Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ АКТИВНОГО ВЗВЕШИВАНИЯ ГРУЗА ДЛЯ ГОРНОПРОХОДЧЕСКОГО ОБОРУДОВАНИЯ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
[0001] Раскрытие относится к тяжелому оборудованию для погрузочных работ в области открытых карьеров, такому как управляемые человеком и/или автономные добычные экскаваторы, канатные скребковые экскаваторы и тому подобное, а более конкретно к системам, используемым на подобном оборудовании для активного измерения чистого веса вынутого материала при каждой загрузке.
[0002] При крупномасштабных поверхностных горных работах огромная доля проходческого оборудования используется для выемки и загрузке материала. Выемку обычно проводят с помощью добычных экскаваторов с емкостью ковша в десятки тонн на ковш.
[0003] Для определения чистого веса материала в ковше добычного экскаватора, когда его загружают в грузовой автомобиль, были разработаны системы измерения. Однако, при определении, что чистый вес груза превышает требующуюся массу, проходческое оборудование может быть вынуждено сваливать вынутый материал, вызывая увеличение времени цикла выемки, создавая угрозу безопасности и, таким образом, более высокие общие затраты на оплату труда и техническое обслуживание.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Предоставлен способ и система активного определения массы груза для горнопроходческого оборудования. В одном варианте осуществления сканируется поверхность выемки, на основании отсканированной поверхности определяется форма поверхности выемки, по горнопроходческому оборудованию определяется траектория выемки, на основании по меньшей мере формы поверхности выемки и траектории выемки горнопроходческого оборудования рассчитывается объем материала, вынутого с помощью горнопроходческого оборудования, а на основании по меньшей мере одного коэффициента плотности рассчитывается масса материала, вынутого с помощью горнопроходческого оборудования.
[0005] В варианте осуществления сканирование поверхности выемки включает сканирование поверхности выемки, окружающей горнопроходческое оборудование с использованием множества лазерных сканирующих устройств и генерированием множества элементов данных на основании множества изображений, генерируемых множеством лазерных сканирующих устройств.
[0006] В варианте осуществления определение формы поверхности выемки включает объединение множества изображений в трехмерную модель поверхности выемки, получение множества наборов координат каждого из множества изображений, и определение формы поверхности выемки на основании множества наборов координат.
[0007] В варианте осуществления по мере того, как горнопроходческое оборудование движется по забою, положение ковша регистрируется с использованием датчиков положения и определяется траектория выемки для горнопроходческого оборудования, при этом определение траектории выемки для горнопроходческого оборудования включает разделение множества элементов данных на множество групп и расчет полиномиальных коэффициентов для каждой из множества групп, получение множества наборов координат каждого из множества изображений впереди горнопроходческого оборудования, и определение траектории выемки на основании множества наборов координат.
[0008] В варианте осуществления, в котором расчет объема материала, вынутого с помощью горнопроходческого оборудования, включает расчет значения разницы площадей между формой поверхности выемки и траектории выемки и включение значения разницы площадей в общий объем материала, вынутого с помощью горнопроходческого оборудования, в ответ на определение, что значение разницы площадей представляет собой положительное значение.
[0009] В варианте осуществления, если известно значение площади, удаляемой за единственный срез, расчет массы материала в ковше горнопроходческого оборудования включает определение объема материала в ковше для каждого среза или посредством умножения значения площади, удаляемой ковшом за единственный срез, на значение ширины ковша горнопроходческого оборудования, определение массы материала в ковше посредством умножения объема материала в ковше на коэффициент плотности, расчет массы материала с использованием одного из способов расчета массы, известных в данной области (напр., метод после копания), определение первого коэффициента плотности посредством деления массы материала, определенной с помощью одного из способов расчета массы, известных в данной области, на объем материала, проверка, что масса материала, определенная с помощью одного из способов расчета массы, описанных в представленном раскрытии, находится в пределах предварительно определенной границы посредством сравнения массы материала, определенной с помощью одного из способов расчета массы, известных в данной области, с массой материала, определенной с помощью второго способа расчета массы, с использованием второго коэффициента плотности, в ответ на проверку, что масса материала, определенная с помощью одного из способов расчета массы, описанных в представленном раскрытии, находится в пределах предварительно определенной границы, сохранение первого коэффициента плотности в базе данных.
[0010] В варианте осуществления, в котором расчет объема материала, вынутого с помощью горнопроходческого оборудования, включает использование 3D модели забоя, представленной в вокселях, так что можно сравнивать траекторию копания и форму забоя, и может быть определено, что были удалены все воксели между формой забоя и траекторией копания. Так как объем каждого вокселя известен, может быть расчитан общий удаленный объем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
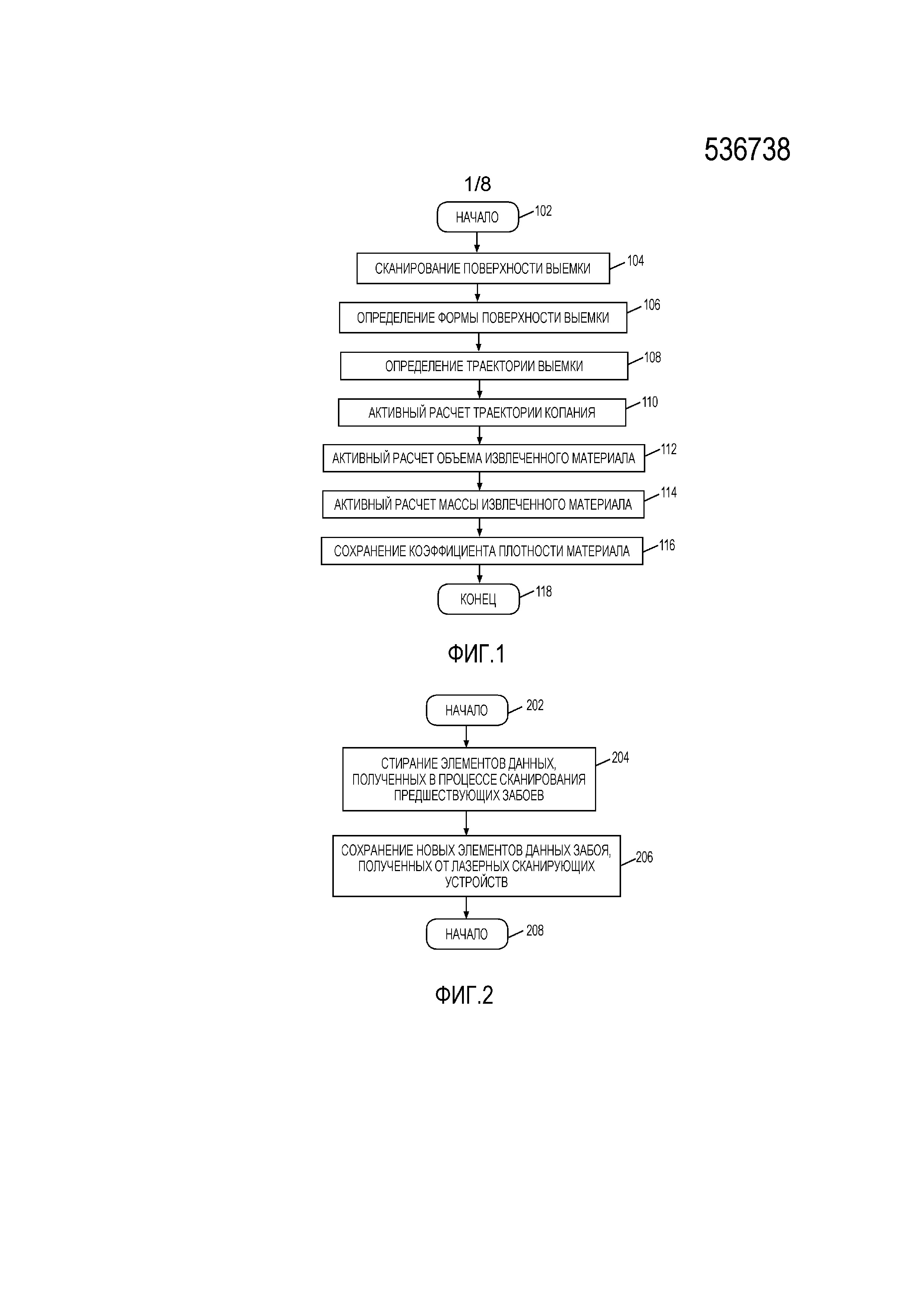
[0011] ФИГ. 1 иллюстрирует способ определения активной массы груза для горнопроходческого оборудования в соответствии с вариантом осуществления;
[0012] ФИГ. 2 иллюстрирует способ получения информации о забое в соответствии с вариантом осуществления;
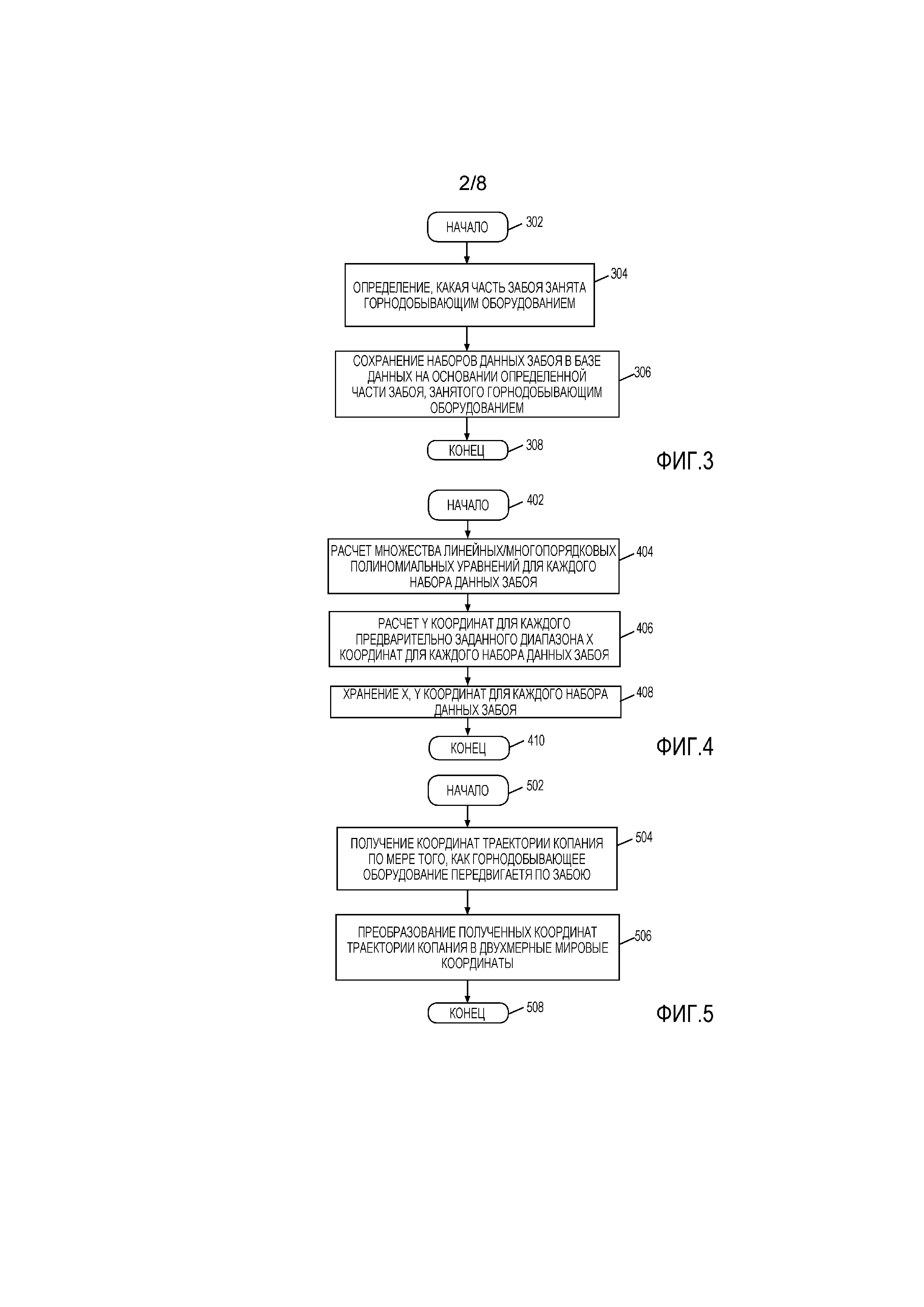
[0013] ФИГ. 3 иллюстрирует способ определения поверхности копания в соответствии с вариантом осуществления;
[0014] ФИГ. 4 иллюстрирует способ определения двумерных координат забоя в соответствии с вариантом осуществления;
[0015] ФИГ. 5 иллюстрирует способ получения траектории копания для проходческого оборудования;
[0016] ФИГ. 6 иллюстрирует способ расчет пар координат для копания в соответствии с вариантом осуществления;
[0017] ФИГ. 7 иллюстрирует способ расчета площади, извлеченной проходческим оборудованием;
[0018] ФИГ. 8 иллюстрирует способ расчета массы материала в ковше;
[0019] ФИГ. 9 иллюстрирует способ сохранения значения коэффициента плотности материала;
[0020] ФИГ. 10 иллюстрирует иллюстративную блок-схему высокого уровня иллюстративного компьютера, которая может быть использована для осуществления измерения активной массы груза для горнопроходческого оборудования;
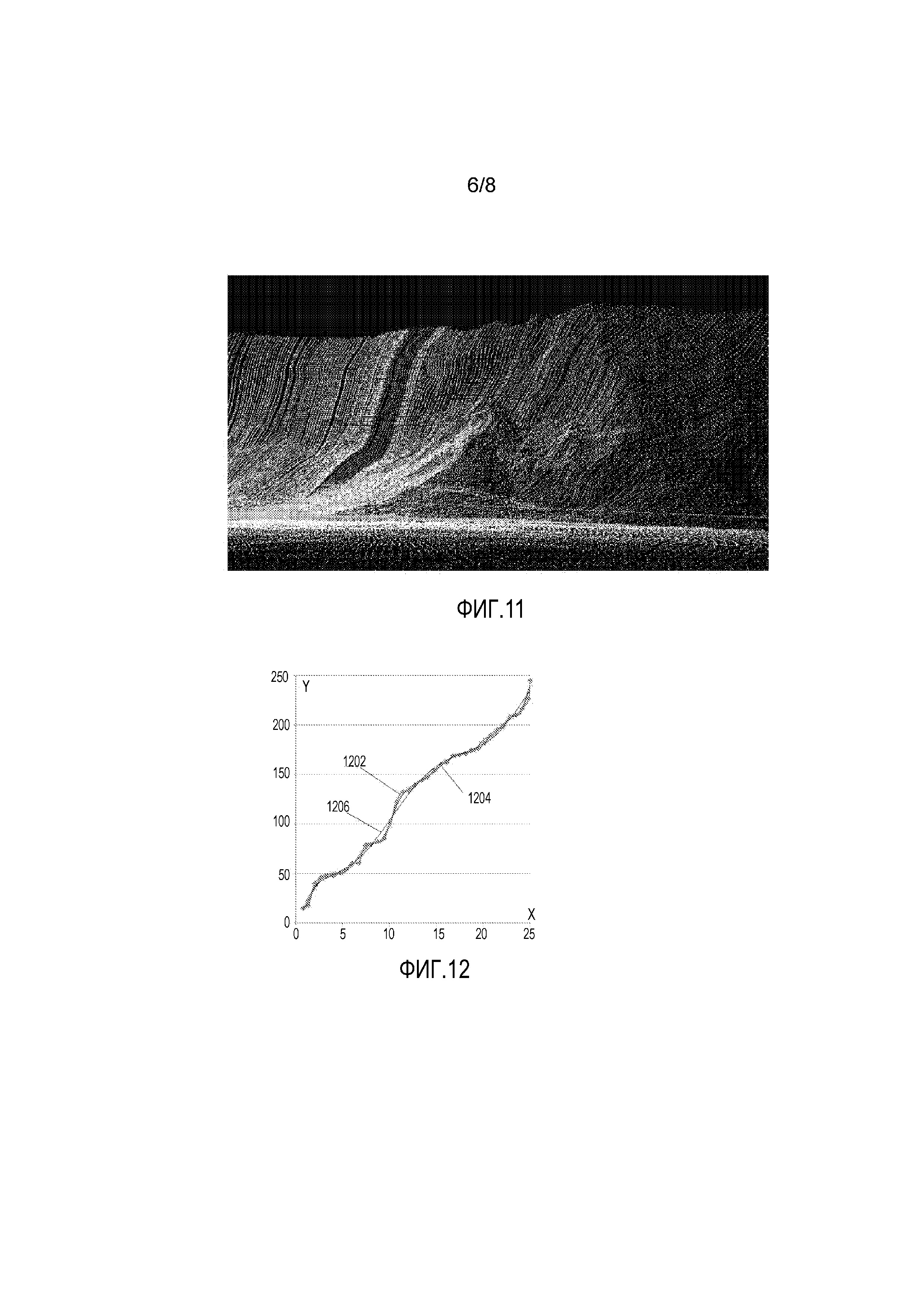
[0021] ФИГ. 11 иллюстрирует трехмерную модель забоя;
[0022] ФИГ. 12 иллюстрирует графическое представление забоя в виде полиномов;
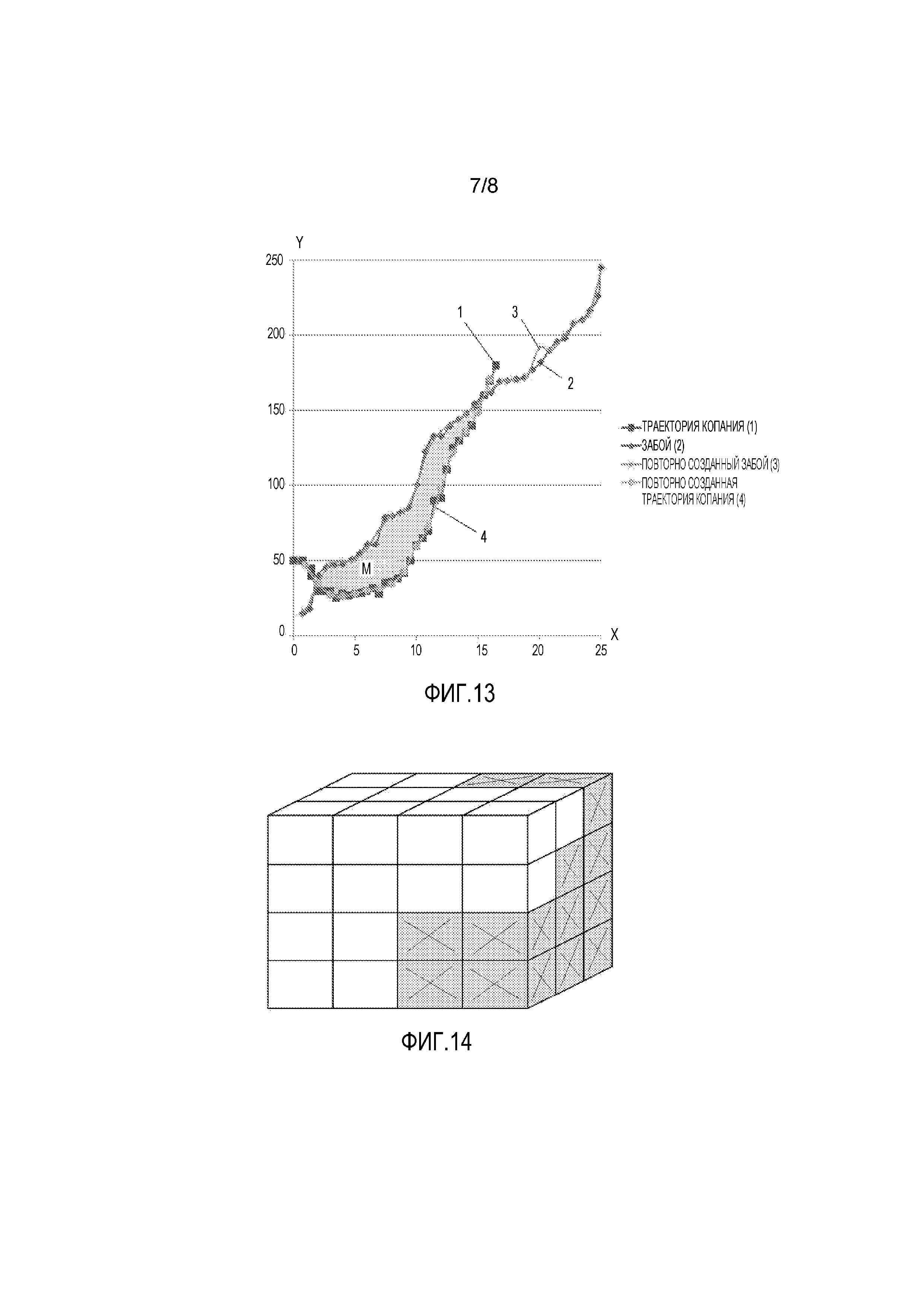
[0023] ФИГ. 13 иллюстрирует графическое представление материала, извлеченного из забоя;
[0024] ФИГ. 14 показывает иллюстративный забой, представленный в трехмерном вокселе;
[0025] ФИГ. 15 иллюстрирует трехмерную модель забоя с использованием вокселей; а
[0026] ФИГ. 16 иллюстрирует вид сбоку забоя, представленный в вокселях, а также траекторию копания.
ПОДРОБНОЕ ОПИСАНИЕ
[0027] Предоставлен способ и система активного определения массы груза для горнопроходческого оборудования.
[0028] ФИГ. 1 показывает иллюстративный способ 100 активного определения массы материала, вынутого с помощью горнопроходческого оборудования, согласно варианту осуществления. Способ 100 начинается на стадии 102. На стадии 104 сканируется поверхность выемки для определения формы поверхности выемки (т.е. забоя). Поверхность выемки может быть отсканирована с использованием множества лазерных сканирующих устройств, выполненных с возможностью обеспечения сканирования окружающей среды. Множество лазерных сканирующих устройств может быть локально установлено на горнопроходческом оборудовании или установлено дистанционно. Дистанционно установленные лазерные сканирующие устройства могут быть соединены с возможностью связи с оборудованием посредством проводных и/или беспроводных приемопередатчиков.
[0029] ФИГ. 2 показывает иллюстративный способ 200 получения информации о забое. Способ 200 может быть реализован с выполнением стадии 104 фиг. 1. Способ 200 начинается на стадии 202, когда от множества лазерных сканирующих устройств получают новые данные о забое (напр., множество лазерных изображений забоя). На стадии 204 все элементы данных, полученные в процессе сканирования предшествующих забоев, стирают из устройства хранения данных для сохранения лазерных изображений предварительно отсканированных забоев. В варианте осуществления значения коэффициента плотности, соответствующие множеству типов материала, остаются для сохранения в устройстве хранения данных для сохранения значений коэффициента плотности. Значения коэффициента плотности подлежат использованию для расчета количества материала, вынимаемого в будущем.
[0030] На стадии 206 новые данные о забое, полученные от множества лазерных сканирующих устройств, сохраняется в устройстве хранения данных для сохранения лазерных изображений забоев. Новая информация о забое содержит множество параметров, определяющих поверхность выемки, объекты и/или топографию, которые могут препятствовать действиям экскаватора и/или транспортных средств в области экскаватора и/или буксирующих машин, связанных с экскаватором. Способ 200 заканчивается на стадии 208, и управление снова переходит к способу 100 фиг. 1.
[0031] Возвращаясь к ФИГ. 1, на стадии 106, производится определение относительно того, какая часть данных забоя занята горнопроходческим оборудованием (т.е. определяется забой под погрузкой) и рассчитывается форма забоя. ФИГ. 3 показывает иллюстративный способ 300 определения поверхности копания. Способ 300 может использоваться для реализации первой части стадии 106 способа 100, проиллюстрированного на фиг. 1. Способ 300 начинается на стадии 302, когда горнопроходческое оборудование входит в забой. На стадии 304 производится определение относительно того, какая часть данных забоя занята горнопроходческим оборудованием. Как отмечалось выше, форма забоя может быть определена с помощью лазерных сканирующих устройств, которые установлены на проходческом оборудовании. По мере того как машина поворачивается, данные сканирующие устройства снимают показания вертикального расстояния. Затем данные изображения складывают вместе для создания 3D модели. Фиг. 11 показывает иллюстративную 3D модель, сгенерированную на основании лазерных изображений забоя.
[0032] Форма забоя определяется посредством анализа X и Y (т.е. горизонтальной и вертикальной) координат изображений, сделанных около передней части экскаватора. Когда горнопроходческое оборудование занимает забой, на основании угла горнопроходческого оборудования происходит определение относительно того, какое из изображений фактически занимает горнопроходческое оборудование. Местоположение ковша горнопроходческого оборудования определяется на основании обратной связи по положению, полученной от датчиков движения. Используя геометрический расчет значения датчиков положения могут быть преобразованы в ту же самую систему X/Y координат, которая используется лазерными сканирующими устройствами таким образом, чтобы координаты X и Y изображений, генерируемых лазерными сканирующими устройствами, можно было сравнивать с X и Y координатами, рассчитанными на основании значений датчиков положения. На стадии 306 количество наборов данных забоя сохраняется для использования для расчетов объема и массы. Способ 300 заканчивается на стадии 308, а управление передается способу расчета форма забоя.
[0033] ФИГ. 4 иллюстрирует способ 400 расчета формы забоя согласно первому варианту осуществления. Способ 400 может использоваться для реализации второй части стадии 106 способа 100, проиллюстрированного на фиг. 1. Способ 400 начинается на стадии 402 при завершении способа 300 определения поверхности копания. На стадии 404 рассчитывается множество линейных или многопорядковых полиномиальных уравнений. Конкретно, используя элементы данных, полученные для траектории забоя, рассчитываются линейные или полиномиальные уравнения для представления каждой из кривых траектории забоя и траектории копания. В варианте осуществления для того, чтобы повысить точность расчета, кривые каждой из траектории забоя и траектории копания не отображаются единственным уравнением. Вместо этого, каждая из траектории забоя и траектории копания разбивается на маленькие подсегменты кривых, и для каждой маленькой части каждой кривой рассчитываются коэффициенты. Расчет коэффициентов для каждой маленькой части кривых будет приводить к аномалиям, влияющим только на коэффициенты на маленьких площадях, улучшая посредством этого точность расчетов.
[0034] На стадии 406 с использованием множества линейных или многопорядковых полиномиальных уравнений, установленных на стадии 404, рассчитываются Y координаты для предварительно определенного диапазона X координат, чтобы сгенерировать Y координаты для известного X диапазона.
[0035] На стадии 408 сохраняются параметры формы забоя (координаты X и Y), а на стадии 410 способ 400 возвращает управление способу 100 фиг. 1.
[0036] Возвращаясь к ФИГ. 1, на стадии 108 получают траекторию, по которой горнопроходческое оборудование движется по забою (т.е. траекторию копания). ФИГ. 5 показывает иллюстративный способ 500 получения траектории копания. Способ 500 может использоваться для осуществления стадии 108 фиг. 1. Способ 500 начинается на стадии 502 и на стадии 504, координаты траектории копания получают по мере того, как горнопроходческое оборудование продвигается через забой. В варианте осуществления координаты траектории копания получают с использованием одного или более датчиков движения, установленных на экскаваторе горнопроходческого оборудования. На стадии 506 полученные координаты траектории копания трансформируются в координаты X и Y. На стадии 508 способ 500 заканчивается, а управление переходит в способ 100 фиг. 1.
[0037] На стадии 110 фиг. 1 траектория копания рассчитывается активно. В варианте осуществления для активного расчета траектории копания должны сохраняться пары координат X и Y траектории копания. ФИГ. 6 показывает иллюстративный способ 600 активного расчета траектории копания. Способ 600 может использоваться для осуществления стадии 110 фиг. 1. Способ 600 начинается на стадии 602. На стадии 604 траектория копания делится на множество маленьких групп. На стадии 606 рассчитываются коэффициенты для каждой маленькой группы, с созданием линейных или многопорядковых полиномиальных уравнений способом аналогичным стадии 404 способа 400, описанного выше. На стадии 608 с использованием данных линейных или многопорядковых полиномиальных уравнений координаты Y рассчитываются для того же самого предварительно установленного диапазона координат X, который был использован на стадии 406 способа 400, описанного выше. На стадии 610 способ 600 заканчивается, и управление переходит в способ 100 фиг. 1.
[0038] Фиг. 12 иллюстрирует активное генерирование формы забоя. В частности Фиг. 12 показывает воссозданную форму (1202) забоя, при этом воссозданная форма забоя представляет забой в виде одного полинома (1206), и воссозданная форма забоя, представляет забой в виде множества полиномов (1204). Как можно понять из графика, использование множества полиномов для представления формы забоя является более точным и приводит к более точным расчетам.
[0039] Поскольку как траектория забоя, так и траектория копания теперь имеют координаты Y для всех тех же самых значений X, можно рассчитать, какая площадь была извлечена. Для каждой последовательной координаты X для траектории забоя и траектории копания может быть рассчитана площадь под кривой. На стадии 112 фиг. 1 рассчитывается извлеченная площадь. ФИГ. 7 показывает иллюстративный способ 700 расчета извлеченной площади. Способ 700 может использоваться для осуществления способа расчета извлеченной площади на стадии 112 способа 100 на фиг. 1. Способ 700 начинается на стадии 702.
[0040] В варианте осуществления уравнение для расчета площади под кривыми может быть представлено, как: Площадь=0,5⋅ΔХ⋅[(Yзабой1+Yзабой2) - (Yкопание1+Yкопание2)], где ΔX представляет собой изменение значения x между двумя координатами X; Yзабой1 представляет собой высоту забоя на первой координате; Yзабой2 представляет собой высоту забоя на второй координате; Yкопание1 представляет собой высоту траектории копания на первой координате; а Yкопание2 представляет собой высоту траектории копания на второй координате. Следует понимать, что уравнение, представленное выше, является иллюстративным уравнением и что площадь под кривыми может быть рассчитана с использованием других уравнений.
[0041] На стадии 704 для каждой последовательной координаты X для траектории забоя и траектория копания может быть рассчитана площадь под кривой. Если площадь под кривой забоя больше, чем площадь под траекторией копания, можно заключить, что разница между ними представляет собой материал, который был извлечен. Если площадь под траекторией копания больше, чем забой, горнопроходческое оборудование должно передвигаться над забоем. Данный расчет может быть проделан для всех значений X, при этом сумма всех действительных площадей содержит площадь материала, который был извлечен.
[0042] На стадии 706 производится определение относительно того, является ли рассчитанная разница площадей положительной или отрицательной. Если определено, что рассчитанная разница площадей является положительной, способ 700 продолжается на стадии 708, на которой положительная площадь учитывается для подтвержденной площади. Если определено, что рассчитанная разница площадей является отрицательной, способ 700 продолжается на стадии 710, на которой отрицательная площадь не учитывается, потому что рассчитанная отрицательная площадь является показателем, что горнопроходческое оборудование движется над забоем. На стадии 712 рассчитывается и сохраняется значение для рассчитанной подтвержденной площади. Способ 700 заканчивается на стадии 714, и управление снова переходит к способу 100 фиг. 1.
[0043] Фиг. 13 иллюстрирует расчет площади траектории копания (линия 1), потенциальный забой (линия 2), и площадь M между ними, которая считается материалом, подлежащим извлечению:
[0044] Возвращаясь к ФИГ. 1, на стадии 114 масса материала в ковше рассчитывается на основании извлеченной площади. ФИГ. 8 иллюстрирует способ 800 для расчета массы материала в ковше согласно варианту осуществления. Способ 800 может использоваться для определения массы материала в ковше. Способ 800 начинается на стадии 802. На стадии 804 объем извлеченного материала определяется посредством умножения рассчитанной извлеченной площади на известную ширину ковша. Следует понимать, что для того, чтобы повысить точность, расчеты на предшествующих стадиях можно проводить для всех изображений занятого забоя. На стадии 806 определенный объем материала сохраняется в памяти. На стадии 808 масса извлеченного материала определяется посредством умножения сохраненного объема материала на значение коэффициента плотности, хранящегося в устройстве хранения данных, для сохранения значений коэффициента плотности. На стадии 810 сохраняется рассчитанная масса материала. На стадии 812 производится определение относительно того, все ли еще горнопроходческое оборудование занято в забое. Если определено, что горнопроходческое оборудование все еще занято в забое, способ 800 продолжается на стадии 814, на которой повторяются стадии способа 500. Если определено, что горнопроходческое оборудование больше не занято в забое, способ 800 заканчивается на стадии 816, и управление возвращается в способ 100.
[0045] В способе расчета объема материала в ковше согласно второму варианту осуществления задействуется 3D модель забоя, представленная в вокселях. Данный способ может использоваться вместо расчета объема на стадии 804 фиг. 8. Фиг. 14 иллюстрирует воксель - 3D-образный короб, который либо «включен», либо «выключен». Если какое-либо сканирующее устройство, используемое для сканирования забоя, проиллюстрированного на Фиг. 15, обнаруживает объект внутри определенного вокселя, считается, что данный воксель находится во «включенном» состоянии (затемненном и содержащем маркированные «x» блоки). Пользователь управляет размерами вокселя, которые будут зависеть от окружающей среды и типа лазерных сканирующих устройств.
[0046] С забоем, представленным в вокселях, можно сравнивать траекторию копания и форму забоя. Фиг. 16 иллюстрирует вид сбоку забоя (воксели во ‘включенном состоянии’, представленные в затемненных блоках, содержащих метку «x» и обозначенные, как «1») и траекторию копания (показанную линией «2»). Следует понимать, что поскольку лазерные сканирующие устройства не могут сканировать через материал, только часть забоя, которая является видимой, будет являться передней частью забоя. Можно предположить, что в забое нет отверстий и все воксели позади отсканированных точек также должны считаться во ‘включенном состоянии’.
[0047] Может быть определено, что были удалены все воксели между формой забоя (затемненные блоки 1, помеченные меткой «x») и траекторией копания (линия 2). Поскольку объем каждого вокселя известен, может быть рассчитан общий удаленный объем. Следует понимать, что описанный анализ должен быть проделан для всех вокселей, в которых занято горнопроходческое оборудование.
[0048] После того как объем материала рассчитывается с использованием одного из двух способов, описанных выше, рассчитанный объем умножается на коэффициент плотности. Подобный расчет будет предоставлять массу ковша. Так как плотность материала может зависеть от множества факторов, коэффициент плотности может быть рассчитан посредством использования системы расчета массы груза после копания. Пример системы расчета массы груза после копания подробно описан в патенте США № 8373078 «System and Method for Load Measuring by Motor Torque», выданном 12 февраля 2013 года, который включен в данный документ посредством ссылки во всей своей полноте.
[0049] Возвращаясь к ФИГ. 1, на стадии 116 способа 100 сохраняется коэффициент плотности. ФИГ. 9 показывает иллюстративный способ 900 сохранения коэффициента плотности. Способ 900 начинается на стадии 902. На стадии 904 производится определение относительно того, находится ли масса материала в пределах допустимой границы. Каждый раз, когда горнопроходческое оборудование заканчивает свою работу, значение массы материала, рассчитанное посредством умножения объема на коэффициент плотности, сравнивается с определенным диапазоном. Данный диапазон зависит от физических возможностей и размера машины.
[0050] Если определено, что масса материала не находится в пределах допустимой границы, способ 900 заканчивается на стадии 908, и управление возвращается в способ 100. Если определено, что масса материала находится в пределах допустимой границы, способ 900 продолжается на стадии 906, на которой объем материала сравнивается со значением массы, предоставленным другой системой расчета массы груза.
[0051] На стадии 910 производится определение относительно того, находится ли значение нового коэффициента плотности в пределах допустимого диапазона предварительно рассчитанного коэффициента плотности. Если обнаружена разница между рассчитанным в данный момент значением рассчитанного коэффициента плотности и предварительно рассчитанным коэффициентом плотности, обнаруженная разница значений коэффициента плотности используется для модификации коэффициента плотности после каждого цикла. Затем обновленный коэффициент плотности будет использоваться для следующей итерации. Если определено, что значение коэффициента плотности отличается более чем на допустимый предел, способ 900 продолжается на стадии 914, на которой генерируется и отображается ошибка.
[0052] Следует понимать, что изменение значения коэффициента плотности более чем на допустимый предел может происходить по причине некорректных расчетов, некорректных (напр., испорченных) данных или фактического изменения плотности материала. При генерировании и отображении ошибки способ 900 продолжается на стадии 916, на которой способ 916 заканчивается. Если на стадии 910 определено, что значение коэффициента плотности не отличается от предыдущих результатов более чем на допустимый предел, способ 900 продолжается на стадии 912, на которой недавно рассчитанный коэффициент плотности сохраняется для использования для следующей итерации. Затем, способ 900 продолжается на стадии 916, на которой способ 916 заканчивается, а управление возвращается в способ 100.
[0053] Следует понимать, что множество датчиков, таких как проприоцептивные датчики, отвечающие за мониторинг автоматического технического обслуживания и управление внутренним состоянием, могут 1() предоставлять большое разнообразие информации, касающейся горнопроходческого оборудования, такой как угол измерения, с которым горнопроходческое оборудование расположено относительно забоя, измеренная мощность двигателя и/или крутящий момент, связанные с горнопроходческим оборудованием и тому подобное, для определения и/или оптимизации процедуры выемки. Информация от множества экстероцептивных датчиков (напр., приближения) может использоваться для расчета и/или определения двумерной и/или трехмерной модели поверхности выемки. Двумерная и/или трехмерная модель поверхности выемки может подсказываться операторам проходческого оборудования или автономной системе управления горнопроходческого оборудования.
[0054] Следует понимать, что информация, определенная множеством лазерных сканирующих устройств, может беспроводным образом передаваться горнопроходческому оборудованию. В варианте осуществления передаваемая беспроводным образом информация может предоставляться информационному устройству и/или удаленному серверу. Полученная беспроводным образом информация может сохраняться в запоминающем устройстве и/или сообщаться дистанционно посредством клиентского информационного устройства. Клиентское информационное устройство может воспроизводить и/или аккумулировать данные для множества землеройных машин, буксирующих машин, подъемных установок, смен, временных периодов, операторов, дежурных систем управления и/или горных выработок для предоставления возможности передачи отчетов и/или анализа.
[0055] В варианте осуществления горнопроходческое оборудование может беспроводным образом получать информацию, такую как весовая информация, от удаленного беспроводного передатчика, связанного, например, с сервером и/или клиентским информационным устройством. Полученная информация может, например, быть показателем, должен ли быть материал в ковше горнопроходческого оборудования загружен на буксирующую машину. Полученная информация может содержать индекс буксирующих машин, присвоенный проходческому оборудованию, связанную с производительностью информацию, связанную с выемкой материала, и/или рекомендации по ремонту, связанные с проходческим оборудованием, и т.д.
[0056] ФИГ. 10 представляет собой блок-схему иллюстративного компьютера высокого уровня, которая может быть использована для осуществления заблаговременного определения массы груза для горнопроходческого оборудования. Компьютер 1000 содержит процессор 1001, функционально соединенный с устройством 1002 хранения данных, и память 1003. Процессор 1001 управляет общей работой компьютера 1000 посредством выполнения команд компьютерной программы, которая определяет подобные работы. Команды компьютерной программы могут храниться в устройстве 1002 хранения данных или на другом машиночитаемом носителе и при необходимости загружаться в память 1003 при выполнении команд компьютерной программы. Таким образом, стадии иллюстративных способов фигур 1-9 могут определяться командами компьютерной программы, сохраненными в памяти 1003 и/или в устройстве 1002 хранения данных и управляться процессором 1001, выполняющим команды компьютерной программы. Например, команды компьютерной программы могут быть реализованы в виде выполняемого компьютером кода, запрограммированного квалифицированным специалистом в данной области, для выполнения алгоритма, определяемого стадиями способа фигур 1-9. Соответственно, посредством выполнения команд компьютерной программы процессор 1001 выполняет алгоритм, определяемый стадиями способа фигур 1-9. Компьютер 1000 также содержит один или более сетевых интерфейсов 1005 для связи с другими устройствами посредством сети. Компьютер 1000 также содержит одно или более устройств 1004 ввода/вывода, которые обеспечивают пользователю возможность взаимодействия с компьютером 1000 (напр., дисплей, клавиатура, мышь, динамики, клавиши и т.д.).
[0057] Процессор 1001 может включать в себя микропроцессоры как общего, так и специального назначения, и может представлять собой единственный процессор или один из множества процессоров компьютера 1000. Процессор 1001 может содержать, например, один или более блоков (CPU) центральной обработки. Процессор 1001, устройство 1002 хранения даны, и/или память 1003 могут содержать, быть дополненными или встроенными в одну или более специализированных заказных интегральных схем (ASIC) и/или одну или более программируемых пользователем вентильных матриц (FPGA).
[0058] Каждое из устройства 1002 хранения данных и памяти 1003 содержит материальный энергонезависимый машиночитаемый информационный носитель. Каждое из устройства 1002 хранения данных и памяти 1003 может содержать высокоскоростное оперативное запоминающее устройство, такое как динамическое оперативное запоминающее устройство (DRAM), статическое оперативное запоминающее устройство (SRAM), синхронное динамическое оперативное запоминающее устройство с удвоенной скоростью передачи данных (DDR RAM) или другие устройства с твердотельной памятью с произвольной выборкой и может содержать энергонезависимую память, такую как одно или более запоминающих устройств на магнитных дисках, таких как внутренние жесткие диски и съемные диски, запоминающие устройства на магнитооптическом диске, запоминающие устройства на оптическом диске, устройства флэш памяти, полупроводниковые запоминающие устройства, такие как стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), постоянное запоминающее устройство на компактных дисках (CD-ROM), диски постоянного запоминающего устройства (DVD-ROM) на универсальных цифровых дисках или другие энергонезависимые твердотельные запоминающие устройства.
[0059] Устройства 1004 ввода/вывода могут содержать периферийное оборудование, такое как принтер, сканер, экран дисплея и т.д. Например, устройства 1004 ввода/вывода могут содержать отображающее устройство, такое как катодно-лучевая трубка (CRT), монитор плазменного или жидкокристаллического дисплея (LCD) для отображения информации пользователю, клавиатуру и указывающее устройство, такое как мышь или шаровой манипулятор, с помощью которого пользователь может обеспечивать ввод в компьютер 1000.
[0060] Квалифицированный специалист в данной области должен знать, что исполнение фактического компьютера или компьютерной системы может иметь другие конструкции и может также содержать другие составные элементы, и что ФИГ. 10 представляет собой изображение высокого уровня некоторых составных элементов подобного компьютера для иллюстративных целей.
Разработка, тестирование и демонстрация решений автоматизации с использованием виртуальных компьютеров на основе web и vpn туннелирования
Линия непрерывного травления с наклонным расширяющимся уплотнителем
Автоматизированное устройство разгрузки контейнеров с грузом на платформе и способ его применения
Ограничение пикового отбора электроэнергии карьерными экскаваторами
Кантователь рулонов
Регенеративный виткоукладчик
Системы, устройства и способы для управления реактивной мощностью
Система и способ для повторного ввода энергии торможения в базирующийся на контактной сети электрический откатный грузовик горной выработки
Способ коррекции медленного раскачивания путем нагревания и быстрого охлаждения
Способ и устройство управления гибридным поездом
Способ и система для предварительного определения веса груза для карьерного экскаваторного оборудования
Оптимизация динамического движения землеройных машин
Способ и устройство для определения n+1-мерной модели окружающей среды и добывающее устройство
Система управления рукоятью экскаватора

