinα[n]; уЕ[n]=R⋅(2⋅cosα[n]-1),
координаты точек крепления электроцилиндров к элементам рабочей части АДТ хА, уА, xB, yB, xC, yC заданы конструкцией.
Координаты определяют приращением угла атаки на текущем n-ном такте управления, которое является квантом задания:
Δα[n]=ωз⋅Δt,
где
Δα[n] - приращение угла атаки на n-ном такте управления;
ωз - заданная угловая скорость изменения угла атаки;
Δt - временной интервал выдачи команд управления.
определяют заданный угол атаки на n-ном такте управления
где α0 - исходный угол атаки;
Управление ведут верхними приводными механизмами.
На фиг. 12 приведен график зависимости длин штоков от угла атаки для случая управления углом атаки модели ЛА приводами L1, L3. Оси абсцисс соответствуют значения угла атаки α[°], оси ординат - длины штоков L[мм]. L1 - длина штока АЕ, L2 - длина штока BD, L3 - длина штока СЕ (фиг. 11). На графике видно, что при повороте системы относительно неподвижной точки Е в положение α=0 в положительном направлении (против часовой стрелки) L2 - const, L1 - убывает, L3 - возрастает; если поворот осуществляют в отрицательном направлении (по часовой стрелке), то L2 - const, L1 и L3 - возрастают.
Таким образом, способ управления механизмом изменения положения модели ЛА позволяет управлять углом атаки модели, ее положением как в вертикальной, так и в горизонтальной плоскости, а также возвращением модели в исходное положение при отказе одного из приводов.
Положительные результаты использования способа подтверждены математическим моделированием.
Блок-имитатор температурных полей
Способ хранения атомарного водорода
Устройство для измерения параметров потока
Способ снижения вертикальных и угловых перегрузок транспортного средства при движении по поверхности и транспортное средство, реализующее этот способ
Устройство и способ для измерения быстропеременного давления
Способ определения остаточных напряжений в композиционных материалах
Способ управления упругими изгибными и крутильными деформациями несущей поверхности и устройство для его реализации
Устройство для улучшения вывода самолета из штопора
Динамически подобная аэродинамическая модель несущей поверхности летательного аппарата
Регулятор давления воздуха в форкамере аэродинамической трубы с форсированным выходом на заданный режим
Способ управления гибкими стенками сопла аэродинамической трубы
Устройство для согласования приводных рядов гибких стенок сопла аэродинамической трубы
Устройство для управления гибкими стенками сопла аэродинамической трубы
Система подогрева постели
Регулятор давления воздуха в форкамере аэродинамической трубы с форсированным выходом на заданный режим
Регулятор давления воздуха в форкамере аэродинамической трубы
Способ регулирования давления в замкнутом объеме и устройство для его реализации
Способ управления положением модели в аэродинамической трубе

