Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА КОРРЕКЦИИ ЦИФРОВОЙ МОДЕЛИ
Вид РИД
Изобретение
Уровень техники
Изобретение относится к общей области усовершенствования систем, работа которых основана на использовании цифровой модели, по меньшей мере один параметр которой зависит от измерения, производимого датчиком.
Действительно, часто во время измерения датчики проявляют определенную инерцию, характерную для каждого датчика, которая зависит, в частности, от массы или от размера датчика. Эта инерция выражается во временном смещении между моментом, когда датчик производит измерения, и моментом, когда он выдает сигнал в ответ на это измерение. При этом говорят также об «эффекте запаздывания».
Для устранения этого недостатка, как известно, инерцию датчика моделируют при помощи фильтра, рассчитываемого по постоянной времени, моделирующей время реагирования датчика, то есть его инерцию.
В рамках этих методов, описанных, в частности, в документе US 5,080,496, используют фиксированные таблицы, и они являются сложными в применении, в частности, когда постоянная времени датчика зависит от окружающей среды его использования или когда постоянная времени датчика может сильно меняться от одного датчика к другому.
В документе WO 2010/067009 представлен способ коррекции сигнала измерения, выдаваемого температурным датчиком, позволяющий компенсировать эффект запаздывания, проявляемый этим датчиком, при любой постоянной времени этого датчика.
Этот метод использует цифровую модель температуры, измеряемой датчиком. Однако погрешности в этой модели могут привести к переоценке или к недооценке изменения температуры во время механического переходного периода, пока измерение температуры не стабилизируется в одном значении.
Изобретение призвано устранить этот недостаток.
Раскрытие изобретения
Для решения этой задачи изобретением предложен способ коррекции базовой цифровой модели, содержащий:
- этап обнаружения стабильного состояния по меньшей мере одного первого параметра этой модели, причем этот первый параметр характеризует сигнал, выдаваемый датчиком;
- этап получения параметра коррекции этой модели во время стабильного состояния первого параметра в зависимости от первого параметра, от второго параметра модели и от базовой цифровой модели; и
- этап получения модели, скорректированной на основании базовой цифровой модели и параметра коррекции.
Таким образом, в целом изобретением предложено автономное решение для автоматической коррекции цифровой модели на измерении сигнала, выдаваемого датчиком, когда оно стабилизируется и больше не подвержено влиянию погрешности, связанной с его запаздыванием.
В частном варианте осуществления заявленный способ коррекции содержит:
- предварительный этап разбивки области возможных значений второго параметра на множество диапазонов;
- этап определения и сохранения в памяти диапазона, в котором находится второй параметр во время стабильного состояния первого параметра;
- этап вычисления или оценки локального значения коррекции и присвоения этого локального значения по меньшей мере одному из этих диапазонов;
- при этом указанный параметр коррекции получают на основании локальных значений коррекции и текущего значения указанного второго параметра.
Этот частный вариант осуществления позволяет разбить базовую цифровую модель на дискретные значения в зависимости от второго параметра, присваивая каждому из диапазонов, определяемых этими дискретными значениями, единое значение коррекции для всего диапазона.
В частном варианте осуществления изобретения локальное значение коррекции, присваиваемое одному из диапазонов, является значением, присваиваемым другому диапазону, причем этот другой диапазон определяют на основании таблицы истинности.
Этот частный вариант осуществления позволяет противостоять ситуации, в которой локальные значения коррекции были присвоены не всем диапазонам.
В частном варианте осуществления заявленный способ содержит, по меньшей мере для части области возможных значений второго параметра, этап интерполяции параметра коррекции на основании по меньшей мере одного из локальных значений коррекции.
В этом варианте осуществления точность интерполяции можно легко повысить за счет увеличения числа вышеупомянутых диапазонов.
В частном варианте осуществления заявленный способ коррекции применяют в турбореактивном двигателе один раз за полет и после этапа определения диапазона, в котором находится второй параметр, он содержит этап сохранения в энергонезависимой памяти, связанной с этим диапазоном, второго параметра и локального значения коррекции.
Этот вариант осуществления обеспечивает автоматическую коррекцию модели достаточно часто для коррекции модели от эффектов, связанных с уходом во времени, в частности в случае старения турбореактивного двигателя.
Сохранение в памяти коэффициентов усиления от одного полета к другому обеспечивает оптимизированную компенсацию уже при первом переходном периоде.
В частном варианте осуществления модель представляет собой правило коэффициента усиления, которое дает соотношение между двумя температурами на двух разных ступенях турбореактивного двигателя в зависимости от скорости вращения вентилятора турбореактивного двигателя, при этом первым параметром является одна из указанных температур, а вторым параметром является указанная скорость вращения.
В этом варианте осуществления настоящее изобретение представляет собой усовершенствование метода, описанного в документе WO 2010/067009.
В частном варианте осуществления заявленный способ коррекции содержит этап вычисления скорректированного значения первого параметра на основании текущего значения первого параметра и скорректированной модели.
В частном варианте осуществления этап сохранения в памяти диапазона, в котором находится второй параметр, осуществляют при условии положительного результата этапа проверки состояния после запуска турбореактивного двигателя. Это позволяет убедиться в точности измерения.
В частном варианте осуществления заявленный способ коррекции содержит этап сглаживания параметра коррекции.
Соответственно, объектом изобретения является система коррекции базовой цифровой модели, содержащая:
- модуль обнаружения стабильного состояния по меньшей мере одного первого параметра модели, причем этот первый параметр характеризует сигнал, выдаваемый датчиком;
- модуль получения параметра коррекции этой модели во время стабильного состояния первого параметра в зависимости от первого параметра, от второго параметра модели и от базовой цифровой модели; и
- модуль получения модели, скорректированной на основании базовой цифровой модели и параметра коррекции.
Как было указано выше, с учетом вышеупомянутых отличительных признаков и преимуществ изобретение находит свое предпочтительное, но не ограничительное применение в области авиации и, в частности, в области регулирования и управления авиационными двигателями.
Таким образом, объектом изобретения является также турбореактивный двигатель, содержащий систему коррекции базовой цифровой модели в соответствии с изобретением.
Объектом изобретения является также использование вышеупомянутого способа коррекции, в котором для регулирования турбореактивного двигателя используют первый параметр скорректированной модели вместо первого параметра, характеризующего сигнал, выдаваемый датчиком, причем этот выдаваемый датчиком сигнал используют только для коррекции базовой модели и для получения скорректированной модели.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания не ограничительного примера со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - цифровая модель, которую можно корректировать при помощи заявленных системы и способа.
Фиг. 2 - схема системы коррекции согласно частному варианту выполнения изобретения.
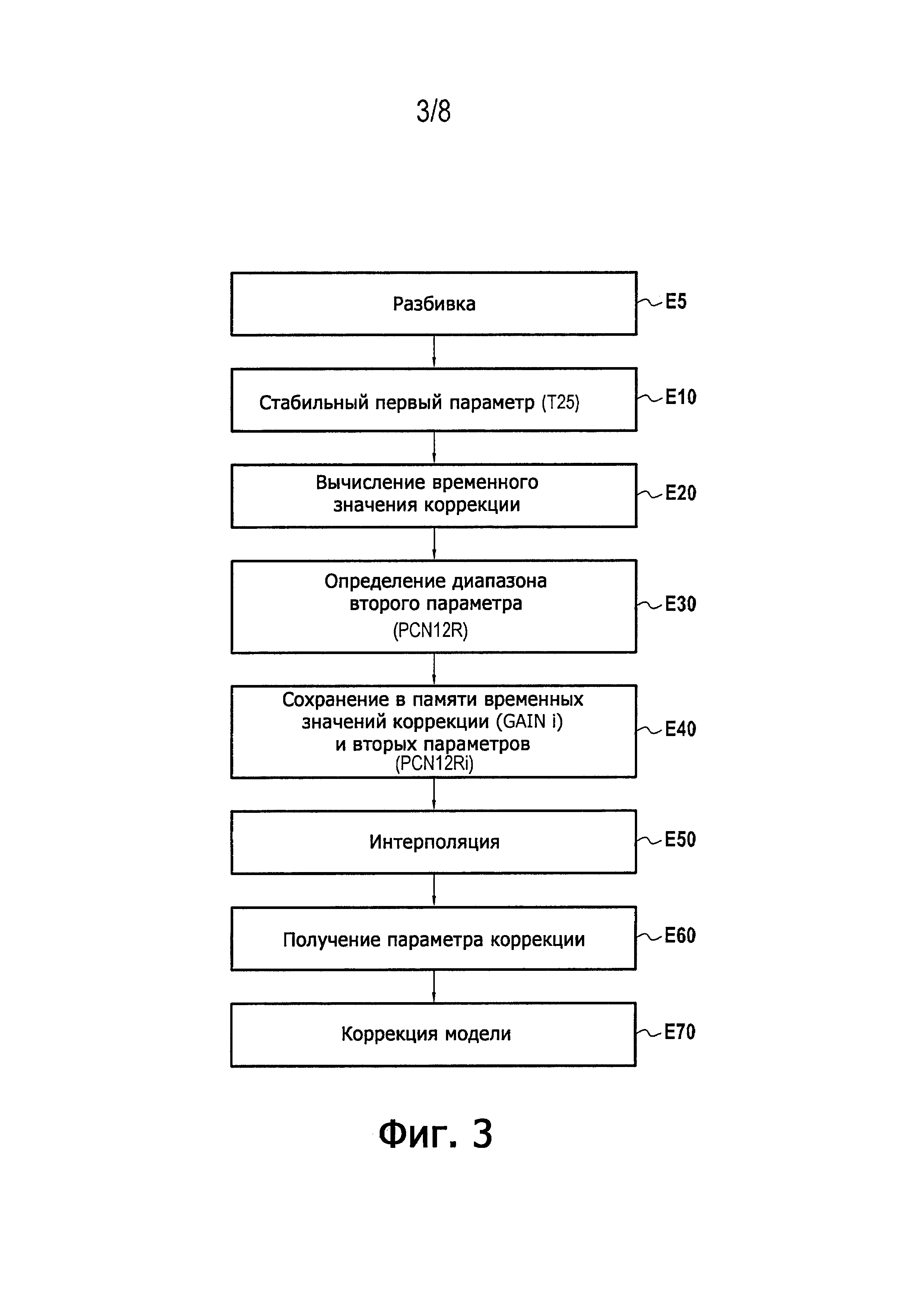
Фиг. 3 - блок-схема основных этапов способа коррекции согласно частному варианту осуществления.
Фиг. 4 - схема модуля обнаружения стабильного состояния, который можно использовать в системе, показанной на фиг. 2.
Фиг. 5 - схема модуля обнаружения стабильного состояния, который можно использовать в системе, показанной на фиг. 2, для обнаружения и сохранения в памяти диапазона второго параметра.
Фиг. 6 - таблица истинности, которую можно использовать в системе, показанной на фиг. 2.
Фиг. 7 - схема модуля, который можно использовать в системе, показанной на фиг. 2, для сохранения в памяти локальных значений коррекции.
Фиг. 8 - результат этапа интерполяции в частном варианте осуществления заявленного способа.
Фиг. 9 - схема модуля выбора параметра коррекции, который можно использовать в системе, показанной на фиг. 2.
Осуществление изобретения
Далее следует описание системы и способа коррекции базовой цифровой модели согласно частному способу выполнения изобретения.
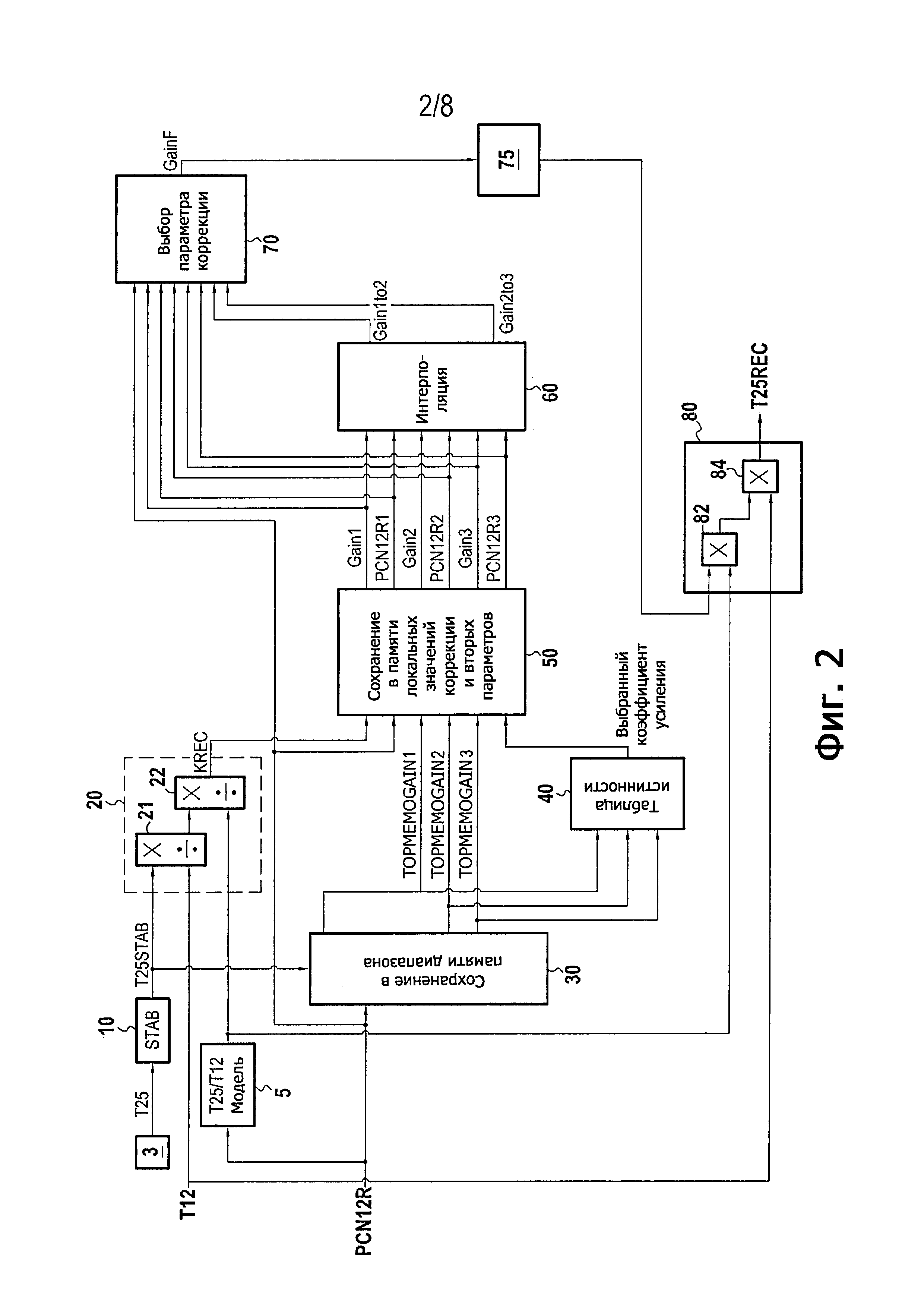
В представленном примере базовой цифровой моделью, которую необходимо скорректировать, является модель правила коэффициента усиления, позволяющая корректировать сигнал измерения Т25, выдаваемый датчиком, имеющим термическую инерцию, и используемый для регулирования турбореактивного двигателя самолета. В частности, как показано на фиг. 1, эта модель позволяет оценить соотношение температур Т25/Т12 в зависимости от скорости PCN12R вращения вентилятора этого турбореактивного двигателя, при этом Т12 обозначает температуру на входе вентилятора и Т25 обозначает температуру на входе компрессора высокого давления турбореактивного двигателя.
В представленном примере осуществления область возможных значений скорости PCN12R (второй параметр в рамках изобретения) разбивают на три диапазона PL1, PL2, PL3. Выбор этих трех диапазонов не является ограничительным, и изобретение можно применять с любым числом диапазонов.
В представленном примере осуществления три диапазона PL1, PL2, PL3 скорости вращения PCN12R являются диапазонами [0; 40], [40; 80], [80,…].
На фиг. 2 и 3 соответственно показаны система коррекции и способ коррекции, при помощи которых можно корректировать базовую цифровую модель, показанную на фиг. 1.
Этап Е5 разбивки области возможных значений скорости вращения вентилятора (второй параметр в рамках изобретения) является предварительным этапом, который можно осуществлять во время тестовой фазы, причем этот этап в основном заключается в выборе соответствующего числа диапазонов и пределов этих диапазонов.
В этом варианте выполнения изобретения система 1, в частности, содержит:
- датчик 3 температуры Т25;
- модуль 10 обнаружения стабильного состояния измерения сигнала, выдаваемого этим датчиком (первый параметр в рамках изобретения);
- модуль 20 вычисления локального значения коррекции;
- модуль 30 определения и сохранения в памяти диапазона, в котором находится второй параметр (скорость вращения вентилятора) во время устоявшегося состояния первого параметра (температура Т25);
- таблицу 40 истинности;
- модуль 50 сохранения в памяти локального значения коррекции и текущего значения второго параметра для каждого из диапазонов;
- модуль 60 интерполяции локальных значений коррекции;
- модуль 70 выбора параметра коррекции на основании локальных значений коррекции и текущего значения второго параметра; и
- модуль 80 коррекции базовой модели в зависимости от параметра коррекции. Соответственно, основными этапами способа коррекции, показанного на фиг. 3,
являются:
- предварительный этап Е5 разбивки области возможных значений второго параметра;
- этап Е10 обнаружения стабильного состояния температуры Т25 (первый параметр в рамках изобретения);
- этап Е20 вычисления локального значения коррекции;
- этап Е30 определения и сохранения в памяти диапазона, в котором находится второй параметр во время устоявшегося состояния первого параметра;
- этап Е40 сохранения в памяти локального значения коррекции и текущего значения второго параметра для каждого из диапазонов;
- этап Е50 интерполяции локальных значений коррекции;
- этап Е60 получения параметра коррекции на основании локальных значений коррекции и текущего значения второго параметра;
- этап Е70 получения модели, скорректированной на основании базовой цифровой модели и параметра коррекции.
В дальнейшем тексте описания рассматриваются сигналы и параметры, разбиваемые на дискретные значения с периодом дискретизации Те. Этот период дискретизации составляет, например, 20-40 мс.
Вместе с тем, следует отметить, что изобретение можно применять также и для непрерывных сигналов и параметров.
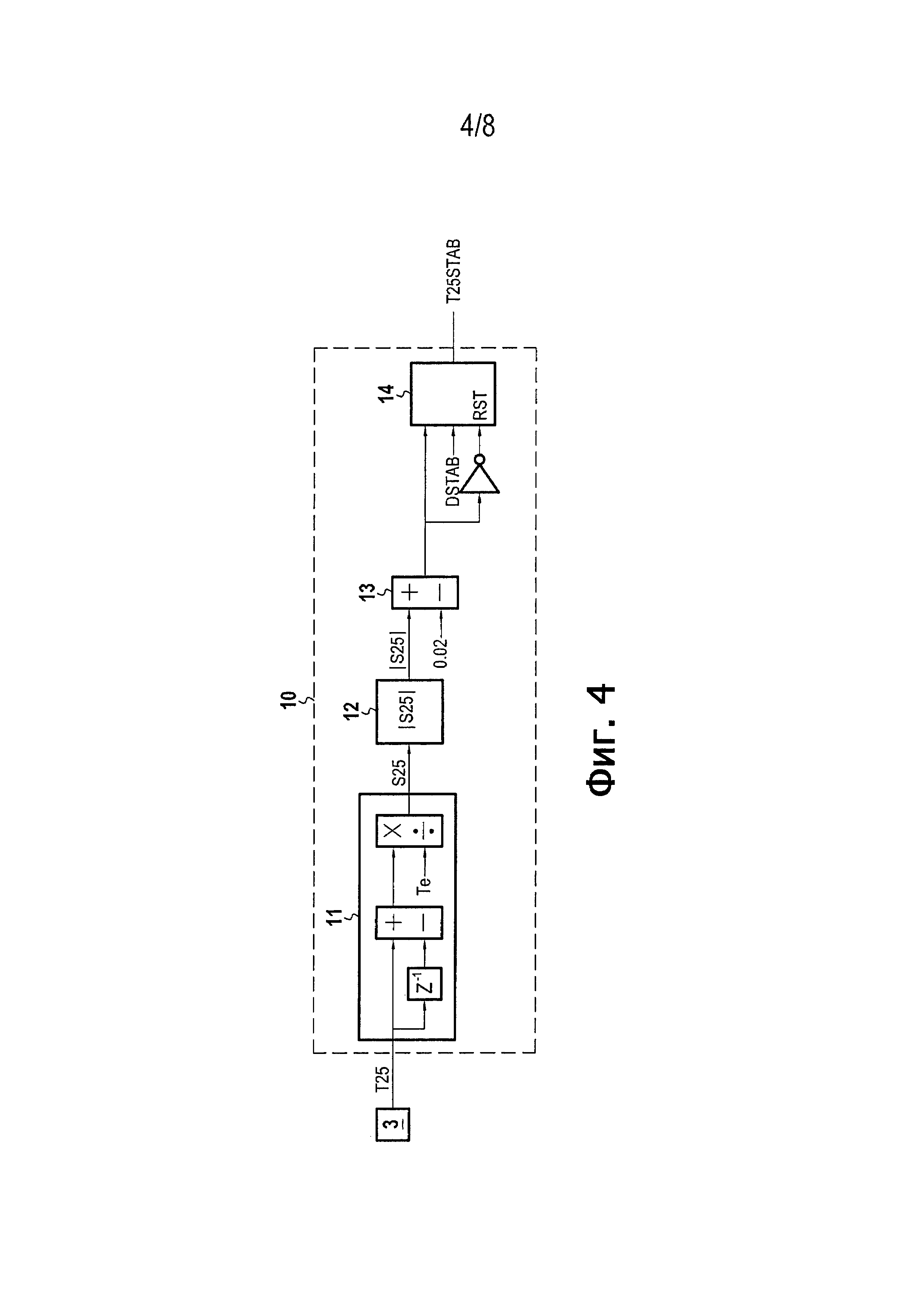
На фиг. 4 представлен частный вариант выполнения модуля 10 обнаружения стабильного состояния первого параметра.
В представленном примере модуль 10 принимает на входе сигнал измерения Т25, выдаваемый датчиком 3, и выдает на выходе сигнал T25STAB, когда измерение находится в стабильном состоянии по меньшей мере по истечении заранее определенного времени стабилизации DSTAB, например, порядка 5 с.
В представленном частном варианте выполнения этот модуль 10 содержит:
- дифференцирующий модуль 11, который принимает на входе сигнал измерения Т25 и выдает на выходе сигнал S25, полученный путем дифференцирования сигнала измерения Т25. В представленном варианте выполнения модуль 11 дифференцирования содержит задерживающий элемент, выдающий сигнал измерения Т25 в момент (n-l).Te, вычитающий элемент, позволяющий вычитать из сигнала измерения Т25[nТе] задержанный сигнал измерения Т25[(n-1).Те], и делительный элемент, выполненный с возможностью деления полученной таким образом суммы на период дискретизации Те. В этом варианте выполнения модуль 11 дифференцирования является фильтром первого порядка. В варианте модуль 11 дифференцирования может быть фильтром более высокого порядка;
- модуль 12 вычисления, выполненный с возможностью определения абсолютной величины [S25] дифференцированного сигнала S25;
- модуль 13 сравнения, выполненный с возможностью сравнения абсолютной величины [S25] с порогом, близким к 0, например 0,02, чтобы обнаружить фазу стабильности измерения; и
- счетчик 14 заранее определенного времени стабилизации DSTAB, устанавливаемый в исходное положение, как только измерение не находится в фазе стабильности.
Показанная на фиг. 3 заявленная система 1 содержит модуль 20 вычисления локального значения коррекции KREC.
В представленном варианте выполнения этот модуль содержит:
- первый делительный элемент 21, выполненный с возможностью определения соотношения Т25/Т12, когда температура Т25 на входе компрессора высокого давления стабилизировалась; и
- второй делительный элемент 22, выполненный с возможностью определения локального значения коррекции KREC на основании этого соотношения Т25/Т12 и при помощи модуля 5, применяющего базовую модель, описанную выше со ссылками на фиг. 1.
В представленном варианте выполнения заявленные система и способ коррекции присваивают это локальное значение коррекции KREC Gain1, Gain2, Gain3 по меньшей мере одному из диапазонов PL1, PL2, PL3, определенных на предварительном этапе разбивки. Локальное значение коррекции, связанное с диапазоном PLi, имеет также обозначение Gaini.
Для этого заявленный способ содержит этап Е30 определения и сохранения в памяти диапазона, в котором находится второй параметр во время стабилизированного состояния первого параметра.
Соответственно, система 1 содержит модуль 30 для определения и сохранения в памяти диапазона, в котором находится второй параметр во время стабилизированного состояния первого параметра.
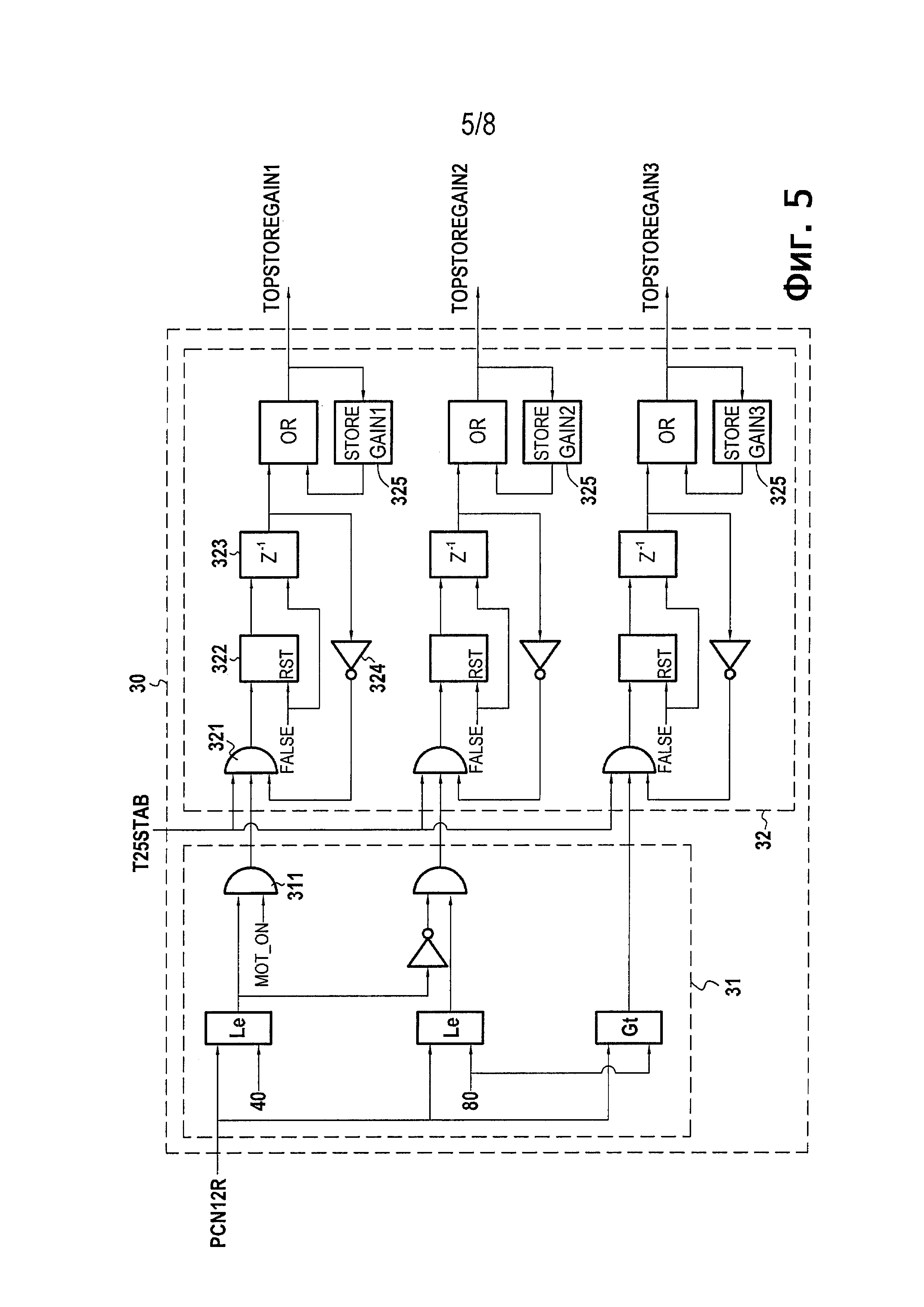
Частный вариант выполнения этого модуля 30 представлен на фиг. 5.
В представленном примере модуль 30 принимает на входе сигнал PCN12R, характеризующий скорость вращения вентилятора (второй параметр в рамках изобретения), идентифицирует диапазон коэффициента усиления в соответствии с моделью, показанной на фиг. 1, и сохраняет эту информацию в энергонезависимой памяти 325.
В частности, модуль 30 содержит первый каскад 31, позволяющий определить диапазон, в котором находится скорость PCN12R вращения вентилятора, среди диапазонов PL1-PL3 ([0; 40], [40; 80], [80,…]), и второй каскад 32, позволяющий сохранить в энергонезависимой памяти 325 информацию, в соответствии с которой для этого диапазона в память была записана пара (локальное значение коррекции, скорость вращения вентилятора).
Согласно отличительному признаку в этом варианте выполнения первый порт И первого каскада 31 получает на входе сигнал MOT_ON, при этом значение ВЕРНО этого сигнала отображает тот факт, что турбореактивный двигатель запущен. Это дополнительное условие для сохранения в памяти диапазона коэффициента усиления проверяется на этапе Е25 заявленного способа. В варианте можно также учитывать другие условия.
В представленном варианте осуществления фазу идентификации диапазона коэффициента усиления осуществляют на каждом цикле полета только один раз за цикл полета. Этот признак, который позволяет повысить надежность коррекции, применяют в варианте выполнения, показанном на фиг. 5, путем размещения инвертора 324 между выходом задерживающего элемента 323 и входом логического порта И 321.
В представленном варианте осуществления сохранение в памяти осуществляют при каждой остановке двигателя при помощи модуля 322, инициализируемого на НЕВЕРНО (FAULSE).
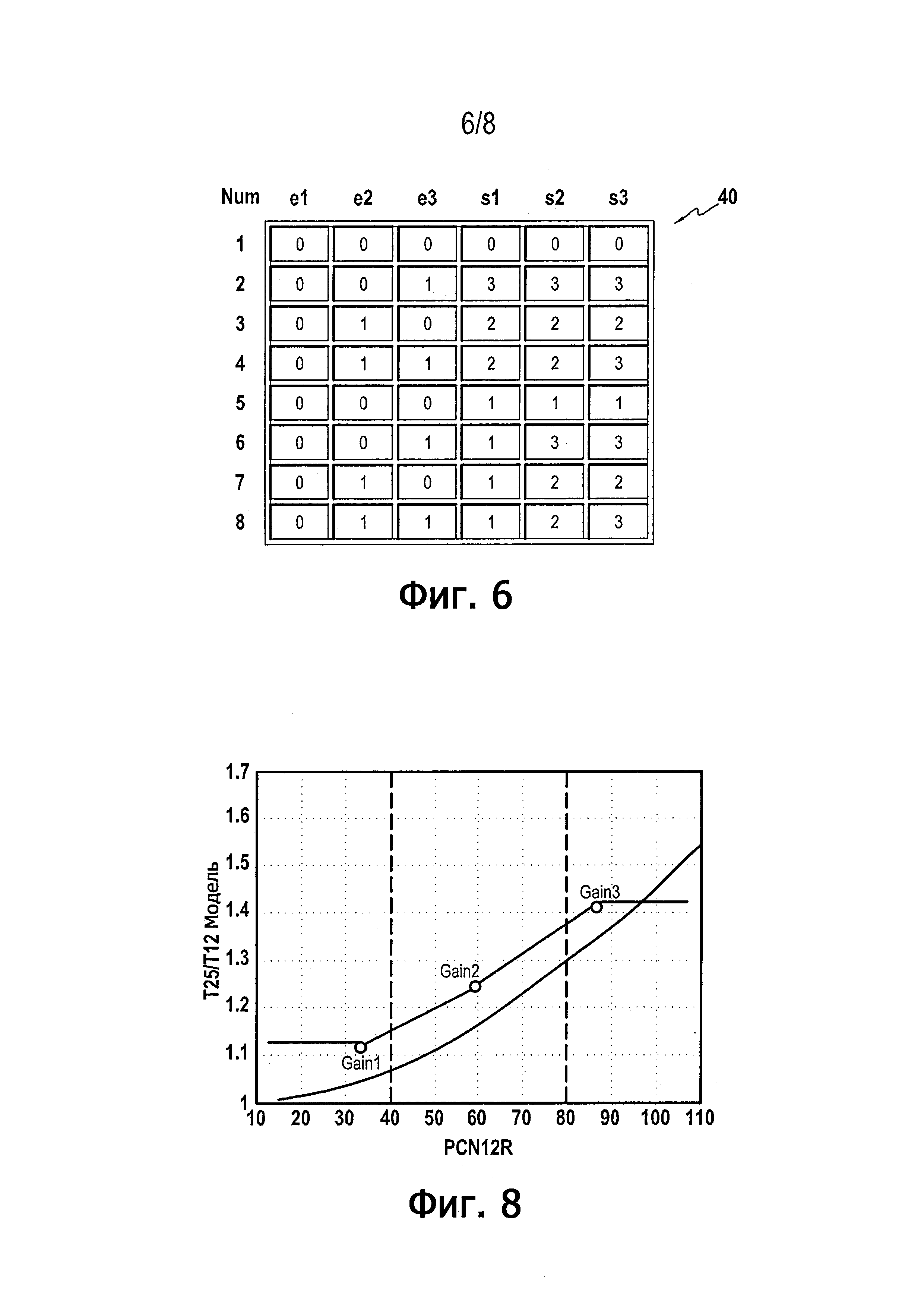
В представленном варианте осуществления заявленная система 1 содержит таблицу 40 истинности, показанную на фиг. 6. Эта таблица истинности позволяет присваивать локальное значение коррекции KREC пока еще не идентифицированному диапазону.
Например, строка 6 отображает ситуацию, в которой локальные значения коррекции Gain1 и Gain3 были присвоены диапазонам PL1 и PL3 в результате обнаружения скорости вращения вентилятора в каждом из этих диапазонов, при этом диапазону PL2 не было присвоено никакое локальное значение. В этом случае с диапазоном PL2 связывают коэффициент усиления Gain3 (Gain2=Gain3). Работа считается нормальной, если для каждого из диапазонов было идентифицировано локальное значение коррекции (таблица истинности 40, строка 8).
Заявленный способ содержит этап Е40 сохранения в памяти локального значения коррекции Gain и значения второго параметра (обозначаемого PCN12Ri) для каждого из диапазонов PLi.
Соответственно, заявленная система 1 содержит модуль 50 сохранения в памяти локального значения коррекции Gaini и значения второго параметра (обозначаемого PCN12Ri) для каждого из диапазонов PLi.
На фиг. 7 представлен пример реализации этого модуля. В этом примере для каждого из диапазонов PLi ([0; 40], [40; 80], [80,…]) используют модуль 52i сохранения в памяти локального значения коррекции (Gaini) и модуль 54i сохранения в памяти второго параметра (скорость вращения вентилятора PCN12Ri). Ниже будут описаны только модули, относящиеся к диапазону PL1.
Модуль 521 сохранения в памяти коэффициента усиления Gain1 и модуль 541 сохранения в памяти скорости вращения вентилятора PCN12R1 принимают на входе сигнал TOPMEMOGAIN1, указывающий, что модуль 40 обнаружил скорость вращения вентилятора PCN12R, входящую в диапазон PL1 ([0; 40]), при этом другие условия сохранения в памяти (стабилизированная температура Т25, запущенный турбореактивный двигатель,…) соблюдены.
В этих условиях диапазону PL1 присваивается вычисленном модулем 20 локальное значение коррекции KREC (соответственно обозначаемое как Gain1), которое сохраняется в памяти в модуле 521. Точно так же, с диапазоном PL1 связывают скорость вращения PCN12R (обозначаемую PCN12R1), которую сохраняют в памяти модуля 541
Как было указано выше, таблица 40 истинности позволяет присвоить значение другого коэффициента усиления Gain2 или Gain3 коэффициенту усиления Gain1, если он не был определен. Для этого выходы Gain2 и Gain3 модулей 522,3 перенаправляют на вход модуля 52 сохранения в памяти коэффициента усиления Gain1.
Таким образом, на этой стадии способа получили локальное значение коррекции (Gaini) для каждого из диапазонов, связанное со значением второго параметра (PCN12Ri - скорость вращения вентилятора).
В представленном варианте осуществления по меньшей мере для части области возможных значений второго параметра PCN12R заявленный способ содержит этап Е50 интерполяции параметра коррекции на основании одного или нескольких локальных значений коррекции.
Точно так же в представленном варианте выполнения заявленная система 1 содержит модуль 60 получения параметра коррекции путем интерполяции локальных значений коррекции. В частности, в представленном примере применяют линейную интерполяцию между Gain1 и Gain2, если PCN12R находится между PCN12R1 и PCN12R2, и линейную интерполяцию между Gain2 и Gain3, если PCN12R находится между PCN12R2 и PCN12R3.
При этом получают:
Gain1to2=Gain1+(Gain2-Gain1).(PCN12R-PCN12R1)/(PCN12R2-PCN12R1)
Gain2to3=Gain2+(Gain3-Gain2).(PCN12R-PCN12R2)/(PCN12R3-PCN12R2)
На фиг. 8 показан результат этапа Е50 интерполяции в частном варианте осуществления заявленного способа. В этом частном варианте осуществления дополнительно используют Gain1 для любой скорости вращения вентилятора ниже PCN12R1 и Gain3 для любой скорости вращения вентилятора сверх PCN12R3.
Параметр коррекции GainF получают (этап Е60) на основании локальных значений коррекции Gain1, Gain2, Gain3 в зависимости от текущего значения второго параметра (скорость вращения вентилятора) PCN12R.
Соответственно, в представленном варианте выполнения заявленная система 1 содержит модуль 70 выбора параметра коррекции на основании локальных значений коррекции в зависимости от текущего значения второго параметра PCN12R.
На фиг. 9 представлен частный вариант выполнения модуля 70 выбора конечного коэффициента усиления GainF. Этот модуль содержит три сравнивающих элемента 72, выполненных с возможностью сравнения скорости вращения вентилятора PCN12R с значениями PCN12R1, PCN12R2 и PCN12R3, соответствующими трем диапазонам коэффициентов усиления и сохраненными в памяти модулем 50.
При этом в зависимости от результата этих сравнений присваивают номер коэффициента усиления NumeroGain.
- NumeroGain=4, если PCN12R2>PCN12R3
- NumeroGain=3, если PCN12R3>PCN12R>PCN12R2
- NumeroGain=2, если PCN12R2>PCN12R>PCN12R1
- NumeroGain=1, если PCN12R1>PCN12R.
Наконец, модуль 70 выбора коэффициента усиления содержит сравнивающий элемент 74, выполненный с возможностью сравнения значения Gain1, Gain1to2, Gain2to3 или Gain3 с конечным коэффициентом усиления GainF в зависимости от номера коэффициента усиления NumeroGain.
Заявленный способ коррекции содержит этап Е70 получения модели, скорректированной на основании базовой цифровой модели 5 и параметра коррекции GainF.
Соответственно, заявленная система 1 содержит модуль 80 коррекции базовой модели 5 в зависимости от конечного коэффициента усиления GainF. В этом варианте выполнения этот модуль в основном представляет собой перемножающий элемент 82.
В представленном варианте выполнения этот модуль 80 дополнительно осуществляет коррекцию температуры Т25 на основании текущей температуры Т12 и скорректированной модели (перемножающий элемент 84). Таким образом, получают скорректированную модель T25REC температуры Т25.
Скорректированная модель T25REC является точной, и в частном варианте выполнения изобретения ее можно использовать вместо температуры Т25, измеряемой датчиком. В этом варианте выполнения датчик 3 используют в конечном счете только во время стабилизированных фаз для коррекции модели.
В представленном варианте выполнения заявленная система 1 содержит делитель градиента, находящийся между выходом модуля 70 выбора коэффициента усиления и входом модуля 80 коррекции базовой модели, чтобы сглаживать переход от одного коэффициента усиления к другому.
В описанном выше варианте выполнения базовая модель, показанная на фиг. 1, является одномерной моделью. Изобретение можно использовать точно так же в случае многомерной модели.
Усиленная прокладка лопатки вентилятора
Угловой держатель оборудования для самолетостроения
Плазменный реактивный двигатель на основе эффекта холла
Устройство для заправки топливом двигателя ракеты-носителя
Турбинный двигатель летательного аппарата, его модуль, часть статора для такого модуля, а также кольцо для такого статора
Устройство и способ позиционирования оборудования с изменяемой геометрией для турбомашины с использованием гидроцилиндра с относительным измерением
Камера сгорания турбомашины, содержащая улучшенные средства питания воздухом
Устройство и способ обнаружения неисправности топливного насоса низкого давления турбореактивного двигателя и турбореактивный двигатель, содержащий упомянутое устройство
Турбина низкого давления газотурбинного двигателя, диск и конусная цапфа турбины низкого давления, газотурбинный двигатель
Стенд и способ контроля посредством магнитной дефектоскопии вала газотурбинного двигателя
Способ и модуль фильтрации грубого заданного значения

