Результат интеллектуальной деятельности: УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ЧЕРНЫЙ ЯЩИК)
Вид РИД
Изобретение
Предлагаемое устройство относится к области приборостроения и может быть использовано для оперативной регистрации и контроля технического состояния и функционирования автомобилей, а также психофизиологического состояния водителей при расследовании дорожно-транспортных происшествий (ДТП) в качестве «черного ящика».
Ежегодно в результате ДТП гибнут и получают увечья десятки тысяч людей, материальные потери составляют миллионы долларов. На протяжении последних лет прогресс автомобильного транспорта и значительное усложнение конструкций современных автомобилей приводили к неуклонному повышению значимости контроля технического состояния, функционирования и эффективности работы автомобилей. Рост интенсивности дорожного движения и требований к его безопасности поставили задачу постоянного контроля психофизиологического состояния водителей при расследовании дорожно-транспортных происшествий.
Известны устройства контроля параметров движения транспортных средств (авт. свид. СССР №№457.054, 794.575, 915.035, 926.611, 1.327.713, 1.693.622; патенты РФ №№2.003.109, 2.021.927, 2.169.929, 2.184. 992, 2.190.238, 2.221.584, 2.222.830, 2.262.707, 2.308.766, 2.481.641; патенты США №№3.841.427, 3.898.652; Дикарев В.И. Безопасность, защита и спасение человека. Монография. Санкт-Петербург, 2007, с. 78-104 и др.).
Из известных устройств наиболее близким к предлагаемому является «Устройство контроля параметров движения транспортного средства» (патент РФ №2.481.641, G07C 5/08, 2011), которое и выбрано в качестве прототипа.
Указанное устройство обеспечивает определение среднего значения временной Vt и пространственной Vs скоростей, регистрацию и контроль технического состояния и функционирования транспортного средства, а также психофизиологического состояния водителей до и в момент совершения ДТП, дистанционную передачу сигналов бедствия и контролируемых параметров на пункт контроля после совершения ДТП с использованием сложных сигналов с фазовой манипуляцией (ФМн) и псевдослучайной перестройкой рабочей частоты (ППРЧ).
При этом точное и оперативное определение географических координат транспортного средства, совершившего ДТП, имеет важное значение, особенно в тех случаях, когда водитель и пассажир транспортного средства в результате ДТП не имеет физической возможности сообщить об этом и нуждается в скорой медицинской помощи.
Однако в условиях организованных и непреднамеренных помех, многолучевого распространения радиоволн, характерных для крупных мегаполисов, достоверность и помехоустойчивость приема GPS-сигналов на транспортном средстве и сложных ФМн сигналов с псевдослучайной перестройкой рабочей частоты на пункте контроля снижаются.
Технической задачей изобретения является повышение достоверности и помехоустойчивости приема GPS-сигналов на транспортном средстве и сложных ФМн сигналов с псевдослучайной перестройкой рабочей частоты на пункте контроля в условиях организованных и непреднамеренных помех, многолучевого распространения радиоволн, характерных для крупных мегаполисов, путем ослабления узкочастотных помех.
Поставленная задача решается тем, что устройство контроля параметров движения транспортного средства, содержащее, в соответствии с ближайшим аналогом, последовательно включенные датчик импульсов пути, первый счетчик импульсов, первый микропроцессор, второй вход которого через второй счетчик импульсов соединен с выходом эталонного датчика времени, а выход является первым выходом устройства, последовательно подключенные к второму выходу датчика импульсов пути блок управления, второй вход которого соединен с выходом эталонного датчика времени, третий счетчик импульсов и второй микропроцессор, второй вход которого соединен с вторым выходом первого счетчика импульсов, а выход является вторым выходом устройства, датчик состояния тормозной системы, датчик состояния приборов сигнализации, датчик состояния фар, датчик усилия сжатия рулевого колеса, распределительный блок, многоканальный усилительно-кодирующий блок, блок выбора режима работы, генератор тока стирания, датчик движения транспортного средства, стабилизатор напряжения, электродвигатель, лентопротяжный механизм, кассету с роликами и магнитной лентой, универсальную магнитную головку, стирающую магнитную головку, контрольную лампу, блок декорирования, фазовой манипулятор, усилитель мощности, передающую антенну и пункт контроля, при этом первый и второй выходы эталонного датчика времени, выходы датчика тормозной системы, датчика состояния приборов сигнализации, датчика состояния фар, датчика усилия сжатия рулевого колеса, первый и второй выходы устройства через последовательно соединенные распределительный блок и многоканальный усилительно-кодирующий блок подключены к универсальной магнитной головке, второй вход многоканального усилительно-кодирующего блока соединен с первый выходом блока выбора режима работы, второй выход которого через генератор тока стирания подключен к стирающей магнитной головке, а его третий выход через последовательно соединенные стабилизатор напряжения, электродвигатель и лентопротяжный механизм подключен к контрольной лампе, управляющий вход эталонного датчика времени соединен с первым выходом датчика движения транспортного средства, второй выход которого соединен с вторым входом стабилизатора напряжения, к второму выходу многоканального усилительно-кодирующего блока подключен блок декодирования, передающая антенна. При этом к входу второй приемной антенны последовательно подключены приемник GPS-сигналов, третий перемножитель, второй вход которого соединен с выходом второго фильтра нижних частот, второй узкополосный фильтр, четвертый перемножитель, второй вход которого соединен с выходом приемника GPS-сигналов, и второй фильтр нижних частот, к выходу второй линии задержки последовательно подключены сумматор, второй вход которого соединен с вторым входом многоканального усилительно-кодирующего блока, фазовый манипулятор, второй смеситель, второй вход которого через синтезатор частот второго гетеродина соединен с выходом первого гетеродина и псевдослучайной последовательностью, усилитель первой промежуточной частоты, усилитель мощности и передающая антенна, к выходу первого синхронизатора последовательно подключены первый генератор псевдослучайной последовательности и синтезатор несущих частот, второй вход которого соединен с вторым выходом блока выбора режима, а выход подключен к второму входу фазового манипулятора, пункт контроля выполнен в виде последовательно включенных первой приемной антенны, усилителя высокой частоты, первого смесителя, усилителя второй промежуточной частоты, удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом усилителя второй промежуточной частоты, порогового блока, второй вход которого через первую линию задержки соединен с его выходом, ключа, второй вход которого соединен с выходом усилителя второй промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом первого фильтра нижних частот, первого узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом ключа, и первого фильтра нижних частот, последовательно подключенных к выходу второго синхронизатора второго генератора псевдослучайной последовательности и синтезатор частот первого гетеродина, второй вход которого через блок поиска соединен с выходом порогового блока, а выход подключен к второму входу первого смесителя, а также блока регистрации, отличается от ближайшего аналога тем, что оно снабжено пятым, шестым, седьмым и восьмым перемножителями, третьим и четвертым узкополосными фильтрами, третьим и четвертым фильтрами нижних частот, четырьмя фазоинверторами и двумя вычитателями, причем к выходу приемника GPS-сигналов последовательно подключены пятый перемножитель, второй вход которого соединен с выходом второго фазоинвертора, третий узкополосный фильтр, первый фазоинвертор, шестой перемножитель, второй вход которого соединен с выходом приемника GPS-сигналов, третий фильтр нижних частот и второй фазоинвертор, вход второй линии задержки через первый вычитатель соединен с выходами второго и третьего фильтров нижних частот, к выходу ключа последовательно подключены седьмой перемножитель, второй вход которого соединен с выходом четвертого фазоинвертора, четвертый узкополосный фильтр, третий фазоинвертор, восьмой перемножитель, второй вход которого соединен с выходом ключа, четвертый фильтр нижних частот и четвертый фазоинвертор, вход блока регистрации через второй вычитатель соединен с выходами первого и четвертого фильтра нижних частот.
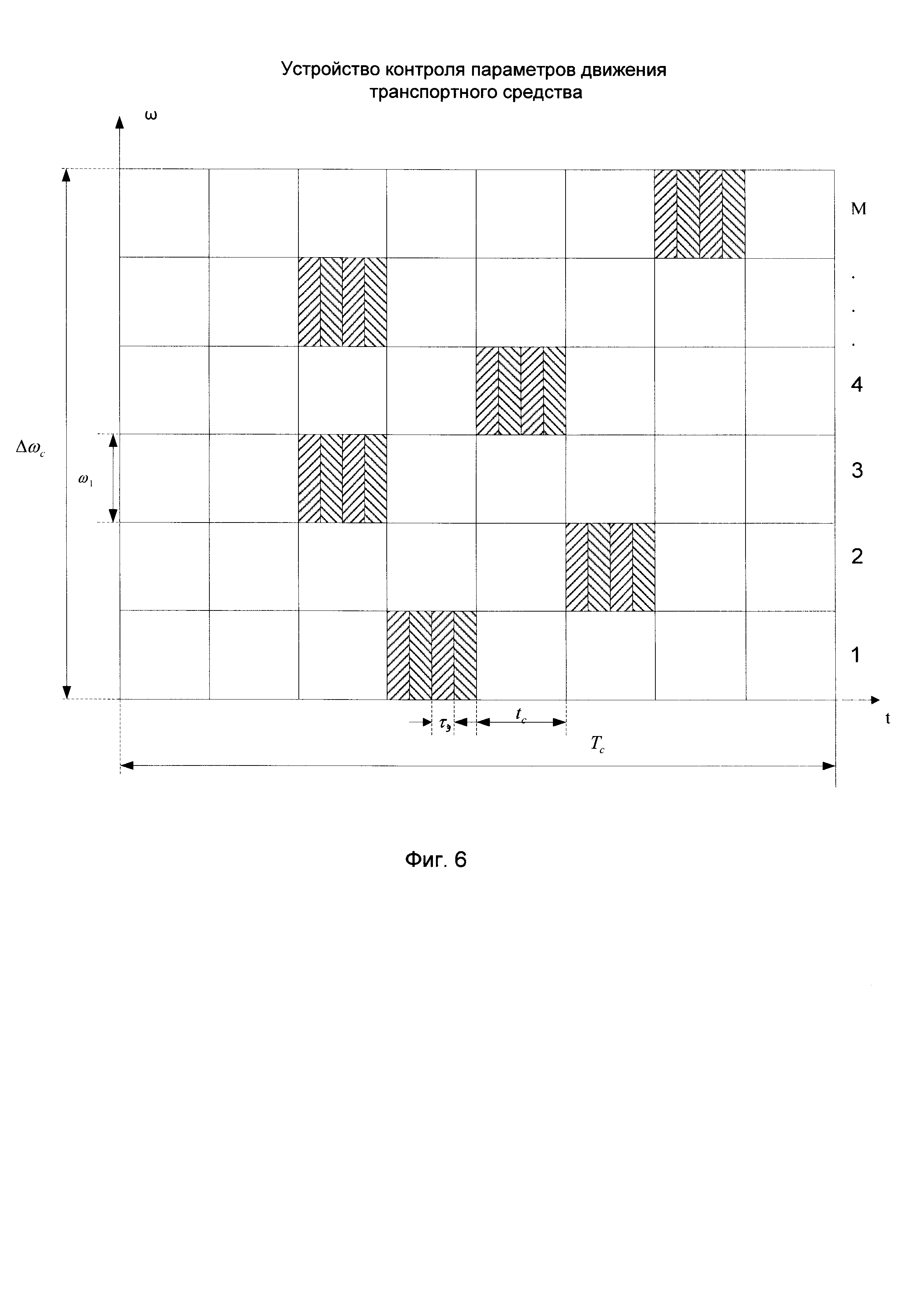
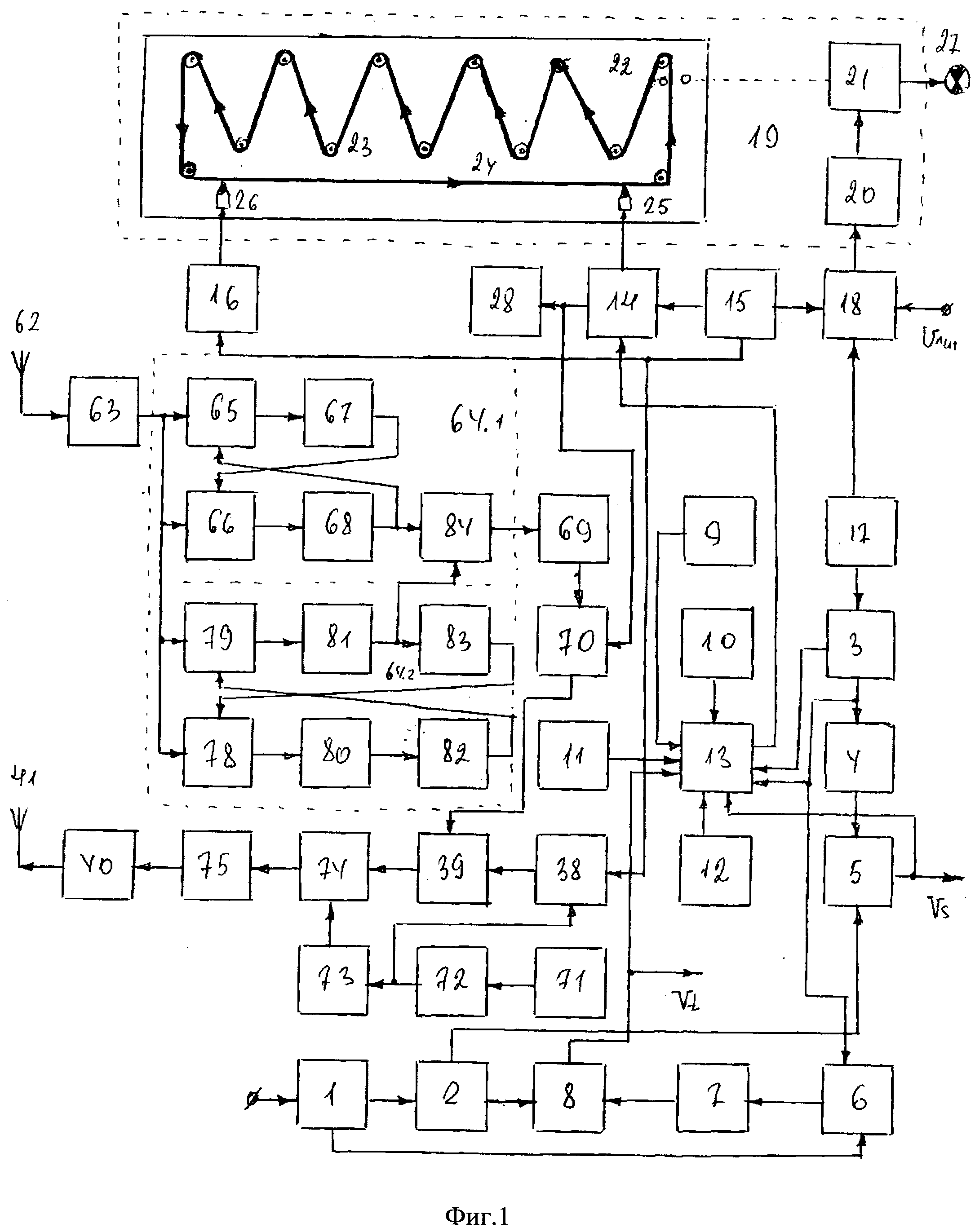
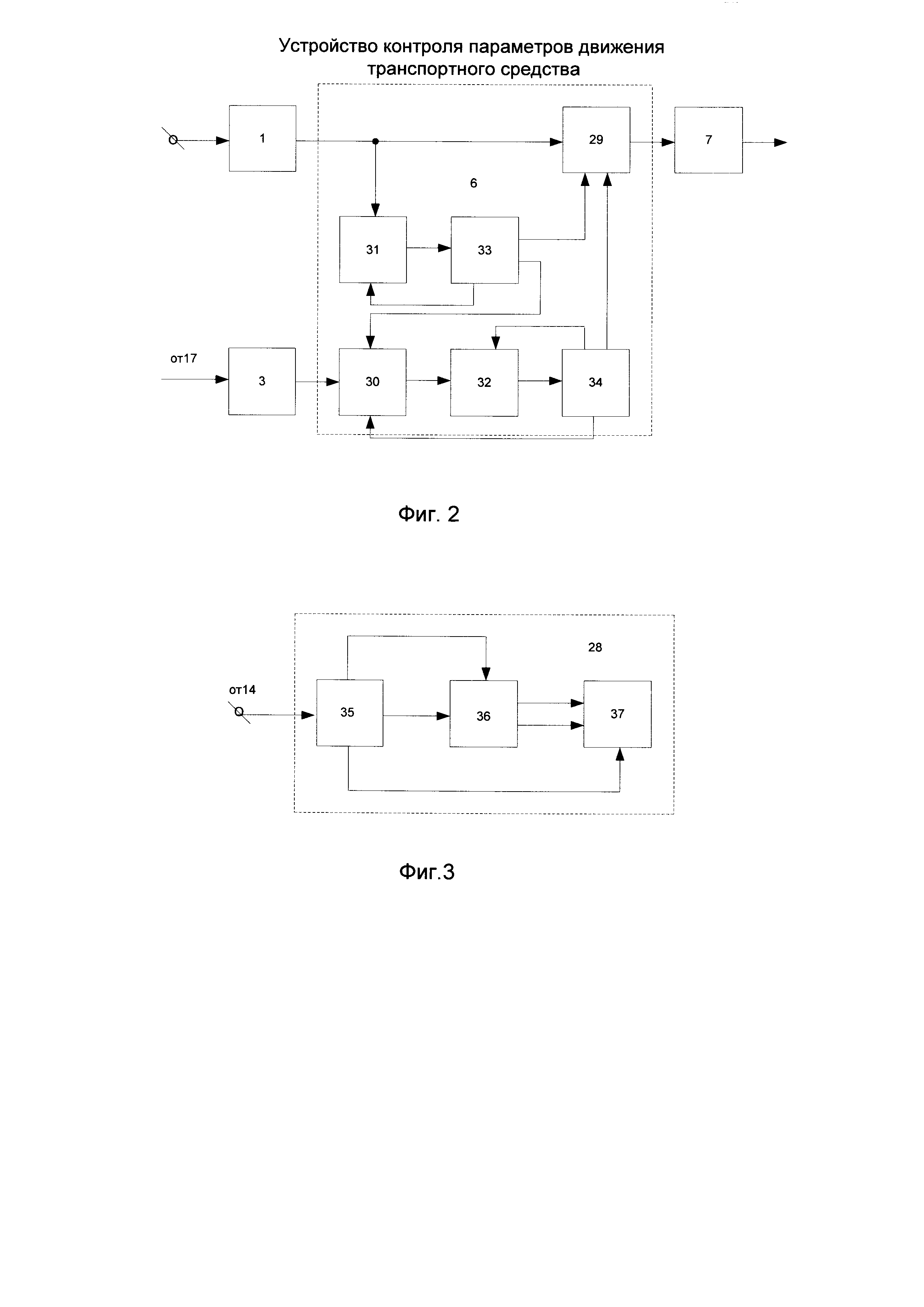
Структурная схема предлагаемого устройства представлена на фиг. 1. Структурная схема блока 6 управления изображена на фиг. 2. Структурная схема блока 28 декодирования представлена на фиг. 3. Структурная схема пункта контроля изображена на фиг. 4. Частотная диаграмма, поясняющая процесс преобразования сигналов по частоте, представлена на фиг. 5. Фрагмент частотно-временной матрицы используемых сигналов с псевдослучайной перестройкой рабочей частоты (ППРЧ) приведен на фиг. 6.
Устройство контроля параметров движения транспортного средства содержит последовательно включенные датчик 1 импульсов пути, первый счетчик 2 импульсов, первый микропроцессор 5, второй вход которого через второй счетчик 4 импульсов соединен с выходом эталонного датчика 3 времени, а выход является первым выходом устройства, последовательно подключенные к второму выходу датчика 1 импульсов пути блок 6 управления, второй вход которого соединен с выходом эталонного датчика 3 времени, третий счетчик 7 импульсов и второй микропроцессор 8, второй вход которого соединен с вторым выходом первого счетчика 2 импульсов, а выход является вторым выходом устройства, датчик 9 состояния тормозной системы, датчик 10 состояния приборов сигнализации, датчик 11 состояния фар, датчик 12 усилия сжатия водителем («хвата») рулевого колеса, распределительный блок 13, многоканальный усилительно-кодирующий блок 14, блок 15 выбора режима работы, генератор 16 тока стирания, датчик 17 движения транспортного средства, управляемый стабилизатор 18 питающего напряжения, контейнер 19, электродвигатель 20, лентопротяжный механизм 21, кассету 22 с роликами 23 и «бесконечной» магнитной лентой 24, универсальную магнитную головку 25, стирающую магнитную головку 26, контрольную лампу 27, блок 28 декодирования, фазовый манипулятор 39, усилитель 40 мощности, передающую антенну 41, синтезатор 38 несущих частот, вторую приемную антенну 62, приемник 63 GPS-сигналов, второй демодулятор 64 фазоманипулированного сигнала, третий 65 и четвертый 66 перемножители, второй узкополосный фильтр 67, второй фильтр 68 нижних частот, вторую линию 69 задержки, сумматор 70, первый синхронизатор 71, первый генератор 72 псевдослучайной последовательности (ПСП), синтезатор 73 частот второго гетеродина, второй смеситель 74 и усилитель 75 первой промежуточной частоты. Причем первый и второй выходы устройства, первый и второй выходы эталонного датчика 3 времени, выходы датчика 9 состояния тормозной системы, датчика 10 состояния приборов сигнализации, датчика 11 состояния фар, датчика 12 усилия сжатия водителем рулевого колеса через последовательно соединенные распределительный блок 13 и многоканальный усилительно-кодирующий блок 14 подключены к универсальной магнитной головке 25, второй вход многоканального усилительно-кодирующего блока 14 соединен с первым выходом блока 15 выбора режима работы, второй выход которого через генератор 16 тока стирания подключен к стирающей магнитной головке 26, а его третий выход через последовательно соединенные стабилизатор 18 напряжения, электродвигатель 20 и лентопротяжный механизм 21 подключен к контрольной лампе 27, управляющий вход эталонного датчика 3 времени соединен с первым выходом датчика 17 движения транспортного средства, второй выход которого соединен с вторым входом стабилизатора 18 напряжения к выходу второй приемной антенны 62 последовательно подключены приемник 63 GPS-сигналов, третий перемножитель 65, второй вход которого соединен с выходом второго фильтра 68 нижних частот, второй узкополосный фильтр 67, четвертый перемножитель 66, второй вход которого соединен с выходом приемника 63 GPS-сигналов, второй фильтр 68 нижних частот, первый вычитатель 84, вторая линия задержки 69, сумматор 70, второй вход которого соединен с вторым выходом многоканального усилительно-кодирующего блока 14, фазовый манипулятор 39, второй смеситель 74, второй вход которого соединен с выходом синтезатора 73 частот второго гетеродина, усилитель 75 первой промежуточной частоты, усилитель 40 мощности и передающая антенна 41. К выходу первого синхронизатора 71 последовательно подключены первый генератор 72 ПСП и синтезатор 38 несущих частот, второй вход которого соединен с вторым выходом блока 15 выбора режима работы, а выход подключен к второму входу фазового манипулятора 39. Вход синтезатора 73 частот второго гетеродина соединен с выходом первого генератора 72 ПСП.
К выходу приемника 63 GPS-сигналов последовательно подключены пятый перемножитель 78, второй вход которого соединен с выходом второго фазоинвертора 83, третий узкополосный фильтр 80, первый фазоинвертор 82, шестой перемножитель 79, второй вход которого соединен с выходом приемника 63 GPS-сигналов, третий фильтр 81 нижних частот и второй фазоинвертор 83. Второй вход первого вычитателя 84 соединен с выходом третьего фильтра 81 нижних частот.
Блок 6 управления содержит первый 29 и второй 30 ключи, четвертый 31 и пятый 32 счетчики импульсов, первый 33 и второй 34 пороговые блоки.
Блок 28 декодирования состоит из преобразующего устройства 35, пульта 36 управления и магнитоэлектрического осциллографа 37.
Лентопротяжный механизм 21 обеспечивает движение магнитной ленты 24 вокруг роликов 23 в кассете 22. Он приводится в движение электродвигателем 20. Электродвигатель 20, лентопротяжный механизм 21 и кассета 22 помещены в защитный контейнер 19 («черный ящик»), обеспечивающий сохранение записи при воздействии ударной перегрузки до 10 ед., статической распределенной нагрузки до 100 кг/см2 и теплового удара до 100°C в течение 20 мин.
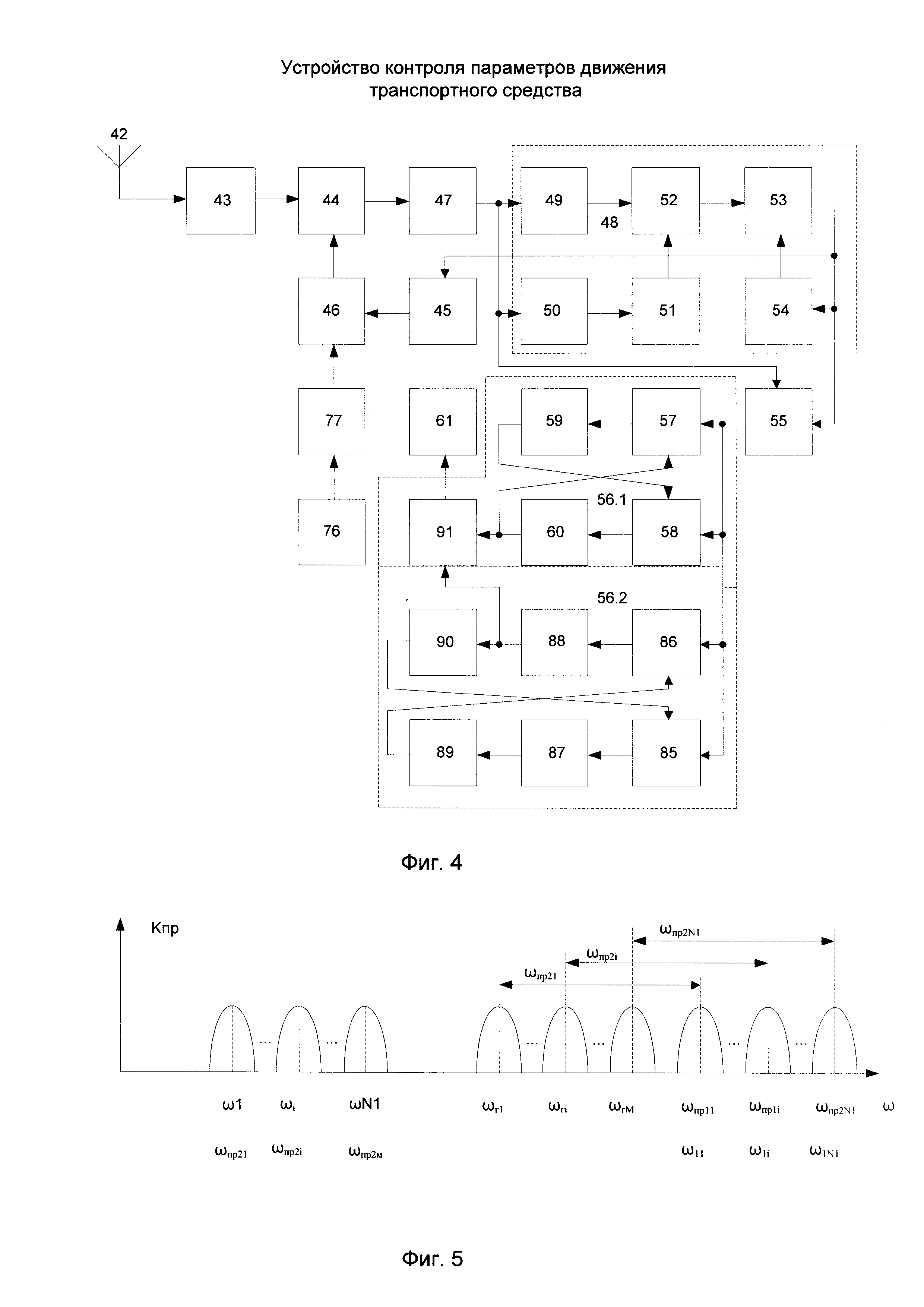
Пункт контроля содержит последовательно включенные первую приемную антенну 42, усилитель 43 высокой частоты, смеситель 44, второй вход которого через синтезатор 46 частот первого гетеродина соединен с выходом блока 45 поиска, усилитель 47 второй промежуточной частоты, удвоитель 50 фазы, второй измеритель 51 ширины спектра, блок 52 сравнения, второй вход которого через первый измеритель 49 ширины спектра соединен с выходом усилителя 47 второй промежуточной частоты, пороговый блок 53, второй вход которого через линию 54 задержки соединен с его выходом, ключ 55, второй вход которого соединен с выходом усилителя 47 второй промежуточной частоты, первый перемножитель 57, второй вход которого соединен с выходом первого фильтра 60 нижних частот, второй вычитатель 91 и блок 61 регистрации. Управляющий вход блока 45 поиска соединен с выходом порогового блока 53. Выход второго синхронизатора 76 через второй генератор 77 ПСП подключен к второму входу синтезатора 46 частот первого гетеродина.
К выходу ключа 55 последовательно подключены седьмой перемножитель 85, второй вход которого соединен с выходом четвертого фазоинвертора 90, четвертый узкополосный фильтр 87, третий фазоинвертор 89, восьмой перемножитель 86, второй вход которого соединен с выходом ключа 55, четвертый фильтр 88 нижних частот и четвертый фазоинвертор 90. Второй вход второго вычитателя 91 соединен с выходом четвертого фильтра 88 нижних частот.
Измерители 49 и 51 ширины спектра, удвоитель 50 фазы, блок 52 сравнения, пороговый блок 53 и линия 54 задержки образуют обнаружитель 48 сложного сигнала.
Перемножители 57 и 58, узкополосный фильтр 59 и фильтр 60 нижних частот образуют первый демодулятор 56 фазоманипулированного (ФШ) сигнала.
Принцип регистрации и контроля технического состояния и функционирования транспортного средства, а также психофизиологического состояния водителя основан на использовании «бесконечной» магнитной ленты, запись на которой хранится в течение интервала времени, определяемого скоростью движения и длиной магнитной ленты. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной и стирающей магнитных головок.
Устройство имеет два режима и работает следующим образом.
Выбор режима «запись-стирание» или «воспроизведение» осуществляется блоком 15. В первом режиме «запись-стирание» многоканальный усилительно-кодирующий блок 14 подключается к универсальной магнитной головке 25, а генератор 16 тока стирания - к стирающей магнитной головке 26. Устройство начинает работу с началом движения транспортного средства. При этом в блоке 6 управления оба ключа 29 и 30 закрыты для прохождения импульсов пути от датчика 1 импульсов пути и эталонного датчика 3 импульсов времени. Поступающие в счетчик 31 импульсы пути заполняют его разряды. По достижении заданного числа импульсов, определяемых пороговым уровнем, выбираемым (устанавливаемым) в пороговом блоке 33, последний выдает сигнал на обнуление счетчика 31 и замыкание ключей 29 и 30. С этого момента импульсы пути от датчика 1 поступают в счетчик 7, а эталонные импульсы от датчика 3 - в счетчик 32, который подсчитывает импульсы в течение установленного временного интервала, определяемого числом эталонных импульсов, равного пороговому уровню, устанавливаемому в пороговом блоке 34. По окончании этого временного интервала пороговый блок 34 выдает сигнал на обнуление счетчика 32 и закрытие ключей 29 и 30 для прохода импульсов пути и эталонных импульсов через эти ключи. Тем самым измерения временной скорости Vt производятся через одинаковые отрезки пути и заканчиваются через одинаковые отрезки времени. Вычисление среднего значения временной скорости Vt производится микропроцессором 8 как частное от деления числа импульсов пути, зафиксированного в счетчике 7, на общее число импульсов пути, зафиксированное в счетчике 2, умноженное на масштабирующий коэффициент. Вычисленные средние значения временной скорости Vt и пространственной скорости Vs поступают на первый и второй выходы устройства и на первый и второй входы распределительного блока 13, а затем через многоканальный усилительно-кодирующий блок 14 записываются на движущуюся магнитную ленту 24. На магнитной ленте 24 фиксируется также состояние тормозной системы, при этом на ленту записываются величина давления в тормозной системе, контролируемая датчиком 9, состояние приборов сигнализации, контролируемое датчиком 10, состояние фар (ближний или дальний свет), контролируемое датчиком 11, состояние и реакция водителя, контролируемые датчиком 12, как величина давления рук водителя на рулевое колесо, а также временные метки, контролируемые эталонным датчиком 3. Причем в качестве датчика 9 давления в тормозной системе могут быть использованы манометры с индуктивным, емкостным или потенциометрическим преобразователем. В качестве датчика 10 состояния приборов сигнализации могут быть использованы герконы, диоды, фоторегистры и светодиоды. В качестве датчика 11 состояния фар (ближний или дальний свет) могут быть использованы герконы, диоды, светодиоды.
Таким образом, в режиме «запись-стирание» осуществляется постоянная запись на магнитную ленту 24 контролируемых параметров с привязкой их величин к бортовому времени, отсчет которого ведет эталонный датчик 3 времени. Указанный датчик начинает генерацию меток времени с момента подключения питающего напряжения к бортовой сети транспортного средства. Запись хранится в течение интервала времени, определяемого скоростью движения и длиной магнитной ленты. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассете 22 на роликах 23 в натянутом состоянии с возможностью движения мимо универсальной 25 и стирающей 26 магнитных головок.
Движение магнитной ленты относительно магнитных головок начинается с началом движения транспортного средства и прекращается при его остановке, что контролируется датчиком 17. Для визуальной индикации движения магнитной ленты служит контрольная лампа 27, на которую подаются сигналы от лентопротяжного механизма 21. При нормальной работе лентопротяжного механизма 21 контрольная лампа 27, устанавливаемая на приборном щитке, работает в режиме проблесковой индикации. Датчик 17 подает управляющий сигнал на стабилизатор 18 питающего напряжения, которое по этому сигналу поступает на электродвигатель 20. Необходимость применения стабилизатора 18 питающего напряжения обусловлена значительными колебаниями напряжения в бортовой сети транспортного средства и требованиями к его стабильности для обеспечения нормальной работы лентопротяжного механизма 21 и высокого качества записи. Кроме того, датчик 17 подает управляющий сигнал на эталонный датчик 3 временных меток, который продолжает отсчет времени и при остановке транспортного средства, а в момент его трогания с места датчик 3 по управляющему сигналу с второго выхода через распределительный блок 13 и многоканальный усилительно-кодирующий блок 14 выдает на соответствующую дорожку магнитной ленты 24 импульсную посылку, соответствующую состоянию эталонного датчика 3 на момент окончания временного интервала нахождения транспортного средства в состоянии покоя.
Таким образом, в первом режиме работы устройства осуществляется запись на магнитную ленту объективно контролируемых параметров транспортного средства и состояния водителя.
Во втором режиме устройство позволяет воспроизвести с помощью блока 28 декодирования содержание записанной на магнитной ленте 24 информации. В этот режим устройство переводится блоком 15 выбора режима работы, который отключает от стирающей магнитной головки 26 генератор 16 тока стирания, переводит многоканальный усилительно-кодирующий блок 14 на работу в режим «воспроизведение», т.е. входными сигналами данного блока становятся сигналы, считываемые с магнитной ленты 24 универсальной магнитной головкой 25, а выходные сигналы поступают в блок 28 декодирования. В этом режиме датчики 9-12 отключаются от универсальной магнитной головки 25, а на управляющий вход стабилизатора 18 питающего напряжения подается управляющее напряжение с третьего выхода блока 15 выбора режима работы устройства.
Блок 28 декодирования состоит из последовательно включенных преобразующего устройства 35, пульта 36 управления и магнитоэлектронного осциллографа 37. Указанный блок воспроизводит с магнитной ленты 24 системы импульсов, распределяет их по соответствующим каналам, преобразует время-импульсную модуляцию в широтно-импульсную модуляцию, формирует напряжения, пропорциональные длительности широтно-модулированных сигналов с последующей записью их на фотобумагу с помощью магнитоэлектронного осциллографа 37.
Во втором режиме управляющим сигналом со второго выхода блока 15 выбора режима работы включается синтезатор 38 несущих частот. С помощью первого синхронизатора 71 включается первый генератор 72 ПСП, который, в свою очередь, управляет работой синтезатора 38 несущих частот и синтезатора 73 частот второго гетеродина.
На выходе синтезатора 38 несущих частот последовательно во времени формируется сетка высокочастотных колебаний различных несущих частот
где Vi, ωi, ϕ1, Tc - амплитуды, несущие частоты, начальные фазы и длительность высокочастотных колебаний; i=1,2,……, М;
M - число используемых несущих частот (число частотных каналов);
M=Δωс/Δω1 (фиг. 6);
Δωс - ширина полосы частот расширенного спектра используемого сигнала;
Δω1 - ширина полосы одного частотного канала;
tc - временной интервал между переключениями частот, характеризует собой время работы на одной несущей частоте.
В зависимости от соотношения времени работы на одной частоте tc и длительности τэ информационных символов псевдослучайная перестройка частоты (ППРЧ) может быть разделена на: межсимвольную, посимвольную и внутрисимвольную.
При межсимвольной ППРЧ n информационных символов (n≥2) передаются на одной частоте, при этом tc=n*τэ.
Сформированные высокочастотные колебания последовательно во времени поступают на первый вход фазового манипулятора 39.
Для определения местоположения транспортного средства (широты и долготы) используется приемник 63 GPS-сигналов с приемной антенной 62. Указанный приемник принимает сложный сигнал с фазовой манипуляцией (ФМН)
Uc(t)=Vc * cos[ωct+ϕk(t)+ϕс], 0≤t≤Tc,
где ϕk(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с моделирующим кодом M(t) (Код С/А) длиной N=1023 символа, причем ϕk(t)=const при Kτэ<t<(K+1)τэ и может изменяться скачком при t=Kτэ, т.е. на границах между элементарными посылками (К=1,2,……N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс (Тс=N*τэ),
который с выхода приемника 63 GPS-сигналов поступает на входы перемножителей 65, 66, 78 и 79. На вторые входы перемножителей 66 и 79 с выходов узкополосного фильтра 67 и фазоинвертора 82 подаются опорные напряжения соответственно:
U01(t)=V0 * cos[ωct+ϕс],
U02(t)=-V0 * cos[ωct+ϕс], 0≤t≤Tc.
В результате перемножения указанных сигналов образуются результирующие напряжения:
UΣ1 (t)=VH * cosϕk(t)+VH * cos[2ωct+ϕk(t)+2ϕс],
UΣ2 (t)=VH * cosϕk(t)-VH * cos[2ωct+ϕk(t)+2ϕс],
где VH=1/2Vc * V0.
Аналоги моделирующего кода M1(t):
UH1(t)=VH* cosϕk(t),
UH2(t)=-VH* cosϕk(t),
выделяются фильтрами 68 и 81 нижних частот соответственно и подаются на два входа вычитателя 84. Вычитая одно из другого указанные напряжения с учетом их противоположной полярности, на выходе вычитателя 84 образуется удвоенное (суммарное) низкочастотное напряжение
UH(t)=UH1(t)-UH2(t)=2VH * cosϕk(t),
то есть получается сложение по абсолютной величине напряжений UH1(t) и UH2(t). При этом амплитудные аддитивные помехи проходят через два демодулятора 64.1 и 64.2 одинаково, изменяя амплитуды выходных продетектированных напряжений в одну и ту же сторону. Но в вычитателе 84 они вычитаются, оставаясь однополярными, то есть подавляются, взаимно компенсируются.
Низкочастотное напряжение UH2(t) с выхода фильтра 81 нижних частот одновременно поступает на вход фазоинвертора 83, на выходе которого образуется низкочастотное напряжение
UH3(t)=VH* cosϕk(t).
Низкочастотные напряжения UH1(t) и UH3(t) с выхода фильтра 68 нижних частот и фазоинвертора 83 поступают на второй вход перемножителей 65 и 78 соответственно, на выходе которых образуются гармонические напряжения:
U01(t)=V1 * cos(ωct+ϕс)+V1 * cos[ωct+2ϕk(t)+ϕс]=
=2V1 * cos(ωct+ϕс)=Vo * cos(ωct+ϕс),
U03(t)=V1 * cos(ωct+ϕс)+V1 * cos[ωct+2ϕk(t)+ϕс]=
=2V1 * cos(ωct+ϕс)=Vo * cos(ωct+ϕс),
где V1=1/2 VH * Vc;
2V1=V0; 2ϕk(t)={0, 2π}.
Данные напряжения выделяются узкополосными фильтрами 67 и 80 соответственно. Напряжение U01(t) с выхода узкополосного фильтра 67 подается на второй вход перемножителя 66. Напряжение U03(t) выделяется узкополосным фильтром 80 и поступает на вход фазоинвертора 82, на его выходе образуется напряжение
UO2(t)=-VO * cos(ωct+ϕс),
которое подается на второй вход перемножителя 79.
Низкочастотное напряжение UH(t), пропорциональное моделирующему коду M1(t), с выхода вычитателя 84 через линию 69 задержки поступает на первый вход сумматора 70. Время задержки Тз линии 69 задержки выбирается равной длительности Tc сигнала (Тз=Тс). На второй вход сумматора 70 подается модулирующий код M2(t) с выхода многоканального усилительно-кодирующего блока 14, отображающий контролируемые параметры транспортного средства и состояния водителя. На выходе сумматора 70 формируется суммарный моделирующий код
MΣ=M1(t)+M2(t),
который подается на второй вход фазового манипулятора 39. На выходе фазового манипулятора 39 образуется сложный сигнал с фазовой манипуляцией (ФМн)
Uci (t)=Vi * cos[ωit+ϕki(t)+ϕi], 0≤t≤tc,
где ϕki={O,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с моделирующим кодом MΣ(t);
который поступает на первый вход смесителя 74, на второй вход которого подаются напряжения синтезатора 73 частот второго гетеродина

которые формируются последовательно во времени с помощью генератора 72 ПСП, управляемого синхронизатором 71. На входе смесителя 74 образуются напряжения комбинационных частот. Усилителем 75 выделяется напряжение первой промежуточной (суммарной) частоты
Uпр1i (t)=Vпр1i * cos[ωпр1i+ϕki(t)+ϕпр1i],
где Uпр1i (t)=1/2Vi * Vг1i;
ϕпр1i=ϕ1+ϕгi,
которое после усиления в усилителе мощности 40 поступает в передающую антенну 41, излучается ею в эфир на частоте ω1i=ωпр1i, улавливается приемной антенной 42 пункта контроля и через усилитель 43 высокой частоты поступает на первый вход смесителя 44, на второй вход которого подаются напряжения синтезатора 46 первого гетеродина линейно-изменяющейся частоты

где γ=Df/Tn - скорость изменения частот в диапазоне Df, которые формируются последовательно во времени с помощью генератора 77 ПСП, управляемого синхронизатором 76, и блока 45 поиска.
Следовательно, поиск сложных ФМн сигналов с ППЧР осуществляется в заданном диапазоне частот Df с помощью блока 45 поиска, который по линейному закону изменяет частоты синтезатора 46 первого гетеродина. На выходе смесителя 44 образуются напряжения комбинационных частот. Усилителем 47 выделяются напряжения второй промежуточной (разностной) частоты
Uпр2i (t)=Vпр2i * cos[ωnp2it+ϕki(t)-πγt2+ϕnp2i],
где  ;
;
ωпр2i=ωпр1i-ωгi - вторая промежуточная (разностная) частота;
ϕпр2i=ϕпр1i-ϕгi.
Это напряжение представляет собой сложный сигнал с комбинированной фазовой манипуляцией и линейной частотной модуляцией (ФМн-ЛЧМ) с ППЧР. Оно поступает на вход обнаружителя 48, состоящего из измерителей 49 и 51 ширины спектра, блока 52 сравнения, удвоителя 50 фазы, порогового блока 53 и линии задержки 54. На выходе удвоителя 50 фазы образуется напряжение
U2i (t)=V2i * cos[ωnp2it-2ππγt2+ϕnp2i],
в котором фазовая манипуляция уже отсутствует.
Ширина спектра Δf2 второй гармоники сигнала определяется длительностью Тс сигнала
Δf2=1/Tc,
тогда как ширина спектра Δfc принимаемого ФМн сигнала с ППРЧ определяется длительностью Tэ его элементарных посылок
Δfc=1/τэ,
т.е. ширина спектра Δf2 второй гармоники сигнала в N раз меньше ширины спектра Δfc входного сигнала Δfc/Δf2=N.
Следовательно, при умножении фазы сложного ФМн сигнала с ППРЧ на два его ширина спектра «сворачивается» в N раз. Это обстоятельство и позволяет обнаружить сигнал даже тогда, когда его мощность на входе приемника меньше мощности шумов и помех.
Ширина спектра Δfc входного сигнала измеряется с помощью измерителя 49, а ширина спектра Δf2 второй гармоники сигнала измеряется с помощью измерителя 51. Напряжение V1 и V2, пропорциональные Δfc и Δf2 соответственно с выходом измерителей 49 и 51 ширины спектра поступают на два входа блока 52 сравнения. Так как V1>>V2, то на выходе блока 52 сравнения образуется положительный импульс, который сравнивается с пороговым напряжением Vnop в пороговом блоке 53. Пороговый уровень Vnop превышается только при обнаружении сложного ФМн-ЛЧМ сигнала с ППРЧ. При превышении порогового уровня Vnop в пороговом блоке 53 формируется постоянное напряжение, которое поступает на управляющий вход ключа 55, открывая его, на управляющий вход блока 45 поиска, переводя его в режим остановки, и на вход линии 54 задержки. В исходном состоянии ключ 55 всегда закрыт.
С этого момента времени просмотр заданного диапазона частот Df и поиск ФМн сигналов с ППРЧ прекращается на время регистрации и анализа обнаруженного сигнала, которое определяется временем задержки Tэ1 линии 54 задержки.
При прекращении перестройки гетеродина 46 усилителем 47 промежуточной частоты выделяется напряжение
Uпр3i (t)=Vпр2i * cos[ωnp2it+ϕki(t)-πγt2+ϕnp2i],
которое через открытый ключ 55 поступает на первые входы перемножителей 57, 58, 85 и 86. На вторые входы перемножителей 58 и 86 с выходов узкополосного фильтра 59 и фазоинвертора 89 подаются опорные напряжения соответственно:
U01i (t)=V01 * cos(ωnp2it+ϕnp2i),
U02i (t)=-V01 * cos(ωnp2it+ϕnp2i), 0≤t≤Tc,
В результате перемножения указанных сигналов образуются результирующие напряжения:
UΣ1i(t)=VHi * cosϕki(t)+VHi * cos[2ωnp2it+ϕk2(t)+2ϕ np2i],
UΣ2i(t)=-VHi * cosϕki(t)-VHi * cos[2ωnp2it+ϕk2(t)+2ϕnp2i],
где VH2=1/2Vnp2i * V01.
Аналоги моделирующего кода MΣ(t):
UH1i(t)=VHi * cosϕki(t),
UH2i(t)=-VHi * cosϕki(t),
выделяются фильтрами 60 и 88 нижних частот соответственно и подаются на два входа вычитателя 91. Вычитая одно из другого указанные напряжения с учетом их противоположной полярности, на выходе вычитателя 91 образуется удвоенное (суммарное) напряжение
UHi(t)=UH1i(t)-UH2i(t)=VHi * cosϕki(t),
т.е. получается сложение по абсолютной величине напряжений UH1i(t) и UH2i(t). При этом амплитудные аддативные помехи проходят через два демодулятора 56.1 и 56.2 одинаково, изменяя амплитуды выходных продетектированных напряжений в одну и ту же сторону. Но в вычитателе 91 они вычитаются, оставаясь однополярными, то есть подавляются, взаимно компенсируются. Низкочастотное напряжение UH2i(t) с выхода фильтра 88 нижних частот одновременно поступает на вход фазоинвертора 90, на выходе которого образуется низкочастотное напряжение
UH3i(t)=VHi * cosϕki(t).
Низкочастотные напряжения UHi(t) и UH3i(t) с выхода фильтра 60 нижних частот и фазоинвертора 90 поступают на второй вход перемножителей 57 и 85 соответственно, на выходе которых образуются гармонические напряжения:
U01i(t)=V1i * cos(ωnp2it+ϕ np2i)+V1i * cos[ωnp2it+2ϕki(t)+ϕnp2i]=
=2V1i * cos(ωnp2it+ϕnp2i)=Voi * cos(ωnp2it+ϕnp2i),
U03i(t)=V1i * cos(ωnp2it+ϕ np2i)+V1i * cos[ωnp2it+2ϕki(t)+ϕnp2i]=
=2V1i * cos(ωnp2it+ϕnp2i)=Voi * cos(ωnp2it+ϕnp2i),
где V1i=1/2 VHi * Vnp2i;
2V1i=Voi; 2ϕki(t)={0, 2π}.
Данные напряжения выделяются узкополосными фильтрами 59 и 87 соответственно. Напряжение U01i(t) с выхода узкополосного фильтра 59 подается на второй вход перемножители 58. Напряжение U03i(t) выделяется узкополосным фильтром 87 и поступает на вход фазоинвертора 89, на его выходе образуется напряжение
UO2i(t)=-VOi * cos(ωnp2it+ϕ np2i),
которое подается на второй вход перемножителя 86.
Низкочастотное напряжение UHi(t), пропорциональное моделирующему коду MΣ(t), с выхода вычитателя 91 фиксируется блоком 61 регистрации. Время задержки Т3 i линии 54 задержки выбирается таким, чтобы можно было зафиксировать и проанализировать обнаруженный сложный ФМн сигнал с ППРЧ. По истечении этого времени напряжение с выхода линии 54 задержки поступает на вход сброса порогового блока 53 и сбрасывает его содержимое на нулевое значение. При этом блок 45 поиска переводится в режим перестройки, а ключ 55 закрывается, т.е. они переводятся в свои исходные состояния. С этого момента времени просмотр заданного частотного диапазона Df и поиск ФМн-сигналов с ППРЧ продолжаются.
В случае обнаружения следующего ФМн-сигнала с ППРЧ на другой несущей частоте работа пункта контроля происходит аналогичным образом. Следовательно, пункт контроля фиксирует и анализирует дорожно-транспортные происшествия многих транспортных средств. Их идентификационными признаками являются несущая частота и модулирующий код M(t).
Предлагаемое устройство обеспечивает не только измерение скорости транспортного средства, регистрацию ее и других контролируемых параметров, характеризующих техническое состояние и функционирование транспортного средства, а также психофизиологическое состояние водителя, на «бесконечную» магнитную ленту, но и определение местоположения транспортного средства, совершившего дорожно-транспортное происшествие, и передачу указанных параметров по радиоканалу на пункт контроля с использованием сложных ФМн сигналов с ППРЧ.
При этом запись на магнитной ленте хранится в течение интервала времени, определяемого ее скоростью движения и длиной. Непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной и стирающей магнитных головок. Запись производится с непрерывным стиранием зарегистрированных параметров так, что на ленте всегда остается информация последних нескольких минут движения транспортного средства до дорожно-транспортного происшествия. Сохранение записанной информации обеспечивается контейнером («черным ящиком»), который используется при расследовании дорожно-транспортных происшествий и при других спорных случаях.
Кроме того, контролируемые параметры передаются по радиоканалу на пункт контроля с помощью сложных ФМн сигналов с ППРЧ, которые являются тревожными сигналами, свидетельствующими о дорожно-транспортном происшествии, и позволяют дистанционно расследовать дорожно-транспортные происшествия.
Сложные ФМн сигналы с ППРЧ обладают энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого используемые сложные ФМн сигналы с ППРЧ в точке приема могут оказаться замаскированными шумами. Причем энергия сложных ФМн сигналов с ППРЧ отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн сигналов с ППРЧ обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн сигналов априорно неизвестной структуры с целью повышение чувствительности приемника.
Сложные ФМн сигналы с ППРЧ открывают новые возможности в технике передачи сообщений по радиоканалам. Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять сложные ФМн сигналы с ППРЧ среди других сигналов и помех, действующих в одной и той же полосе частот и в одни и те же промежутки времени. Данная возможность реализуется сверткой спектра сложных ФМн сигналов с ППРЧ.
При этом сложные ФМн сигналы с ППРЧ обеспечивают повышение надежности и достоверности передачи сигнала бедствия, контролируемых параметров и местоположение транспортного средства на пункт контроля после совершения дорожно-транспортного происшествия в условиях организованных и непреднамеренных помех, многолучевого распространения радиоволн, характерных для больших мегаполисов, путем псевдослучайной перестройки рабочей частоты.
Рабочая частота сигнала и частоты гетеродинов перестраиваются в широких пределах в соответствии с псевдослучайными последовательностями, известными на транспортных средствах и пункте контроля и неизвестными посторонним лицам, в том числе и постановщикам помех.
Стратегия борьбы с непреднамеренными и организованными помехами в предлагаемом устройстве заключается в «уходе» сигналов симплексной системы радиосвязи от воздействия помех путем псевдослучайной перестройки рабочей частоты и в «противоборстве» с ними путем фазовой манипуляции несущей частоты псевдослучайной последовательности (ПСП). Поэтому в предлагаемом устройстве при защите от помех важной характеристикой является фактическое время работы на одной частоте. Чем меньше это время, тем выше вероятность того, что ФМн сигналы симплексной системы радиосвязи с ППРЧ не будут подтверждены воздействию организованных помех.
Помехоустойчивость предлагаемого устройства зависит не только от времени работы на одной частоте, но и от вида помехи и ее мощности, мощности полезного сигнала, структуры приемника.
Определение местоположения транспортного средства, совершившего ДТП, позволяет представителям ГИБДД быстро и своевременно прибыть на место происшествия, что особенно важно в случаях, когда водитель и пассажиры транспортного средства в результате ДТП не имеют физической возможности сообщить об этом и нуждаются в скорой медицинской помощи.
Таким образом, предлагаемое устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение достоверности и помехоустойчивости приема GPS-сигналов на транспортном средстве и сложных ФМн сигналов с псевдослучайной перестройкой рабочей частоты на пункте контроля в условиях организованных и непреднамеренных помех, многолучевого распространения радиоволн, характерных для крупных мегаполисов. Это достигается путем подавления узкополосных аддитивных помех.
Устройство контроля параметров движения транспортного средства, содержащее последовательно включенные датчик импульсов пути, первый счетчик импульсов пути, первый микропроцессор, второй вход которого через второй счетчик импульсов соединен с выходом эталонного датчика времени, а выход является первым выходом устройства, последовательно подключенные к второму выходу датчика импульсов пути, блок управления, второй вход которого соединен с выходом эталонного датчика времени, третий счетчик импульсов и второй микропроцессор, второй вход которого соединен с вторым выходом первого счетчика импульсов, а выход является вторым выходом устройства, датчик состояния тормозной системы, датчик состояния приборов сигнализации, датчик состояния фар, датчик усилия сжатия водителем рулевого колеса, распределительный блок, многоканальный усилительно-кодирующий блок, блок выбора режима работы, генератор тока стирания, датчик движения транспортного средства, стабилизатор напряжения, электродвигатель, лентопротяжный механизм, кассету с роликами и магнитной лентой, универсальную магнитную головку, стирающую магнитную головку, контрольную лампу, фазовый манипулятор, усилитель мощности, передающую антенну и пункт контроля, при этом первый и второй выходы устройства, первый и второй выходы эталонного датчика времени, выходы датчика состояния тормозной системы, датчика состояния приборов сигнализации, датчика состояния фар, датчика усилия сжатия водителем рулевого колеса через последовательно соединенные распределительный блок и многоканальный усилительно-кодирующий блок подключены к универсальной магнитной головке, второй вход многоканального усилительно-кодирующего блока соединен с первым выходом блока выбора режима работы, второй выход которого через генератор тока стирания подключен к стирающей магнитной головке, а его третий выход через последовательно соединенные стабилизатор напряжения, электродвигатель и лентопротяжный механизм подключен к контрольной лампе, управляющий вход эталонного датчика времени соединен с первым выходом датчика движения транспортного средства, второй выход которого соединен с вторым выходом стабилизатора напряжения, к второму выходу многоканального усилительно-кодирующего блока подключен блок декодирования, при этом к выходу второй приемной антенны последовательно подключены приемник GPS-сигналов, третий перемножитель, второй вход которого соединен с выходом второго фильтра нижних частот, второй узкополосный фильтр, четвертый перемножитель, второй вход которого соединен с выходом приемника GPS-сигналов, и второй фильтр нижних частот, к выходу второй линии задержки последовательно подключены сумматор, второй вход которого соединен с вторым выходом многоканального усилительно-кодирующего блока, фазовый манипулятор, второй смеситель, второй вход которого через синтезатор частот второго гетеродина соединен с выходом первого генератора псевдослучайной последовательности, усилитель первой промежуточной частоты, усилитель мощности и передающая антенна, к выходу первого синхронизатора последовательно подключены первый генератор псевдослучайной последовательности и синтезатор несущих частот, второй вход которого соединен с вторым выходом блока выбора режима, а выход подключен к второму входу фазового манипулятора, пункт контроля выполнен в виде последовательно включенных первой приемной антенны, усилителя высокой частоты, первого смесителя, усилителя второй промежуточной частоты, удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом усилителя второй промежуточной частоты, порогового блока, второй вход которого через первую линию задержки соединен с его выходом, ключа, второй вход которого соединен с выходом усилителя второй промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом первого фильтра нижних частот, первого узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом ключа, и первого фильтра нижних частот, последовательно подключенных к выходу второго синхронизатора второго генератора псевдослучайной последовательности и синтезатор частот первого гетеродина, второй вход которого через блок поиска соединен с выходом порогового блока, а выход подключен к второму входу первого смесителя, а также блока регистрации, отличающееся тем, что оно снабжено пятым, шестым, седьмым и восьмым перемножителями, третьим и четвертым узкополосными фильтрами, третьим и четвертым фильтрами нижних частот, четырьмя фазоинверторами и двумя вычитателями, причем к выходу приемника GPS-сигналов последовательно подключены пятый перемножитель, второй вход которого соединен с выходом второго фазоинвертора, третий узкополосный фильтр, первый фазоинвертор, шестой перемножитель, второй вход которого соединен с выходом приемника GPS-сигналов, третий фильтр нижних частот и второй фазоинвертор, вход второй линии задержки через первый вычитатель соединен с выходами второго и третьего фильтров нижних частот, к выходу ключа последовательно подключены седьмой перемножитель, второй вход которого соединен с выходом четвертого фазоинвертора, четвертый узкополосный фильтр, третий фазоинвертор, восьмой перемножитель, второй вход которого соединен с выходом ключа, четвертый фильтр нижних частот и четвертый фазоинвертор, вход блока регистрации через второй вычитатель соединен с выходами первого и четвертого фильтров нижних частот.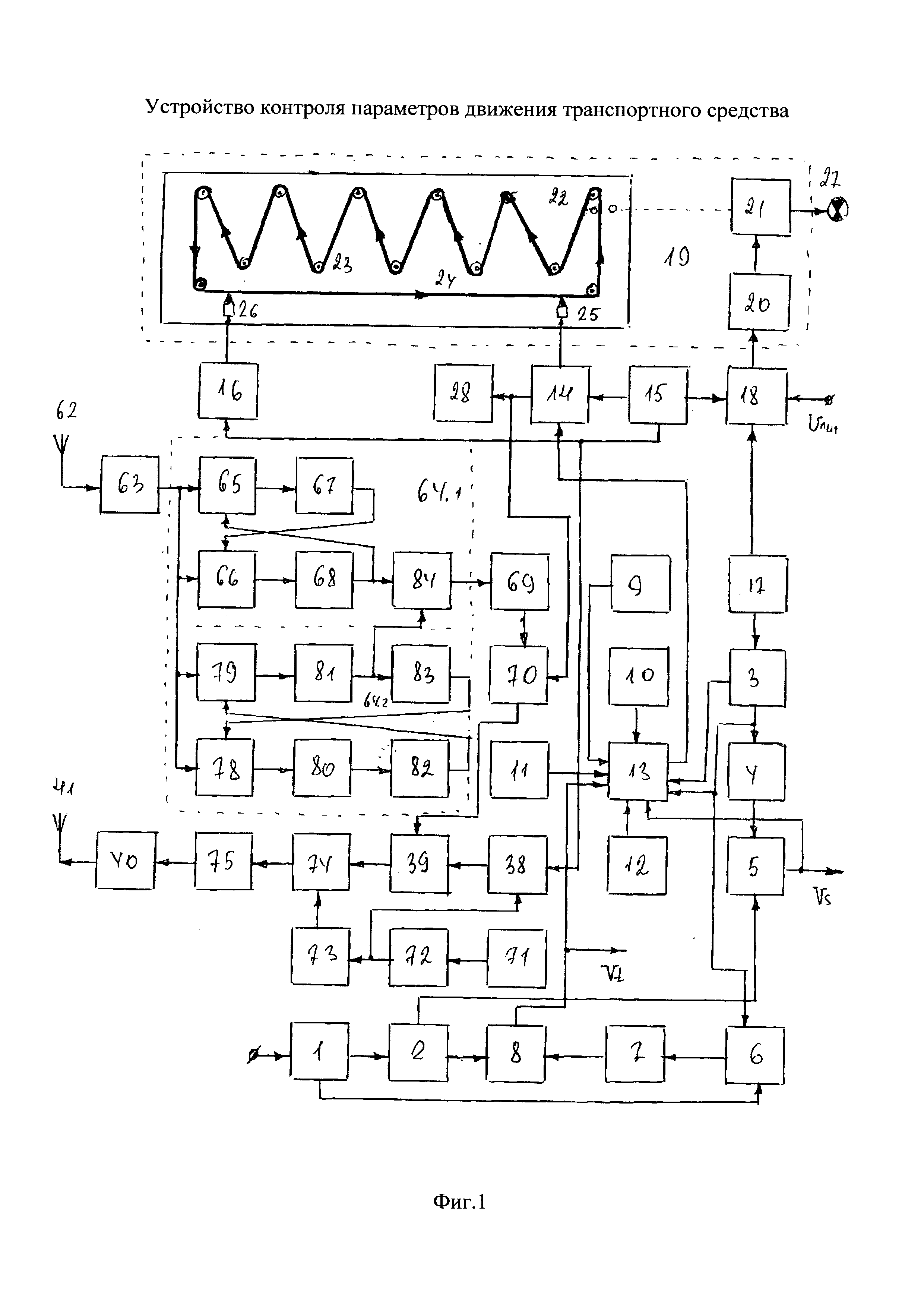
Аналитическая система оценки потребления воды абонентами
Специальное фортификационное сооружение
Защитная композиция для обеспечения защиты гидравлических приводов тормозных систем от коррозии
Система радиочастотной идентификации объектов военного назначения
Система разведки наземных объектов и целеуказания
Территориальная система контроля транспортировки особо важных и опасных грузов
Воздухораспределитель
Автономный фундамент
Контейнер для транспортирования горючего
Способ идентификации субъекта на обслуживаемом объекте и устройство для его осуществления
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Система охраны и наблюдения
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Способ управления самолетом при заходе на посадку
Радиоприемное устройство для обнаружения широкополосных сигналов с фазовой манипуляцией

