Результат интеллектуальной деятельности: ГИДРОСАМОЛЁТ
Вид РИД
Изобретение
Изобретение относится к авиации, а именно к гидросамолетам с подрессоренными поплавками.
Из уровня техники известны гидросамолеты с подрессоренными поплавками.
Так, в изобретении СССР №5139, МПК В64С 35/00, дата публикации 30.04.1928 г., автор Г. Юнкерс [1], представлен гидросамолет, содержащий фюзеляж, соединенный посредством стоек, по меньшей мере, с одним поплавком, стойки имеют носовую и основную опоры, носовые стойки оснащены упругодемпфирующим элементом, выполненным, например, в виде амортизаторов, а основные опоры соединены с поплавком посредством одностепенного шарнира. Упругодемпфирующие элементы, выполненные, например, в виде амортизаторов, могут не обеспечить эффективного демпфирования при колебании поплавков на всех скоростях движения на воде в связи с изменением частоты ударных нагрузок на поплавок, что является недостатком такого гидросамолета с подрессоренными поплавками.
В изобретении США №4685641, МПК B60V 1/08; В64С 25/52; В64С 25/54; В64С 35/00, дата публикации 11.08.1987 [2], представлен летательный аппарат, контактирующий при движении с поверхностью воды, содержащий фюзеляж, соединенный посредством стоек, по меньшей мере, с одной гидролыжей, соединенной с фюзеляжем посредством основной стойки, оснащенной упругодемпфирующим элементом, и шарнира в носовой части, при этом летательный аппарат оснащен системой управления упругодемпфирующими элементами. Недостатком изобретения [2] является отсутствие водоизмещающих поплавков, что ограничивает его возможности базирования на воде.
В патентном документе Японии JP5659370, МПК В63В 1/22; В63В 39/00; В64С 25/54; В64С 35/00, дата публикации 28.01.2015 [3], представлен гидросамолет, содержащий фюзеляж, соединенный посредством стоек, по меньшей мере, с одним поплавком, стойки имеют носовую и основную опоры, соединенные с поплавком посредством одностепенного шарнира, по меньшей мере, одна из стоек оснащена упругодемпфирующим элементом. В гидросамолете [3] поплавки оснащены упругими соединениями центральной части с носовой и кормовой частями поплавка, что обеспечивает изменение формы поплавка при волнении и снижение перегрузок, действующих на поплавки и фюзеляж гидросамолета. Однако отсутствие системы управления упругодемпфирующими элементами (подрессориванием) ограничивает эффективность демпфирования при колебании поплавков на всех скоростях движения на воде вследствие изменения частоты ударных нагрузок на поплавок. Это является недостатком гидросамолета с подрессоренными поплавками, представленного в [3].
Гидросамолет с подрессоренными поплавками, представленный в патентном документе [3], принят за наиболее близкий аналог.
Технический результат состоит в уменьшении действующих на фюзеляж перегрузок и амплитуд колебаний в широком диапазоне волнения и скоростей движения по воде.
Сущность изобретения состоит в следующем.
Гидросамолет, как и в наиболее близком аналоге [3], содержит фюзеляж, соединенный посредством стоек, по меньшей мере, с одним поплавком, стойки имеют носовую и основную опоры, соединенные с поплавком посредством одностепенного шарнира, по меньшей мере, одна из стоек оснащена упругодемпфирующим элементом, но в отличие от наиболее близкого аналога [3] гидросамолет оснащен системой управления упругодемпфирующими элементами, содержащей пульт управления, датчики вертикальных и продольно-угловых перегрузок фюзеляжа и, по меньшей мере, одного из поплавков гидросамолета, датчики скорости обжатия, по меньшей мере, одной из стоек, датчики упругой и демпфирующей составляющей силы, возникающей, по меньшей мере, в одной из стоек, преобразовательно-усилительный блок, бортовую вычислительную машину, формирующую управляющий сигнал для исполнительного блока, блок корректировки управляющего сигнала с пульта управления и исполнительный механизм по управлению жесткостью и демпфированием, по меньшей мере, одного упругодемпфирующего элемента стойки.
Гидросамолет характеризуется тем, что каждая из стоек оснащена датчиками вертикальных и продольно-угловых перегрузок каждого из поплавков гидросамолета, датчиками скорости обжатия, датчиками упругой и демпфирующей составляющей силы, возникающей в каждой из стоек.
Гидросамолет характеризуется тем, что одна из стоек каждого из поплавков оснащена датчиками вертикальных и продольно-угловых перегрузок каждого из поплавков гидросамолета, датчиками скорости обжатия, датчиками упругой и демпфирующей составляющей силы, возникающей в указанной стойке, а другая стойка соединена с поплавком посредством одностепенного шарнира, установленного на пневмоамортизаторе с малым ходом обжатия.
Признаки, характеризующие сущность изобретения, образуют совокупность и являются существенными для достижения технического результата.
Выполнение гидросамолета содержащим фюзеляж, соединенный посредством стоек, по меньшей мере, с одним поплавком, оснащение стоек носовой и основной опорами, соединенными с поплавком посредством одностепенного шарнира, оснащение, по меньшей мере, одной из стоек упругодемпфирующим элементом обеспечивает, как и в наиболее близком аналоге [3], снижение действующих на фюзеляж перегрузок вследствие обжатия упругодемпфирующего элемента стоек. Оснащение, по меньшей мере, одного упругодемпфирующего элемента системой управления, содержащей пульт управления, датчики вертикальных и продольно-угловых перегрузок фюзеляжа и, по меньшей мере, одного из поплавков гидросамолета, датчики линейного обжатия и скорости обжатия, по меньшей мере, одной из стоек, датчики упругой и демпфирующей составляющей силы, возникающей, по меньшей мере, в одной из стоек, преобразовательно-усилительный блок, бортовую вычислительную машину, формирующую управляющий сигнал для исполнительного блока, блок корректировки управляющего сигнала с пульта управления и исполнительный механизм по управлению жесткостью и демпфированием, по меньшей мере, одного упругодемпфирующего элемента стойки, приводит при встрече поплавков с волнами к возможности прогнозировать силу удара и регулированию характеристик упругости и демпфирования. Это позволяет уменьшить передаваемую на фюзеляж энергию удара при обжатии амортизаторов упругодемпфирующих элементов. Это обеспечивает уменьшение действующих на фюзеляж перегрузок и амплитуд колебаний в широком диапазоне волнения и скоростей движения по воде.
Оснащение каждой из стоек датчиками вертикальных и продольно-угловых перегрузок каждого из поплавков гидросамолета, датчиками линейного обжатия и скорости обжатия, датчиками упругой и демпфирующей составляющей силы, возникающей в каждой из стоек, и возможность управления характеристиками упругости и демпфирования приводит к увеличению поглощаемой энергии ударов поплавков при встрече с волнами, что обеспечивает уменьшение действующих на фюзеляж перегрузок и амплитуд его колебаний в широком диапазоне волнения и скоростей движения по воде.
Выполнение одной из стоек каждого из поплавков датчиками вертикальных и продольно-угловых перегрузок каждого из поплавков гидросамолета, датчиками величины и скорости обжатия, датчиками упругой и демпфирующей составляющей силы, возникающей в указанной стойке, и соединение другой стойки с поплавком посредством одностепенного шарнира, установленного на пневмоамортизаторе с малым ходом обжатия, обеспечивает поглощение энергии удара такой стойкой поплавка, что способствует уменьшению действующих на фюзеляж перегрузок и амплитуд колебаний в широком диапазоне волнения и скоростей движения по воде.
Изобретение поясняется чертежами.
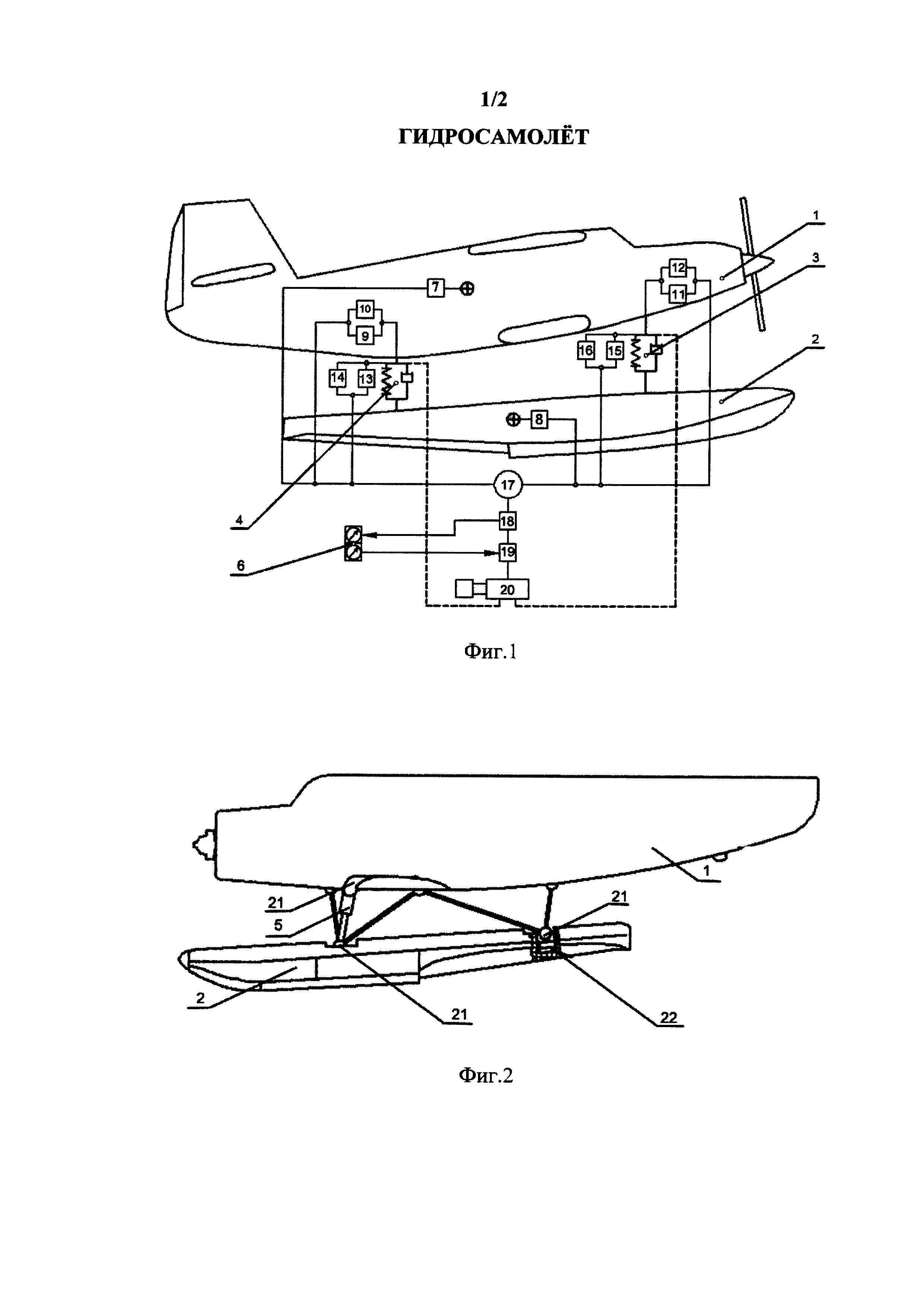
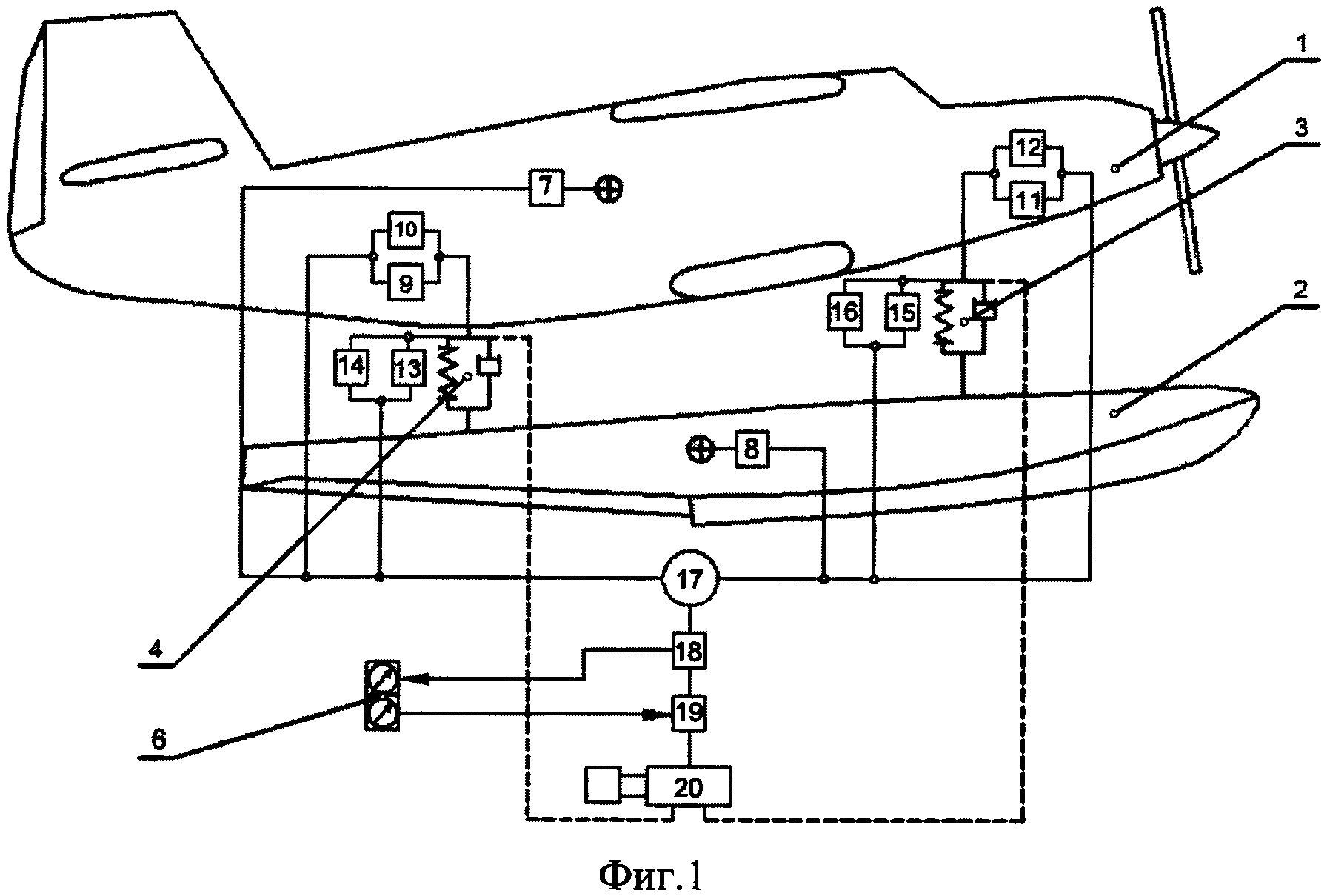
На фиг. 1 представлен гидросамолет с системой управления упругодемпфирующими характеристиками подрессоренных поплавков.
На фиг. 2 представлен гидросамолет с носовыми и основной стойками, оснащенными упругодемпфирующими элементами.
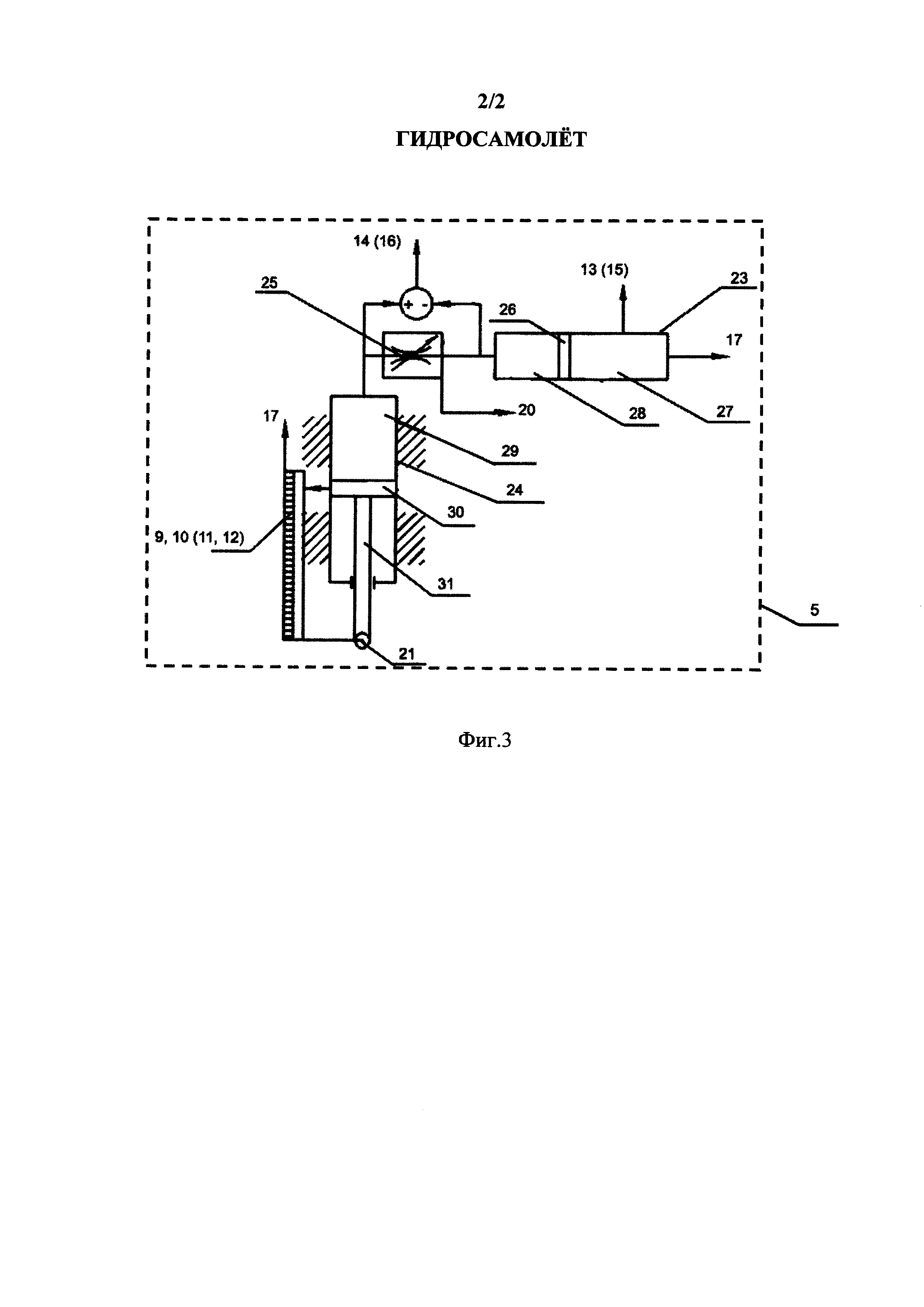
На фиг. 3 представлена структурная схема упругодемпфирующего элемента.
Гидросамолет с подрессоренными поплавками устроен следующим образом.
Гидросамолет содержит фюзеляж 1, по меньшей мере, один поплавок 2, соединенный с фюзеляжем 1 носовой 3 и основной 4 стойками. Носовая стойка 3 и/или основная стойка 4 (фиг. 1) оснащены упругодемпфирующим элементом 5 (фиг. 2).
Гидросамолет оснащен системой управления упругодемпфирующими элементами 5, содержащей пульт управления 6 оператором, датчик 7 вертикальных и продольно-угловых перегрузок фюзеляжа 1, датчик 8 вертикальных и продольно-угловых перегрузок, по меньшей мере, одного из поплавков 2 гидросамолета, датчик 9 скорости обжатия и датчик 10 линейного обжатия основной стойки 4, датчик 11 скорости обжатия и датчик 12 линейного обжатия носовой стойки 3, датчики упругой 13 и демпфирующей 14 составляющей силы, возникающей в основной стойке 4, датчики упругой 15 и демпфирующей 16(15) составляющей силы, возникающей в носовой стойке 3, преобразовательно-усилительный блок 17, бортовую вычислительную машину 18, формирующую управляющий сигнал для исполнительного блока (не показан), блок 19 корректировки управляющего сигнала с пульта управления 6 оператором и исполнительный механизм 20 по управлению жесткостью и демпфированием, по меньшей мере, одного упругодемпфирующего элемента 5 носовой 3 и/или основной 4 стоек (фиг. 1).
Гидросамолет может выполняться с оснащением каждого из поплавков 2 одной из стоек, например, носовой стойки 3, упругодемпфирующим элементом 5. При этом другая, например, основная стойка 4 соединена с поплавком 2 посредством одностепенного шарнира 21, установленного на пневмоамортизаторе 22 с малым ходом обжатия (фиг. 2).
Упругодемпфирующий элемент 5 содержит гидропневмоамортизатор 23, гидроцилиндр 24 и управляемый дроссельный узел 25. Гидропневмоамортизатор 23 разделен поршнем 26 на пневмокамеру 27 и гидравлическую полость 28. Гидроцилиндр 24 содержит гидравлическую полость 29, поршень 30 и шток 31, соединенный посредством одностепенного шарнира 21 с поплавком 2. Гидравлическая полость 28 гидропневмоамортизатора 23 через управляющий дроссельный узел 25 гидравлически связана с гидравлической полостью 29 гидроцилиндра 28 (фиг. 3).
Управление жесткостью и демпфированием упругодемпфирующих элементов 5 рассмотрено на примере основной стойки 4.
Исполнительный механизм 20 по управлению жесткостью и демпфированием упругодемпфирующих элементов 5 основной стойки 4 содержит компрессорную станцию (не показано), пневматически связанную с пневмокамерой 27 гидропневмоамортизатора 23. Датчик 13 упругой составляющей силы, возникающей в основной стойке 4, измеряет давление в пневмокамере 27 гидропневмоамортизатора 23. Скорость перемещения и положение поршня 30 гидроцилиндра 24 фиксируется соответственно датчиком 9 скорости обжатия основной стойки 4 и датчиком 10 линейного обжатия основной стойки 4. Перепад (разность) давления в гидравлической полости 28 гидропневмоамортизатора 23 и в гидравлической полости 29 гидроцилиндра 24 формирует сигнал на датчик 14(13) демпфирующей составляющей силы, возникающей в основной стойке 4. Сигнал датчика 13(12) упругой составляющей силы, возникающей в пневмокамере 27 гидропневмоамортизатора 23 в основной стойке 4, поступает на исполнительный механизм 20 по управлению жесткостью и демпфированием основной стойки 4 (фиг. 3).
Аналогично выполняется управление жесткостью и демпфированием упругодемпфирующих элементов 5 носовой стойки 3.
Компрессорная станция (не показано) пневматически связана с пневмокамерой 27 гидропневмоамортизатора 23 носовой стойки 3. Датчики 15 упругой составляющей силы, возникающей в носовой стойке 3, измеряют давление в пневмокамере 27 гидропневмоамортизатора 23. Скорость перемещения и положение поршня 30 гидроцилиндра 24 фиксируется соответственно датчиками 12 линейного обжатия и датчиками 11 скорости обжатия носовой стойки 3. Перепад (разность) давления в гидравлической полости 28 гидропневмоамортизатора 23 и в гидравлической полости 29 гидроцилиндра 24 формирует сигнал на датчик 16 демпфирующей составляющей силы, возникающей в носовой стойке 3. Сигнал датчиков 15 упругой составляющей силы, возникающей в пневмокамере 27 гидропневмоамортизатора 23 в носовой стойке 3, поступает на исполнительный механизм 20 по управлению жесткостью и демпфированием носовой стойки 3 (фиг. 3).
Исполнительный механизм 20 упругодемпфирующего элемента 5 генерирует управляющий сигнал на управляемый дроссельный узел 24 и на изменение давления в пневмокамере 27 гидропневмоамортизатора 23 основной 4 и носовой 3 стоек.
Гидросамолет с подрессоренными поплавками функционирует следующим образом.
При движении гидросамолета по взволнованной поверхности на поплавки 2 действуют гидродинамические силы и перегрузки, возникающие при встрече с волнами, которые посредством носовой 3 и основной 4 стоек передаются на фюзеляж 1. При этом при разных скоростях движения и высотах (балльности) волн меняются частоты действующих на поплавки 2 гидродинамических сил и перегрузок. Оснащение носовой 3 и/или основной 4 стоек упругодемпфирующими элементами 5 приводит к уменьшению перегрузок на фюзеляже 1. Оснащение гидросамолета системой управления упругодемпфирующими элементами 5 позволяет снизить перегрузки, действующие на фюзеляж 1, в широком диапазоне волнения и скоростей движения по воде благодаря изменению характеристик упругости и демпфирования упругодемпфирующих элементов 5.
Система управления подрессориванием, включающая упругодемпфирующие элементы 5, работает следующим образом.
Сигналы с датчиков 7 и 8 вертикальных и продольно-угловых перегрузок фюзеляжа 1 и поплавков 2, с датчиков упругой 13 и демпфирующей 14 составляющей силы в основной стойке 4, с датчиков упругой 15 и демпфирующей 16 составляющей силы в носовой стойке 3, а также с датчиков линейного обжатия 9 и скорости линейного обжатия 10 основной стойки 4, датчиков линейного обжатия 11 и скорости линейного обжатия 12 носовой стойки 3 поступают в преобразовательно-усилительный блок 17.
Сигнал из преобразовательно-усилительного блока 17 поступает в бортовую вычислительную машину 18, которая по данным датчиков линейного обжатия 9 и скорости линейного обжатия 10 основной стойки 4 с датчиков линейного обжатия 11 и скорости линейного обжатия 12 носовой стойки 3 вычисляет относительные величины кинематических параметров, а также по данным с датчиков 7 и 8 вертикальных и продольно-угловых перегрузок фюзеляжа 1 и поплавков 2 методом интегрирования получает абсолютные значения кинематических параметров линейного обжатия и скорости линейного обжатия (их разность дает относительные величины). Пользоваться абсолютными величинами не рекомендуется, так как они получены в инерциальной системе отсчета и в длительном временном интервале погрешность будет возрастать непредсказуемым образом. Поэтому при помощи сигналов с датчиков упругой 13 и демпфирующей 14 составляющей силы в основной стойке 4 и датчиков упругой 15 и демпфирующей 16 составляющей силы в носовой стойке 3 также вычисляются относительные кинематические параметры линейного обжатия и скорости линейного обжатия основной стойки 4 и носовой стойки 3.
К указанным кинематическим параметрам относятся угловое и линейное перемещения, угловая и линейная скорость, а также угловое и линейное ускорение фюзеляжа 1 
 и поплавка 2
и поплавка 2 
 .
.
Далее бортовая вычислительная машина 18 усредняет относительные величины кинематических параметров, получая массив значений Δϑ, 
 Δу,
Δу, 
 по которым формируются законы управления вида
по которым формируются законы управления вида

где
 ,
,  - угловое ускорение фюзеляжа 1 и поплавка 2 соответственно;
- угловое ускорение фюзеляжа 1 и поплавка 2 соответственно;
 ,
,  - вертикальное ускорение фюзеляжа 1 и поплавка 2 соответственно;
- вертикальное ускорение фюзеляжа 1 и поплавка 2 соответственно;
РУ1,2, РД1,2 - упругая и демпфирующая силы носовой 3 и основной 4 стоек системы подрессоривания соответственно;
у1,2,  - обжатие и скорость обжатия носовой 3 и основной 4 стоек системы подрессоривания соответственно;
- обжатие и скорость обжатия носовой 3 и основной 4 стоек системы подрессоривания соответственно;
kДϑ; kУ - коэффициенты демпфирования и упругих сил.
Наиболее значимыми являются следующие составляющие коэффициенты демпфирования и упругих сил:


Величины входящих в эти выражения коэффициентов могут определяться в бортовой вычислительной машине 18 и/или в блоке корректировки 19.
При определении коэффициентов в бортовой вычислительной машине 18 и блоке корректировки по набору статистических данных о внешней среде, в которой предполагается осуществлять движение, указанные коэффициенты получаются методом последовательного приближения при математическом моделировании движения гидросамолета при конкретной реализации стохастического описания внешней среды (при этом важно оценивать корреляционную функцию полученной реализации).
При определении коэффициентов в блоке корректировки 19 используются экспертные оценки и опыт оператора.
Такое дублирование позволяет минимизировать ошибки, связанные с работой системы автоматики.
Представленные в описании изобретения сведения достаточны для разработки и изготовления гидросамолетов с подрессоренными поплавками на специализированном предприятии. Изобретение соответствует условию патентоспособности «промышленная применимость».
ПЕРЕЧЕНЬ ПОЗИЦИЙ И ОБОЗНАЧЕНИЙ К ИЗОБРЕТЕНИЮ «ГИДРОСАМОЛЕТ»
1 фюзеляж гидросамолета;
2 поплавок;
3 носовая стойка;
4 основная стойка;
5 упругодемпфирующий элемент
6 пульт управления
7 датчик вертикальных и продольно-угловых перегрузок фюзеляжа 1;
8 датчик вертикальных и продольно-угловых перегрузок поплавка 2;
9 датчик скорости обжатия основной стойки 4;
10 датчик линейного обжатия основной стойки 4;
11 датчик скорости обжатия носовой стойки 3;
12 датчик линейного обжатия носовой стойки 3;
13 датчик упругой составляющей силы, возникающей в основной стойке 4;
14 датчик демпфирующей составляющей силы, возникающей в основной стойке 4;
15 датчик упругой составляющей силы, возникающей в носовой стойке 3;
16 датчик демпфирующей составляющей силы, возникающей в носовой стойке 3;
17 преобразовательно-усилительный блок;
18 бортовая вычислительная машина;
19 блок корректировки управляющего сигнала с пульта управления 6(5);
20 исполнительный механизм по управлению жесткостью и демпфированием носовой 3 и основной 4 стоек;
21 одностепенной шарнир носовой 3 и основной 4 стоек;
22 пневмоамортизатор;
23 гидропневмоамортизатор упругодемпфирующего элемента 5;
24 гидроцилиндр упругодемпфирующего элемента 5;
25 управляемый дроссельный узел;
26 поршень гидропневмоамортизатора 23;
27 пневмокамера гидропневмоамортизатора 23;
28 гидравлическая полость гидропневмоамортизатора 23;
29 гидравлическая полость гидроцилиндра 24 упругодемпфирующего элемента 5;
30 поршень гидроцилиндра 24 упругодемпфирующего элемента 5;
31 шток поршня 30 гидроцилиндра 24 упругодемпфирующего элемента 5.
Лопасть несущего винта вертолёта с отклоняемой задней кромкой
Устройство для измерения давления и температуры
Способ торможения сверхзвукового потока
Устройство для измерения интегральной полусферической излучательной способности частично прозрачных материалов
Сопло газоструйной системы управления вертолета
Крупноразмерная аэродинамическая модель
Способ повышения прочности болтового металлокомпозиционного соединения
Устройство для измерения давления в аэродинамических трубах
Гидродинамический интерцептор
Магистральный пассажирский самолет на криогенном топливе
Гибридная силовая установка
Способ работы криогенной емкости для хранения жидкого водорода
Ротор магнитоэлектрической машины и способы его изготовления (варианты)

