Результат интеллектуальной деятельности: ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО
Вид РИД
Изобретение
Изобретение относится к области машиностроения и может быть использовано при создании сцепных устройств транспортных, тяговых, сельскохозяйственных, строительно-дорожных, боевых ремонтно-эвакуационных и других гусеничных и колесных машин.
Известны механические тягово-сцепные устройства. Они состоят из шара, которым заканчивается тяговый стержень изогнутой формы, и дышла с полусферической головкой, охватывающей этот шар. Для исключения расцепления на дышле смонтирован замок, выполненный в виде подпружиненного рычага, снабженного фиксатором (Щукин М.М. Сцепные устройства автомобилей и тягачей. - М.-Л.: Машгиз, 1961, стр. 35).
Недостатком такого тягово-сцепного устройства является его недостаточная надежность в условиях эксплуатации, поскольку в нем не исключена возможность перемещения рычага замка под действием сил трения между шаром, полусферической головкой и поверхностью рычага, контактирующего с шаром, а также возможность механических повреждений из-за ударных перегрузок, возникающих во время транспортировки.
Известно также тягово-сцепное устройство, выполненное в виде электропроводящего кабеля, на противоположных концах которого установлена пара электромагнитов, каждый из которых выполнен с возможностью контакта с металлическими частями корпуса соответствующего транспортного средства (US 4302026 A, B60D 1/18, B60R 16/02, B60R 16/023, 24.11.1981).
Его недостатком является невысокая надежность и небольшая сила сцепления электромагнитов с транспортным средством, ввиду необходимости постоянного протекания тока по обмотке электромагнита и ограничений величины этого тока, обусловленных перегревом обмотки и ограниченной мощностью бортовой сети транспортного средства.
Наиболее близкой к предложенному устройству является соединительная система между транспортным средством и орудием или другим транспортным средством, содержащая магнитный захват, реализованный в виде электромагнита или подвижного постоянного магнита, передвигаемого внешней силой, и контроллер, обеспечивающий управление магнитным захватом и формирование предупреждающих сигналов (ЕР 1769949 A1, В60Т 7/20, B60D 1/00, В60Р 3/32, 04.04.2007).
К недостаткам известного устройства относятся его пониженная надежность и небольшая величина силы сцепления с прицепным объектом. К пониженной надежности приводит наличие механических движущихся элементов для перемещения подвижного постоянного магнита, либо обмотки электромагнита, которая во время транспортировки (буксировки) прицепного объекта должна постоянно находится под напряжением. При этом даже кратковременное отключение этого напряжения приводит к расцеплению с транспортируемым объектом. Применение подвижных постоянных магнитов приводит также к уменьшению силы сцепления с прицепным объектом ввиду наличия немагнитного зазора между движущимися частями устройства, а также ограниченными возможностями реализации многополюсного магнитного захвата с механическим управлением. В случае применения электромагнита, находящегося под напряжением, сила магнитного притяжения к прицепному объекту оказывается небольшой из-за ограничений величины плотности тока в обмотке электромагнита, обусловленных ее перегревом и ограниченной мощностью бортовой сети транспортного средства.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение надежности и силы сцепления с прицепным объектом.
Для решения этой задачи в тягово-сцепном устройстве гусеничной или колесной машины, содержащем магнитный захват, механически соединенный с этой машиной и приспособленный для взаимодействия с поверхностью прицепного объекта, и контроллер, электрически соединенный с магнитным захватом, дополнительно реализовано одно или одновременно несколько следующих технических решений:
1) магнитный захват выполнен на основе по меньшей мере одного электропостоянного магнита, обмотка которого соединена с контроллером;
2) магнитный захват состоит из двух или более электропостоянных магнитов, соединенных с помощью шарниров или упругих элементов между собой, с машиной или с устройством, с помощью которого магнитный захват соединен с машиной;
3) тягово-сцепное устройство оснащено средством защиты и/или очистки соприкасающихся поверхностей магнитного захвата и прицепного объекта от загрязнений, частиц грунта, снега, льда и посторонних предметов;
4) тягово-сцепное устройство содержит лебедку с ручным, электрическим, механическим или гидравлическим приводом, приспособленную для подъема прямой, V-, Y- или U-образной штанги, с помощью которой магнитный захват соединен машиной;
5) тягово-сцепное устройство содержит вакуумный насос, соединенный при помощи шланга с магнитным захватом, который имеет уплотнение, охватывающее магнитный захват, расположенное со стороны поверхности соприкосновения с прицепным объектом и обеспечивающее реализацию вакуумного захвата;
6) последовательно с буксирным канатом, буксирной цепью или штангой, с помощью которого/которой магнитный захват соединен с машиной, или внутри штанги, установлено упругое и/или демпфирующее устройство, обеспечивающее сглаживания колебаний усилия в тягово-сцепном устройстве при начале движения и при движении машины;
7) тягово-сцепное устройство содержит датчик тягового усилия и/или датчик ускорения (акселерометр), соединенный с контроллером, который формирует предупреждающий сигнал и/или сигнал автоматического снижения тягового усилия, скорости движения или ускорения машины с целью предотвращения отрыва магнитного захвата от поверхности прицепного объекта;
8) тягово-сцепное устройство содержит датчик приближения магнитного захвата к поверхности прицепного объекта, соединенный с контроллером, который формирует сигналы автоматического включения магнитного захвата и/или информационные сигналы о его готовности к работе в случае уменьшения этого расстояния до предварительно установленной величины;
9) тягово-сцепное устройство содержит привод перемещения магнитного захвата в вертикальной и/или горизонтальной плоскости и видеокамеру, которые соединены с контроллером, выполненным с возможностью обработки сигналов видеокамеры с целью выявления участка поверхности прицепного объекта, на который возможна установка магнитного захвата, и последующего формирования сигналов управления приводом из условия перемещения магнитного захвата на этот участок.
Первый из указанных отличительных признаков, характеризующийся реализацией магнитного захвата на основе электропостоянных магнитов, обеспечивает повышение надежности тягово-сцепного устройства за счет отсутствия в конструкции магнитного захвата движущихся частей, а также обеспечения его работы без постоянного протекания электрического тока по его обмотке. Постоянный и перемагничиваемый магниты, обеспечивающие магнитный поток в электропостоянном магните, имеют остаточную индукцию более 1 Тл. Причем время существования высокого значения индукции в магнитных полюсах, ввиду отсутствия тока в обмотке и, соответственно, отсутствия ее перегрева, не ограничено. Это приводит к увеличению силы сцепления магнитного захвата с прицепным объектом.
Реализация второго отличительного признака, характеризующегося исполнением магнитного захвата в виде двух или более электропостоянных магнитов, соединенных между собой с помощью шарниров или упругих элементов, позволяет повысить надежность тягово-сцепного устройства за счет резервирования составных частей магнитного захвата, а также за счет обеспечение работоспособности тягово-сцепного устройства при отсутствии у прицепного объекта плоской поверхности. Обеспечение более плотного прилегания отдельных электропостоянных магнитов к неровной поверхности приводит к уменьшению средней величины немагнитного зазора и, соответственно, к увеличению тягового усилия устройства при транспортировке (буксировке) прицепных объектов с неровной поверхностью.
К этим же результатам приводит оснащение тягово-сцепного устройства средством защиты и/или очистки соприкасающихся поверхностей магнитного захвата и прицепного объекта от загрязнений, частиц грунта, снега, льда и посторонних предметов. Реализация этого отличительного признака обеспечивает уменьшение немагнитного зазора между этими поверхностями, что приводит к повышению надежности и силы сцепления магнитного захвата с прицепным объектом.
Реализация четвертого отличительного признака изобретения, характеризующегося применением лебедки, приспособленной для подъема штанги, с помощью которой магнитный захват соединен машиной, обеспечивает повышение надежности и силы сцепления с прицепным объектом за счет передачи части веса прицепного объекта на машину, что уменьшает буксование и увеличивает тяговое усилие машины. Наличие вертикальной составляющей тягового усилия лебедки облегчает транспортирование (буксировку) прицепного объекта и, соответственно, повышает надежность работы тягово-сцепного устройства.
Создание тягово-сцепного устройства с комбинированным магнитным и вакуумным захватом, предусмотренное пятым отличительным признаком изобретения, обеспечивает повышение его надежности за счет взаимного резервирования магнитного и вакуумного захвата, а также увеличения силы сцепления с прицепным объектом за счет суммирования сил магнитного и вакуумного захватов при их одновременной работе.
Установка, в соответствии с шестым отличительным признаком, упругого или демпфирующего устройства (звена) между магнитным захватом и штангой, буксирным канатом или буксирной цепью предотвращает расцепление магнитного захвата в начале движения (при разгоне) машины и в процессе ее движения за счет устранения динамических нагрузок в магнитном захвате, что приводит к повышению надежности работы тягово-сцепного устройства. При этом сглаживание колебаний силы, приложенной к магнитному захвату, приводит к увеличению ее максимального допустимого среднего значения.
По этим же причинам обеспечивается повышение надежности и силы сцепления с прицепным объектом в тягово-сцепном устройстве, реализованном в соответствии с седьмым отличительным признаком изобретения. В этом варианте осуществляется устранение перегрузок магнитного захвата и сглаживание колебаний приложенной к нему силы путем регулирования скорости движения или тягового усилия машины.
Автоматическое включение магнитного захвата при его приближении к поверхности прицепного объекта, реализованное в соответствии с восьмым отличительным признаком изобретения, обеспечивает повышение надежности надежности и силы сцепления магнитного захвата с прицепным объектом за счет его своевременного включения, обеспечения достаточной длительности импульса тока в обмотках электропостоянных магнитов для эффективного приведения магнитного захвата в рабочее состояние, а также за счет исключения возможности транспортирования прицепного объекта до достижения максимальной силы сцепления магнитного захвата.
Последний отличительный признак изобретения предусматривает применение системы технического зрения для выбора участка поверхности прицепного объекта, на который целесообразно устанавливать магнитный захват, а также его автоматическое перемещение на этот участок. Данное техническое решение обеспечивает повышение надежности и силы сцепления магнитного захвата с прицепным объектом за счет выбора того участка его поверхности, на котором достигается максимально возможная сила сцепления, а также за счет исключения ошибок оператора (машиниста) при выборе этого участка.
Из изложенного следует, что реализация как одного (любого) из указанных отличительных признаков изобретения, так и одновременная реализация нескольких признаков в их любом сочетании, обеспечивает создание тягово-сцепного устройства, обладающего повышенной надежностью и более высокой силой сцепления с прицепным объектом. Соответственно, эти признаки находятся в прямой причинно-следственной связи с указанным техническим результатом. Причем степень повышения надежности и увеличения силы сцепления возрастает при увеличении количества реализованных отличительных признаков и имеет максимально возможное значение в случае реализации всех этих признаков.
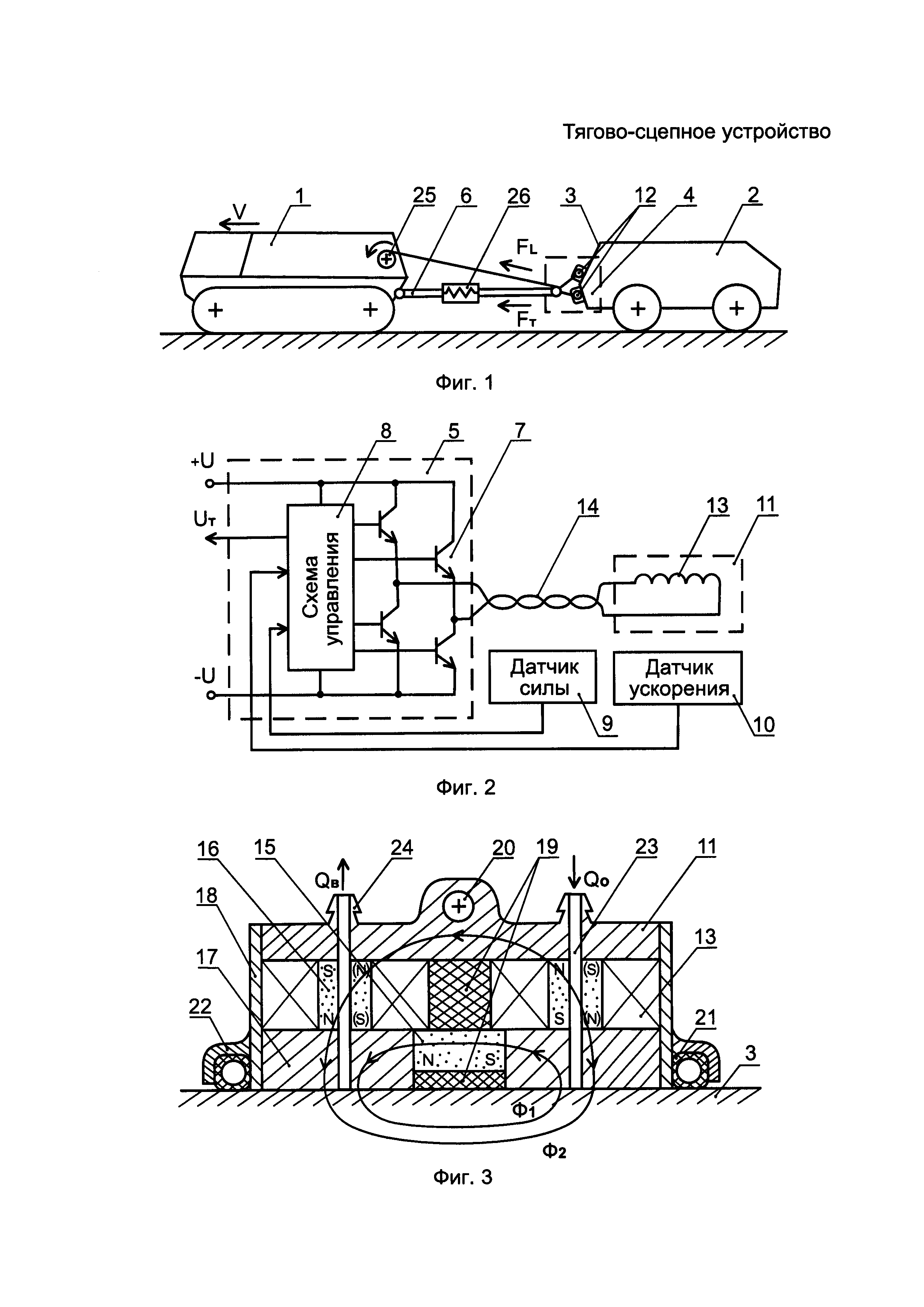
На фиг. 1 показана упрощенная схема тягово-сцепного устройства, на фиг. 2 - его электрическая схема, на фиг. 3 - пример реализации магнитного захвата, выполненного в виде одного электропостоянного магнита.
Тягово-сцепное устройство, которое может именоваться также сцепным устройством, сцепкой, буксировочным устройством, фаркопом и т.д., механически соединено с гусеничной или колесной машиной 1 и используется для буксировки (транспортирования) и/или подъема с помощью этой машины прицепного объекта 2, расположенного на земле, на воде или под водой, у которого по меньшей мере одна из частей имеет ферромагнитную поверхность 3, например, из стали. Этим объектом может быть другая гусеничная или колесная машина, навесное или прицепное рабочее орудие, прицепная или навесная сельскохозяйственная или строительно-дорожная машина, плавающий объект (катер, лодка, понтон и т.п.), какое-либо металлическое устройство, металлическая конструкция или металлический предмет.
В состав тягово-сцепного устройства входит магнитный захват 4, приспособленный для взаимодействия с поверхностью 3 прицепного объекта 2, и контроллер 5, электрически соединенный с магнитным захватом. Контроллер 5 может быть размещен на машине 1, внутри магнитного захвата 4, на его поверхности, на штанге 6 (прямой, V-, Y- или U-образной), с помощью которой магнитный захват соединен с машиной 1, или внутри этой штанги.
В состав контроллера 4 входит мостовой коммутатор на транзисторах (биполярных, полевых, биполярных с изолированным затвором и т.д.) 7, схема управления 8, реализованного, в частности, на основе программируемого микроконтроллера, а также датчики силы 9 и ускорения 10, размещенные на магнитном захвате 4, на штанге 6 или на машине. Электрическое питание контроллера (+U, -U) осуществляется от бортовой сети машины 1.
Магнитной захват 4 выполнен в виде одного или нескольких электропостоянных магнитов 11 (фиг. 3), соединенных с помощью шарниров или упругих элементов 12 между собой, с машиной 1, штангой 6, с буксировочным канатом или буксировочной цепью, соединяющей магнитный захват 4 с машиной. Выводы их обмоток 13 соединены с контроллером 5 с помощью электрического кабеля 14.
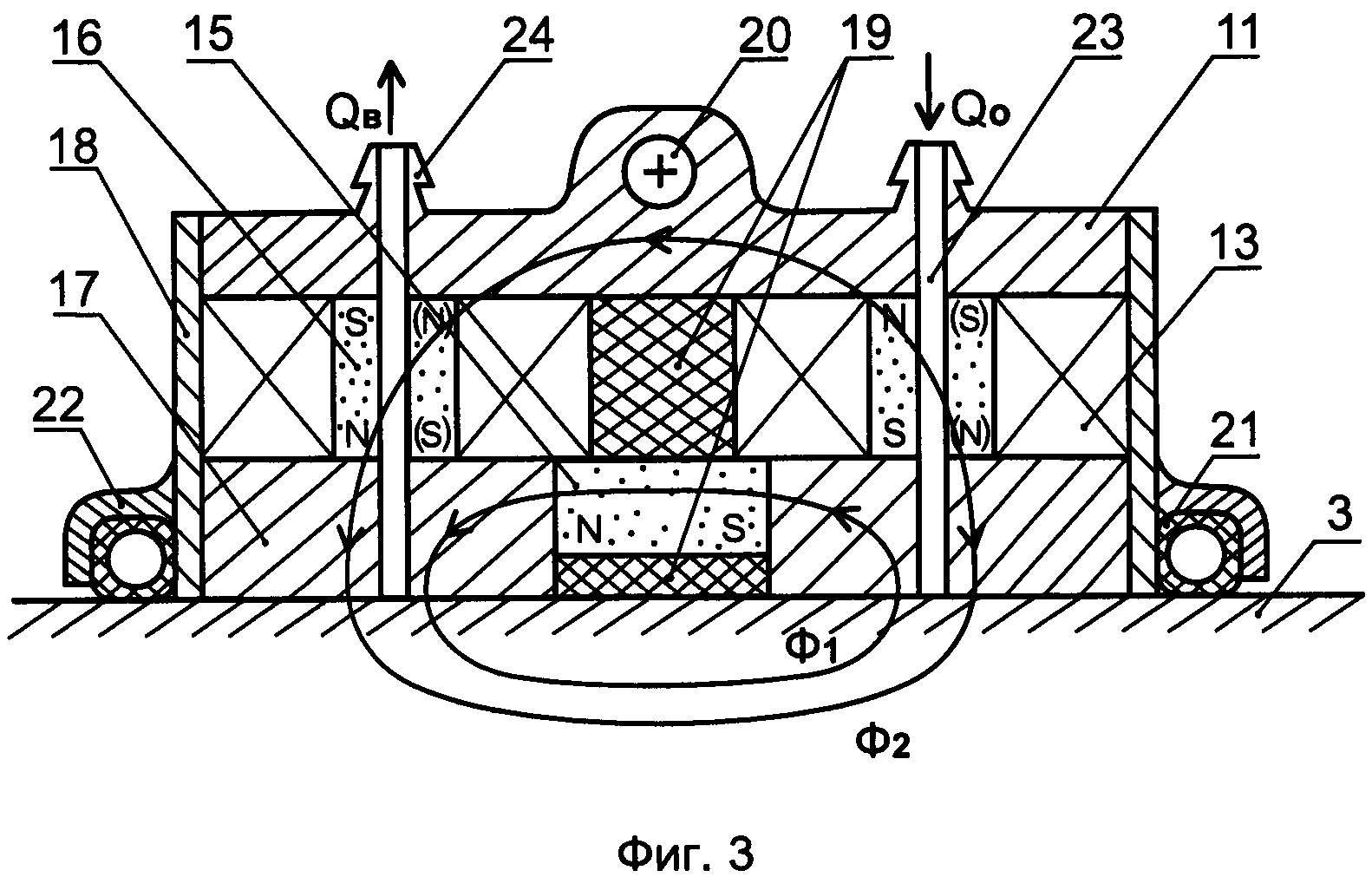
Электропостоянный магнит 11 содержит основной магнит 15, выполненный из материала с высокими значениями остаточной индукции и коэрцитивной силы, например, из материала неодим-железо-бор (NdFeB) и обратимые магниты 16, выполненные из материала с большой остаточной индукцией и относительно небольшой коэрцитивной силой, например, из Альнико (AlNiCo), ЮНДК.
Основной магнит 15 расположен между полюсами 17, выполненными из магнитомягкой стали. Полюса имеют чередующуюся северную и южную полярность.
Обратимые магниты 16 расположены между основанием электропостоянного магнита (магнитного захвата) 11 и полюсами 17 внутри катушек 13. Для обеспечения защиты от механических повреждений магнитный захват имеет корпус 18 из немагнитного материала, а его свободные полости заполнены, например, эпоксидным компаундом 19.
Если коэрцитивная сила основного магнита, например, из NdFeB марки N40 составляет 1000 кА/м, а обратимого магнита, например, из Альнико 5 имеет величину 48 кА/м, то параметры обмотки 13 и контроллера 5 выбираются таким образом, чтобы обмотка 13 была способна генерировать импульсы напряженности магнитного поля различной полярности, превышающей с необходимым запасом коэрцитивную силу обратимого магнита, но значительно ниже коэрцитивной силы основного магнита. Такие импульсы будут гарантировать изменение полярности переключаемого магнита 16 без влияния на намагниченность основного магнита.
Основание электропостоянного магнита 11 имеет ухо 20, предназначенное для присоединения магнитного захвата к штанге 6, к машине, буксировочному канату или к буксировочной цепи. В нем может располагаться шарнир (шарнирный подшипник) или упругий (демпфирующий) элемент, например, втулка из эластомера.
Шарниры или упругие элементы, через которые осуществляется присоединение магнитных захватов, обеспечивают возможность поворота магнитных захватов по одной, или двум, или трем осям, обеспечивая прилегание поверхностей каждого магнитного захвата в общем случае к криволинейной поверхности прицепного объекта с минимальными немагнитными зазорами.
По периметру магнитного захвата 4, либо по меньшей мере одного электропостоянного магнита 11, входящего в его состав, может быть установлено уплотнение из эластомера 21, защищенное снаружи от механических повреждений кожухом 22. В этом случае обратимые магниты 16 и полюса 17 имеют отверстия 23. Через эти отверстия, штуцеры 24 и соединительный шланг с помощью вакуумного насоса, расположенного на машине 1 или на самом магнитном захвате, из зоны соприкосновения магнитного захвата с поверхностью прицепного объекта осуществляется отсос воздуха Qв. Благодаря наличию этих конструктивных элементов реализуется комбинированный магнитно-вакуумный захват.
Тягово-сцепное устройство (его магнитный захват) может быть оснащено средством защиты и/или очистки поверхностей магнитного захвата и прицепного объекта от загрязнений, частиц грунта, снега, льда и посторонних предметов. Это средство может быть механическим (защитная шторка или щетка с приводом любого типа), пневматическим, гидравлическим, гидропневматическим, электротепловым или ультразвуковым. В частности, в качестве электротеплового средства очистки этих поверхностей может быть использована обмотка магнитного захвата, нагрев которой от протекания электрического тока, формируемого контроллером 5, обеспечивает нагрев обмоток 13, полюсов 17 и последующее таяние и удаление снега и льда с этих полюсов и с тех участков поверхности 3 прицепного объекта, с которыми соприкасаются эти полюса.
В случае реализации пневматической, гидравлической или гидропневматической очистки через отверстия 23 и штуцеры 24 на указанные поверхности от дополнительного насоса подается, соответственно, поток сжатого воздуха, жидкости (воды, смеси воды и метанола и т.д.) или смеси жидкости и сжатого воздуха Qo (фиг. 3).
Тягово-сцепное устройство может дополнительно содержать канатную или цепную лебедку 25 с ручным, электрическим, механическим или гидравлическим приводом, канат или цепь которой соединены с шарнирно присоединенной к машине прямой, V-, Y- или U-образной штангой 6 в ее удаленной части, либо с магнитным захватом 4. Лебедка обеспечивает возможность автоматического или механизированного подъема/опускания магнитного захвата 4 (штанги 6) на выбранный участок поверхности 3 прицепного объекта 2, а также возможность подъема этого объекта и передачи части его веса на машину 1 с целью снижения буксования ее гусениц или колес.
Если лебедка выполнена с электрическим приводом, то ее электродвигатель соединен с контроллером 5, который, в частности, реализует алгоритм автоматического или автоматизированного перемещения магнитного захвата на поверхность прицепного объекта, либо автоматическую передачу части веса прицепного объекта 2 на машину 1. Для обеспечения такой возможности тягово-сцепное устройство дополнительно содержит датчик положения штанги или усилия в канате или в цепи лебедки, соединенный с контроллером 5.
С целью предотвращения расцепления машины 1 с прицепным объектом 2 из-за динамических ударов в магнитном захвате 4, возникающих при начале движения (при трогании с места) и во время движения машины, тягово-сцепное устройство может быть оснащено упругим и/или демпфирующим устройством 26. Оно устанавливается последовательно с магнитным захватом, штангой, буксирным канатом, буксирной цепью, либо внутри штанги. Например, штанга может быть выполнена телескопической с пружиной или гильзой из эластомера внутри нее.
Тягово-сцепное устройство может содержать датчик приближения магнитного захвата к поверхности прицепного объекта, соединенный с контроллером, обеспечивающим формирование сигнала автоматического включения магнитного захвата и/или информационного сигнала для оператора о его готовности к работе в случае уменьшения этого расстояния до предварительно установленной величины.
Возможна также установка датчиков тягового усилия и ускорения (акселерометра), расположенных на магнитным захвате, на машине или на штанге, соединенных с контроллером 5. В этом случае схема управления контроллера обеспечивает формирование предупреждающего сигнала для оператора (машиниста) и/или сигнала управления трансмиссией машины из условия предотвращения перегрузки тягово-сцепного устройства и, соответственно, предотвращения отрыва магнитного захвата 4 от поверхности прицепного объекта.
Электропостоянный магнит 11, как правило, не допускает длительного пропускания электрического тока по его обмотке, поскольку это приводит к ее перегреву. Однако максимальная сила сцепления магнитного захвата с поверхностью прицепного объекта необходима в момент начала движения машины, в частности, для преодоления сил инерции. Поэтому, если усилия магнитного захвата недостаточно для начала транспортирования прицепного объекта, контроллер 5 после выявления начала движения машины кратковременно подает ток на обмотку 13 электропостоянного магнита 11, полярность которого соответствует увеличению его магнитной силы несмотря на то, что обратимый магнит уже перемагничен в нужном направлении. В данном случае сила сцепления с прицепным объектом увеличивается за счет суммирования магнитных потоков, создаваемых основным магнитом, обратимым магнитом и обмоткой 13.
В предложенном тягово-сцепном устройстве возможна также реализация автоматической установки магнитного захвата на поверхность прицепного объекта с помощью приводов его перемещения в вертикальной и/или горизонтальной плоскости. В этом случае на машину или на магнитный захват устанавливается видеокамера, соединенная с контроллером, осуществляющим обработку ее выходных сигналов и определяющим в результате этой обработки участок поверхности прицепного объекта, на который возможна установка магнитного захвата. Далее схема управления 8 формирует сигналы управления приводами из условия его перемещения на этот участок.
Тягово-сцепное устройство работает следующим образом.
В исходном состоянии обратимый магнит 16 электропостоянного магнита 11 магнитного захвата 4 намагничен таким образом, что его магнитный поток и магнитный поток основного магнита 15 направлены встречно. В этом состоянии магнитный захват выключен.
Если работа осуществляется в неблагоприятных условиях, рабочие поверхности магнитного захвата закрыты шторкой, обеспечивающей их защиту от загрязнений, снега, льда и т.п.
При приближении магнитного захвата к прицепному объекту 2 защитная шторка освобождает рабочие поверхности магнитного захвата, например, с помощью пружины или отдельного привода. Далее, в случае необходимости, включается очистка поверхности магнитного захвата и поверхности 3 прицепного объекта 2. Например, гидропневматическая. Ее суть заключается в одновременной подаче жидкости (воды или незамерзающей жидкости) и сжатого воздуха в зону контакта магнитного захвата с поверхностью объекта с помощью насоса (компрессора) через каналы 23. Сжатый воздух придает жидкости (воде) высокую турбулентность. При этом загрязнения, образовавшиеся на поверхностях магнитного захвата и прицепного объекта, от воздействия смеси воздуха и жидкости разрыхляются, увлекаются водно-воздушным потоком Qв и выводятся из зоны контакта магнитного захвата с прицепным объектом.
Перед началом движения машины 1 магнитный захват 4 в ручном или автоматическом режиме перемещается на ферромагнитную поверхность 3 прицепного объекта 2. При этом для реализации автоматического режима могут использоваться видеокамера (система технического зрения) и лебедка 25 или иной привод перемещения штанги 6, работающий под управлением контроллера 5.
В случае, когда магнитный захват состоит из нескольких шарнирно соединенных между собой электропостоянных магнитов 11, они располагаются на поверхности 3, которая в общем случае является криволинейной, с минимальным воздушным (немагнитным) зазором.
Далее схема управления 8 контроллера 5 работая по программе, записанной в его энергонезависимой памяти, в автоматическом режиме, в частности, по датчику приближения магнитного захвата к поверхности 3, или по сигналу с ручного органа управления (на фиг. 2 условно не показан) подает ток на обмотку 13 электропостоянного магнита 11. Обратимый магнит 16 перемагничивается и магнитные потоки основного Ф1 и обратимого магнита Ф2 становятся однонаправленными (фиг. 3). В результате этого возникает сила притяжения магнитного захвата 4 к поверхности 3 прицепного (буксируемого) объекта 2.
После начала движения машины 1 ее тяговое усилие FT через штангу 6 (буксирный канат, буксирную цепь), передается на магнитный захват и далее на прицепной объект 2. При этом контроллер 7 с помощью датчиков силы 9 и ускорения 10 контролирует величину тягового усилия (усилия буксировки) и формирует предупреждающий информационный сигнал или сигнал управления трансмиссией машины UT из условия предотвращения перегрузки магнитного захвата и его разъединения с прицепным объектом. Возникающие при этом динамические нагрузки сглаживаются упругим и/или демпфирующим устройством 26.
В случае повышенного буксования гусеничного или колесного движителя машины 1, а также при застревании прицепного объекта 2, контроллер 5 включает лебедку 25. Наличие вертикальной составляющей ее тягового усилия FL (фиг. 1) создает подъемную силу для прицепного объекта, а также обеспечивает передачу части его веса на машину 1, уменьшая ее буксование.
После окончания транспортирования (буксировки) прицепного объекта 2 контроллер 5 подает электрический ток на катушку 13 электропостоянного магнита 11 обратной полярности, обратимый магнит 16 перемагничивается, сумма магнитных потоков основного Ф1 и обратимого магнита Ф2 становится равной нулю, магнитный захват 4 отсоединяется от поверхности 3 прицепного объекта 2 и далее возвращается в транспортное положение.
Для специалистов в данной области техники понятно, что кроме описанных вариантов тягово-сцепного устройства возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
Индукторный генератор с совмещенными обмотками возбуждения и статора
Самоходная машина с двигателем внутреннего сгорания и электромеханической трансмиссией
Плавающая транспортная платформа
Гусеничная машина с гидростатической или электромеханической трансмиссией
Электромеханический тяговый модуль гусеничной машины
Гусеничный трактор с электромеханической трансмиссией
Электромеханическая трансмиссия самоходной машины
Промышленный тракторный агрегат с электромеханической трансмиссией
Система электрооборудования гусеничной машины
Тракторный агрегат с системой ограничения доступа к его управлению
Моторно-трансмиссионная установка рабочей машины
Устройство для определения положения рабочего органа машины
Индикаторное устройство рабочей машины

