Результат интеллектуальной деятельности: ДВУХРАМОЧНАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, ОСРЕДНЯЮЩАЯ ОШИБКИ
Вид РИД
Изобретение
Изобретение относится к области приборостроения, а именно к астроинерциальным навигационным системам (АИНС), в которых основная навигационная информация (счисляемые координаты и курс) корректируется по сигналам, поступающим с астровизирующего устройства (телеблока), и применяемым в составе бортового оборудования авиационно-космических объектов.
Из уровня техники известна выбранная заявителем в качестве прототипа двухрамочная астроинерциальная навигационная система (патент США №5396326, МПК G01C 21/16, опубл. 07.03.1995 г.), содержащая платформу с установленными на ней чувствительными элементами в виде трех акселерометров и трех лазерных гироскопов, а также телеблоком, помещенными в двухрамочный карданов подвес, обеспечивающий наведение телеблока в заданную расчетную точку и включающий внешнюю рамку крена и внутреннюю рамку тангажа с установленными на них датчиками углов наведения телеблока и следящих систем, обеспечивающих разворот рамок карданова подвеса относительно расчетных значений на углы, равные ±180 градусов.
Недостатком известной системы является относительно низкая точность счисления координат объекта визирования.
Техническим результатом изобретения является повышение точности счисления координат объекта визирования двухрамочной АИНС.
Указанный технический результат достигается тем, что астроинерциальная навигационная система содержит платформу с установленными на ней телеблоком, чувствительными элементами в виде трех акселерометров и трех лазерных гироскопов, помещенную в двухрамочный карданов подвес, обеспечивающий наведение телеблока в заданную расчетную точку и включающий внутреннюю рамку, выполненную горизонтальной высотной, а также внешнюю рамку, с установленными на них датчиками углов поворота карданова подвеса и двигателями отработки углов его выставки, выходы которых связаны со входами следящих систем управления карданова подвеса, при этом внешняя рамка карданова подвеса выполнена вертикальной азимутальной, с возможностью разворота на углы, отличающиеся на ±180 градусов относительно расчетного значения.
Структурная схема предложенной двухрамочной АИНС, поясняющая сущность заявленного изобретения, представлена на Фиг. 1, где:
1 - платформа астроинерциальной навигационной системы;
2 - чувствительные элементы;
3 - телеблок;
4 - вертикальная азимутальная рамка карданова подвеса;
5 - горизонтальная высотная рамка карданова подвеса;
6 - датчик угла поворота карданова подвеса по высоте;
7 - датчик угла поворота карданова подвеса по азимуту;
8 - двигатель отработки угла выставки карданова подвеса по высоте;
9 - двигатель отработки угла выставки карданова подвеса по азимуту;
10 - блок следящих систем управления карданова подвеса.
11 - цифровая электрическая схема;
12 - первая разностная схема;
13 - первый усилитель с коэффициентом усиления K;
14 - вторая разностная схема;
15 - второй усилитель с коэффициентом усиления K.
Двухрамочная АИНС работает следующим образом.
В автономном инерциальном режиме навигации происходит интегрирование сигналов, получаемых с выхода акселерометров, в результате чего определяются текущие скорости и координаты объекта. При необходимости коррекции скоростей и координат, определяемых инерциальной системой, включаются различные средства коррекции, в частности астроинерциальный режим навигации. При работе в данном режиме, по вычисленным инерциальной системой декартовым и угловым координатам определяются координаты выбранной звезды. Визирование выбранной звезды наведением телеблока осуществляется с помощью блока следящих систем 10, состоящего из цифровой электрической схемы 11, разностных схем 12, 14 и усилителей 13, 15 с коэффициентом усиления K. На входы разностных схем 12 и 14 блока 10 подается с цифровой электрической схемы 11 расчетное значение координат звезды, на вторые входы - фактическое положение телеблока 3 с датчиков углов поворота 6, 7 рамок 4 и 5 карданова подвеса. Полученные сигналы разности между расчетным и фактическим положением после усиления в усилителях 13, 15 позволяют формировать сигналы управления двигателями 8, 9 отработки расчетных углов горизонтальной 5 и вертикальной 4 рамок карданова подвеса. После определения фактических координат звезды по известной схеме, с целью компенсации инструментальных ошибок выставки телеблока, посредством поворота вертикальной рамки 4 телеблок с платформой разворачивается на угол ±180 град, по азимуту относительно расчетного угла, после чего производится повторное визирование звезды. Полученные координаты звезды определяются как среднее арифметическое двух результатов визирования.
Для понимания сущности предложенной АИНС рассмотрим более подробно выбранную в качестве прототипа известную систему посредством математического моделирования ее работы.
Поскольку в прототипе рассматривается вращение рамок карданова подвеса с разными скоростями, обозначим через Ω1 скорость вращения рамки крена, а через Ω2 - скорость вращения рамки тангажа. Поставим в соответствие углам вращения рамок за временной отрезок dT кватернионы углов поворота:


или, подставляя в (1), (2) элементы аij матрицы ориентации, которая может быть определена как (структура матрицы ориентации определяется выбранной системой координат):

где: γ, υ, Ψ - углы крена, тангажа и курса.
Получаем:


где кватернионы Ω1, Ω2 записаны через параметры Эйлера или Родрига-Гамильтона:


где:
i=1, 2, 3;
j=1, 2;
Cos(γi) - направляющий косинус вектора Ωj, или орта, совпадающего с вектором Ωj, построенным в исходной приборной системе координат (элементы первого и второго столбцов матрицы ориентации А).
Эквивалентный разворот ΩdT вокруг двух осей (крена и тангажа) будет соответствовать кватерниону Ω=ΩdT и определяться как кватернионное произведение двух кватернионов Ω1 и Ω2:

где второй нижний подстрочный индекс означает номер параметра кватерниона Ωj, j=1, 2.
Подставляя значения параметров кватернионов Ω1, Ω2 из (4), (5), получаем:
Действительная (скалярная) часть Ω:

Параметры при мнимых частях Ω:



Здесь в левой части соотношений (9)-(12) нижним индексом указан номер параметра кватерниона Ω эквивалентного разворота.
Подматрица  , получающаяся из кватернионной матрицы
, получающаяся из кватернионной матрицы

вычеркиванием первого столбца и первой строки, эквивалентна кососимметрической матрице разворота исходной системы координат на угол Ω, направляющие косинусы которого определены как параметры Ωi векторной части кватерниона Ω. Следовательно, новое значение матрицы ориентации А после ее разворота на эквивалентный угол ΩdT может быть описано уравнением, эквивалентным уравнению Пуассона, записанному в конечных разностях:

где:
А-, А+ - априорное (до поворота) и апостериорное (после поворота) значения матрицы ориентации;
 - кососимметрическая матрица, получающаяся из кватернионной матрицы (13) вычеркиванием из нее первого столбца и первой строки; элементы матрицы
- кососимметрическая матрица, получающаяся из кватернионной матрицы (13) вычеркиванием из нее первого столбца и первой строки; элементы матрицы  , i=0, 1, 2, 3 приведены в (9)-(12).
, i=0, 1, 2, 3 приведены в (9)-(12).
Рассмотрим поведение ошибок системы при принятом законе управления рамками карданова подвеса.
Уравнения ошибок рассматриваемой системы в проекциях на оси сопровождающего трехгранника будут иметь вид:






где:
Δω1, Δω2 - скоростные ошибки системы;
α1, α2 - ошибки построения вертикали;
β - вектор кинематических ошибок системы;
βi - элемент вектора β;
ω0 - частота Шулера;
ωi - элемент вектора абсолютных угловых скоростей;
νi - величины некомпенсированных дрейфов системы (регулярная составляющая) в проекциях на оси приборного трехгранника,
εi - ошибки акселерометров (регулярная составляющая) в проекциях на оси приборного трехгранника;
aij - элементы матрицы ориентации А;
u - вектор вращения Земли.
Уравнения (15)-(20) представляют неоднородную систему линейных уравнений, решение которых находится в виде свертки, или в операторной форме в виде произведения импульсной переходной функции системы на неоднородную часть уравнения, записанного в операторной форме. Импульсная переходная функция i-го канала однородной системы при пренебрежении перекрестными связями между каналами системы как величинами второго порядка малости имеет вид:

Определим операторную форму записи неоднородной части системы (15)-(20). После подстановки в правую часть (15)-(20) значений aij, ij=1, 2, 3 из (3) получим:


или, используя правило произведения тригонометрических функций:


Для рассматриваемого случая γ'=Ω1t, υ'=Q2t, Ψ'=0 (с учетом того, что углы γ, υ меняются во всем диапазоне главных значений аргумента), операторная форма записи (24), (25) будет иметь вид:

где р - оператор дифференцирования.
Отклик (выходной сигнал) по первому и второму каналу равен произведению G(p) на F1(p), F2(p) соответственно:

где xi - выходная переменная предложенной системы.
Операторная форма записи откликов первого и второго каналов рассматриваемой системы (28), (29) представляет собой однотипные полиномы, слагаемые которых имеют вид:


Оригиналом (30) будет функция вида:

(31) отличается от (30) оператором дифференцирования, стоящем в числителе. Вследствие этого оригиналом (31) будет производная от (32) следующего вида:

Подставляя (32), (33) в (28), (29), получаем аналитическую форму записи ошибок системы по первому и второму каналам системы при рассматриваемой форме управления:
Кривые (34), (35) имеют особые точки (Ω1, Ω2 и их алгебраические суммы), равные ω0, в которых знаменатели обращаются в ноль, т.е. имеют место условия резонанса, и убывают при Ω1,Ω2→∞.
Теперь рассмотрим работу предложенной системы.
При азимутально-высотной схеме подвеса для наведения в расчетную точку разворот телеблока осуществляется в азимуте вокруг третьей оси приборного трехгранника (внешняя ось карданова подвеса) и по высоте (внутренняя ось карданова подвеса), при этом азимутальный угол разворота А отсчитывается от первой оси против часовой стрелки, а угол высоты отсчитывается от третьей оси приборного трехгранника.
Как и в прототипе, рассматривается общая платформа, на которой установлены чувствительные элементы инерциальной системы - три гироскопа и три акселерометра и телеблок, но, в отличие от прототипа, платформа устанавливается в кардановом подвесе, имеющем схему азимутально-высотного подвеса, описанную выше (Фиг. 1), при этом циклическое вращение платформы в пределах ±180 град совершается вокруг только одной (азимутальной) оси.
Согласно Фиг.1, на кардановом подвесе предложенной системы закреплена платформа с жестко закрепленными на ней телеблоком и тремя акселерометрами (три гироскопа, закрепленные на платформе, не показаны). Платформа имеет вторую степень свободы по высоте. Стрелками показаны оси чувствительности акселерометров, материализующие приборный трехгранник, и визирная ось телеблока, коллинеарная третьей оси приборного трехгранника.
Как и выше, рассмотрим поведение ошибок системы при такой схеме карданова подвеса. Поскольку при рассматриваемой схеме подвеса платформы платформа будет описывать синусоидальные колебания вокруг азимутальной оси с заданной угловой скоростью Ω, операторная форма записи неоднородного члена в динамической группе уравнений ошибок системы будет иметь вид:

Умножая (21) на (36), получаем:

или, проведя обратное преобразование, находим оригинал функции x(t):

которая x(t)→0 при Ω→∞.
В частном случае при Ω=ω0 получаем ноль в знаменателе (38), т.е. система будет неустойчивой - явление резонанса.
Сравнительный анализ результатов, полученных в известной и предлагаемой системах, показывает, что отклик системы на такое воздействие представляет по существу однотипные реакции системы на внешние воздействия.
Приводим результаты моделирования, полученные при использовании известной и предложенной систем. Чтобы результаты были сопоставимы, при моделировании закладывались одни и те же инструментальные ошибки системы:
- некомпенсированный дрейф по первой оси - ν1=0.1 угл.мин/сек;
- ошибки акселерометров - ε1=0.1 м/сек;
- совместное наличие этих двух ошибок.
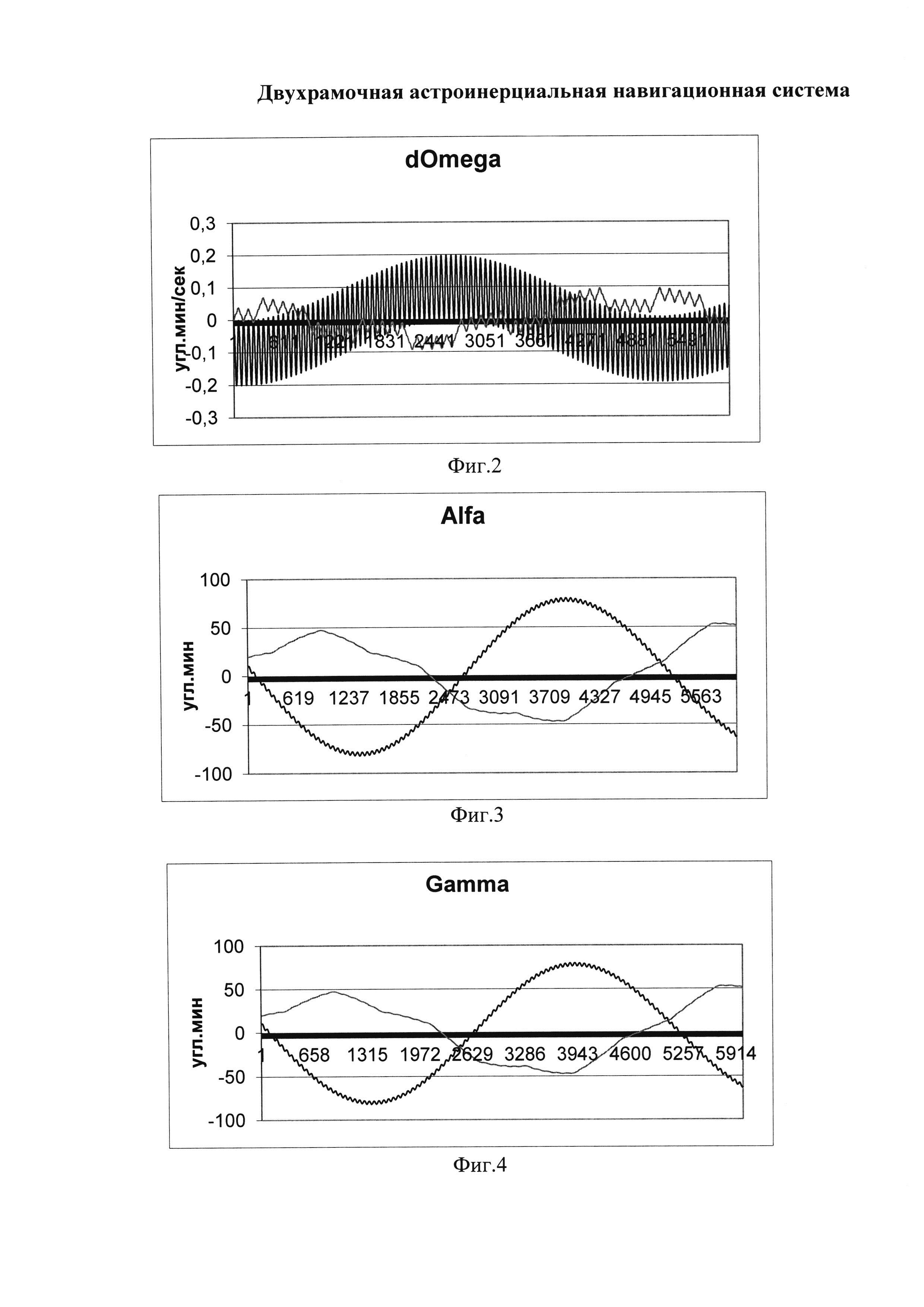
Ниже приводятся графики следующих ошибок:
- скоростная ошибка - dOmega;
- ошибка построения вертикали - Alfa;
- позиционная ошибка - Gamma.
Ошибки получены по результатам моделирования ошибок системы при наличии таких инструментальных ошибок как:
- некомпенсированный дрейф по одной из осей системы ν1=0.1 угл.мин/сек;
- несовпадение оси чувствительности акселерометра и оси гироскопа по одной из осей системы dε1=0.1 м/сек2;
- наличие в системе двух перечисленных выше инструментальных ошибок.
На Фиг. 2, 3, 4 представлены графики полученных ошибок системы (Δω, α, γ соответственно), полученные в результате моделирования при исходных данных: начальное значение матрицы ориентации А=Е, где Е - единичная матрица, т.е. углы γ=υ=Ψ=0, инструментальные ошибки системы ν1=0.1 угл.мин/сек, ε1=0.1 м/сек2, остальные ошибки равны нулю, управление проводилось по рекомендованной в прототипе схеме (скорость разворота внутренней (тангажной) рамки - 6 град/сек, скорость разворота внешней (креновой) рамки - 0.6 град/сек).
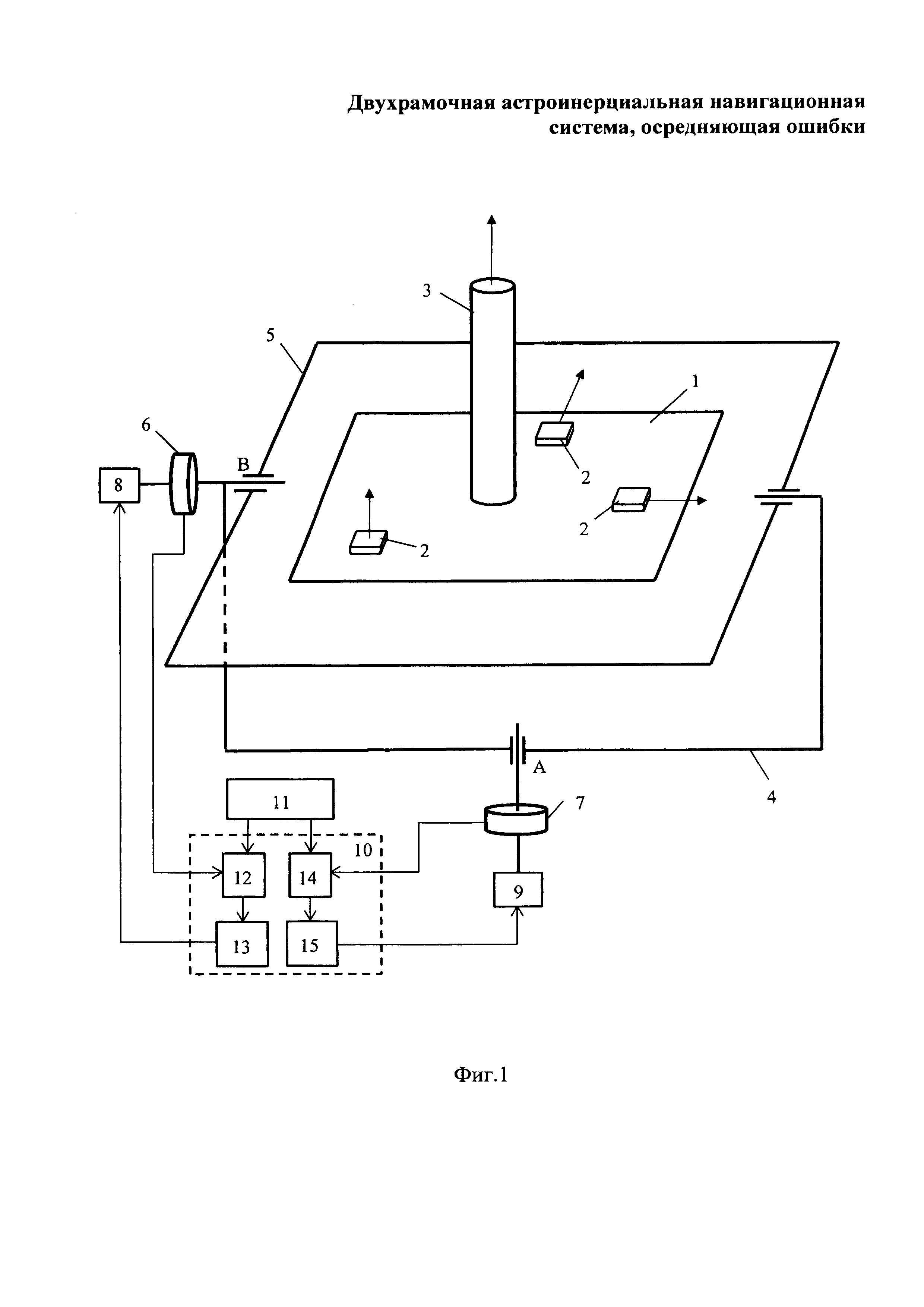
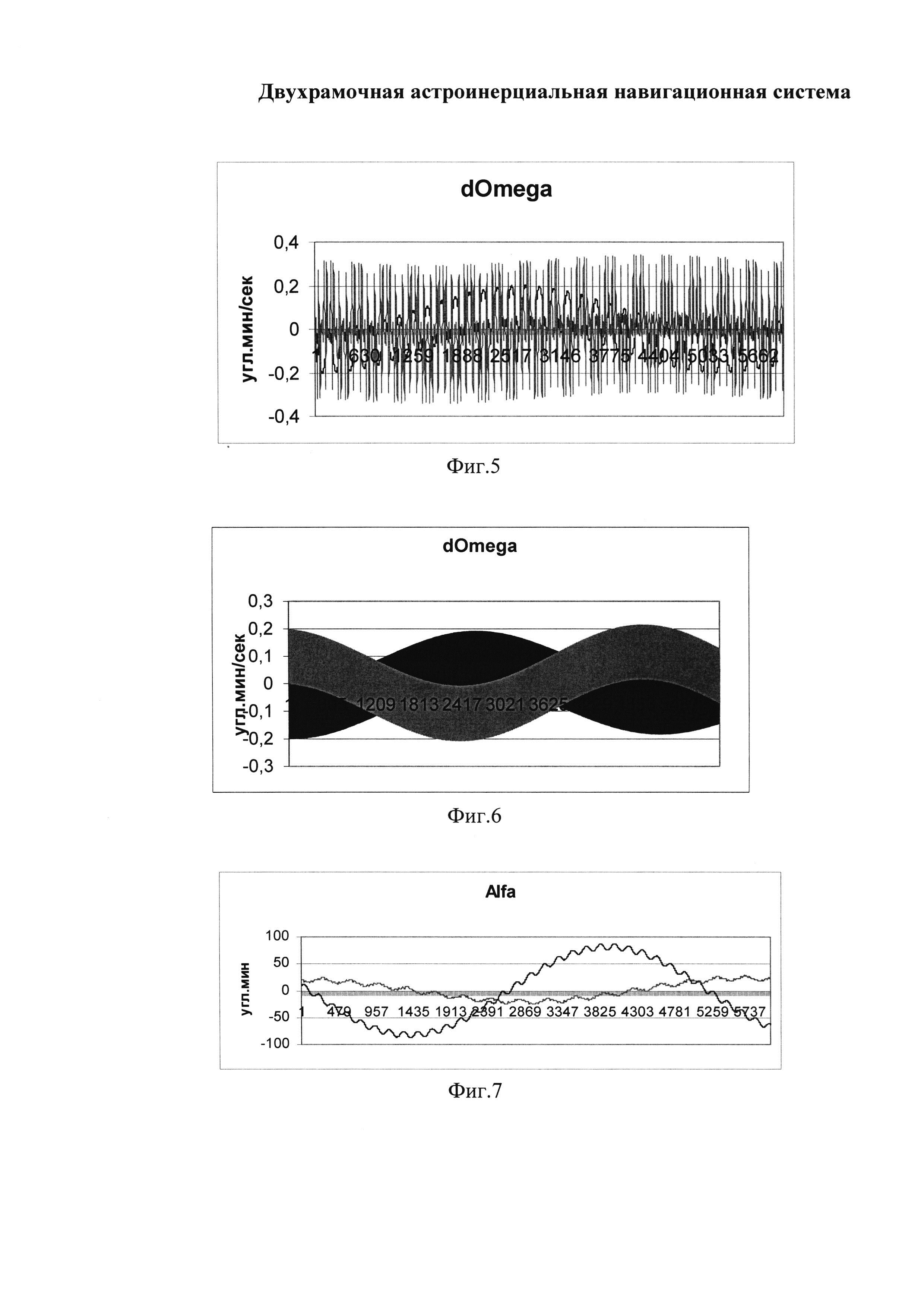
На Фиг. 5-10 представлены аналогичные результаты, полученные при тех же исходных данных при скоростях разворота Ω1=Ω2=20 град/сек.
Результаты, полученные при моделировании ошибок известной системы, сведены в Табл. 1, в которой приведены максимальные значения (без учета знака) полученных при моделировании ошибок Δω, α, γ соответственно.

Из результатов, приведенных в Табл. 1 и указанных на Фиг. 2-10, следует, что предложенная в прототипе астроинерциальная система обеспечивает эффективную компенсацию таких инструментальных ошибок, как нескомпенсированные дрейфы системы, при этом компенсация таких инструментальных ошибок, как ошибки акселерометров, не обеспечивается. Об этом свидетельствуют данные, приведенные в Табл. 1. Действительно, при рекомендованном в прототипе законе управления Ω1≠0, Ω2≠0 скоростные ошибки Δω практически не меняются, а ошибки построения вертикали α и позиционные ошибки γ резко уменьшаются, что свидетельствует о компенсации, в соответствии с (15)-(19) нескомпенсированных дрейфов ν.
Рассмотрим поведение тех же ошибок АИНС при выполнении карданова подвеса платформы предложенной системы.
На графиках Фиг. 11, 12, 13 приведены результаты моделирования ошибок системы Δω, α, γ при рассмотренной предложенной системе.
Как видно из приведенных Фиг. 11, 12, 13, такая система обеспечивает не только компенсацию таких инструментальных ошибок, как нескомпенсированные дрейфы, но и компенсацию ошибок акселерометров. Действительно, как показывают результаты моделирования, при организации вращения платформы в азимуте в диапазоне ±180 град, скоростная ошибка уменьшается с 0.2 угл.мин/сек до 0.025 угл.мин/сек, т.е. почти на порядок, ошибка построения вертикали уменьшается с 125 угл.мин до 20 угл.мин, т.е. шестикратно, позиционная ошибка уменьшается с 480 угл.мин до 20 угл.мин.
В режиме астронавигации стандартно вычисляются декартовы координаты звезды, выбранной из каталога, в проекциях на оси сопровождающего трехгранника, которые затем перемножением их на матрицу, обратную (или транспонированную, что эквивалентно в силу ее ортогональности) матрице ориентации перепроектируются на оси приборного трехгранника. Поскольку выбранная кинематика разворота приборного трехгранника относительно сопровождающего отличается от кинематики, описанной в прототипе, рассмотрим подробнее связь между углами А, В отработки карданова подвеса и декартовами координатами выбранной звезды в проекциях на оси приборного трехгранника. Обозначим через y вектор декартовых координат выбранной звезды в осях рассматриваемого приборного трехгранника. Как говорилось выше, рассматривается прибор, в котором визирная ось телеблока коллинеарна третьей оси приборного трехгранника, т.е. координаты визирной оси в проекциях на оси приборного трехгранника определяются как:

При рассматриваемой схеме подвеса телеблока (и платформы) декартовы орта y, совпадающего с линией визирования звезды, как функции углов А, В ее визирования будут выражаться как:

Элементы вектора у являются направляющими косинусами орта, совпадающего с линией визирования звезды, определенные в осях приборного трехгранника. Сразу следует отметить, что, т.к. визирная ось телеблока совпадает с третьей осью приборного трехгранника, то возможен другой эквивалентный угол разворота карданова подвеса в азимуте:

а угол В при этом меняет знак.
Несоосность линии визирования телеблока с третьей осью приборного трехгранника δy можно определить как результат поворота этой оси на три малых угла поворота вокруг осей приборного трехгранника, т.е. как результат умножения вектора y на кососимметрическую матрицу, соответствующую вектору δ этих малых углов разворота. Задачей астрокоррекции является определение вектора β кинематических ошибок системы по результатам астроизмерений, определенного в осях сопровождающего трехгранника. При визировании звезды угловые поправки ΔА, ΔВ, представляющие разности между расчетными значениями углов наведения и их фактическими значениями, получаемыми в результате визирования звезды, будут представлять линейные функции от суммы кинематической ошибки системы β и инструментальной ошибкой δ, вызванной несоосностью визирной оси телеблока и осями трехгранника. Обозначим эту суммарную ошибку как вектор δ+, заданный в проекциях на оси сопровождающего трехгранника, с элементами δ+i=βi+δi, i=1, 2, 3. Связь между угловыми поправками ΔА, ΔВ и вектором δ+ определяется из следующего тождества:
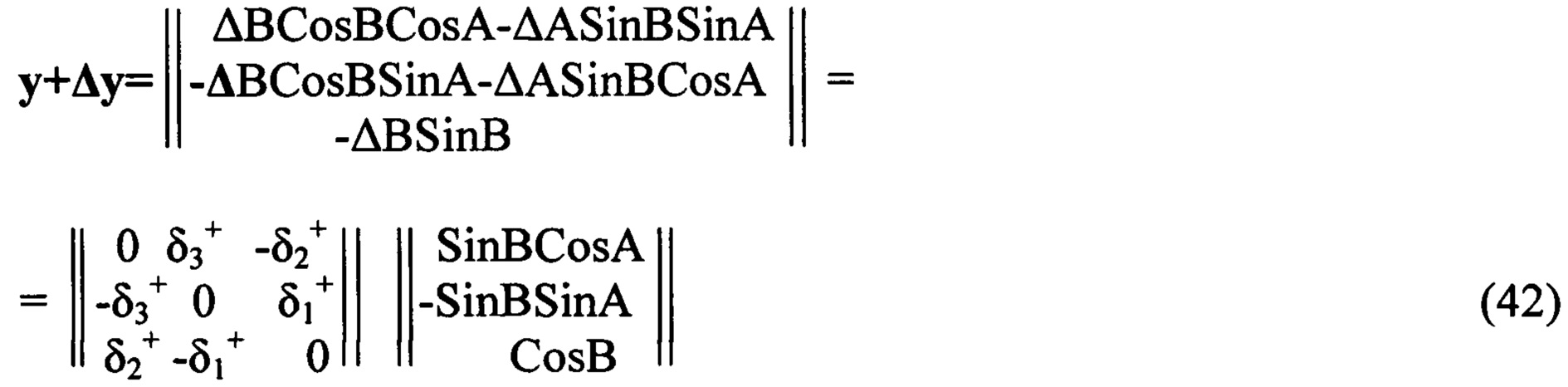
или в скалярной форме:



откуда получаем:


(46), (47) получены для случая, когда визирная ось телеблока выставлена на углы А и В. При развороте платформы на 180 град, вокруг третьей (азимутальной) оси приборного трехгранника, когда угол А меняется на 180 град, а угол В меняет знак, инструментальные ошибки выставки визирной оси телеблока изменят знак, а суммарную ошибку δ можно будет представить в виде δ-i=βi-δi, i=1, 2, 3.
При этом, если поправки определяются по (46), (47) в проекциях на оси сопровождающего трехгранники, то тригонометрические функции, стоящие в правых частях (46), (47) в качестве коэффициентов при δ±i, i=1, 2, 3, не изменятся. Следовательно, если мы проведем визирование звезды, выставив телеблок на расчетные углы А, В и получим угловые поправки ΔА1, ΔВ1, после чего проведем визирование той же звезды, предварительно развернув платформу на 180 град, вокруг азимутальной оси и выставив телеблок на углы А+180 град, -В и получим угловые поправки ΔА2, ΔВ2, а затем вычислим их полусумму ΔA=(ΔA1+ΔA2)/2, ΔB=(ΔB1+ΔB2)/2, то (42) определят связь между полученными ΔА, ΔВ и вектором β кинематических ошибок системы.
Таким образом, предлагаемая астроинерциальная система дает результаты, эквивалентные прототипу. Однако, поскольку, как хорошо известно, в режиме астронавигации определяется вектор кинематических ошибок системы β, т.е. координаты объекта определяются (и корректируются) с точностью до ошибок построения вертикали α, то эта ошибка является нижним пределом, которого может потенциально достигнуть точности режима астронавигации.
Как было сказано выше, предлагаемая система обеспечивает компенсацию таких ошибок как α так и β и, следовательно, повышает точность счисления координат объекта по сравнению с известной системой и в режиме астронавигации.
Астроинерциальная навигационная система, содержащая платформу с установленными на ней телеблоком, чувствительными элементами в виде трех акселерометров и трех лазерных гироскопов, помещенную в двухрамочный карданов подвес, обеспечивающий наведение телеблока в заданную расчетную точку и включающий внутреннюю рамку, выполненную горизонтальной высотной, а также внешнюю рамку, с установленными на них датчиками углов поворота карданова подвеса и двигателями отработки углов его выставки, выходы которых связаны со входами следящих систем управления карданова подвеса, отличающаяся тем, что внешняя рамка карданова подвеса выполнена вертикальной азимутальной, с возможностью разворота на углы, отличающиеся на ±180 градусов относительно расчетного значения.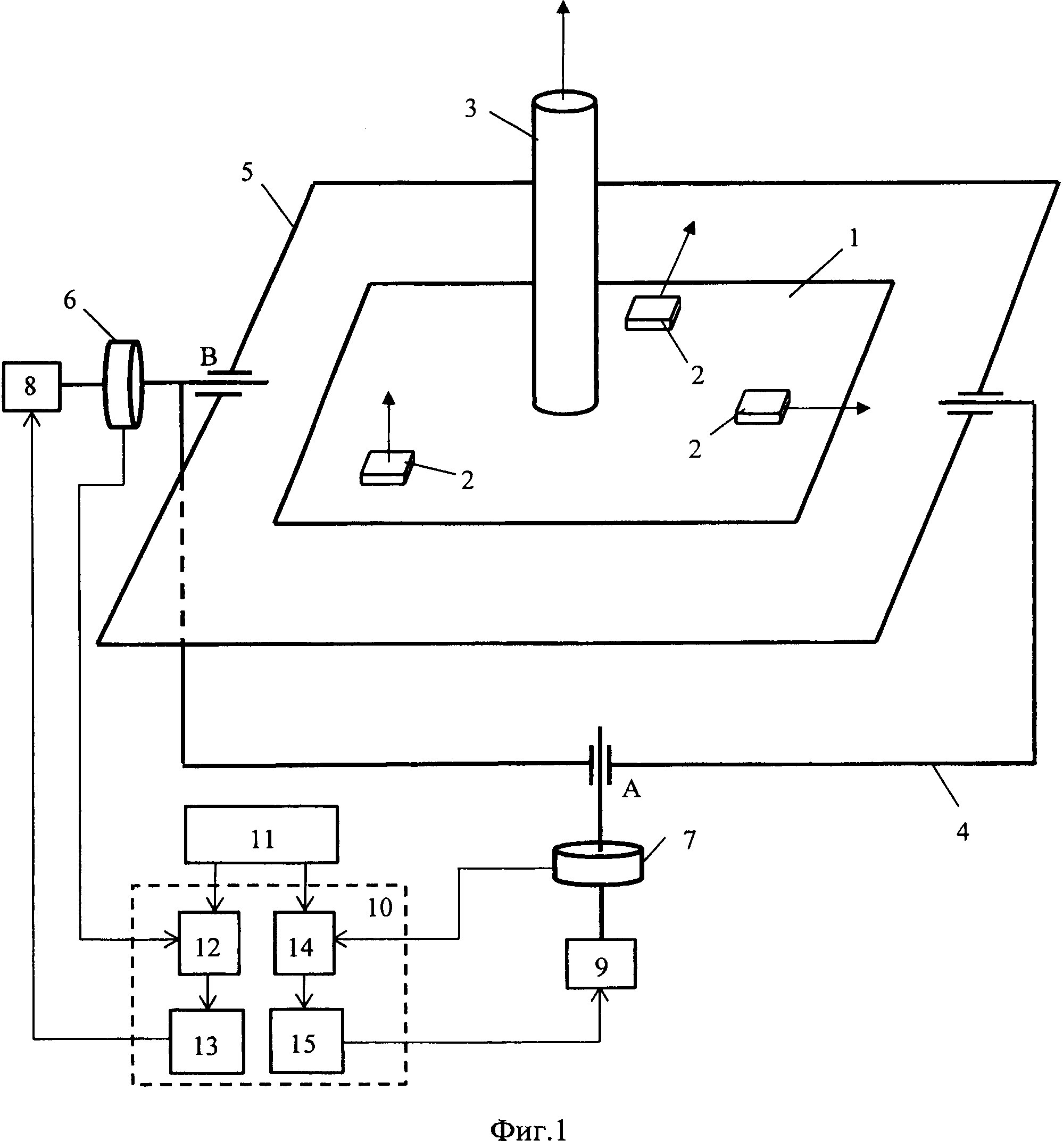


Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Способ компенсации систематических составляющих дрейфа гироскопических датчиков
Способ сборки кольцевого резонатора лазерного гироскопа (варианты)
Трехосный микромеханический блок чувствительных элементов
Система астроинерциальной навигации
Навигационно-пилотажный комплекс
Способ комплексирования бесплатформенных инерциальных навигационных систем
Способ компенсации дрейфа нулевых сигналов гироскопических датчиков
Способ построения астроинерциальной навигационной системы
Способ астрокоррекции
Система астровизирования
Способ первичной обработки выходной информации астровизирующего устройства
Система астровизирования
Способ астровизирования
Система астроинерциальной навигации
Способ определения навигационных параметров и бесплатформенная инерциальная навигационная система для его осуществления
Навигационно-пилотажный комплекс
Способ комплексирования бесплатформенных инерциальных навигационных систем
Способ построения астроинерциальной навигационной системы
Способ астрокоррекции

