Результат интеллектуальной деятельности: Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф
Вид РИД
Изобретение
Изобретение относится к судостроению, а именно к способам контроля процесса эвакуации людей с гибнущего судна, и может быть использовано при создании интеллектуальных систем поддержки принятия решений (ППР) при обеспечении безопасности человека на море.
Цель изобретения - повышение эффективности процесса эвакуации экипажа и пассажиров при ухудшении мореходных качеств и возникновении аварийных ситуаций в штормовых условиях на основе выработки управляющих решений.
Наиболее близким техническим решением моделирования процесса эвакуации и пассажиров при возникновении морских катастроф является «Способ контроля мореходности судов» по патенту РФ №2147540 от 20.04.2000, на базе которого можно оценить состояние судна и внешние условия, при которых организуется процесс эвакуации. Этот патент использован в качестве прототипа.
Известен способ контроля мореходности судна, основанный на измерении периода бортовой качки и определения расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки носом и кормой, кажущийся период волны, курсовой угол и скорость судна на нерегулярном волнении, а также угловые перемещения относительно поперечной и вертикальной осей, линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей, глубину воды под килем на миделе судна, устанавливают фактор, характеризующий наличие мелководья, и в зависимости от этого фактора определяют фактическую метацентрическую высоту и скоростной режим, обеспечивающий безопасность эксплуатации судна.
Недостатками вышеуказанного способа являются отсутствие приложения результатов контроля при возникновении аварийных ситуаций, связанных с резким ухудшением мореходных качеств судов в штормовых условиях.
Технический результат достигается с помощью функциональных блоков, реализующих процесс эвакуации на основе мультиагентной системы (MAC) и динамической визуализации процесса эвакуации с использованием датчиков сенсорной системы, позволяющей во время имитации движения экипажа и пассажиров по заданному маршруту инициировать реакцию виртуальных агентов MAC на циклические изменения угловых перемещений, скоростей и ускорений аварийного судна.
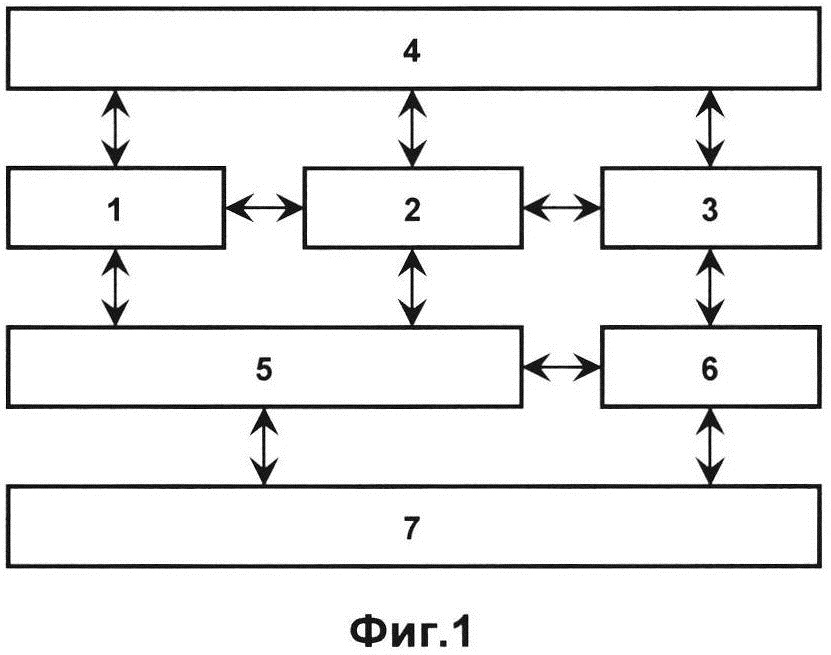
На фиг. 1 показана структурно-функциональная схема, реализующая предлагаемый способ контроля эвакуации экипажа и пассажиров при возникновении морских катастроф. Схема включает 4 основных блока, обеспечивающих контроль состояния судна и внешней среды на основе способа контроля мореходности судна, среди этих блоков выделены: блок 1 быстродействующей бортовой ЭВМ с интеллектуальным процессором и печатающим устройством, блоки, содержащие цветной графический дисплей 2 и экспертную систему (ЭС) 3, включающую базу знаний, базу данных, механизм логического вывода и систему объяснений, блок 4 датчиков измерительной информации совместно с блоком коммутации и процессорами предварительной обработки информации (процессор-классификатор, процессор-редактор и метрологический процессор). Схема дополнена функциональными блоками MAC, содержащими блок генерации среды взаимодействия 5, блок генерации сценариев эвакуации 6 и блок динамической визуализации 7.
Блок генерации среды взаимодействия 5 содержит модель процесса эвакуации на основе генерации MAC с использованием особенностей виртуальных агентов, характеристик судна, содержащихся в базе данных ЭС 3, воспроизведения стохастических изменений внешней среды и нерегулярных колебаний аварийного судна на основе результатов динамических измерений блока 4, движения экипажа и пассажиров в процессе эвакуации с учетом угловых перемещений, локальных скоростей и ускорений, вызванных измеренными колебаниями судна.
Блок генерации сценариев эвакуации 6 обеспечивает воспроизведение различных стратегий поведения экипажа и пассажиров на основе MAC, функционирование которой обеспечивается путем синтеза решений, поддерживаемых базой данных характеристик судна и внешней среды ЭС 3, блоками 5, 7 MAC и интерфейсом управления процессом эвакуации на основе цветного графического дисплея 2.
Блок динамической визуализации 7 содержит визуализатор процессов эвакуации, поддерживающий технологию виртуальной реальности путем взаимодействия с блоком генерации сценариев эвакуации 6 в различных режимах перемещения экипажа и пассажиров, и интерфейс визуализации с пультом оператора на базе цветного графического дисплея 2, с помощью которого оператору предоставляется возможность выбора нужного сценария с учетом геометрических особенностей судна и процесса эвакуации.
Работа функциональных блоков 5, 6, 7 инициируется ЭС 3 на основе оценки состояния мореходности судна по критериям Российского Морского Регистра судоходства, определяющим требования к характеристикам остойчивости и непотопляемости судов. В случае нарушения этих требований ЭС формирует заключение о возможности возникновения аварийной ситуации и передает его на пульт оператора 2 вместе с данными о состоянии судна и внешней среды. Анализируя эти данные, оператор принимает решение о необходимости осуществления эвакуации экипажа и пассажиров с аварийного судна.
Функциональные элементы блока 5 содержат модель агента, модель его движения и модель среды мультиагентного моделирования.
Для описания множества агентов в MAC используют объект вида:

где Ag(N) - множество агентов; N=m+n; m - число членов экипажа; n - общее число пассажиров; Ag(TR) - множество типов взаимодействия агентов в процессе эвакуации; Ag(С) - множество классов агентов; GR(U) - нечеткий семантический граф соединений отдельных агентов в множестве Ag(N); V(Int) - оператор установления взаимодействий между агентами, заданный в виде отображения

Модель агента представляет собой виртуальный объект, описываемый кортежем:

Здесь (x, y, k) - текущие координаты агента в пространстве размерности 2,5D (k - номер палубы), Ag(P) - вектор индивидуальных свойств агента, Ф - функционал, формирующий маршрут агента между начальной точкой (каютой, постом) M(Int) и конечной (эвакуационным выходом) M(Out).
Индивидуальные свойства агента представляются набором дискретных признаков на основе классификации по физическим возможностям, психологической подготовке (активные участники - лидеры, пассивные участники процесса, участники, впадающие в неконтролируемую панику); наличию навыков борьбы за живучесть и спасение на водах (инструктированные и не инструктированные). Функционал Ф задает исходный (планируемый) маршрут агента, который может меняться на основе восприятия внешней среды (изменения обстановки).
В модели агента используют различные варианты маршрутов, воспроизводящих поведение людей при эвакуации: априорный выбор маршрута согласно плану эвакуации; выбор кратчайшего маршрута по собственным предпочтениям (активные пассажиры); следование за лидером или нахождение в каюте в отсутствие лидера (пассивные пассажиры); неконтролируемые перемещения (пассажиры, впадающие в панику). При этом все агенты обладают вестибулярными сенсорами, функционирующими от сенсорной системы, позволяющей во время движения по маршруту инициировать реакцию на циклические изменения угловых перемещений, скоростей и ускорений аварийного судна. Дополнительные исполнительные механизмы реализуют выбывание агента из процесса эвакуации (неспособность двигаться самостоятельно) вследствие падения или столкновения с препятствиями.
Модель движения агентов по качающемуся судну описывается в виде изменения скорости  k-го индивидуума с унифицированной единичной массой в виде уравнения:
k-го индивидуума с унифицированной единичной массой в виде уравнения:

Здесь  - случайные отклонения, связанные с неоднородностью популяции MAC, а
- случайные отклонения, связанные с неоднородностью популяции MAC, а  - результирующая сила, учитывающая направление движения агента, величина которой определяется силой, обусловленной собственным ускорением агента, силой взаимного отталкивания (недопущения столкновений) между агентами, силой отталкивания между агентом и препятствием, силой притяжения между агентом и окружающими его объектами (другие пассажиры, стационарные объекты - поручни или леера на стенах).
- результирующая сила, учитывающая направление движения агента, величина которой определяется силой, обусловленной собственным ускорением агента, силой взаимного отталкивания (недопущения столкновений) между агентами, силой отталкивания между агентом и препятствием, силой притяжения между агентом и окружающими его объектами (другие пассажиры, стационарные объекты - поручни или леера на стенах).
Учет влияния качки производится путем введения в общее уравнение (4) компонентов  и
и  , зависящих от комплексов X,
, зависящих от комплексов X,  ,
,  - линейных и угловых перемещений, скоростей и ускорений качки судна в различных плоскостях. Причем, компонент
- линейных и угловых перемещений, скоростей и ускорений качки судна в различных плоскостях. Причем, компонент  совокупно характеризует статические и динамические силы, влияющие на передвижение агента по поверхности переменного наклона, а компонент
совокупно характеризует статические и динамические силы, влияющие на передвижение агента по поверхности переменного наклона, а компонент  определяет силы, связанные со сменой режима движения по поверхности переменного наклона: проскальзыванием или падением. Кроме того, вводится компонент
определяет силы, связанные со сменой режима движения по поверхности переменного наклона: проскальзыванием или падением. Кроме того, вводится компонент  (D - водоизмещение судна), связанный с нормировкой при приведении действующих на агента как на материальное тело физических сил, к безразмерным социальным силам.
(D - водоизмещение судна), связанный с нормировкой при приведении действующих на агента как на материальное тело физических сил, к безразмерным социальным силам.
В зависимости от особенностей аварийной ситуации используют различные математические модели взаимодействия судна с внешней средой на основе Правил классификации и постройки морских судов (Правила классификации и постройки морских судов // Российский Морской Регистр судоходства. Т. 1. СПб., 2005), а также данные динамических измерений комплексов (X, , ), определяющих векторные поля перемещений, скоростей и ускорений аварийного судна, соответствующих действующим ветроволновым возмущениям:

где W, V, Sh - состояния внешней среды (волнение W, ветер V) и судна Sh; t* - наименование моментов перехода между состояниями; α, β - предусловие и постусловие перехода.
Таким образом, метод мультиагентного моделирования, реализуемый в блоке 5, позволяет одновременно учитывать как коллективное движение агентов, так и воздействие локальных наклонов палубы и локальных ускорений, воспроизводить ситуации прямых столкновений агентов друг с другом или с препятствиями (из-за качки агенты не могут удержаться на выбранной траектории), что позволяет оценивать степень опасности процесса эвакуации в различных режимах поведения аварийного судна.
Моделью среды MAC (модель пространства перемещений) является геометрическая модель судна в виде набора палуб, связанных между собой каналами вертикального передвижения (трапами, лестницами, лифтами). В основе геометрической модели лежит план основных отсеков и помещений судна (по палубам), для которого формируется неориентированный граф перемещений

где V - множество вершин, Е - множество дуг, каждая из которых соответствует характерному пути перемещения, е∈Е определяется как е=<u,v,O>, где (u,v)∈V - вершины графа; О - параметры, определяющие возможности каждого участка (путь доступен, недоступен, условно доступен при определенных свойствах агента).
Для построения графа перемещений применен метод растеризации пространства на основе квадродеревьев (фиг. 2), позволяющий разбивать пространство палубы на квадранты с заданным шагом. Вершины графа перемещений ассоциированы с точками траекторий, связанных с начальным положением агентов на объекте (размещение пассажиров по каютам, экипажа - по рабочим местам), а также с целевыми объектами в ходе эвакуации (выходы на шлюпочную палубу). Обозначения А-Г на фиг. 2 определяют каюты А, коридоры Б, трапы В и лифты Г. К одной точке траектории могут быть привязаны один или несколько агентов.
Блок генерации сценариев эвакуации 6 реализует стратегию мультиагентного моделирования, включающую различные сочетания сценариев взаимодействия среды MAC в виде ситуационной модели игры с динамически меняющимся классом стратегий и управляемым сценарием, описываемым конечным графом:

Здесь структура S(Ag)tj объединяет все рассматриваемые (эталонные) ситуации с учетом моментов времени, определяющих управления tj, j=1, …, J, а структура W(Ag) описывает переходы между эталонными ситуациями с помощью отображения множества тактик оператора как руководителя процесса эвакуации.
После инициализации геометрии пространства каждому агенту задается начальная точка, которая соответствует той или иной точке траектории (каюта, ресторан, верхняя палуба). Точки траектории движения присваиваются согласно заданному распределению агентов исходя из сценария моделирования процесса эвакуации («ночной» сценарий подразумевает, что большинство пассажиров находятся на момент начала эвакуации в своих каютах).
Сценарии реализуют с учетом визуального отображения влияния различных компонентов в модели MAC. Среди них выделены следующие сценарии: движение одного агента в условиях, когда на движение влияют только качка и сила отталкивания от препятствий; движение двух агентов навстречу друг другу (при их приближении начинает действовать сила отталкивания); движение нескольких агентов в одном направлении (процесс удержания на параллельных курсах с учетом исключения столкновений); обобщающий сценарий, рассматривающий процесс движения групп агентов в перпендикулярных направлениях.
Блок динамической визуализации 7 содержит визуализатор процессов эвакуации, поддерживающий технологию взаимодействия с процессом мультиагентного моделирования в пакетном и в интерактивном режимах. Интерактивный визуализатор использует язык программирования С# и программные библиотеки: Microsoft XNA Framework 4.0 (программный каркас), Microsoft Surface 2.0 (работа с сенсорным интерфейсом). Функционирование интерактивного визуализатора обеспечивается на основе платформы Microsoft.NET версии 3.5. Для корректной работы приложения используют библиотеки DirectX 9.0.
Интерактивный визуализатор запускается параллельно с программой мультиагентного моделирования и отображает на экране изменение актуального состояния модели во времени (движение агентов за счет изменения их позиции). Доступно несколько режимов запуска: работа визуализатора и моделирование выполняются в одном процессе и в разных процессах с обменом данными. В первом случае моделирование и визуализация образуют одно приложение, во втором блоки работают удаленно: визуализатор - на компьютере руководителя эвакуации с устройствами ввода-вывода (сенсорном столе).
Пакетный визуализатор обеспечивает анализ различных ситуаций по завершении процесса моделирования. Входные данные формируются в процессе моделирования путем записи каждого шага моделирования в текстовый файл. Пакетный визуализатор состоит из скрипта командной строки и набора скриптов на языке Python. Скрипт командной строки считает число файлов с расширением txt в каталоге и записывает его в файл 'counter.dat'. В дальнейшем этот файл считывается python-скриптом с целью определения необходимого числа входных файлов.
Интерфейс визуализации предоставляет возможность выбора сценария моделирования со следующими возможностями: приближение, удаление (масштабирование); отключение и включение слоев карты и агентов; отображение цели агента: локальной (следующий шаг), глобальной (основная цель агента); построение графиков в динамическом режиме, отображение всех имеющихся точек в процессе эвакуации; приостановка и возобновление моделирования; перезапуск.
Генерация сценариев взаимодействия аварийного судна с внешней средой при реализации модели (7) осуществляется на основе структуры формирования альтернативных вариантов, учитывающих различные положения судна относительно генерального направления распространения волн, скорость судна и характеристики качки для заданного сценария аварийной ситуации.
Сравнение и выбор предпочтительной альтернативы ведется с помощью показателя эффективности эвакуации в виде безразмерных характеристик производительности программы мультиагентного моделирования:

где T(Ag) - модельное (внутреннее) время реализации программы поведения агентов в процессе эвакуации; T(Proc) - время вычислений, определяющее результат функционирования системы мультиагентного моделирования в заданной аварийной ситуации:

где t1 - время, затрачиваемое на формирование процедур оценки состояния внешней среды и аварийного судна; t2 - время обработки информации при генерации мультиагентной среды взаимодействия; t3 - время мультиагентного моделирования процесса эвакуации и визуализации результатов для заданного сценария взаимодействия.
Моделирование эвакуации людей с аварийного судна состоит в выполнении процесса эвакуации в виде последовательности генерации различных ситуаций, связанных с реализацией стратегий эвакуации при взаимодействии судна с внешней средой в заданных внешних условиях, и контроле действий экипажа и пассажиров при выборе режимов управления процессом эвакуации.
Функционирование MAC по эвакуации людей с аварийного судна определяется последовательностью преобразования информации блока мультиагентного моделирования (фиг. 3) и функциональных блоков, обеспечивающих поддержание процесса моделирования и визуализации результатов эксперимента с помощью блоков динамической визуализации на основе системы виртуальной реальности.
Взаимодействие блоков MAC со структурами, определяющими реализацию способа контроля мореходности судна, осуществляется в зависимости от особенностей рассматриваемой аварийной ситуации и описывается на основе алгоритма функционирования процесса эвакуации следующим образом.
После включения программного комплекса MAC на основе сигнала о возникновении аварийной ситуации, поступающего от ЭС 3, начинают выполняться циклы моделирования, определяющие процесс эвакуации с аварийного судна при выполнении следующих действий:
Шаг 1. Передача от базы данных ЭС 3 руководителю эвакуации на пульт оператора (ПО) блока 7 сообщения о параметрах внешней среды (волнение, ветер, условия видимости, глубина акватории, скорость и направление течения) и аварийного судна (координаты положения, курс, скорость, нагрузка судна) и готовности к работе.
Шаг 2. Передача от ПО блока 7 начальных параметров внешней среды и аварийного судна в блок 5 генерации среды взаимодействия и формирования модели аварийной ситуации и в блок 6 генерации сценариев эвакуации.
Шаг 3. Передача от ПО блока 7 в базу данных ЭС 3 запроса об особенностях архитектуры и геометрических характеристиках аварийного судна;
Шаг 4. Прием ПО блока 7 от базы данных ЭС 3 сведений об архитектуре и геометрических характеристиках аварийного судна.
Шаг 5. Передача от ПО блока 7 в блоки 5 и 6 сведений о архитектуре и геометрических характеристиках аварийного судна.
Шаг 6. Передача от ПО блока 7 в блок 2 запроса на расчет параметров динамики взаимодействия (перемещений, скоростей и ускорений) в заданной аварийной ситуации на основе математической модели динамики судна блока 2.
Шаг 7. Прием в блок 7 из блока 2 данных о параметрах перемещений, скоростей и ускорений и передача их в блок 6 генерации сценариев взаимодействия.
Шаг 8. Генерация в блоке 6 сценариев взаимодействия для заданных внешних условий и особенностей динамики аварийного судна.
Шаг 9. Моделирование в блоке 5 процесса эвакуации экипажа и пассажиров в заданной аварийной ситуации.
Шаг 10. Динамическая визуализация процесса эвакуации в блоке 7 по результатам моделирования блока 5 с использованием блока динамической визуализации и системы виртуальной реальности 7.
Шаг 11. Оценка эффективности процесса эвакуации в зависимости от условия выполнения требований к времени проведения эвакуации. При выполнении требований результаты контроля передают в блок 12, выводят на ПО 7 с необходимыми разъяснениями, полученными на основе функционирования системы объяснений ЭС 3.
Шаг 12. Документирование с помощью печатающего устройства в блоке 1 результатов эвакуации в рассматриваемой аварийной ситуации, которые передают для хранения в базу данных ЭС 3.
При невыполнении требований к времени проведения процесса эвакуации осуществляется передача сообщения на ПО блока 7 о переходе к новому циклу проведения эвакуации.
Шаг 13. Сброс показаний приборов на пульте 1; передача в блоки 5-7 команды окончания процесса эвакуации.
В результате использования предлагаемого изобретения на базе MAC 8 формируется гибкое информационное пространство, включающее методы мультиагентного моделирования и динамической визуализации, настраиваемые адаптивные автоматизированные циклы проведения процесса эвакуации с учетом особенностей экипажа и пассажиров, их знаний и навыков в процессе эвакуации. Вычислительные операции предусматривают ускорение или замедление текущего времени процессов, характеризующих динамику судна на волнении в зависимости от заданного масштаба времени.
Преимущество изобретения заключается в том, что функционирование программного комплекса мультиагентного моделирования в максимальной степени приближено к имитации реальных динамических сцен эвакуации с аварийного судна, находящегося в условиях нерегулярной качки, что позволяет повысить эффективность использования предлагаемого способа при обучении судоводителей методам принятия решений в экстремальных ситуациях.
Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф, использующий способ контроля мореходности судна, основанный на измерении периода бортовой качки и определения расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки носом и кормой, кажущийся период волны, курсовой угол и скорость судна на нерегулярном волнении, а также угловые перемещения относительно поперечной и вертикальной осей, линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей, глубину воды под килем на миделе судна, устанавливают фактор, характеризующий наличие мелководья, и в зависимости от этого фактора определяют фактическую метацентрическую высоту и скоростной режим, обеспечивающий безопасность эксплуатации судна, отличающийся тем, что при возникновении аварийных ситуаций, связанных с ухудшением мореходных качеств на базе критериальных уравнений, осуществляется управление процессом эвакуации в условиях нерегулярной качки на основе аппаратно-программных средств, реализующих мультиагентную технологию с помощью сенсорной системы, позволяющей во время имитации движения экипажа и пассажиров по заданному маршруту инициировать реакцию виртуальных агентов MAC на циклические изменения угловых перемещений, скоростей и ускорений аварийного судна с использованием функциональных блоков генерации агентов и сценариев эвакуации, а также динамической визуализации на цветном графическом дисплее поведения агентов в процессе выполнения заданной коллективной стратегии, причем блоки генерации агентов и сценариев эвакуации взаимосвязаны с блоками моделирования характеристик судна, внешней среды и блоком динамической визуализации, обработка результатов контроля процесса и времени эвакуации осуществляется совместно с блоком оценки действий экипажа и пассажиров на основе экспертной системы.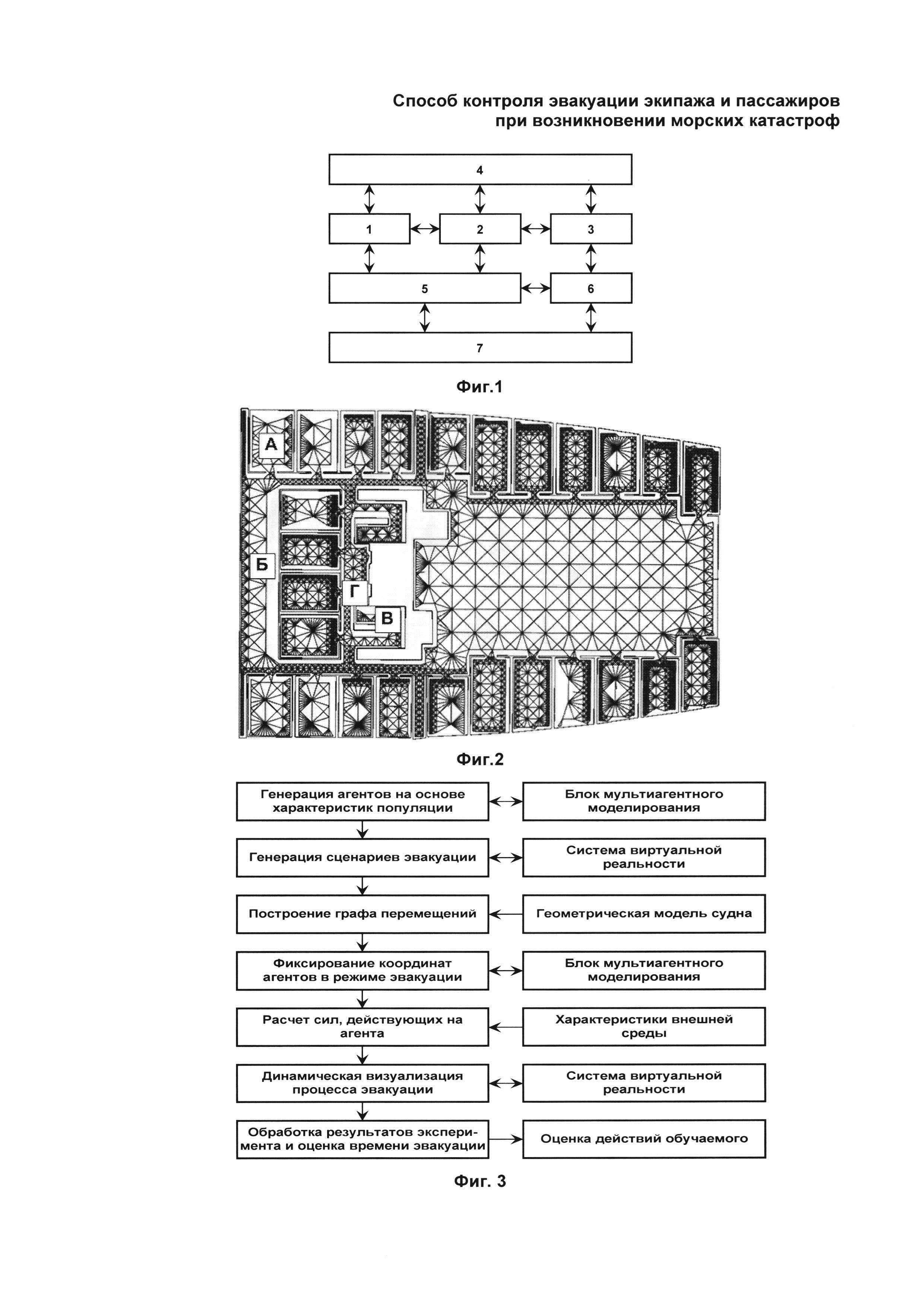
Способ определения коэффициента квадратичной фазовой модуляции сверхкороткого оптического импульса
Способ деперсонализации персональных данных
Волоконно-оптическое устройство для измерения напряженности электрического поля
Способ получения резистивного элемента памяти
Способ оценки степени обогатимости минерального сырья оптическим методом и устройство для его реализации
Способ центрировки линзы в оправе и оправа для его осуществления
Способ центрировки линзы в оправе и оправа для его осуществления
Способ измерения параметров и характеристик источников излучения
Измельчительный механизм волчка
Способ обнаружения объекта на малых дистанциях и устройство для его осуществления
Устройство импульсной защиты от однофазных замыканий на землю воздушных и кабельных линий распределительных сетей 6-35 кв
Способ автоматизированного управления проектированием бортовых интеллектуальных систем
Способ определения поврежденного фидера при замыкании на землю в распределительной сети
Способ контроля непотопляемости судна
Устройство защиты от однофазных замыканий на землю воздушных и кабельных линий распределенных сетей 6-35 кв
Устройство защиты от однофазных замыканий на землю воздушных и кабельных линий распределительных сетей 6-35 кв
Состав для пропитки абразивного инструмента на керамической связке, предназначенного для шлифования плазменных покрытий на никелевой и железной основе
Способ получения сополимеров этилена с винилацетатом
Способ контроля чрезвычайных ситуаций на основе интеграции вычислительных и информационных компонент грид-системы
Способ прогнозирования качки судна при контроле посадки летательных аппаратов в морских условиях

