Результат интеллектуальной деятельности: МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП
Вид РИД
Изобретение
Изобретение относится к гироскопам вибрационного типа, в частности к микромеханическим гироскопам, которые предназначены для измерения угловой скорости движения основания.
Известен микромеханический вибрационный гироскоп [RU 2178548 C1, МПК 7 G01C 19/56, опубл. 20.01.2002], содержащий корпус, в котором размещен инерционный элемент, расположенный в рамке, соединенной с корпусом и инерционным элементом посредством двух пар упругих элементов, расположенных по ортогональным осям, являющимся осями угловых перемещений соответственно рамки и инерционного элемента. Датчики угла и датчики момента расположены по осям рамки и инерционного элемента. Выход блока возбуждения колебаний на частоте ω, соединен с датчиком момента по оси инерционного элемента. Первый вход блока стабилизации колебаний на частоте ω соединен с выходом блока возбуждения колебаний на частоте ω. Второй вход блока стабилизации колебаний на частоте ω соединен с датчиком угла по оси рамки. Выходы блока стабилизации колебаний на частоте ω соединены с датчиком момента по оси рамки. Блок возбуждения колебаний на частоте ω выполнен по схеме автогенератора, вход которого соединен с датчиком угла по оси инерционного элемента.
Недостатком этого микромеханического гироскопа является использование схемы автогенератора для возбуждения колебаний, что снижает стабильность масштабного коэффициента микромеханического гироскопа, который определяется стабильностью амплитуды и частоты его первичных колебаний. При изменении температуры окружающей среды будут изменяться характеристики элементов автогенератора, что приводит к уменьшению стабильности амплитуды, частоты первичных колебаний и, как следствие, к уменьшению стабильности масштабного коэффициента микромеханического гироскопа.
Другим недостатком является непрерывная стабилизация первичных колебаний за счет использования автогенератора, что приводит к длительным переходным процессам и снижению быстродействия.
Наиболее близким, принятым за прототип, является микромеханический гироскоп [RU 2279634 C2, МПК G01C 19/56 (2006.01), G01P 9/04 (2006.01), опубл. 10.07.2006], который содержит ротор и статор с первой группой электродов, образующих гребенчатый двигатель по оси возбуждения колебаний и второй группой электродов, расположенных по оси измерения выходного сигнала, емкостной датчик, образованный электродами второй группы и преобразователь емкость - напряжение, систему фазовой автоподстройки частоты, вход которой подключен к выходу емкостного датчика, фильтр низкой частоты, умножитель, первый вход которого соединен с выходом емкостного датчика, фильтр низкой частоты, вход которого соединен с выходом умножителя. Вход выпрямителя подключен к выходу емкостного датчика. Вход интегратора подключен к выходу выпрямителя. Вход фазосдвигающего устройства подключен к выходу емкостного датчика. Входы устройства суммирования подключены к выходам интегратора и фазосдвигающего устройства. Выход устройства суммирования соединен с электродами первой группы. Второй вход умножителя соединен с выходом системы фазовой автоподстройки частоты.
Недостатком такого микромеханического гироскопа является структурная сложность и соответственно низкая надежность работы. Другим недостатком является непрерывная стабилизация первичных колебаний за счет использования системы фазовой автоподстройки частоты, что приводит к длительным переходным процессам и снижению быстродействия. Также при изменении температуры окружающей среды будут изменяться характеристики системы фазовой автоподстройки частоты, что приводит к уменьшению стабильности амплитуды, частоты первичных колебаний и, как следствие, к уменьшению стабильности масштабного коэффициента микромеханического гироскопа.
Изобретение направлено на повышение стабильности масштабного коэффициента микромеханического гироскопа, увеличение быстродействия и повышение надежности работы микромеханического гироскопа.
Микромеханический гироскоп, также как в прототипе, содержит подвижную массу на двухосном резонансном подвесе, неподвижное основание, подвижные и неподвижные электроды, образующие гребенчатый двигатель по оси возбуждения колебаний, подвижные и неподвижные электроды, расположенные по оси измерения выходного сигнала и образующие емкостной датчик, к выходу которого подключена система съема выходной информации, систему возбуждения и стабилизации первичных колебаний.
Согласно изобретению система возбуждения и стабилизации первичных колебаний микромеханического гироскопа содержит подвижные электроды двух конденсаторов гребенчатого двигателя, соединенные в общей точке, к которой последовательно подключены преобразователь ток-напряжение, синхронный детектор, фильтр нижних частот, аналого-цифровой преобразователь и микроконтроллер, который соединен с первым, вторым и третьим цифроаналоговыми преобразователями. Выход первого цифроаналогового преобразователя соединен со вторым входом синхронного детектора. Выход второго цифроаналогового преобразователя через первый усилитель подключен к неподвижным электродам первого конденсатора гребенчатого двигателя. Выход третьего цифроаналогового преобразователя подсоединен через второй усилитель к неподвижным электродам второго конденсатора гребенчатого двигателя.
Использование в микромеханическом гироскопе в системе возбуждения и стабилизации первичных колебаний синхронного детектирования синфазной и квадратурной составляющих в суммарном токе, протекающем через электроды гребенчатого двигателя, с последующим расчетом собственной резонансной частоты первичных колебаний микромеханического гироскопа, позволяет за два такта измерений реализовать возбуждение и стабилизацию первичных колебаний, что увеличивает быстродействие и точность стабилизации частоты первичных колебаний, так как независимо от изменения температуры резонансная частота первичных колебаний рассчитывается математически, что увеличивает стабильность масштабного коэффициента микромеханического гироскопа. Использование одного синхронного детектора и одного аналого-цифрового преобразователя для детектирования синфазной и квадратурной составляющих в суммарном токе и исключение системы ФАПЧ позволило упростить схему, что повышает надежность работы микромеханического гироскопа.
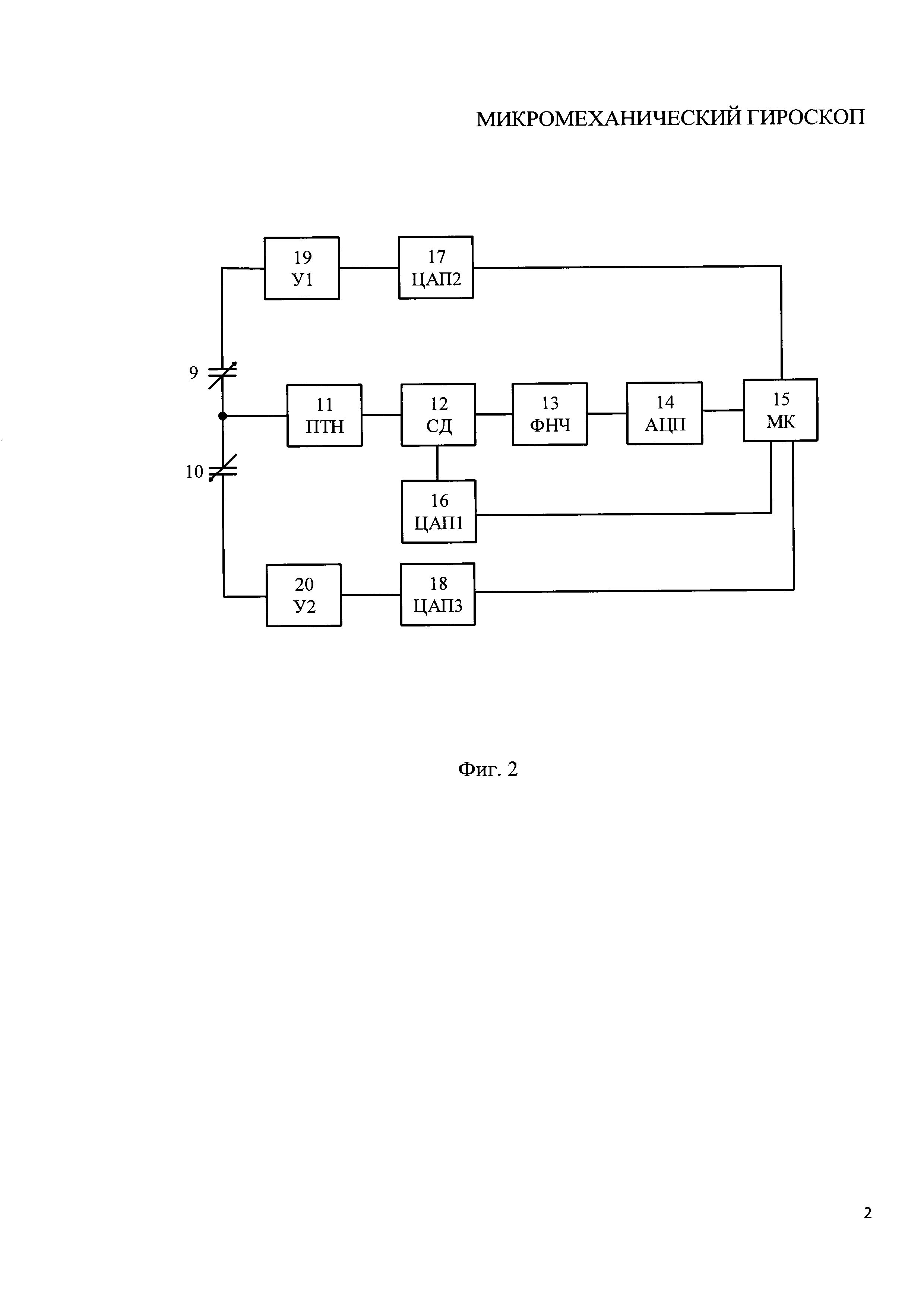
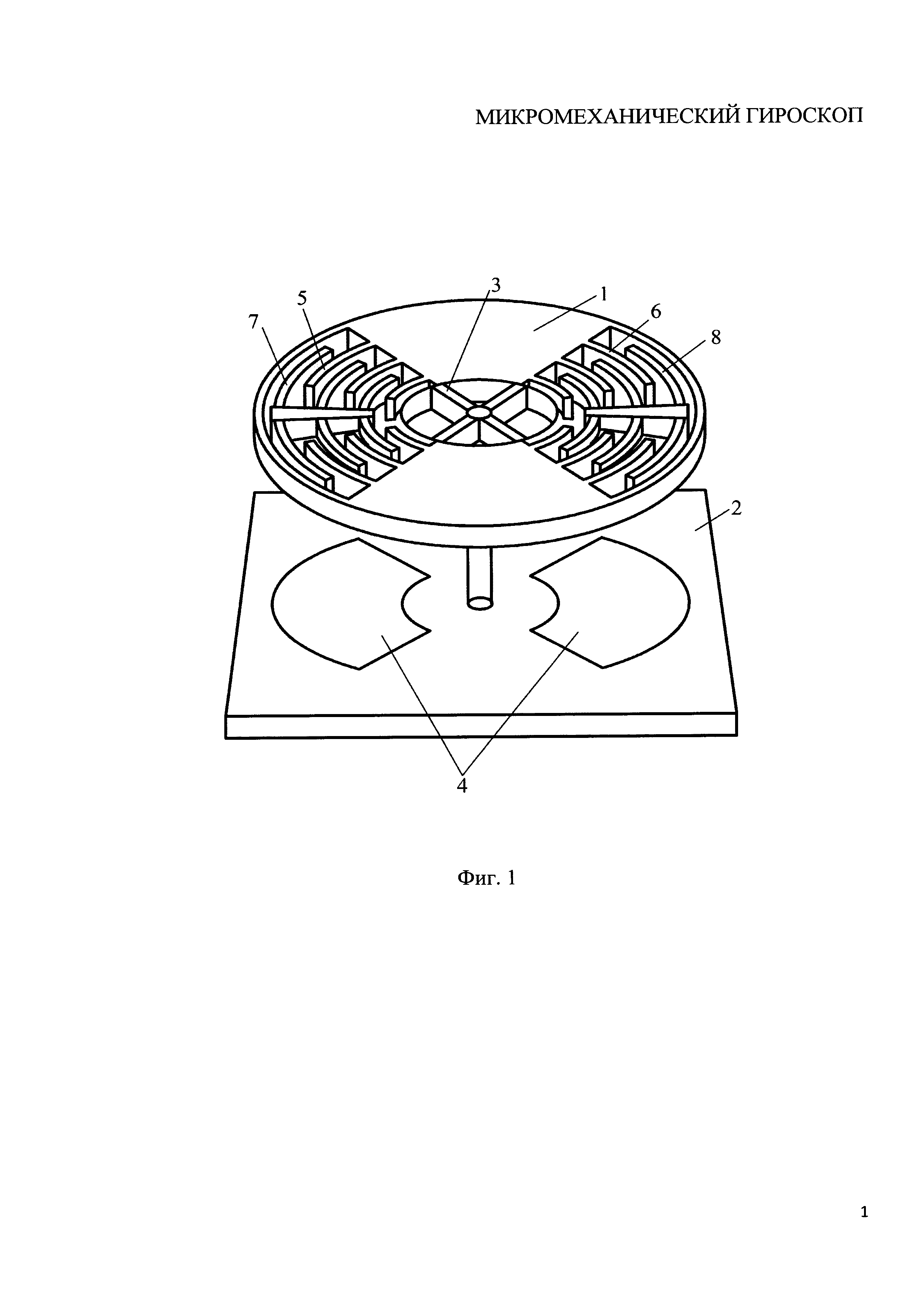
На фиг. 1 изображена конструкция микромеханического микроскопа. На фиг. 2 представлена структурная схема системы возбуждения и стабилизации первичных колебаний микромеханического гироскопа.
Микромеханический микроскоп содержит подвижную массу 1, выполненную в виде диска, который подвижен относительно основания 2 (фиг. 1). Подвижная масса 1 установлена на основании с помощью упругих элементов 3. Упругие элементы 3 жестко прикреплены одними концами к подвижной массе 1, а другими концами - к основанию 2. Упругие элементы 3 размещены в микромеханическом гироскопе с возможностью совершения угловых первичных колебаний подвижной массы 1 вокруг оси Z, перпендикулярной плоскости подвижной массы и вторичных колебаний подвижной массы вокруг осей X и Y в плоскости подвижной массы.
На основании 2 с противоположных сторон закреплены неподвижные электроды 4, образующие с электродами, закрепленными на нижней поверхности подвижной массы 1, плоские конденсаторы, которые являются емкостными датчиками вторичных угловых колебаний подвижной массы 1 относительно основания 2. К выходу емкостного датчика подключена система съема выходной информации (на фиг.1 не показано).
На подвижной массе 1 с двух противоположных сторон выполнены подвижные гребенчатые электроды 5, 6, образующие с неподвижными гребенчатыми электродами 7, 8 соответственно конденсаторы 9, 10 (фиг. 2) электростатического гребенчатого двигателя.
Подвижные электроды 5, 6 конденсаторов 9, 10 гребенчатого двигателя соединены между собой в общей точке, к которой последовательно подключены преобразователь ток-напряжение 11 (ПТН), синхронный детектор 12 (СД), фильтр нижних частот 13 (ФНЧ), аналого-цифровой преобразователь 14 (АЦП) и микроконтроллер 15 (МК). Микроконтроллер 15 (МК) соединен с первым цифроаналоговым преобразователем 16 (ЦАП1), со вторым цифроаналоговым преобразователем 17 (ЦАП2) и с третьим цифроаналоговым преобразователем 18 (ЦАП3). Выход первого цифроаналогового преобразователя 16 (ЦАП1) соединен со вторым входом синхронного детектора 12 (СД). Выход второго цифроаналогового преобразователя 17 (ЦАП2) подсоединен через первый усилитель 19 (У1) к неподвижным электродам 7 конденсатора 9 гребенчатого двигателя. Выход третьего цифроаналогового преобразователя 18 (ЦАП3) подсоединен через второй усилитель 20 (У2) неподвижным электродам 8 конденсатора 10 гребенчатого двигателя микромеханического гироскопа.
Преобразователь ток-напряжения 11 (ПТН) может быть выполнен по типовой схеме преобразователя ток-напряжения на операционные усилители. В качестве синхронного детектора 12 (СД) может использоваться любой аналоговый перемножитель, например, AD734. Фильтр нижних частот 13 (ФНЧ) может быть выполнен по схеме активного фильтра Бесселя нижних частот третьего порядка на частоту среза 0,01 Гц. В качестве аналого-цифрового преобразователя 14 (АЦП) может быть использован любой сигма-дельта аналого-цифровой преобразователь. Может быть использован любой 8-битный микроконтроллер 15 (МК). В качестве цифроаналоговых преобразователей 16 (ЦАП1), 17 (ЦАП2) и 18 (ЦАП3), могут быть использованы любые, 14-битный цифроаналоговые преобразователи с частотой дискретизации не менее чем 100 раз больше частота возбуждения первичных колебаний микромеханического гироскопа. Усилители 19 (У1) и 20 (У2) могут выполнены на любых операционных усилителях, например, ОР270.
Устройство работает следующим образом.
Возбуждение и стабилизация первичных колебаний микромеханического гироскопа осуществляется в два этапа. На первом этапе микроконтроллер 15 (МК) через интерфейс устанавливает выходные параметры первого цифроаналогового преобразователя 16 (ЦАП1) по закону:
Ur1(t)=Urmsin(2ωt),
где Urm - амплитуда напряжения на выходе первого цифроаналогового преобразователя 16 (ЦАП1), В,
ω - частота напряжения, рад/с.
Одновременно микроконтроллер 15 (МК) через интерфейс устанавливает выходные параметры второго цифроаналогового преобразователя 17 (ЦАП2) по закону:
U1(t)=Umsin(ωt)+U0,
и третьего цифроаналогового преобразователя 18 (ЦАП3) по закону:
U2(t)=-Umsin(ωt)+U0.
где Um - амплитуда напряжения, B,
U0 - постоянное смещение напряжения, В.
Напряжения U1(t) с выхода второго цифроаналогового преобразователя 17 (ЦАП2) поступает на вход первого усилителя 19 (У1) и усиливается. Усиленное напряжение U1(t) с выхода первого усилителя 19 (У1) поступает на конденсатор 9 гребенчатого двигателя микромеханического гироскопа. На конденсатор 10 гребенчатого двигателя микромеханического гироскопа поступает напряжение с выхода третьего цифроаналогового преобразователя 18 (ЦАП3) усиленное вторым усилителем 20 (У2). В результате, через конденсаторы 9, 10 гребенчатого двигателя начинает протекать ток, который поступает на вход преобразователя ток-напряжение 11 (ПТН) и преобразуется в пропорциональное напряжение. Напряжение с выхода преобразователя ток-напряжение 11 (ПТН) поступает на первый вход синхронного детектора 12 (СД), на второй вход которого поступает напряжение с первого цифроаналогового преобразователя 16 (ЦАП1). Напряжение с выхода синхронного детектора 12 (СД) фильтруется фильтром нижних частот 13 (ФНЧ) и оцифровывается аналого-цифровым преобразователем 14 (АЦП). Оцифрованное напряжение Up, пропорциональное синфазной составляющей суммарного тока, протекающего через конденсаторы 9 и 10 гребенчатого двигателя, передается и запоминается в микроконтроллере 15 (МК).
На втором этапе микроконтроллер 15 (МК) через интерфейс устанавливает выходные параметры первого цифроаналогового преобразователя 16 (ЦАП1) по закону:
Ur2(t)=Urmcos(2ωt).
Операции первого этапа повторяются, оцифрованное напряжение Uq, пропорциональное квадратурной составляющей суммарного тока, протекающего через конденсаторы 9 и 10 гребенчатого двигателя, предается и запоминается в микроконтроллере 15 (МК).
Микроконтроллер 15 (МК) рассчитывает фазовый сдвиг ϕ в суммарном токе, протекающем через конденсаторы 9 и 10 гребенчатого двигателя, по формуле
 ,
,
где U1 - напряжение с выхода преобразователя ток-напряжение, B;
E - значение деноминатора синхронного детектора, B;
T - время интегрирования, с.
Если фазовый сдвиг не равен 90°, что соответствует максимальной амплитуде первичных колебаний микромеханического гироскопа, то микроконтроллер 15 (МК) рассчитывает собственную резонансную частоту первичных колебаний микромеханического гироскопа по формуле
 ,
,
где Q - значение добротности канала первичных колебаний микромеханического гироскопа.
Затем микроконтроллер 15 (МК) через интерфейс изменяет значение частоты ω на выходе второго цифроаналогового преобразователя 17 (ЦАП2) и третьего цифроаналогового преобразователя 18 (ЦАП3) на рассчитанное значение собственной резонансной частоты первичных колебаний микромеханического гироскопа.
Таким образом, за два такта измерений происходит возбуждение и стабилизация первичных колебаний микромеханического гироскопа вокруг оси Z.
При возникновении вращения (угловой скорости) основания 2 вокруг осей X и Y возникают силы Кориолиса, под действием которых подвижная масса 1 начинает совершать вторичные угловые колебания вокруг осей X и Y. Амплитуды этих колебаний, пропорциональные измеряемым угловым скоростям, преобразуются в электрические сигналы при помощи емкостных датчиков, образованных неподвижными пластинами 4, закрепленными на основании 2 и подвижными пластинами, закрепленными на нижней поверхности подвижной массы 1.
Микромеханический гироскоп, содержащий подвижную массу на двухосном резонансном подвесе, неподвижное основание, подвижные и неподвижные электроды, образующие гребенчатый двигатель по оси возбуждения колебаний, подвижные и неподвижные электроды, расположенные по оси измерения выходного сигнала и образующие емкостной датчик, к выходу которого подключена система съема выходной информации, систему возбуждения и стабилизации первичных колебаний, отличающийся тем, что система возбуждения и стабилизации первичных колебаний содержит подвижные электроды двух конденсаторов гребенчатого двигателя, соединенные в общей точке, к которой последовательно подключены преобразователь ток-напряжение, синхронный детектор, фильтр нижних частот, аналого-цифровой преобразователь и микроконтроллер, который соединен с первым, вторым и третьим цифроаналоговыми преобразователями, при этом выход первого цифроаналогового преобразователя соединен со вторым входом синхронного детектора, выход второго цифроаналогового преобразователя через первый усилитель подключен к неподвижным электродам первого конденсатора гребенчатого двигателя, выход третьего цифроаналогового преобразователя подсоединен через второй усилитель к неподвижным электродам второго конденсатора гребенчатого двигателя.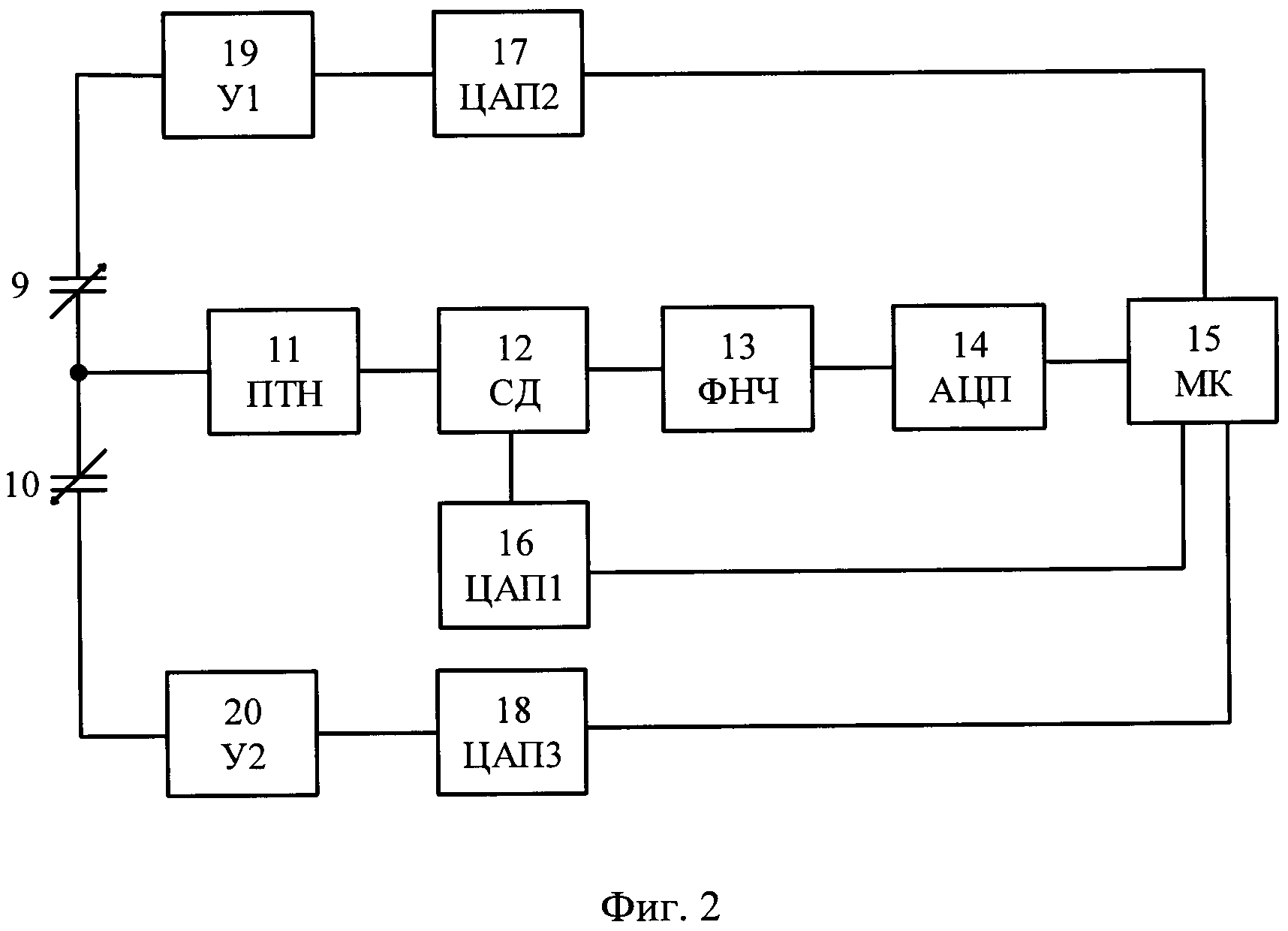
Масляно-смоляная композиция
Способ изготовления хроматографического генератора технеция-99m облученным нейтронами молибденом-98
Способ плазменно-дуговой сварки плавящимся электродом
Резец для горных и дорожных машин
Способ получения диоксида титана рутильной модификации (варианты)
Способ испытания элементов котельного оборудования и трубопроводов на прочность и герметичность
Способ тушения пожаров
Генератор для получения стерильных радиоизотопов
Устройство для измерения переменных токов высоковольтной линии электропередачи
Масляно-смоляная композиция
Интегральный микромеханический гироскоп
Микромеханический акселерометр
Интегральный микромеханический гироскоп
Микромеханический гироскоп
Трёхосевой микромеханический акселерометр
Двухосевой микромеханический акселерометр
Аналоговый синхронный усилитель

