Результат интеллектуальной деятельности: Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота
Вид РИД
Изобретение
Изобретение относится к области наземного и космического транспортного машиностроения, а также к робототехнике, главным образом к самоходным роботам конфигурации (типа) «Гантель».
Известны одноосные роботы-«гантели», в частности малогабаритный робот «Скаут», содержащие разнесенные по его ширине приводные колеса (движитель), цилиндрический корпус между ними для «полезной нагрузки» и электромеханический привод колес, при этом диаметр корпуса меньше диаметра колес, с образованием дорожного просвета (клиренса) и гантелевидной конфигурации [см. 1. Пат US 7,559.385 B1, М. кл. В60K 1/00, B62D 61/00, 14.07.2009; 2. Заявка US 2003/0137168 A1, М. кл. B25J 9/18, 24.07.2003; 3. Пат. US 6,502,657 B2, М. кл. 07/01/2007, 07.01.2003; 4. Американцы бросили в тюрьму робота-гантель. - Доступно на: http.//www.membrana.ru/particle/13211].
Однако в них не используются механизмы передач и поворота (МПП), широко представленные в теории и практике крупногабаритных, в основном гусеничных транспортных машин и позволяющих получать широкую гамму радиусов поворота в условиях возрастания сопротивления повороту.
Другим примером одноосного транспортного средства может служить устройство с разнесенными по его ширине полусферическими приводными колесами (движителем) и корпус для «полезной нагрузки» между ними, при этом днище корпуса возвышается над опорной поверхностью, образуя дорожный просвет (клиренс) [см. 5. Пат RU 2584292 C1, М. кл. B62D 57/00, B62D 61/00, B62D 63/02, В62К 1/00, В60B 1/14, 20.05.2016, Бюл. №14].
Это запатентованное устройство практически повторяет другие, ранее известные устройства двухосных наземных транспортных средств с цилиндрическими или полусферическими колесами и механическим приводом (трансмиссией) от ДВС [см. 6. Юрий Пошалок. WORDLS of TANKS. Стальные шары Сталина. Конструирование и производство. - TACTICAL PRESS, 2014 (ISBN 978-5-906074-10-2). - С. 79 (последний абз.), 80 (схема), 81].
Гантелевидность конфигурации всех перечисленных роботов-аналогов обусловлена стремлением их конструкторов к обеспечению высоких показателей профильной проходимости и поворотливости (маневренности) путем увеличения дорожного просвета (клиренса), что особенно важно для малогабаритных роботов, предназначенных для использования на местности с выраженными макронеровностями. В то же время размещение относительно больших силовых установок (двигателей) и механической части привода к колесам в корпусе (в средней части корпуса по ширине транспортного средства) вступает в противоречие и препятствует этой тенденции, поскольку увеличение диаметра корпуса обратно пропорционально уменьшению дорожного просвета.
Наиболее близким к заявляемому устройству по назначению и совокупности существенных конструктивных признаков является привод транспортного средства (гусеничная быстроходная транспортная машина) с двухпоточным бесступенчатым механизмом передач и поворота (МПП), содержащий первый двигатель, создающий первый поток мощности через механизм передач, с возможностью прямолинейного движения транспортного средства, и второй двигатель, создающий второй поток мощности через механизм поворота, с возможностью поворота транспортного средства, разнесенные по ширине транспортного средства суммирующие планетарные ряды, два входных звена каждого из которых соединены с первым и вторым двигателем соответственно, а выходное звено - с соосными колесами транспортного средства, а также распределительную зубчатую передачу разнонаправленного вращения бортовых ветвей механизма поворота с общим ведущим звеном [см.: Расчет и конструирование гусеничных машин / Носов Н.А, Галышев В.Д., Волков Ю.П., Харченко А.П. - Под ред. проф. Н.А. Носова. - Л.: Машиностроение, 1972. - 560 с. - С. 395, Рис. IX.21а].
В известном приводе двигатели расположены (по ширине транспортного средства) в центральной части - над дорожным просветом транспортного средства, с перекрытием днищем. А упомянутая распределительная передача выполнена в виде передачи из трех зубчатых колес - центрального ведущего и периферийных ведомых с разнонаправленным вращением (разводка по левой и правой ветвям механизма поворота). Причем она расположена тоже над дорожным просветом транспортного средства, параллельно осям колес транспортного средства.
Компоновка привода с МПП на гусеничных и колесных многоопорных транспортных средствах (4×2, 4×4, 6×6 и др.) не вызывает серьезных компоновочных проблем благодаря, в частности, возможности расположения МПП «горизонтально» - когда невыгодно удаленная общая ось бортовых ветвей механизма поворота (в прототипе - на выходе из гидромотора) расположена на одном уровне с осью бортовых ветвей механизма передач.
Однако его компоновка на роботе типа «Гантель» - транспортном средстве, выполненном по соосной колесной схеме 2×2 (т.е. на аналогах), неизбежно приводит к существенно завышенному относительному диаметру (относительно диаметров бортовых частей МПП и колес транспортного средства) средней части (по ширине транспортного средства), а значит - небольшому дорожному просвету, что определяет недостаточно высокую профильную проходимость транспортного средства (входящую в состав важнейших технико-эксплуатационных/тактико-технических характеристик транспортного средства), особенно робота, подвижность которого в автономном режиме не может быть восстановлена человеком или иными внешними средствами.
Технический результат использования заявляемого изобретения заключается в адаптации привода с МПП к использованию в составе роботов или экипажных транспортных средств, выполненных по соосной колесной схеме 2×2 - типа «Гантель», с получением при этом компоновочных преимуществ, минимизацией диаметра средней части (по ширине транспортного средства), а значит - небольшому дорожному просвету, что повышает профильную проходимость транспортного средства и, в свою очередь - его технико-эксплуатационные/тактико-технические характеристики.
Указанный технический результат достигается, согласно изобретению тем, что в приводе транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота, содержащем первый двигатель, создающий первый поток мощности через механизм передач, с возможностью прямолинейного движения транспортного средства, и второй двигатель, создающий второй поток мощности через механизм поворота, с возможностью поворота транспортного средства, разнесенные по ширине транспортного средства суммирующие планетарные ряды, два входных звена каждого из которых соединены с первым и вторым двигателем соответственно, а выходное звено - с соосными колесами транспортного средства, а также распределительную зубчатую передачу разнонаправленного вращения бортовых ветвей механизма поворота с общим ведущим звеном, двигатели разнесены по ширине транспортного средства вплоть до перекрытия колесами, а упомянутая распределительная зубчатая передача выполнена в виде также разнесенных по ширине транспортного средства вплоть до перекрытия колесами редукторных частей, одна из которых представлена цилиндрической зубчатой передачей с передаточным отношением 1, а другая - цилиндрической зубчатой парой с передаточным отношением минус 1, при этом одно из перечисленных зубчатых колес распределительной зубчатой передачи выполнено двухвенцовым и установлено соосно с суммирующими планетарными рядами и колесами транспортного средства.
При этом для усиления эффекта сокращения диаметра средней (D) части (корпуса) транспортного средства в свете решения задачи увеличения дорожного просвета, двухвенцовое зубчатое колесо распределительной зубчатой передачи может быть установлено коаксиально поперечному валу подвода мощности от первого двигателя к суммирующим рядам.
Для еще большего усиления эффекта сокращения диаметра средней (D) части (корпуса) транспортного средства в свете решения задачи увеличения дорожного просвета, а также сохранения удовлетворительного к.п.д. привода, первый двигатель может быть установлен соосно суммирующим планетарным рядам и колесам транспортного средства.
Для максимальной адаптации привода к использованию в составе робота конфигурации (типа) «гантель» и оптимизации массогабаритных характеристик, оба двигателя могут быть выполнены электрическими.
Покажем в заявляемом техническом решении причинно-следственную связь между отличительными признаками и достигаемым техническим результатом, а также необходимость и достаточность отличительных признаков для достижения этого результата.
За счет разнесения двигателей по ширине транспортного средства вплоть до перекрытия колесами, расширяются возможности уменьшения диаметра средней части (корпуса) транспортного средства, ибо относительно большие диаметры двигателей (даже если они электрические) препятствуют этому. Соответственно, двигатели приобретают «бортовое» расположение и «вписываются» во внутренние объемы развитых колес (с образованием «мотор-колес»), а диаметр средней части транспортного средства, выполненного по одноосной колесной схеме, уменьшается, что повышает, при прочих равных условиях, дорожный просвет и, следовательно, профильную проходимость транспортного средства, его технико-эксплуатационные/тактико-технические характеристики.
За счет выполнения упомянутой распределительной зубчатой передачи в виде также разнесенных по ширине транспортного средства вплоть до перекрытия колесами редукторных частей, технический результат по увеличению относительного размера дорожного просвета усиливается, так как в область колес транспортного средства выносятся именно те элементы механизма поворота (зубчатые колеса), которые доминируют в формировании размеров привода по высоте, а значит - и дорожного просвета. Причем их выполнение с передаточными отношениями 1 и минус 1 соответственно позволяет сохранить требование разнонаправленности вращения левой и правой частей механизма поворота.
Выполнением одного из перечисленных зубчатых колес распределительной зубчатой передачи двухвенцовым плюс установкой такового соосно с суммирующими планетарными рядами и колесами транспортного средства обеспечивается минимальность «кинематического» диаметра D.
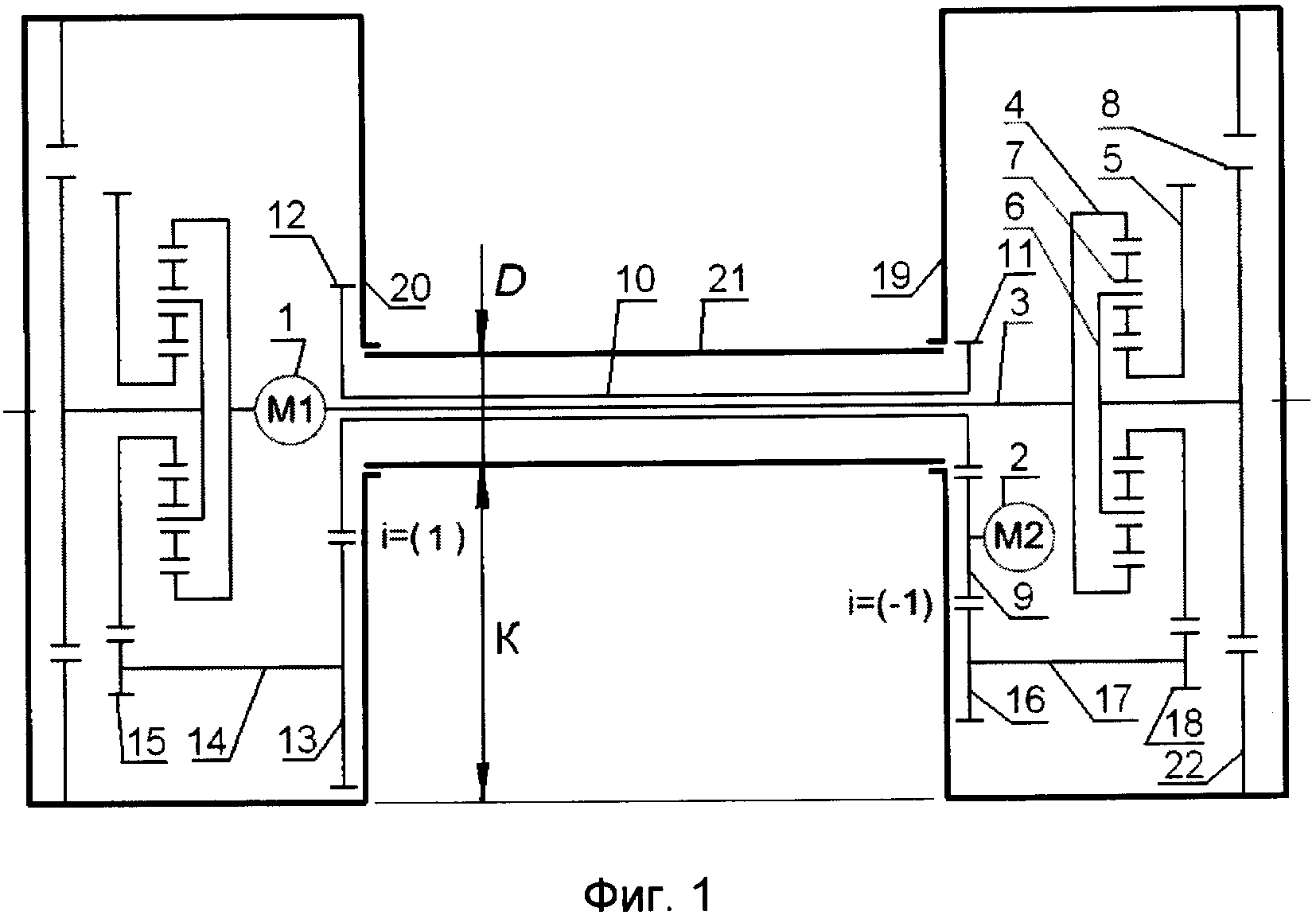
На фиг. 1 показана кинематическая схема заявляемого привода, вид сзади, как пример выполнения заявляемого устройства, где введены следующие обозначения:
D - диаметр средней части (корпуса) транспортного средства;
K - дорожный просвет (клиренс) транспортного средства;
I - передаточное отношение зубчатых пар;
1 (М1) - первый электродвигатель; 2 (М2) - второй электродвигатель; 3 - главный вал механизма передач (соединен с валом двигателя 1); 4 - эпицикл, то есть большое центральное колесо (одно входное звено) правого суммирующего планетарного ряда; 5 - солнце, то есть малое центральное колесо (другое входное звено правого суммирующего планетарного ряда); 6 - водило (выходное звено правого суммирующего планетарного ряда; 7 - сателлит(ы) правого суммирующего планетарного ряда (к основным звеньям не относятся); 8 - правое выходное звено (зубчатое колесо) МПП, находящееся в зацеплении зубчатым венцом колеса транспортного средства; 9 - ведущее цилиндрическое зубчатое колесо на валу двигателя М2, входящее в состав механизма поворота (через который идет второй поток мощности); 10 - двухвенцовое цилиндрическое зубчатое колесо (передаточное звено), входящее в состав центрально-левой цилиндрической зубчатой передачи механизма поворота; 11 - правый зубчатый венец колеса 10; 12 - левый зубчатый венец колеса 10; 13 - ведомое цилиндрическое колесо левой части распределительной зубчатой передачи разнонаправленного вращения бортовых ветвей механизма поворота; 14 - вал левой ветви распределительной зубчатой передачи; 15 - зубчатое колесо, соединяющее вал 14 с солнцем левого суммирующего планетарного ряда; 16 - ведомое цилиндрическое колесо правой части распределительной зубчатой передачи разнонаправленного вращения бортовых ветвей механизма поворота; 17 - вал правой ветви распределительной зубчатой передачи; 18 - зубчатое колесо, соединяющее вал 17 с солнцем 5; 19 - правое колесо транспортного средства; 20 - левое колесо транспортного средства; 21 - центральная часть (корпус) транспортного средства; 22 - зубчатый венец правого колеса транспортного средства (в зубчатом зацеплении с правым выходным звеном 8).
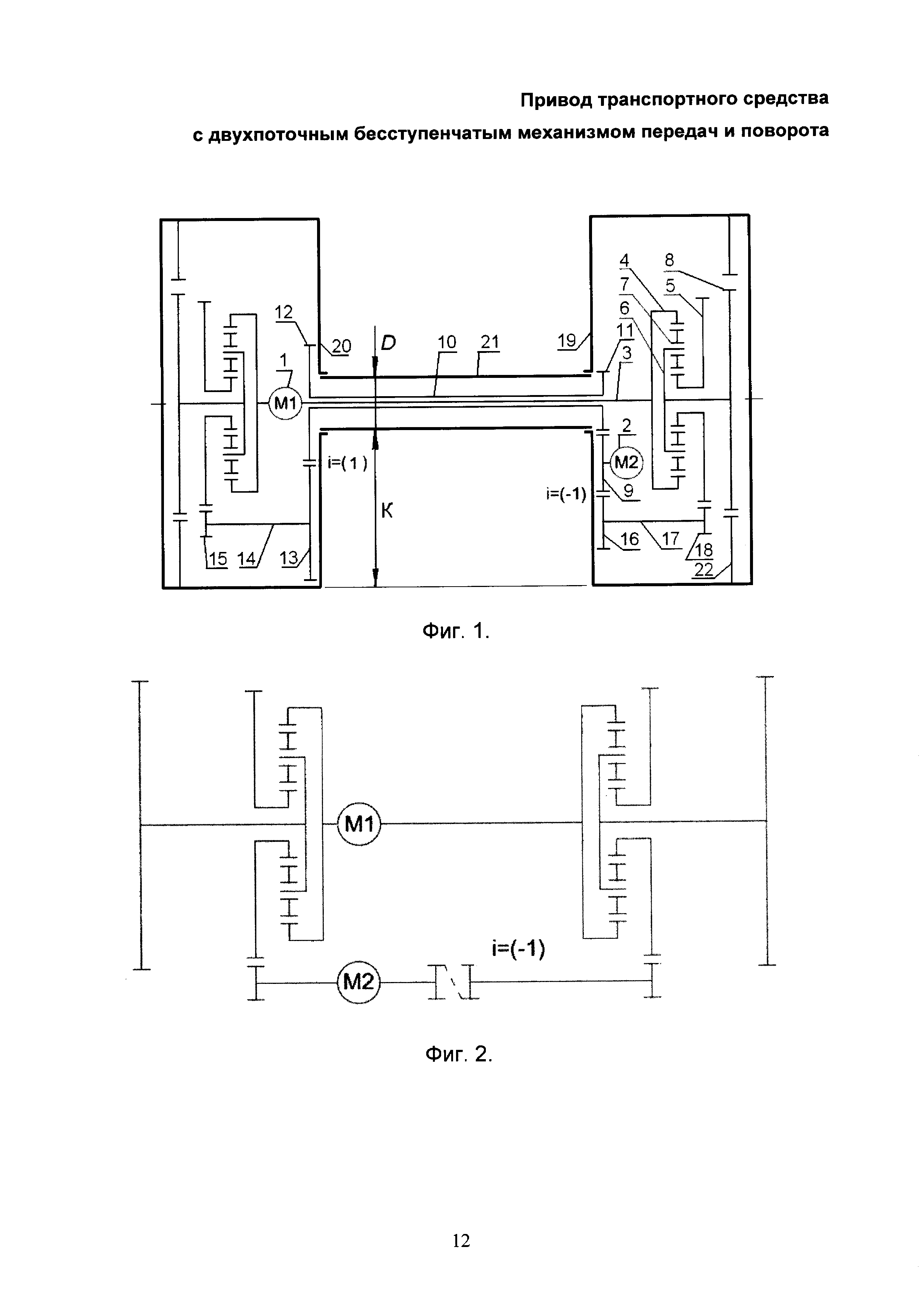
На фиг. 2 показана кинематическая схема ближайшего аналога (прототипа).
Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота (МПП) содержит первый двигатель 1 (М1), создающий первый поток мощности через механизм передач (одна часть МПП), с возможностью прямолинейного движения транспортного средства, и второй двигатель 2 (М2), создающий второй поток мощности через механизм поворота (другая часть МПП), с возможностью поворота транспортного средства.
Далее, имеются разнесенные по ширине транспортного средства (иначе говоря - по бортам) суммирующие планетарные ряды, два входных звена каждого из которых соединены с первым 1 и вторым 2 двигателем соответственно, а выходное звено - с соосными колесами 19 (правое) и 20 (левое) транспортного средства.
На примере правого «борта» это выглядит конкретно так: вал 3 соединен с эпициклом 4 и через сателлиты 7 - с водилом 6 (с учетом солнца 5) и далее - с выходным звеном (зубчатым колесом внешнего зацепления) 8, а последнее, в свою очередь, связано с зубчатым венцом (внутреннего зацепления) 22 на внутренней поверхности колеса 19.
Часть привода, размещаемая на левом борту - в левом колесе 20, идентична правой части привода (соответственно, номера позиций на фиг. 1 не поставлены).
Привод содержит также распределительную зубчатую передачу 9-18 разнонаправленного вращения бортовых ветвей механизма (правой 9-18 и левой 11-15) поворота, с общим для ветвей ведущим звеном 9.
Следующая группа конструктивных признаков определяет отличие заявляемого привода от известного ближайшего аналога (прототипа).
Двигатели 1 (М1) и 2 (М2) разнесены по ширине транспортного средства вплоть до перекрытия колесами 20 и 19 соответственно.
Распределительная зубчатая передача 9-18 выполнена в виде также разнесенных по ширине транспортного средства, вплоть до перекрытия колесами 19 и 20, редукторных частей, одна из которых (правая) представлена цилиндрической зубчатой парой 9-16 с передаточным отношением (i) минус 1, а другая - цилиндрической зубчатой передачей (10, 11, 12) - 13 с передаточным отношением (i) минус 1, при этом одно из перечисленных зубчатых колес распределительной зубчатой передачи, а именно - 10 выполнено двухвенцовым (правый 11 и левый 12 венцы) и установлено соосно с суммирующими планетарными рядами и колесами транспортного средства.
Дальнейшее описание устройства относится только к частным рекомендуемым случаям реализации, характеризуемыми дополнительными конструктивными признаками заявляемого устройства (см. фиг. 1).
Двухвенцовое зубчатое колесо 10 распределительной зубчатой передачи 9-18 может быть установлено коаксиально поперечному валу 3 подвода мощности от двигателя 2 (М2) к суммирующим рядам (на примере правого ряда 4-7).
Двигатель 1 (М1) может быть установлен соосно суммирующим планетарным рядам (на примере правого ряда 4-7) и колесам 19, 20 транспортного средства.
Двигатели 1 (М1) и 2 (М2) могут быть выполнены электрическими (в том числе со встроенными редукторами).
Зубчатые колеса планетарных рядов можно выполнить цилиндрическими, прямозубыми, зацепление эвольвентное. Элементы управления не предусмотрены - достаточно режима торможения двигателем М1.
Возможны другие варианты использования планетарных рядов, например подвод основной ветви к солнцу, параллельной - к эпициклу, съем - с водила.
К корпусу 21 может быть прикреплена опора («хвост») с опорным роликом или опорой скольжения - для равновесия и восприятия реактивного момента в приводе (на фиг. 1 не показана(н)).
Заявляемое устройство работает следующим образом.
Привод (трансмиссия) является двухпоточной в повороте. Механизм передач с двигателем 1 (М1) функционально является в таком приводе «основным» и работает как в прямолинейном движении, так и при повороте.
При прямолинейном движении транспортного средства двигатель 2 (М2), а значит, и весь механизм поворота остановлен. Мощность от двигателя 1 (М1) передается через механизм передач по звеньям 3, 4, 6, 7, 8 колесу 19 и аналогичным образом одновременно колесу 20 по звеньям левого ряда до зубчатого венца, не обозначенным номерами позиций. В результате скорости вращения колес 19 и 20 одинаковы, что и определяет прямолинейность (разумеется, при одинаковых внешних условиях).
При этом привод колеса 19 (полусферы, цилиндра, конуса и т.д.) осуществляется от зубчатого колеса (правого выходного звена передачи) 6, находящегося в зубчатом зацеплении с венцом 22.
«Параллельный» поток мощности имеет началом двигатель 2 (М2). При прямолинейном движении этот двигатель выключен. При повороте его включают. Вращаясь по или против часовой стрелки в зависимости от направления поворота, его вал «подкручивает» одно из колес 19, 20 - один «борт» (забегающий - внешний по отношению к центру поворота), и «замедляет» другое колесо - другой «борт» (отстающий - внутренний относительно центра поворота). Это происходит вследствие того, что вращение (и поток мощности) от вала двигателя 2 (М2) передается через общее ведущее зубчатое колесо 9, с одной стороны, ведомому двухвенцовому (венцы 16 и 18) зубчатому колесу 17, то есть правой ветви (редукторной части) распределительной зубчатой пары с передаточным отношением I=-1 (и далее на солнце 5 правого планетарного ряда), а с другой стороны - левой ветви - ведомому двухвенцовому (венцы 11 и 12) зубчатому колесу (звену) 10 (редукторной части) распределительной зубчатой пары с передаточным отношением I=1, включающей в себя и двухвенцовое (венцы 13 и 15) зубчатое колесо 14 (и далее на солнце левого планетарного ряда).
Очевидно, планетарные ряды здесь применены для суммирования потоков мощности от двигателя 1 (М1) и двигателя 2 (М2).
Бесступенчатое изменение частоты вращения (режима работы) двигателя 2 (М2) вызывает соответствующее дифференциальное воздействие на солнца правого и левого планетарных рядов, а значит, и дифференциальное воздействие на выходные звенья (в том числе звено 8 и его аналог слева) привода (трансмиссии): колеса 19 и 20 вращаются с разными скоростями сообразно с режимом работы обоих двигателей - 1 (М1) и 2 (М2).
Кинематика описывается уравнением Виллиса. Силовые соотношения следуют из уравнения моментов основных звеньев.
Управляемость транспортного средства ожидается близкой к идеальной с возможностью поворачивать почти вокруг центра тяжести (развернуться на точке помешает третья точка опоры - «хвост»).
Ниже приведены примеры выполнения основных элементов (покупных изделий) заявляемого привода.
В его составе в качестве двигателей М1 и М2 могут быть использованы сборки Maxon (см. Каталог фирмы Maxon 2011-2012 гг., с. 134, 227, 262), в которые входят, например: двигатель RE-max 29 (226802); редуктор GP26B (144026 или 144037); Энкодер MR (225773). Предполагается выбор двигателей М1 и М2 с разной мощностью.
Автономный источник энергии (который при реализации транспортного средства неизбежно потребуется) может быть выполнен на базе аккумулятора DJW12-2.3 (12V2.3AH) LEOCH BATTERY CO,LTD.
Устройство для регулирования микроклимата
Физиотерапевтический бюстгальтер расширенного функционального назначения
Винтокрыл
Всенаправленная антенна излучения
Бронированный наземный транспортный комплекс
Способ управления поворотом наземного транспортного средства и самоходный минный разградитель
Способ разминирования минных полей и устройство для его осуществления
Бронированный объект с динамической защитой и электрооборудованием
Устройство для определения параметров движения цели
Способ определения координат цели в трехпозиционной дальномерной радиолоокационной системе

