Результат интеллектуальной деятельности: Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно к способам коррекции угловых параметров, определяемых системой топопривязки и навигации наземного транспортного средства, для их учета в процессе проведения топогеодезических измерений.
Известен способ согласования осей инерциальной навигационной системы с осью наземного транспортного средства и измерительный комплекс для его осуществления (см. патент RU №2436043 С1, опубл. 10.12.11 г., Бюл. №34). Способ согласования осей инерциальной навигационной системы с осью наземного транспортного средства, заключается в том, что на первом этапе производятся регулировочные работы со штатным визиром транспортного средства (ТС), для чего ТС в поле допуска устанавливается на юстировочном участке, вывешивается на домкратах или иных подъемных устройствах, после чего горизонтируется установочная плита, на которой закреплен визир, а затем - собственно сам визир, далее выставляются нулевые отсчеты визира при наведении его на перекрестие юстировочной мишени, установленной таким образом, чтобы ее ось симметрии совпадала с вертикальной плоскостью, проходящей через ось симметрии юстировочного участка, а вертикальное положение было выставлено по отвесу, на втором этапе проводится горизонтирование установочной плиты под инерциальную навигационную систему (ИНС), на третьем этапе производится определение исходных значений «эталонных» углов: азимута Ах (дирекционного угла αх), продольной оси ТС и углов наклона ТС относительно горизонта (углов крена (βк и тангажа γк) после установки ТС на контрольной точке (КТ), его поддомкрачивания с одновременным обеспечением видимости теодолитом удаленного ориентира и зеркала переходной плиты ИНС, с дальнейшим определением с помощью теодолита автоколлимационным способом угла Ат, (αт) между направлением на ориентир и нормалью юстировочного зеркала переходной плиты и вычислением азимута (дирекционного угла) на нормаль зеркала переходной плиты, который в дальнейшем принимается за «эталонное» значение исходного азимута (дирекционного угла) Аэ (αэ), определение с помощью приборов для измерения и установки углов наклона к горизонтальной плоскости, размещаемых на площадке переходной плиты, углов крена и тангажа, которые принимаются за «эталонные» значения (βэ и γэ, на четвертом этапе производится включение и перевод ИНС в режим «Навигация», при котором определяются значения углов Агк (αгк), βгк, γгк, на пятом этапе производится вычисление исходных поправок на угловые показания ИНС для их ввода в бортовой программно - аппаратный комплекс ТС.
Измерительный комплекс содержит визир и навигационную аппаратуру контролируемого транспортного средства, контрольную точку маршрута (испытательной трассы) с известными координатами и азимутом (дирекционным углом) на удаленный на расстояние ориентир. Согласование осей ИНС с осью наземного ТС проводят на измерительном комплексе, включающем в себя следующие сооружения, измерительные и вспомогательные средства: котировочный участок, оборудованный площадкой для ТС в закрытом помещении с твердым напольным покрытием, оснащенным разметкой, для установки ТС, выносной юстировочной мишенью с разметкой на ее поле, внешним источником электропитания для подключения аппаратуры ТС, домкратами или иными подъемными устройствами соответствующей грузоподъемности, приборами для измерения и установки углов наклона к горизонтальной плоскости, отвесом, угломерным измерительным прибором, испытательную трассу для оценки точности определения геодезических данных, оборудованную контрольными точками (КТ) с известным азимутом (дирекционным углом) на удаленный предмет (ориентир), представляющую собой физический предмет (металлический костыль, кол, камень и т.п.) или специальную метку на площадке, обеспечивающую прямую видимость на ориентир.
Недостатками способа, принятого за прототип, являются:
- методологическая сложность согласования линии визирования оптики навигационной аппаратуры и продольной оси наземного транспортного средства;
- высокая трудоемкость и большие временные затраты на проведение котировочных работ.
Предлагаемым изобретением решается задача по повышению эффективности и точности, снижению трудоемкости котировочных работ, проводимых на наземном транспортном средстве, оснащенном системой топопривязки и навигации и оптическим прибором визирования.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа согласования осей линии визирования оптического прибора с продольной осью наземного транспортного средства, обеспечивающего параллельность нулевой линии визирования оптического прибора при нулевой установке шкал угла относительно продольной оси наземного транспортного средства, оснащенного системой топопривязки и навигации.
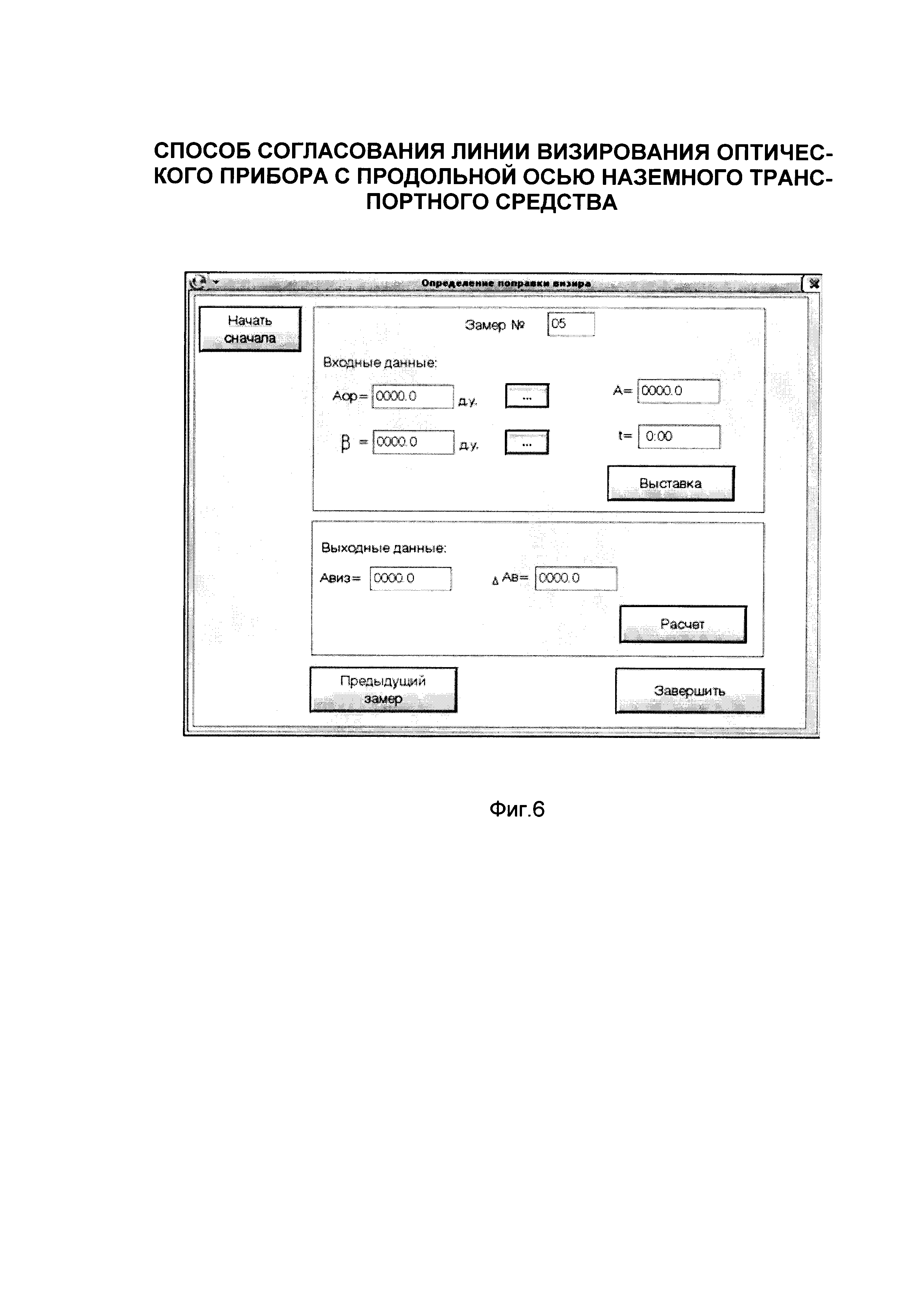
Указанный технический результат достигается тем, что в предлагаемом способе согласования осей линии визирования оптического прибора с продольной осью наземного транспортного средства, заключающемся в том, что транспортное средство устанавливается на юстировочном участке, горизонтируется визир, выставляются его нулевые отсчеты при наведении его на перекрестие котировочной мишени, определяется азимут, вычисляются исходные поправок на угловые показания для их ввода в программно-аппаратный комплекс наземного транспортного средства, новым является то, что после установки наземного транспортного средства на юстировочном участке, определяют его центры на шасси автомобиля и отмечают их рисками, на которых размещают отвесы так, чтобы нити грузов располагались в одной плоскости с продольной осью наземного транспортного средства, при невыполнении данного условия, используя подъемные устройства, вывешивают шасси до совмещения нитей отвесов с плоскостью, юстировочную мишень устанавливают так, чтобы вертикальная плоскость, проходящая через ось симметрии наземного транспортного средства, совпадала с осью симметрии линий наведения его продольной оси на котировочной мишени, вертикальное положение юстировочной мишени выставляют по отвесу, ее высота установки определяется заданным размером установки визира на наземном транспортном средстве, установку мишени производят с помощью перископической артиллерийской буссоли следующим образом: устанавливают буссоль на расстоянии не менее 25 метров между наземным транспортным средством и мишенью, добиваются грубого совмещения линий отвесов с вертикальной линией перекрестия буссоли перемещением треноги, после совмещения фиксируют и горизонтируют положение буссоли, совмещают вертикальную линию перекрестия со створом двух отвесов, устанавливают нулевое положение угломерного механизма буссоли, повертывают буссоль на 180°, наблюдая в окуляр буссоли, устанавливают юстировочную мишень так, чтоб совпадали вертикальные линии перекрестия буссоли и перекрестия линии наведения продольной оси наземного транспортного средства мишени, горизонтируют визир за счет механизма горизонтирования, совмещают перекрестие сетки прибора с перекрестием линий наведения визира на юстировочной мишени, далее выполняют привязку инерциальной навигационной системы к нулевому отсчету визира, как определение исходной поправки угла азимута, определенного с помощью оптического визира для ее учета в специальном программном обеспечении программно-аппаратного комплекса, для этого выбирают задачу «Определение поправки визира», при этом выводится рабочее окно, в котором вводится количество замеров данных, вводится формулярное значение дирекционного угла ориентирного направления АОР и угол ориентирного направления β, определенный с помощью визира, после завершения выставки инерциальной навигационной системы отобразится дирекционный угол, определенный с ее помощью, после проведения расчета, заложенного в алгоритме специального программного обеспечения, на экране появится значения дирекционного угла линии визирования АВИЗ и поправки визира ΔАВ.
Определение центров на шасси автомобиля, на которых размещают отвесы в одной плоскости с продольной осью наземного транспортного средства, позволяет:
- построить воображаемую плоскость, проходящую по оси симметрии наземного транспортного средства;
- облегчить согласование линии визирования оптического прибора с продольной осью шасси.
Проведение установки мишени с помощью перископической артиллерийской буссоли позволяет:
- обеспечить точность проведения котировочных работ;
- повысить в дальнейшем точность определения углового положения наземного транспортного средства.
- использовать буссоль в качестве контрольно-наблюдательного прибора.
Выполнение привязки инерциальной навигационной системы к нулевому отсчету визира, как определение исходной поправки угла азимута, определенного с помощью оптического визира, позволяет:
- обеспечить привязку отсчета инерциальной навигационной системы к нулевому отсчету визира;
- учитывать данную поправку при определении дирекционного угла продольной оси наземного транспортного средства;
- выполнять данную процедуру, как один из этапов калибровки системы топопривязки и навигации, после размещения ее на объекте или после замены, монтажа / демонтажа инерциальной навигационной системы ли визира.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
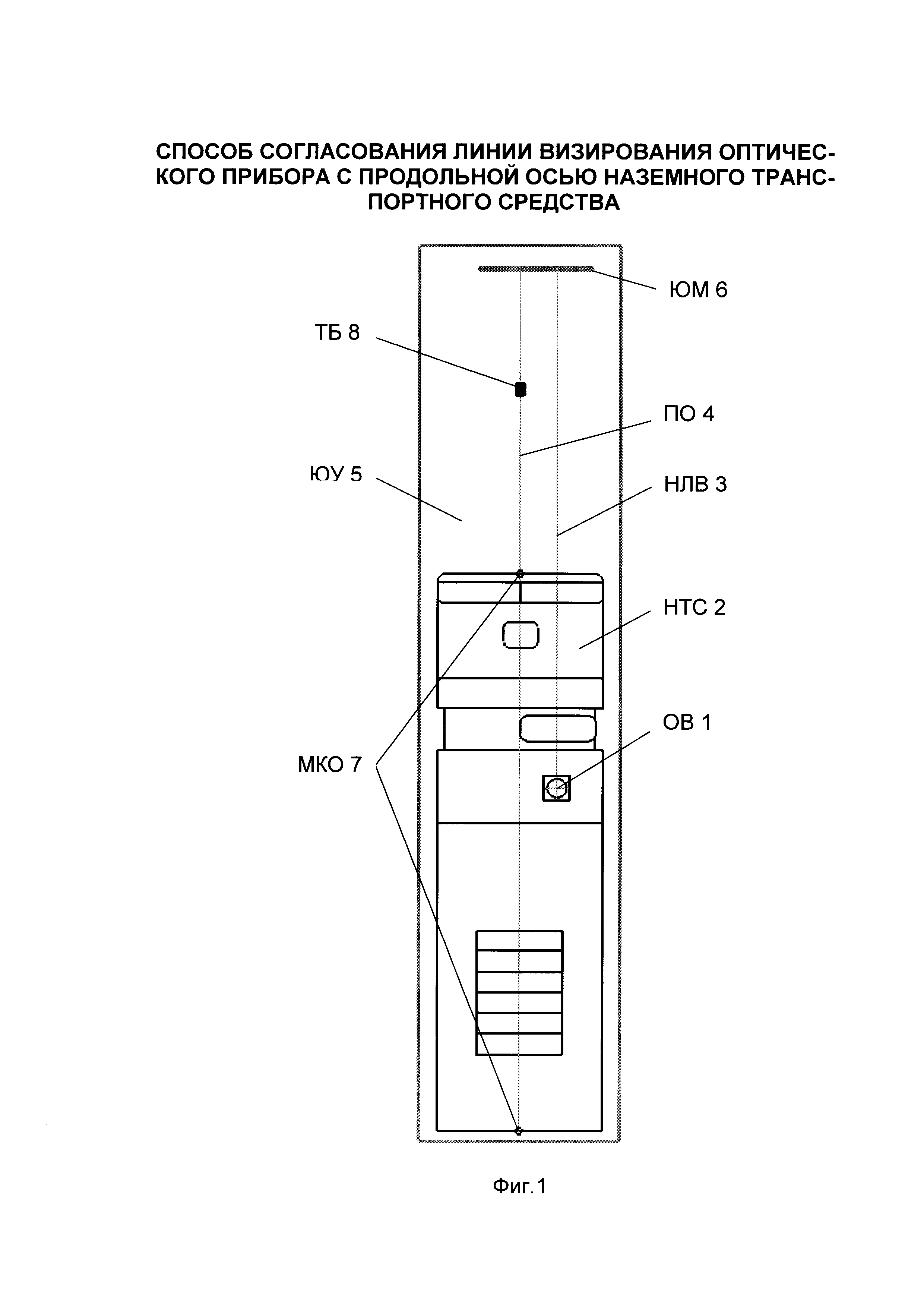
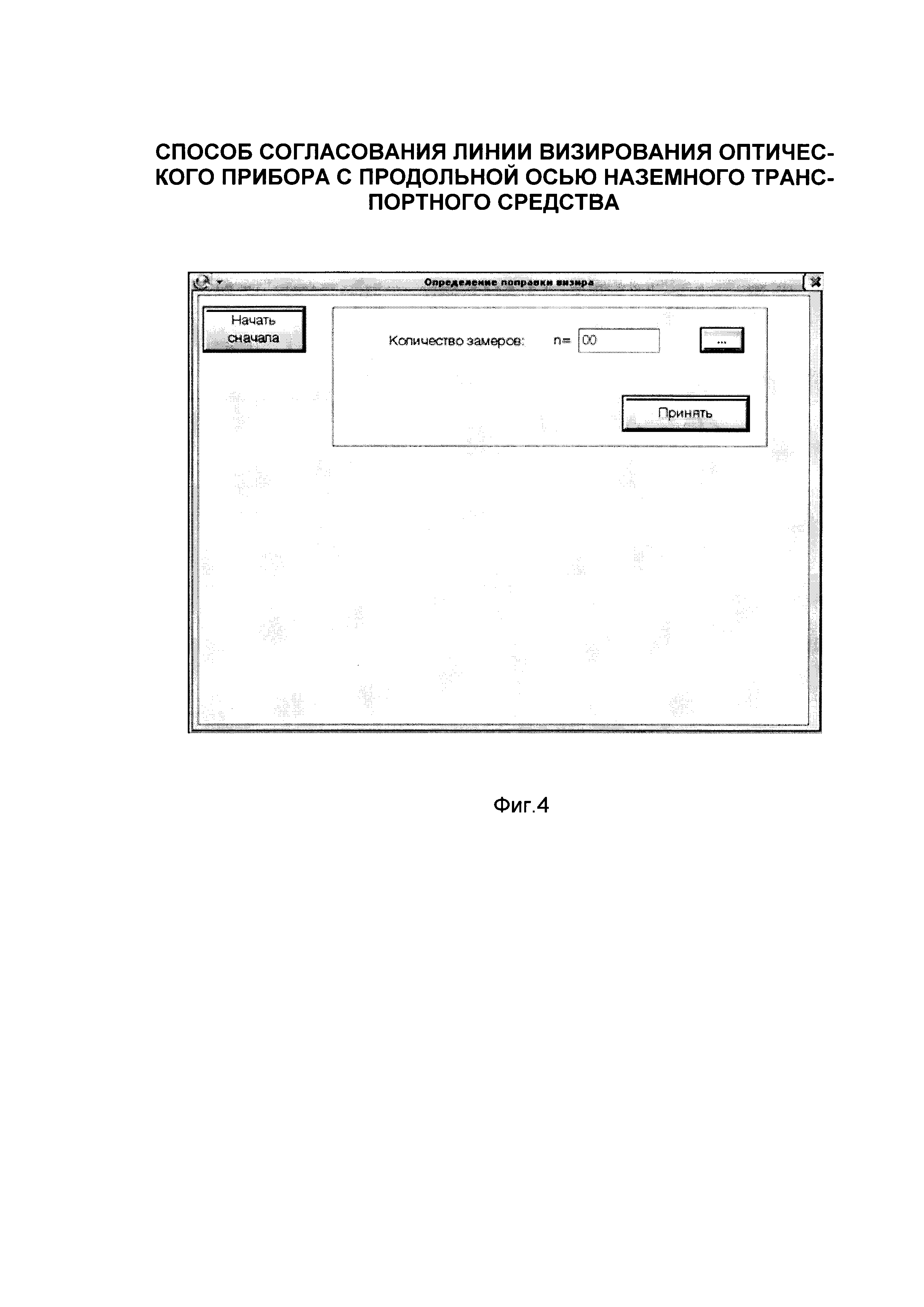
Сущность изобретения поясняется чертежами, где на фиг. 1 показана схема юстировочного участка; на фиг. 2 - схема юстировочной мишени; на фиг. 3 - схема совмещения перекрестия сетки оптического визира с линиями наведения юстировочной мишени; на фиг. 4, фиг. 5, фиг. 6 - рабочие окна задачи «Определение поправки визира» в программно-аппаратном комплексе.
Способ согласования осей линии визирования оптического прибора с продольной осью наземного транспортного средства реализуется следующим образом. Способ устанавливает алгоритм юстировки, регулировки и согласования нулевой линии визирования оптического визира (ОВ) 1 с продольной осью наземного транспортного средства (НТС) 2, оснащенного системой топопривязки и навигации, на котором размещен пункт управления беспилотными летательными аппаратами малой дальности. Нулевая линия визирования (НЛВ) 3 определяется центром перекрестия сетки в поле зрения ОВ 1. В результате юстировки и регулировки обеспечивается параллельность НЛВ 3 ОВ 1 при нулевой установке шкал угла относительно продольной оси (ПО) 4 НТС 2 с погрешностью не более 10 угл. мин. Юстировку и регулировку проводят на юстировочном участке (ЮУ) 5, включающем в себя ровную горизонтальную поверхность по всей длине (не менее 50 м) от места установки НТС 2 до установленной юстировочной мишени (ЮМ) 6. Дополнительно оборудована контрольная точка с известным азимутом (дирекционным углом) на удаленный до 1,5-2 км предмет (ориентир) с допустимой погрешностью не более 1 угл. мин. Контрольная точка представляет собой физический предмет (штырь, кол, камень и т.п.) или специальную метку на площадке с известными координатами, обеспечивающую прямую видимость на ориентир (строение).
НТС 2 устанавливается на ЮУ 5. Путем измерений определяются центры НТС 2 по шасси автомобиля (передний бампер и задняя скалка прицепного крюка) и отмечают их рисками, как места крепления отвесов (МКО) 7. На отмеченных рисках размещают отвесы таким образом, чтоб нити грузов располагались в одной плоскости с продольной осью ПО 4 НТС 2 и были видны в окуляр установленной технологической буссоли (ТБ) 8. Если подвесные нити отвесов находятся не в плоскости НТС 2, то используя штатные аутригеры, входящие в состав НТС 2, транспортное средство вывешивается до совмещения нити отвесов в одну плоскость, исключив при этом его качание за счет амортизаторов и рессор. Устанавливают ЮМ 6 таким образом, чтобы вертикальная плоскость, проходящая через ось симметрии НТС 2, совпадала с осью симметрии линий наведения (ЛН) 9 ПО 4 НТС 2 на ЮМ 6. Вертикальное положение ЮМ 6 выставляется по отвесу. Высота установки ЮМ 6 определяется заданным размером установки ОВ 1 на НТС 2. Установку мишени производится с помощью ТБ 8. ТБ 8 устанавливается на расстоянии не менее 25 метров между НТС 2 и ЮМ 6. Добиваются грубого совмещения линий отвесов с вертикальной линией перекрестия ТБ 8 перемещением треноги вправо или влево, после совмещения положение ТБ 9 фиксируется. Далее ТБ 8 горизонтируется. Используя механизмы вертикальной и горизонтальной наводки ТБ 8, совмещают вертикальную линию перекрестия со створом двух отвесов. Вращением подвижных шкал грубой и точной наводки ТБ 8 устанавливают нулевое положение и удостоверяются, что наводка ТБ 8 при этом не сбилась. Потом отжав стопор точной настройки, ТБ 8 поворачивают на 180°. Наблюдая в окуляр ТБ 8, устанавливают ЮМ 6 таким образом, чтобы совпадали вертикальные линии перекрестия буссоли и перекрестия ЛН 9 ПО 4 НТС 2 мишени. Проводится контроль выставки ЮМ 6.
Горизонтируется ОВ 1 за счет механизмов горизонтирования. Поворотом угломерного механизма и механизма отражателя ОВ 1 совмещается перекрестие сетки прибора с перекрестием ЛН 10 ОВ 1 на ЮМ 6. По окончании согласования отсчеты по шкалам угломерного механизма и механизма отражателя должны иметь нулевые установки 0-00. Если этого нет, то необходимо произвести дополнительную настройку ОВ 1.
Далее выполняют привязку инерциальной навигационной системы к нулевому отсчету ОВ 1, как определение исходной поправки угла азимута, определенного с помощью ОВ 1 для ее учета в специальном программном обеспечении программно-аппаратного комплекса НТС 2. Данная задача выполняется как один из этапов калибровки системы топопривязки и навигации после размещения ее на объекте или после замены, монтажа/демонтажа инерциальной навигационной системы или ОВ 1. При выполнении задачи «Определение поправки визира» выводится рабочее окно, в котором вводится количество замеров данных (не менее четырех) для определения поправки и нажимается кнопка «Принять». В появившемся окне вводится формулярное значение дирекционного угла ориентированного направления АОР, и угол ориентированного направления β, определенный с помощью ОВ 1. Нажимается кнопка «Выставка», начинается обратный отсчет времени, по истечении которого отобразится дирекционный угол А, определенный с помощью инерциальной навигационной системы. После нажатия кнопки «Расчет», на экране появятся значения дирекционного угла линии визирования АВИЗ и поправки визира ΔАВ. Далее нажимается кнопка «Следующий замер», повторяется описанное выше для других ориентированных направлений. При нажатии кнопки «Предыдущий» происходит возврат к предыдущему замеру для возможности проверки правильности ввода данных и, при необходимости, их коррекции с проведением повторного замера. При нажатии кнопки «Начать сначала» происходит возврат в начало задачи «Определение поправки визира». Для вычисления поправки визира в окне последнего замера нажимается кнопка «Завершить», переходят в окно «Поправки». Для установки определенной поправки АВИЗ в качестве формулярного значения необходимо нажать кнопку «Принять».
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа согласования осей линии визирования оптического прибора с продольной осью наземного транспортного средства, обеспечивающего параллельность нулевой линии визирования оптического прибора при нулевой установке шкал угла относительно продольной оси наземного транспортного средства, оснащенного системой топопривязки и навигации.
Способ согласования осей линии визирования оптического прибора с продольной осью наземного транспортного средства, заключающийся в том, что транспортное средство устанавливается на юстировочном участке, горизонтируется визир, выставляются его нулевые отсчеты при наведении его на перекрестие юстировочной мишени, определяется азимут, вычисляются исходные поправок на угловые показания для их ввода в программно-аппаратный комплекс наземного транспортного средства, отличающийся тем, что после установки наземного транспортного средства на юстировочном участке определяют его центры на шасси автомобиля и отмечают их рисками, на которых размещают отвесы так, чтобы нити грузов располагались в одной плоскости с продольной осью наземного транспортного средства, при невыполнении данного условия, используя подъемные устройства, вывешивают шасси до совмещения нитей отвесов с плоскостью, юстировочную мишень устанавливают так, чтобы вертикальная плоскость, проходящая через ось симметрии наземного транспортного средства, совпадала с осью симметрии линий наведения его продольной оси на юстировочной мишени, вертикальное положение юстировочной мишени выставляют по отвесу, ее высота установки определяется заданным размером установки визира на наземном транспортном средстве, установку мишени производят с помощью перископической артиллерийской буссоли следующим образом: устанавливают буссоль на расстоянии не менее 25 метров между наземным транспортным средством и мишенью, добиваются грубого совмещения линий отвесов с вертикальной линией перекрестия буссоли перемещением треноги, после совмещения фиксируют и горизонтируют положение буссоли, совмещают вертикальную линию перекрестия со створом двух отвесов, устанавливают нулевое положение угломерного механизма буссоли, повертывают буссоль на 180°, наблюдая в окуляр буссоли, устанавливают юстировочную мишень так, чтоб совпадали вертикальные линии перекрестия буссоли и перекрестия линии наведения продольной оси наземного транспортного средства мишени, горизонтируют визир за счет механизма горизонтирования, совмещают перекрестие сетки прибора с перекрестием линий наведения визира на юстировочной мишени, далее выполняют привязку инерциальной навигационной системы к нулевому отсчету визира как определение исходной поправки угла азимута, определенного с помощью оптического визира для ее учета в специальном программном обеспечении программно-аппаратного комплекса, для этого выбирают задачу «Определение поправки визира», при этом выводится рабочее окно, в котором вводится количество замеров данных, вводится формулярное значение дирекционного угла ориентирного направления А и угол ориентирного направления β, определенный с помощью визира, после завершения выставки инерциальной навигационной системы отобразится дирекционный угол, определенный с ее помощью, после проведения расчета, заложенного в алгоритме специального программного обеспечения, на экране появятся значения дирекционного угла линии визирования А и поправки визира ΔА.
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса
Способ изготовления тонкостенных осесимметричных оболочек
Станок универсальный малогабаритный
Исполнительное устройство перемещения
Нутромер
Храповое устройство для стопорения вала
Устройство для закрепления и регулировки прицельного приспособления на оружии
Способ изготовления тонкостенных осесимметричных оболочек
Система для определения и обеспечения показателей надёжности объекта военной техники
Имитатор воздушных целей
Электрическое распределительное устройство
Комплект монтажных частей
Пулемет
Самозарядное вкладное оружие
Ствол для стрельбы пулями с упругими элементами
Расходный материал для фиксации на местности точек специальных топогеодезических сетей
Механизм подачи патронов для автоматического стрелкового оружия с ленточным питанием
Способ доработки серийного транспортного средства, оснащенного кузовом-фургоном, в специальное транспортное средство и установочный комплект для такой доработки
Топопривязчик
Локальная система терморегулирования воздуха зоны автоматизированных рабочих мест операторов мобильного информационно-аналитического комплекса вооружений

