Результат интеллектуальной деятельности: Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Вид РИД
Изобретение
Изобретение относится к информационно-вычислительным системам и устройствам, обеспечивающим решение задач дистанционного управления движением подвижных объектов, оснащенных боевым функциональным модулем, по заданному алгоритму в автоматическом и ручном режимах.
Известна информационно-управляющая система робототехнического комплекса боевого применения (см. патент RU №2523874 С1, F41А 23/34, G01С 23/00, В60Р 3/00, 27.07.2014 г.), принятая за прототип. Информационно - управляющая система робототехнического комплекса боевого применения содержит магистрали информационного обмена, обзорно-прицельные средства, системы опознавания образов, датчики, принцип действия которых основан на различных физических принципах, индикационно-управляющие устройства, вычислительную систему. Информационно-управляющие потоки робототехнического комплекса разделены на распределенные каналы обмена и управления первого уровня: канал обмена и управления по системе связи и передачи данных информационно-вычислительной системы роботизированной транспортной платформы с пунктом дистанционного управления. Каналы обмена второго уровня содержат: канал обмена с видеокамерами системы технического зрения, канал обмена с ультразвуковыми датчиками, канал обмена с датчиками и исполнительными механизмами системы управления движением, канал обмена с системой топопривязки и навигации: аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве, канал обмена и управления по системе связи и передачи данных вычислительного ядра блока управления, размещенного на пункте дистанционного управления, с вычислительным ядром поворотной платформы, размещенной на роботизированной транспортной платформе и оснащенной системой вооружения (целевой нагрузкой), с устройством отображения информации и органами управления, канал обмена вычислительного ядра поворотной платформы с гироскопом, с исполнительными двигателями вертикального и горизонтального перемещения, с электроспуском системы вооружения, с блоком наблюдения и целеуказания: лазерным дальномером, тепловизором, видеокамерой широкого поля зрения, видеокамерой узкого поля зрения.
Недостатками прототипа являются:
- отсутствие возможности адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды;
- недостаточное количество базовых технологий работы с комплексом, которые могут быть отработаны операторами в ходе учебно-тренировочного процесса и применены в боевых условиях;
- отсутствие возможности внедрения гибких алгоритмов управления, низкая универсальность применения;
- недостаточная помехозащищенность каналов связи;
- низкий уровень контроля «поведения» управляемого объекта.
Предлагаемым изобретением решается задача по повышению эффективности, эксплуатационных характеристик и функциональных возможностей применения боевого роботизированного комплекса.
Технический результат, получаемый при осуществлении изобретения, заключается в создании системы управления многофункционального робототехнического комплекса обеспечения боевых действий, реализующей работу робототехнического комплекса в нескольких режимах, дистанционное и полуавтономное управление следующими вариантами исполнения робототехнического комплекса: боевым, разведывательным и транспортным, связь и обмен информацией по радио и проводным каналам, работу с цифровыми картами местности, контроль функционирования комплекса, сохранность информации и программного обеспечения при сбоях и защиту информации от несанкционированного доступа.
Указанный технический результат достигается тем, что в предлагаемой системе управления многофункционального робототехнического комплекса обеспечения боевых действий, содержащей бортовую информационно-вычислительную систему, систему связи и передачи данных и команд управления, аппаратуру технического зрения, систему топопривязки и ориентации с аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве, аппаратуру управления целевой нагрузкой, выносной пункт управления робототехническим комплексом, программный комплекс, новым является то, что система управления выполнена с возможностью управления целевой нагрузкой в следующих вариантах исполнения робототехнического комплекса: управление разведывательным роботом, управление боевым роботом и управление транспортным роботом, переход с управления одного варианта исполнения на другой осуществляется перенастройкой программного комплекса и сменой целевой нагрузки, система управления выполнена с возможностью обеспечения следующих режимов работы: боевого, дежурного и учебно-тренировочного, бортовая информационно-вычислительная система выполнена с возможностью наращивания производительности и функциональности, ввода новых и коррекции старых алгоритмов управления, защиты от взлома и внешнего перехвата управления, система связи и передачи данных и команд управления выполнена с возможностью передачи с разведывательного робототехнического комплекса на выносной пункт управления до трех видеопотоков и данных о его положении и состоянии, обеспечения дальности обмена информацией до 2 км в условиях прямой радиовидимости и частичного перекрытия радиовидимости, канальной скорости передачи информации до 8 Мбит/с и ее адаптивное изменение в зависимости от помеховой обстановки, аппаратура технического зрения выполнена с возможностью формирования данных для управления движением робототехнического комплекса в ночных и дневных условиях, сжатия видеоинформации с изменяемым и управляемым коэффициентом сжатия, обеспечения наблюдения местности по дальности до 100 м, по горизонтальному углу 120° по курсу и 120° сзади с захватом бортов, по вертикальному углу от минус 30° до ±30°, система топопривязки и ориентации с аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве выполнена с возможностью определения начального дирекционного угла продольной оси робототехнического комплекса с предельной ошибкой ±4 д.у. за время определения не более 8 мин, определения исходных координат робототехнического комплекса со среднеквадратической ошибкой 15 м за время определения не более 5 мин, определения текущего дирекционного угла со среднеквадратической ошибкой 4 д.у., определения текущих координат со среднеквадратической ошибкой 15 м, в дифференциальном режиме - 10 м, определения углов продольного и поперечного наклонов платформы комплекса со среднеквадратической ошибкой 2 д.у., работы с цифровой картой местности: получение и отображение боевой задачи с нанесением на карте положения целевого пункта с помощью специальных тактических знаков, расчет возможных траекторий движения комплекса от пункта управления до целевого пункта, нанесение на карту текущего местоположения, определение наличия и характера изменений в районе наблюдения, аппаратура управления целевой нагрузкой - системой разведки включает в себя тепло-телевизионный дальномерный модуль, платформу наведения и стабилизации, подъемную мачту, систему управления, программный комплекс, тепло-телевизионный дальномерный модуль выполнен с возможностью обеспечения днем обнаружения и распознавания цели типа «танк» на дальности 5000 м и 4000 м соответственно, обеспечения ночью обнаружения и распознавания цели типа «танк» на дальности 2500 м и 2000 м соответственно, обеспечения днем и ночью обнаружения цели типа «ростовая фигура» на дальности 2000 м, платформа наведения и стабилизации выполнена с возможностью ведения разведки в секторе: по азимуту ±185°, по углу места от минус 15° до 60° со скоростью наведения (0,02-10) град/с, подъемная мачта выполнена с возможностью размещения на ней платформы наведения и стабилизации и перемещения в рабочее и походное положении, высота поднятия платформы наведения и стабилизации в рабочем положении составляет не менее 1,5 м от уровня крыши базового шасси, система управления аппаратурой управления целевой нагрузкой - системой разведки выполнена с возможностью передачи в систему управления робототехнического комплекса видеоинформации телевизионного и тепловизионного каналов, значений измеренных координат цели, ориентиров и местных предметов, система управления аппаратурой управления целевой нагрузкой - боевым модулем выполнена с возможностью передачи в систему управления робототехнического комплекса, кроме видеоинформации, результатов стрельбы и информации о состоянии боевого модуля, выносной пункт управления робототехническим комплексом включает в себя носимые автоматизированные рабочие места оператора-водителя, оператора-разведчика, оператора-стрелка и командира и выполнен с возможностью формирования команд управления параметрами системы разведки, подъемной мачтой, наведением оптико-электронных средств разведки, измерениями координат целей и объектов, боевым модулем.
Выполнение системы управления с возможностью управления целевой нагрузкой в различных вариантах исполнения робототехнического комплекса позволяет:
- вести войсковую и артиллерийскую разведки, огневую поддержку войсковых подразделений, охрану и оборону военных объектов, мест дислокации, сопровождать обнаруженные цели;
- осуществлять дистанционное управление средством огневого поражения на подвижном объекте и осуществлять поражение их в автоматизированном и полуавтоматизированном режимах;
- осуществлять доставку полезного груза до пункта назначения (из зон заражения или местности, представляющей потенциальную угрозу для человека и т.д.).
Осуществление перехода с управления одного варианта исполнения на другой перенастройкой программного комплекса и сменой целевой нагрузки позволяет:
- исключить изменения в аппаратном составе и настройку аппаратуры при переходе на другой вариант исполнения робототехнического комплекса;
- упростить процесс изготовления и сборки комплекса. Выполнение системы управления с возможностью обеспечения
следующих режимов работы: боевого, дежурного и учебно-тренировочного позволяет реализовать функциональные возможности комплекса в полном объеме, функционирование при ограниченном составе аппаратуры, функционирование в режиме совершенствования навыков практической работы командира и операторов.
Выполнение бортовой информационно-вычислительной системы с возможностью наращивания производительности и функциональности, ввода новых и коррекции старых алгоритмов управления, защиты от взлома и внешнего перехвата управления позволяет:
- облегчить процесс модернизации робототехнического комплекса, поддерживать его достаточный технический уровень;
- повысить гибкость «поведенческой» модели комплекса;
- повысить сохранность информации и программного обеспечения.
Выполнение системы связи и передачи данных и команд управления с возможностью передачи с разведывательного робототехнического комплекса на выносной пункт управления до трех видеопотоков и данных о его положении и состоянии, обеспечения дальности обмена информацией до 2 км в условиях прямой радиовидимости и частичного перекрытия радиовидимости, канальной скорости передачи информации до 8 Мбит/с и ее адаптивное изменение в зависимости от помеховой обстановки позволяет:
- обеспечивать управление самодвижущейся платформой комплекса;
- обеспечивать управление боевым/разведывательным/транспортным модулем;
- обеспечить функционирование комплекса в условиях неудовлетворительной помеховой обстановки;
- обеспечить необходимые скоростные параметры передачи информации.
Выполнение аппаратуры технического зрения с возможностью формирования данных для управления движением робототехнического комплекса в ночных и дневных условиях, сжатия видеоинформации с изменяемым и управляемым коэффициентом сжатия, обеспечения наблюдения местности по дальности до 100 м, по горизонтальному углу 120° по курсу и 120° сзади с захватом бортов, по вертикальному углу от минус 30° до ±30° позволяет:
- обеспечить максимальные временные рамки применения робототехнического комплекса;
- обеспечить наблюдение за местностью в передней и задней полусфере комплекса для реализации задач управления движением;
- обеспечить распознавание состояния дороги и препятствий;
- обеспечить дистанционное управление переключением видеокамер.
Выполнение системы топопривязки и ориентации с аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве позволяет:
- выполнять начальную привязку (прямоугольные координаты и высота) робототехнического комплекса;
- определять текущие координаты, дирекционный угол продольной оси самодвижущейся платформы комплекса;
- определять углы продольного и поперечного крена. Выполнение системы топопривязки и ориентации с возможностью работы с цифровой картой местности позволяет:
- реализовать отображение маршрута движения комплекса на цифровой карте местности в реальном масштабе времени;
- обеспечить получение и отображение боевой задачи с нанесением на карте положения целевого пункта с помощью специальных тактических знаков;
- обеспечить расчет возможных траекторий движения комплекса от пункта управления до целевого пункта;
- определять наличие и характер изменений в районе наблюдения.
Включение в состав аппаратуры управления целевой нагрузкой - системой разведки тепло-телевизионного дальномерного модуля, платформы наведения и стабилизации, подъемной мачты, системы управления, программного комплекса позволяет:
- вести разведку противника и местности;
- реализовать определение координат целей, ориентиров и местных предметов;
- выполнять наведение электронно-оптических средств разведки в горизонтальной и вертикальной плоскостях;
- выполнять автоматическое сопровождение целей;
- выполнять предварительную обработку видеоинформации;
- включать в объем программного обеспечения технологические системы, системы контроля и управления, обеспечивающие надежность функционирования комплекса и предотвращающие ошибочные действия операторов;
- обеспечивать возможность корректировки характеристик, предусмотренных для информирования оператора о превышении контролируемых параметров.
Выполнение тепло-телевизионного дальномерного модуля с возможностью обеспечения днем обнаружения и распознавания цели типа «танк» на дальности 5000 м и 4000 м соответственно, обеспечения ночью обнаружения и распознавания цели типа «танк» на дальности 2500 м и 2000 м соответственно, обеспечения днем и ночью обнаружения цели типа «ростовая фигура» на дальности 2000 м позволяет:
- эффективно выполнять боевые и разведывательные задачи в любое время суток;
- обнаруживать и распознавать различные типы целей;
- повысить боевую эффективность робототехнического комплекса.
Выполнение платформы наведения и стабилизации с возможностью ведения разведки в секторе: по азимуту ±185°, по углу места от минус 15° до 60° со скоростью наведения (0,02-10) град/с позволяет:
- обеспечить необходимые сектора наблюдения и целеуказания;
- обеспечить необходимую скорость наведения в горизонтальной и вертикальной плоскости.
Выполнение подъемной мачты с возможностью размещения на ней платформы наведения и стабилизации позволяет:
- обеспечить на стоянке ведение разведки и наблюдения при поднятой подъемной мачте и подъемной мачте, уложенной по-походному;
- обеспечить в движении ведение наблюдения при подъемной мачте, уложенной по походному;
- обеспечить высоту подъема платформы наведения и стабилизации с тепло-телевизионным дальномерным модулем от уровня крыши базового шасси до 1,5 м.
Выполнение системы управления аппаратурой управления целевой нагрузкой - системой разведки с возможностью передачи в систему управления робототехнического комплекса видеоинформации телевизионного и тепловизионного каналов, значений измеренных координат цели, ориентиров и местных предметов, позволяет:
- организовать обзорно-поисковую/поисково-разведывательную (формирование видеоизображения текущей фоно-целевой обстановки для оперативного наблюдения за окружающей обстановкой и местностью, поиска, обнаружения целей (целевых объектов) систему;
- организовать дневной/ночной канал на основе телевизионных оптико-электронных средств;
- организовать ночной канал на базе тепловизионных средств.
Выполнение системы управления аппаратурой управления целевой нагрузкой - боевым модулем с возможностью передачи в систему управления робототехнического комплекса, кроме видеоинформации, результатов стрельбы и информации о состоянии боевого модуля позволяет:
- отслеживать расход и наличие боеприпасов в боевом модуле;
- постоянно отслеживать результаты контроля и диагностики боевого модуля.
Включение в состав выносного пункта управления робототехническим комплексом носимых автоматизированных рабочих мест оператора-водителя, оператора-разведчика, оператора-стрелка и командира позволяет:
- обеспечить надежность и удобство управления робототехническим комплексом в любом варианте исполнения;
- обеспечить сбор, обработку и анализ получаемой информации от самодвижущейся платформы с установленным на ней модулем;
- обеспечить скрытность, возможность быстрого развертывания и свертывания пункта управления;
- обеспечить работу днем и ночью в любых климатических условиях;
- обеспечить обмен информации выносного пункта управления с информационной системой вышестоящего подразделения ЕСУ ТЗ.
Выполнение выносного пункта управления с возможностью формирования команд управления параметрами системы разведки и боевого модуля, подъемной мачтой, наведением оптико-электронных средств разведки, измерениями координат целей и объектов позволяет:
- обеспечить одновременное управление несколькими робототехническими комплексами с установленными на них боевыми, разведывательными или транспортными модулями;
- обеспечить решение информационных и расчетных задач;
- обеспечить прием, обработку и отображение видеоинформации от системы технического зрения в реальном масштабе времени (прямая трансляция);
- отображать телеметрическую информацию о состоянии комплекса и его модуля (готовность, скорость движения, направление движения, углы наклона, текущие координаты, параметры работы двигателя и др.);
- отображать на цифровой карте местности информацию о месте расположения и маршруте движения.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
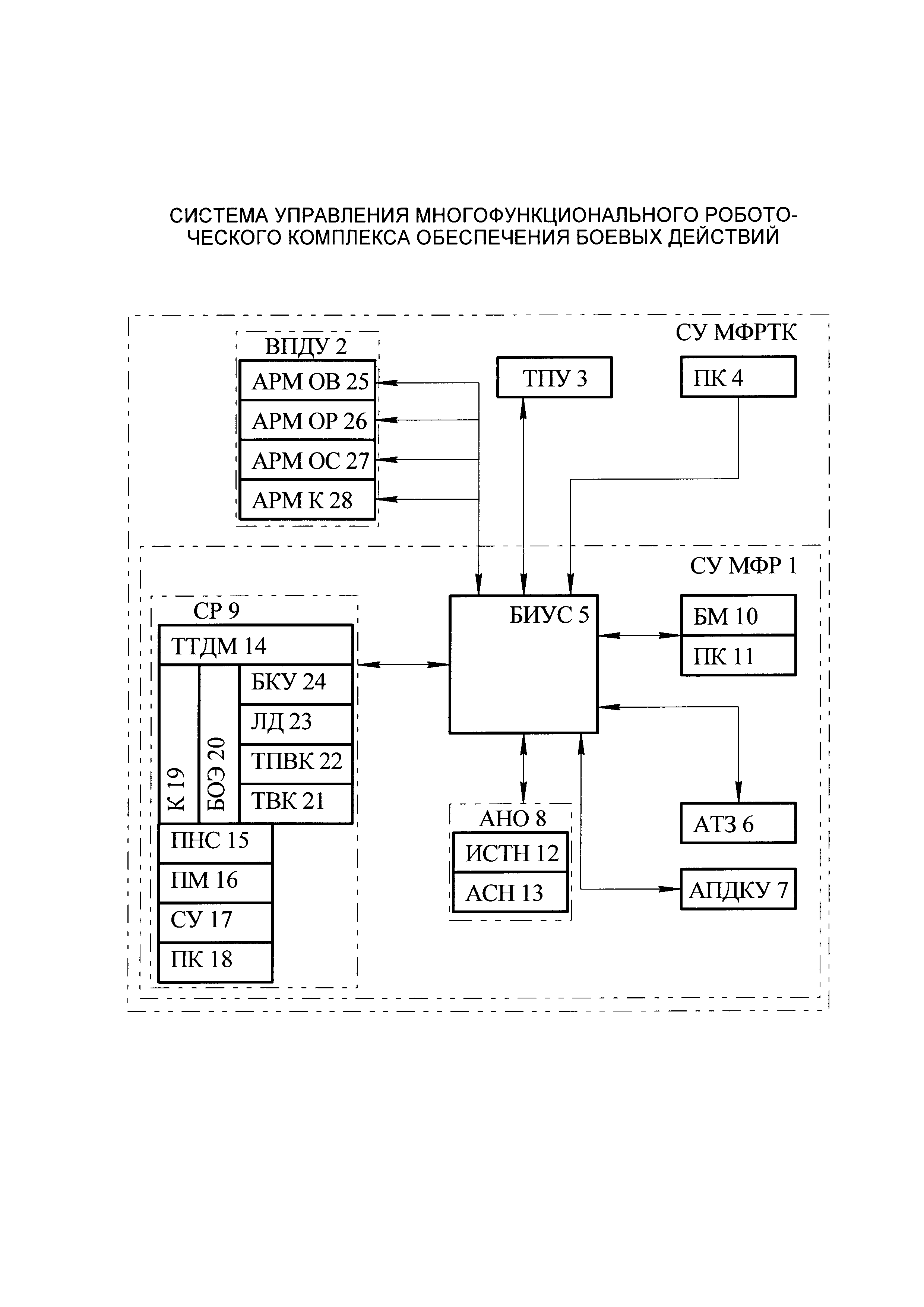
Сущность изобретения поясняется чертежом, где показана структурная схема системы управления многофункционального робототехнического комплекса.
Система управления многофункционального робототехнического комплекса (СУ МФРТК) обеспечения боевых действий содержит систему управления многофункционального робота (СУ МФР) 1, выносной пункт дистанционного управления (ВПДУ) 2, технологический пульт управления (ТПУ) 3, программный комплекс (ПК) 4. В состав СУ МРФ 1 входит бортовая информационно-управляющая система (БИУС) 5, аппаратура технического зрения (АТЗ) 6, аппаратура передачи данных и команд управления (АПДКУ) 7, аппаратура навигации и ориентации (АНО) 8, целевая нагрузка - система разведки (CP) 9 или боевой модуль (БМ) 10, программный комплекс (ПК) 11. АНО 8 содержит инерциальную систему топопривязки и навигации (ИСТН) 12, аппаратуру спутниковой навигации (АСН) 13. В состав CP 9 входит тепло-телевизионный дальномерный модуль (ТТДМ) 14, платформа наведения и стабилизации (ПНС) 15, подъемная мачта (ПМ) 16, система управления (СУ) 17, программный комплекс (ПК) 18. ТТДМ 14 содержит корпус (К) 19, блок оптико-электронный (БОЭ) 20 в составе: телевизионный канал (ТВК) 21, тепловизионный канал (ТПВК) 22, лазерный дальномер (ЛД) 23, блок коммутации и управления (БКУ) 24. ВПДУ 2 содержит носимые автоматизированные рабочие места оператора-водителя (АРМ ОВ 25), оператора-разведчика (АРМ ОР) 26, оператора-стрелка (АРМ ОС) 27 и командира (АРМ К) 28.
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Система управления многофункционального робототехнического комплекса обеспечения боевых действий функционирует следующим образом. СУ МФРТК обеспечивает:
- выполнение боевых задач в любое время суток, на равнинной местности и в горных условиях (до 3000 м над уровнем моря), в северном и южном полушариях;
- управление разведывательным/боевым/транспортным роботом (вариант исполнения робота);
- связь и обмен информацией (передача данных и речевая связь) по радио и проводным каналам связи с взаимодействующими объектами;
- получение и отображение боевой задачи от вышестоящего начальника, нанесение положения целевого пункта на цифровую карту местности с использованием специальных тактических знаков;
- расчет возможных траекторий движения разведывательного робота от пункта управления до целевого пункта с использованием цифровой карты местности с учетом имеющихся данных о дислокации противника, проходимости, метеоусловий и т.д.;
- нанесение текущего положения комплекса на цифровую карту местности с использованием специальных тактических знаков;
- дистанционное и полуавтономное управление многофункциональным роботом;
- определение наличия и характера изменений в районе наблюдения;
- нанесение полученной и обобщенной информации о противнике на цифровую карту местности с использованием специальных тактических знаков;
- передачу результатов работы МФРТК вышестоящему командиру;
- решение задач по подготовке и управлению боевой работой МФРТК;
- контроль функционирования МФРТК;
- сохранность информации и программного обеспечения при сбоях в работе технических средств и в аварийных ситуациях;
- защиту информации от несанкционированного доступа.
Переход с управления разведывательным роботом на управление боевым роботом и обратно осуществляется перенастройкой системы управления и сменой целевой нагрузки.
СУ МФРТК обеспечивает боевой, дежурный и учебно-тренировочный (режим тренажа) режимы работы. В боевом режиме функциональные задачи выполняются в полном объеме. В дежурном режиме функционирует минимальное количество технических средств, обеспечивающих выполнение в автоматизированном режиме следующих функций:
- решение комплексов расчетных и информационных задач (обработка данных о своих войсках, обработка данных о войсках противника, планирование маршей и т.д.);
- речевая связь и обмен информацией по телекодовым каналам связи с взаимодействующими объектами.
Учебно-тренировочный режим обеспечивает совершенствование навыков практической работы командира и операторов комплекса. Всем документам, циркулирующим в комплексе, в этом режиме автоматически присваивается признак - «учебный».
Обмен информацией командира МФРТК с взаимодействующими объектами происходит в автоматизированном или неавтоматизированном режиме в зависимости от наличия у этих объектов средств автоматизации. Взаимодействие МФРТК с объектами оформляется протоколами информационно-технического сопряжения.
Дальность управления МФР с ВПДУ 2 обеспечивается на расстоянии не менее 2 км. Время перевода МФР из дежурного режима в боевой с первоначальным ориентированием по АНО 8 составляет не более 8 мин, без ориентирования - не более 0,5 мин.
Система управления многофункциональным роботом
Функциональное назначение СУ МФР 1 определяется типом целевой нагрузки. При этом обеспечивается настройка СУ МФР 1 под целевую нагрузку. СУ МФР 1 обеспечивается:
- управление целевой нагрузкой;
- управление функционированием МФР;
- управление движением в дистанционном и полуавтономном режимах управления;
- формирование и передачу по каналу связи на ВПДУ 2 видеоинформации, информации о результатах измерения координат объектов, о положении и состоянии МФР, результаты диагностики и контроля аппаратуры;
- прием от ВПДУ 2 данных и команд управления;
- определение координат и высоты местоположения, дирекционных углов продольной оси МФР и ориентирных направлений;
- навигацию и ориентирование при перемещениях;
- контроль и диагностику аппаратурного состава.
При потере связи с ВПДУ 2 СУ МФР 1 переходит на автономный (программный) режим управления и осуществляет движение по заданному алгоритму до восстановления связи с ВПДУ 2.
Бортовая информационно-управляющая система
БИУС 5 обеспечивает:
- прием от аппаратуры МФР информации, формирование и передачу на ВПДУ 2 сообщений с видео- и телеметрической информацией;
- прием с ВПДУ 2 и обработку сообщений с данными и командами управления, передачу их на аппаратуру МФР;
- управление функционированием МФР;
- возможность наращивания производительности и функциональности, а также ввод новых и коррекцию старых алгоритмов управления;
- защиту от взлома и внешнего перехвата управления;
- запуск и отключение управления МФР только с ВПДУ 2.
Аппаратура технического зрения
АТЗ 6 обеспечивает:
- формирование данных для управления движением робота в дневных и ночных условиях;
- сжатие видеоинформации с изменяемым и управляемым коэффициентом сжатия.
Телевизионные камеры обеспечивают наблюдение местности в дневных и условиях низкой освещенности:
- по дальности - до 100 м;
- по горизонтальному углу - 120° по курсу и 120° сзади с захватом бортов;
- по вертикальному углу - от минус 30° до ±30°.
По команде ВПДУ 2 обеспечивается дистанционное переключение и настройка телевизионных камер.
Аппаратура передачи данных и команд управления
АПДКУ 7 обеспечивает:
- передачу с разведывательного робота на ВПДУ 2 до трех видеопотоков и данных о положении и состоянии МФР;
- прием с ВПДУ 2 данных и команд управления;
- дальность обмена информацией «ВПДУ-МФР» - до 2 км в условиях прямой радиовидимости и частичного перекрытия радиовидимости;
- канальную скорость передачи информации - до 8 Мбит/с;
- адаптивное изменение канальной скорости передачи информации в зависимости от помеховой обстановки;
- работоспособность канала связи в условиях многолучевости и переотражения сигналов;
- помехозащищенность, имитостойкость и закрытость канала передачи данных.
Аппаратура навигации и ориентирования
АНО 8 обеспечивает:
- определение начального дирекционного угла продольной оси МФР с предельной ошибкой не более ±4 д.у. за время не более 8 мин;
- определение исходных координат МФР со среднеквадратической ошибкой 15 м за время не более 5 мин;
- определение текущего дирекционного угла продольной оси МФР со среднеквадратической ошибкой не более ±4 д.у.;
- определение текущих координат МФР со среднеквадратической ошибкой не более 15 м, дифференциальном режиме - 10 м;
- определение углов продольного и поперечного наклонов МФР со среднеквадратической ошибкой не более ±2 д.у.
- система работает в следующих режимах:
- режим определения координат только по данным от АСН;
- режим определения координат в одометрическом режиме;
- режим определения координат в комплексированном режиме.
1. Режим определения координат в комплексированном режиме.
Основной режим навигации. Используется по умолчанию. В данном режиме алгоритм навигации использует данные ИСТН 12 и информации от АСН 13. Учитывая разную природу ошибок навигации ИСТН 12 (систематическая составляющая) и АСН 13 (случайная составляющая), алгоритм комплексированной навигации производит уточнение поправочных угловых коэффициентов ИСТН 12 по статистическим данным от АСН 13. Таким образом, суммарная ошибка навигации, за счет долговременной стабильности ИСТН 12 и абсолютных координат от АСН 13 становится меньше ошибок ИСТН 12 и АСН 13 по отдельности.
δи>δк<δасн
где δи - среднеквадратическая ошибка инерциальной навигации;
δасн - среднеквадратическая ошибка спутниковой
навигации;
δк - среднеквадратическая ошибка комплексированной
навигации;
2. Режим определения координат только по данным от АСН. Аварийный режим. Используется в случае отказа ИСТН 12.
Также данный режим используется при отсутствии определенного азимута, при этом в процессе движения азимут с определенной точностью может быть определен, и дальнейшее движение осуществляется в штатном режиме.
3. Режим определения координат в одометрическом режиме.
Режим используется в случае постановки противником активных помех спутниковой навигации. Режим имеет достаточную точность для выполнения боевой задачи в позиционном районе действия СУ МФРТК.
Система разведки многофункционального робота
CP 9 МФР обеспечивает в дневных и ночных условиях в движении и на стоянке:
- ведение разведки противника и местности;
- определение координат целей, ориентиров и местных предметов;
- наведение электронно-оптических средств разведки в горизонтальной и вертикальной плоскостях;
- автоматическое сопровождение целей;
- предварительную обработку видеоинформации.
CP 9 МФР формирует и передает в СУ МФРТК:
- видеоинформацию телевизионного канала и тепловизионного канала;
- значения измеренных полярных координат цели, ориентиров и местных предметов;
- режимы работы CP 9 МФР;
- состояние CP 9 МФР и результаты контроля и диагностики.
CP 9 МФР обеспечивает сопряжение с БИУС 5 согласно протоколу информационно-технического взаимодействия.
ТТДМ 14 обеспечивает:
- днем дальность открыто расположенной цели типа «танк» (лобовая проекция на травяном поле) в нормальных условиях с вероятностью 0,9: обнаружение - не менее 5000 м, распознавание - не менее 4000 м;
- ночью дальность открыто расположенной цели типа «танк» (лобовая проекция на травяном поле) в нормальных условиях с вероятностью 0,9: обнаружение - не менее 2500 м, распознавание - не менее 2000 м;
- днем и ночью дальность обнаружения открыто расположенной цели типа «ростовая фигура» на травяном поле в нормальных условиях с вероятностью 0,9 - не менее 2000 м.
Нормальные условия поиска для тепловизионного канала:
- радиационная разность температур - 1,5 К;
- коэффициент пропускания атмосферы в диапазоне работы тепловизора - 0,8.
Нормальные условия поиска для телевизионного канала:
- интегральный коэффициент пропускания атмосферы - 0,8;
- видимый контраст цели - 0,3;
- горизонтальная освещенность местности - от 100 до 10000
лк.
ТТДМ 14 устанавливается на ПНС 15. ПНС 15 обеспечивает:
- сектор ведения разведки: по азимуту - 185°, по углу места - от минус 15° до ±60°;
- скорость наведения в горизонтальной и вертикальной плоскости - (0,02-10) град/с;
- перебросочная скорость в горизонтальной плоскости - не менее 30 град/с. Наведение на цель осуществляется по углу и по скорости. Обеспечиваются следующие режимы наведения: управление оператором, сканирование в заданном секторе обзора с заданной скоростью, по заданным координатам, автоматическое сопровождение движущейся цели, выбранной оператором, на выбранный оператором объект.
ПНС 15 устанавливается на ПМ 16 и обеспечивает:
- наведение на стоянке при поднятой ПМ 16 и ПМ 16, уложенной по-походному (ведение разведки и наблюдения);
- наведение и стабилизацию в движении при ПМ 16, уложенной по-походному (ведение наблюдения).
Высота подъема в рабочем положении ПНС 15 с ТТДМ 14 от уровня крыши базового шасси составляет 1,5 м. Управление ПМ 16 осуществляется дистанционно.
Система управления боевым модулем
Система управления БМ 10 имеет информационно-техническое сопряжение с БМ 10 и БИУС 5. БМ 10 формирует и передает БИУС 5:
- видеоинформацию телевизионного и тепловизорного каналов;
- состояние БМ 10, результаты контроля и диагностики.
Выносной пункт дистанционного управления
АРМ ОВ 25 обеспечивает:
- дистанционное управление функционированием и движением МФР;
- дистанционное управление CP 9 и БМ 10 (дублирующий режим);
- управление разведывательным роботом на расстоянии до 2 км;
- получение и отображение данных и видеоинформации от МФР;
- формирование и передачу команд управления;
- обмен данными с взаимодействующими объектами.
АРМ ОВ 25 имеет информационно-техническое сопряжение АРМ ОР 26, АРМ ОС 27, АРМ К 28. На АРМ ОВ 25 отображается информация: с АТЗ 6, с CP 9 МФР (дублирующий режим), с БМ 10 МФР (дублирующий режим), цифровая карта местности с обозначением местоположения робота, маршрут движения робота (заданный и пройденный), данные о своих войсках и противнике, данные о положении и состоянии робота, данные и команды, полученные с взаимодействующих объектов.
АРМ ОР 26 обеспечивает:
- дистанционное управление CP 9 при ведении разведки и наблюдения;
- получение и отображение данных и видеоинформации, получаемой от CP 9;
- формирование и передачу команд на CP 9.
На АРМ ОР 26 отображается информация: видеоинформация с CP 9 МФР, результаты измерения координат целей и объектов, данные о положении и состоянии CP 9, данные и команды, полученные с взаимодействующих объектов. АРМ ОР 26 имеет встроенную систему диагностики и контроля.
АРМ ОС 27 обеспечивает:
- дистанционное управление БМ 10;
- получение и отображение данных и видеоинформации, получаемой от БМ 10;
- формирование и передачу команд на БМ 10.
На АРМ ОС 27 отображается информация: видеоинформация со средств разведки БМ 10, результаты измерения координат целей и объектов, данные о положении и состоянии БМ 10, данные о расходе и наличии боеприпасов, данные и команды, полученные с взаимодействующих объектов. АРМ ОС 27 имеет встроенную систему диагностики и контроля.
АРМ К 28 обеспечивает:
- связь и обмен информацией (передача данных и речевая связь) по радиоканалу с взаимодействующими объектами;
- получение и отображение боевой задачи от вышестоящего начальника, нанесение положения целевого пункта на цифровую карту местности с использованием специальных тактических знаков;
- решение задач боевого управления МФРТК;
- формирование и передачу данных о положении и состоянии МФРТК;
- формирование и передачу результатов разведки и выполнения огневых задач;
- формирование и передачу данных и команд на АРМ ОВ 25;
- получение от АРМ ОВ 25 и отображение результатов разведки и выполнения огневых задач;
- топогеодезическую привязку ВПДУ 2.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании системы управления многофункционального робототехнического комплекса обеспечения боевых действий, реализующий работу робототехнического комплекса в нескольких режимах, дистанционное и полуавтономное управление следующими вариантами исполнения робототехнического комплекса: боевым, разведывательным и транспортным, связь и обмен информацией по радио и проводным каналам, работу с цифровыми картами местности, контроль функционирования комплекса, сохранность информации и программного обеспечения при сбоях и защиту информации от несанкционированного доступа.
Система управления многофункционального робототехнического комплекса обеспечения боевых действий, содержащая бортовую информационно-вычислительную систему, систему связи и передачи данных и команд управления, аппаратуру технического зрения, систему топопривязки и ориентации с аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве, аппаратуру управления целевой нагрузкой, выносной пункт управления робототехническим комплексом, программный комплекс, отличающаяся тем, что система управления выполнена с возможностью управления целевой нагрузкой в следующих вариантах исполнения робототехнического комплекса: управление разведывательным роботом, управление боевым роботом и управление транспортным роботом, переход с управления одного варианта исполнения на другой осуществляется перенастройкой программного комплекса и сменой целевой нагрузки, система управления выполнена с возможностью обеспечения следующих режимов работы: боевого, дежурного и учебно-тренировочного, бортовая информационно-вычислительная система выполнена с возможностью наращивания производительности и функциональности, ввода новых и коррекции старых алгоритмов управления, защиты от взлома и внешнего перехвата управления, система связи и передачи данных и команд управления выполнена с возможностью передачи с разведывательного робототехнического комплекса на выносной пункт управления до трех видеопотоков и данных о его положении и состоянии, обеспечения дальности обмена информацией до 2 км в условиях прямой радиовидимости и частичного перекрытия радиовидимости, канальной скорости передачи информации до 8 Мбит/с и ее адаптивное изменение в зависимости от помеховой обстановки, аппаратура технического зрения выполнена с возможностью формирования данных для управления движением робототехнического комплекса в ночных и дневных условиях, сжатия видеоинформации с изменяемым и управляемым коэффициентом сжатия, обеспечения наблюдения местности по дальности до 100 м, по горизонтальному углу 120° по курсу и 120° сзади с захватом бортов, по вертикальному углу от минус 30° до ±30°, система топопривязки и ориентации с аппаратурой спутниковой навигации и инерциальной системой ориентации в пространстве выполнена с возможностью определения начального дирекционного угла продольной оси робототехнического комплекса с предельной ошибкой ±4 д.у. за время определения не более 8 мин, определения исходных координат робототехнического комплекса со среднеквадратической ошибкой 15 м за время определения не более 5 мин, определения текущего дирекционного угла со среднеквадратической ошибкой 4 д.у., определения текущих координат со среднеквадратической ошибкой 15 м, в дифференциальном режиме - 10 м, определения углов продольного и поперечного наклонов платформы комплекса со среднеквадратической ошибкой 2 д.у., работы с цифровой картой местности: получение и отображение боевой задачи с нанесением на карте положения целевого пункта с помощью специальных тактических знаков, расчет возможных траекторий движения комплекса от пункта управления до целевого пункта, нанесение на карту текущего местоположения, определение наличия и характера изменений в районе наблюдения, аппаратура управления целевой нагрузкой - системой разведки включает в себя тепло-телевизионный дальномерный модуль, платформу наведения и стабилизации, подъемную мачту, систему управления, программный комплекс, тепло-телевизионный дальномерный модуль выполнен с возможностью обеспечения днем обнаружения и распознавания цели типа «танк» на дальности 5000 м и 4000 м соответственно, обеспечения ночью обнаружения и распознавания цели типа «танк» на дальности 2500 м и 2000 м соответственно, обеспечения днем и ночью обнаружения цели типа «ростовая фигура» на дальности 2000 м, платформа наведения и стабилизации выполнена с возможностью ведения разведки в секторе: по азимуту ±185°, по углу места от минус 15° до 60° со скоростью наведения (0,02-10) град/с, подъемная мачта выполнена с возможностью размещения на ней платформы наведения и стабилизации и перемещения в рабочее и походное положении, высота поднятия платформы наведения и стабилизации в рабочем положении составляет не менее 1,5 м от уровня крыши базового шасси, система управления аппаратурой управления целевой нагрузкой - системой разведки выполнена с возможностью передачи в систему управления робототехнического комплекса видеоинформации телевизионного и тепловизионного каналов, значений измеренных координат цели, ориентиров и местных предметов, система управления аппаратурой управления целевой нагрузкой - боевым модулем выполнена с возможностью передачи в систему управления робототехнического комплекса, кроме видеоинформации, результатов стрельбы и информации о состоянии боевого модуля, выносной пункт управления робототехническим комплексом включает в себя носимые автоматизированные рабочие места оператора-водителя, оператора-разведчика, оператора-стрелка и командира и выполнен с возможностью формирования команд управления параметрами системы разведки, подъемной мачтой, наведением оптико-электронных средств разведки, измерениями координат целей и объектов, боевым модулем.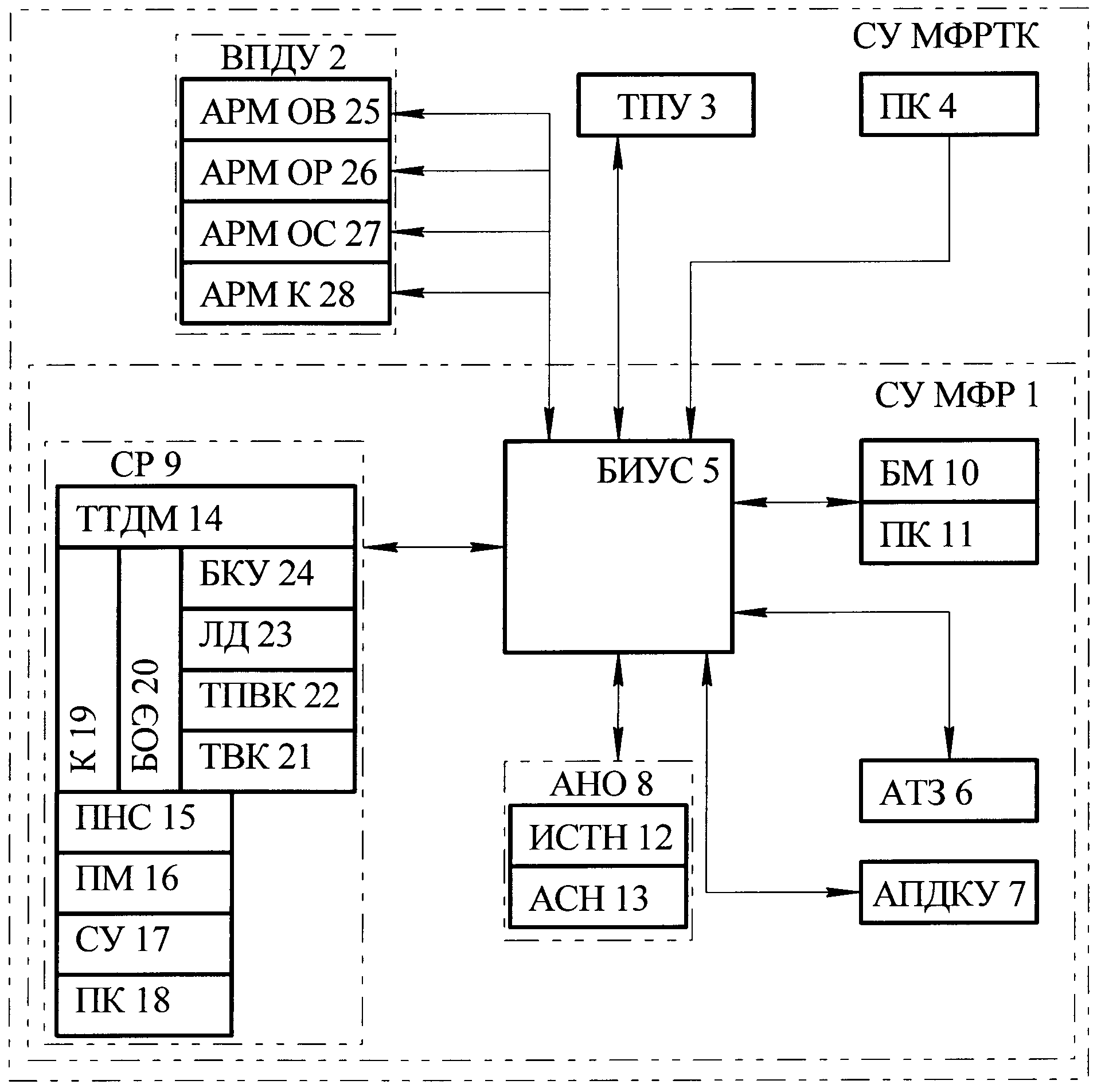
Роботизированная транспортная платформа
Дульный тормоз
Установочный комплект для крепления оборудования на наружных поверхностях кузова-фургона топопривязчика
Унифицированный вкладной ствол
Способ проведения регулировочно-настроечных операций аппаратуры системы топопривязки и навигации
Способ производства деталей из стальных отливок
Индуктор для нагрева внутренних поверхностей сквозных отверстий диаметром 20...30 мм
Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации и бортовой эвм
Способ функционирования топопривязчика в составе автоматизированной системы управления войсками
Коробка для пулеметной ленты
Огнестрельное оружие с подвижным стволом
Информационно-управляющая система робототехнического комплекса боевого применения
Механизм пусковой учебный
Устройство для фиксации визирного оптического прибора
Гирокомпас
Способ боевого применения мобильного комплекса дистанционно-управляемого оружия
Механический прицел огнестрельного оружия
Система перекачивания топлива
Воздушная мишень
Кронштейн

