Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к управляемым электрическим двигателям, в частности к классу вентильных двигателей (бесколлекторных двигателей постоянного тока - БДПТ) и может найти применение вместо коллекторного двигателя постоянного тока, например, в следящих системах автоматического управления и регулирования.
Известны способы управления вентильным двигателем, основанные на преобразовании угла поворота вала синхронного двигателя в трехфазный электрический сигнал датчика положения ротора двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания двигателя, среднее значение которого изменяется по синусоидальному закону [В.А. Головацкий и др. Устройство управления бесколлекторным двигателем постоянного тока на силовых схемах. В кн. Электронная техника в автоматике. Сборник статей под ред. Ю.И. Конева. Выпуск 4. М., 1973, стр. 34-37].
Такой способ управления позволяет получить плавное и широкое регулирование скорости вентильного двигателя, малые пульсации момента и высокий к.п.д. Однако статические и динамические характеристики вентильного двигателя при таком способе управления существенно отличаются от характеристик коллекторного двигателя постоянного тока [В.Н. Крывой и др. Бесконтактные электродвигатели постоянного тока. Информэлектро. М., 1970, стр. 5-8], что является недостатком известного способа. Кроме того, скорость вращения вентильного двигателя отрабатывается при таком способе управления не оптимально по точности.
Из известных способов управления вентильным двигателем наиболее близким по технической сущности является способ, который выбран в качестве прототипа для заявляемого способа. Данный способ основан на преобразовании угла поворота вала синхронного двигателя в трехфазный электрический сигнал датчика положения ротора двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания двигателя, среднее значение которого изменяется по синусоидальному закону, трехфазное напряжение питания формируют из знака разности сигнала трехфазного датчика положения ротора синхронного двигателя и сигнала трехфазного датчика тока синхронного двигателя, причем сигнал управления формируют из разности сигнала задания по скорости и сигнала обратной связи по скорости [Сухинин Б.В. Сурков В.В., Егоров А.Ю., Сурков А.В., Домнин А.Н. Способ управления вентильным двигателем и следящая система для его осуществления. Патент №2404504 на изобретение. Зарегистрирован 20.11.2010. Бюл. №32].
Такой способ управления позволяет получить характеристики вентильного двигателя, аналогичные характеристикам коллекторного двигателя постоянного тока, причем скорость вращения вентильного двигателя отрабатывается при этом оптимально по точности при нулевом моменте нагрузки. Однако при любом другом моменте нагрузки, не равном нулю, скорость вращения вентильного двигателя отрабатывается не оптимально по точности, причем, чем больше момент нагрузки, тем больше величина ошибки.
Известны схемы вентильных двигателей, содержащие трехфазный синхронный двигатель, подключенный к выходу трехфазного преобразователя, среднее значение выходного напряжения которого изменяется по синусоидальному закону, трехфазный датчик положения ротора синхронного двигателя, обмотка возбуждения которого соединена с выходом модулятора, на вход модулятора подается напряжение управления, выход трехфазного датчика положения ротора подключен к входу трехфазного демодулятора, а выход трехфазного демодулятора соединен с входом преобразователя [В.А. Головацкий и др. Устройство управления бесколлекторным двигателем постоянного тока на силовых схемах. В кн. Электронная техника в автоматике. Сборник статей под ред. Ю.И. Конева. Выпуск 4. М, 1973, стр. 34-37].
Такой вентильный двигатель не позволяет получить статические и динамические характеристики, как у коллекторного двигателя постоянного тока [В.Н. Крывой и др. Бесконтактные электродвигатели постоянного тока. Информэлектро. М., 1970, стр. 5-8], что является недостатком известного вентильного двигателя. Кроме того, скорость вращения вентильного двигателя отрабатывается схемой не оптимально по точности.
Из известных вентильных двигателей наиболее близким по технической сущности является вентильный двигатель, который взят в качестве прототипа для заявляемого устройства. Данный вентильный двигатель содержит последовательно соединенные сумматор, модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, первый суммирующий вход трехфазного сумматора, трехфазное реле, трехфазный преобразователь, трехфазный датчик тока синхронного двигателя и трехфазный синхронный двигатель, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя и с валом датчика скорости синхронного двигателя, второй вычитающий вход трехфазного сумматора соединен с выходом трехфазного датчика тока синхронного двигателя, выход датчика скорости синхронного двигателя соединен с вычитающим входом сумматора [Сухинин Б.В. Сурков В.В., Егоров А.Ю., Сурков В.А., Домнин А.Н. Способ управления вентильным двигателем и следящая система для его осуществления. Патент №2404504 на изобретение. Зарегистрирован 20.11.2010. Бюл. №32].
Технической задачей настоящей группы изобретений является получение оптимальной по точности скорости вращения вентильного двигателя, инвариантной (не зависящей) от изменяющегося момента нагрузки, путем аналитического конструирования оптимальных по точности регулятора скорости вращения вентильного двигателя и подчиненного ему регулятора тока вентильного двигателя.
Данная задача решается тем, что в известном способе управления вентильным двигателем, основанным на преобразовании угла поворота вала синхронного двигателя в трехфазный электрический сигнал датчика положения ротора двигателя, амплитуда которого пропорциональна сигналу управления, и формировании трехфазного напряжения питания двигателя, среднее значение которого изменяется по синусоидальному закону, трехфазное напряжение питания формируют из знака разности сигнала трехфазного датчика положения ротора синхронного двигателя и сигнала трехфазного датчика тока синхронного двигателя, причем релейный сигнал управления формируют из разности сигнала задания по скорости, сигнала обратной связи по скорости и сигнала обратной связи по ускорению.
Данный способ может быть использован в любой следящей системе с вентильным двигателем вместо коллекторного двигателя постоянного тока.
Для пояснения способа воспользуемся уравнениями Горева-Парка в координатах d,q [А.А. Горев. Переходные процессы синхронной машины. М.: ГЭИ, 1950] для синхронного двигателя при токе возбуждения If=const: 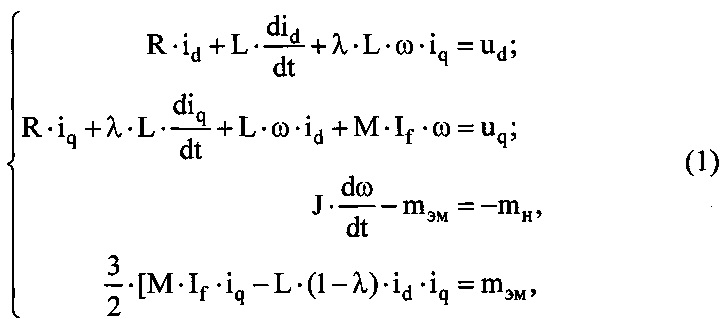
где υ - угол поворота ротора синхронного двигателя,  ,
,
ρ=120° - угол сдвига осей фазных обмоток двигателя относительно друг друга,
R - активное сопротивление обмотки статора двигателя,
L - коэффициент индукции по продольной оси двигателя,
λ - коэффициент явнополюсности,
J - момент инерции вращающихся масс,
ω - скорость вращения ротора синхронного двигателя;
М - коэффициент взаимоиндукции между обмоткой статора и ротора,
mэм - электромагнитный момент вращения вала двигателя,
mн - момент нагрузки на валу двигателя.
Из уравнений (1) следует, что синхронный двигатель представляет собой объект регулирования с двумя управляющими воздействиями: ud и uq.
Проведем вначале синтез двух каналов d и q регулятора тока id и iq.
Воспользовавшись теорией аналитического конструирования регуляторов А.А. Красовского [Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973, - 558 с.] или более простой в использовании, изложенной в [В.В. Сурков, Б.В. Сухинин и др. Аналитическое конструирование оптимальных регуляторов по критериям точности, быстродействию, энергосбережению. - Тула: Изд-во ТулГУ, 2005, - 300 с.], запишем оптимальный по точности и одновременно оптимальный по быстродействию закон управления для регулятора тока id и iq:


где Um - напряжение питания преобразователя,
idзад, iqзад или, udзад, uqзад - заданные значения сигналов управления для регулятора тока id и iq соответственно;
k - коэффициент пропорциональности, k>0.
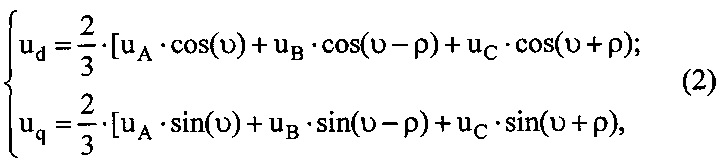
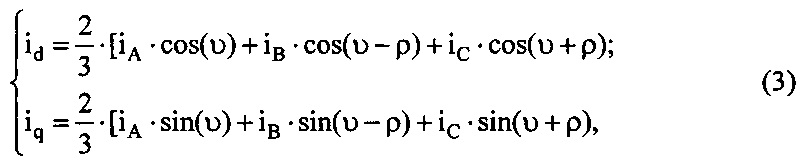
Переменные в координатах d,q выражаются через переменные в реальных координатах А, В, С посредством соотношений (2), (3). Например, фиктивным токам id, iq соответствуют реальные фазные токи iA, iB iC.
Воспользовавшись соотношениями (2), (3), найдем, что разностям udзад-k⋅id и и uqзад-k⋅iq соответствуют разности uAзад-k⋅iA, uBзад-k⋅iB, uСзад-k⋅iC каждой фазы двигателя и оптимальным управлениям (4), (5) в координатах d,q соответствуют фазные управления



Здесь

Предлагаемый трехфазный регулятор тока реализуется в следящей системе с вентильным двигателем, содержащей последовательно соединенные модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, первый суммирующий вход трехфазного сумматора, трехфазное реле, трехфазный преобразователь, трехфазный датчик тока синхронного двигателя и трехфазный синхронный двигатель, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя, второй вычитающий вход трехфазного сумматора соединен с выходом трехфазного датчика тока синхронного двигателя, на вход модулятора поступает сигнал управления по току [Сухинин Б.В. Сурков В.В., Егоров А.Ю., Домнин А.Н., Сурков А.В. Способ управления вентильным двигателем и следящая система для его осуществления. Патент №2354036 на изобретение. Зарегистрирован 27.04.2009. Бюл. №12].
Трехфазный регулятор тока (фиг.1) работает следующим образом.
Напряжение задания uвх (сигнал управления по току) преобразуется модулятором 4 в напряжение прямоугольной формы повышенной частоты (500-20000 Гц) с амплитудным значением, равным uвх, и подается на обмотку возбуждения датчика положения ротора синхронного двигателя 5, например сельсина, ротор которого механически соединен с ротором синхронного двигателя. Сигнал с обмоток синхронизации сельсина подается на трехфазный демодулятор 6, на выходе которого появляется напряжение задания на оптимальный регулятор:
где k1 - общий коэффициент преобразования модулятора, датчика положения ротора синхронного двигателя и демодулятора, k1=1;
υ - угол поворота ротора синхронного двигателя,  ;
;
θ - угол установки датчика положения ротора синхронного двигателя относительно ротора синхронного двигателя.
Посредством трехфазного сумматора 7 из трехфазного напряжения (10) с выхода демодулятора вычитается трехфазное напряжение, получаемое от трехфазного датчика тока 10, и подается на вход трехфазного реле 8, выходной сигнал которого подается на вход трехфазного преобразователя 9, на выходе трехфазного преобразователя 9 появляется трехфазное напряжение uA, uB, uC, изменяющееся в соответствии с оптимальным законом управления (6)-(9). В качестве трехфазного преобразователя в схеме используется, например, трехфазный мост из шести транзисторов (тиристоров), которые работают в ключевом режиме.
Воспользовавшись соотношениями (2) и (10), найдем udзад и uqзад регулятора токов (4) и (5), соответствующие заданиям (10):


При этом оптимальные управления (4), (5) примут вид:


Из (13) следует, что при установке датчика положения ротора в нулевое положение (θ=0):


регулятор тока канала d стабилизирует ток id на нулевом уровне оптимально по быстродействию и поддерживает его оптимально по точности так, что id=0. При этом уравнения (6) - (8) с учетом (9), (10) при θ=0 приводятся к виду:
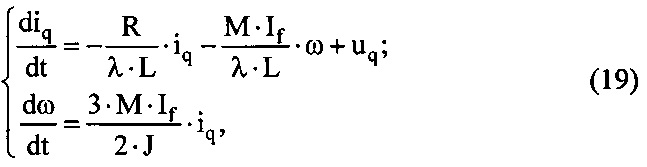
Уравнения (1) с учетом (15), (16) при θ=0 и k1=1 преобразуются к виду дифференциальных уравнений в форме Коши:
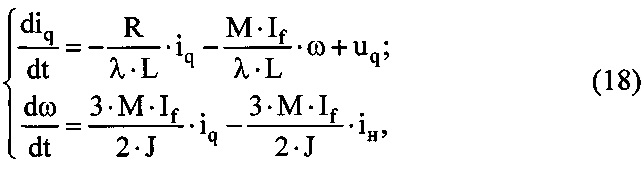
где 
Полученные уравнения (18) полностью аналогичны дифференциальным уравнениям коллекторного двигателя постоянного тока. Следовательно, и статические и динамические характеристики вентильного двигателя с данным регулятором тока полностью аналогичны статическим и динамическим характеристикам коллекторного двигателя постоянного тока.
В соответствии с концепцией A.M. Ляпунова о возмущенно-невозмущенном движении [см., например, Б.В. Сухинин, Е.Т. Евстигнеев. Синтез электрических следящих приводов, оптимальных по точности: Учеб. пособие. Тул. политехн, ин-т. Тула, - 1992., с. 5-13], запишем уравнения системы (18) в отклонениях:
где вместо iq в последнем уравнении необходимо записать Δiq=iq-iн, т.е. ток нагрузки iн или соответствующий ему момент нагрузки mн выступает в качестве задания для тока iq или соответствующего ему электромагнитного момента mэм.
Проведем затем синтез регулятора скорости ω. Воспользовавшись теорией аналитического конструирования регуляторов [В.В. Сурков, Б.В. Сухинин и др. Аналитическое конструирование оптимальных регуляторов по критериям точности, быстродействию, энергосбережению. - Тула: Изд-во ТулГУ, 2005. - 300 с], запишем оптимальный по точности закон управления скоростью со, используя уравнения (19):

где 
Um - напряжение питания преобразователя,
ωзад или uωзад=k2⋅ωзад - заданное значение сигнала управления для регулятора скорости;
k2 - коэффициент пропорциональности, k2>0, [k2]=В⋅с.
Подставляя (21) в (20), получим управление в отклонениях для регулятора скорости:

где вместо iq необходимо записать Δiq=iq-iн:

С учетом последнего выражения для оптимального по точности регулятора скорости (23) необходимо иметь датчик тока нагрузки iн или соответствующего ему момента нагрузки mн. С целью исключения датчика момента нагрузки, выразим ток iq из второго уравнения системы (19) и подставим его в управление (23):

где 
Из формул регулятора скорости (23) и регулятора тока (4)-(5) следует, что рассматриваемый способ требует двух подчиненно работающих регуляторов: регулятора скорости и регулятора тока, подчиненного регулятору скорости.
Предлагаемый способ реализуется в следящей системе с вентильным двигателем, содержащей последовательно соединенные первый сумматор, модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, трехфазный сумматор, трехфазное реле, трехфазный преобразователь, трехфазный датчик тока синхронного двигателя, ротор которого механически соединен с валом синхронного двигателя и с валом датчика скорости синхронного двигателя, вычитающий вход первого сумматора соединен с выходом датчика скорости синхронного двигателя. В следящую систему дополнительно введены наблюдатель, вычисляющий производную входного сигнала, второй сумматор и реле, выход которого соединен с входом модулятора, вход реле соединен с выходом второго сумматора, вход наблюдателя соединен с выходом датчика скорости синхронного двигателя, выход наблюдателя соединен с вычитающим входом второго сумматора, а суммирующий вход первого сумматора является входом управления вентильного двигателя по скорости.
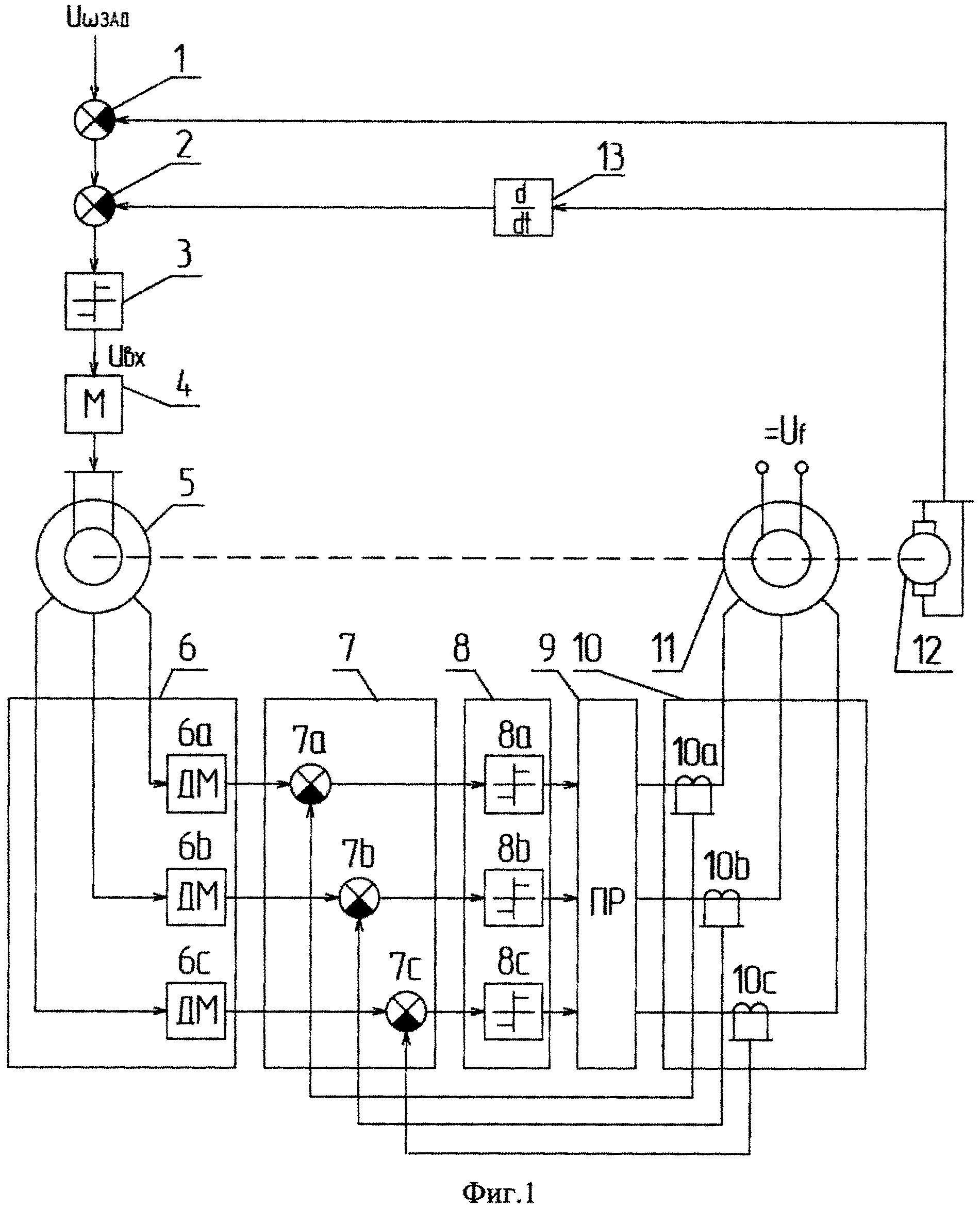
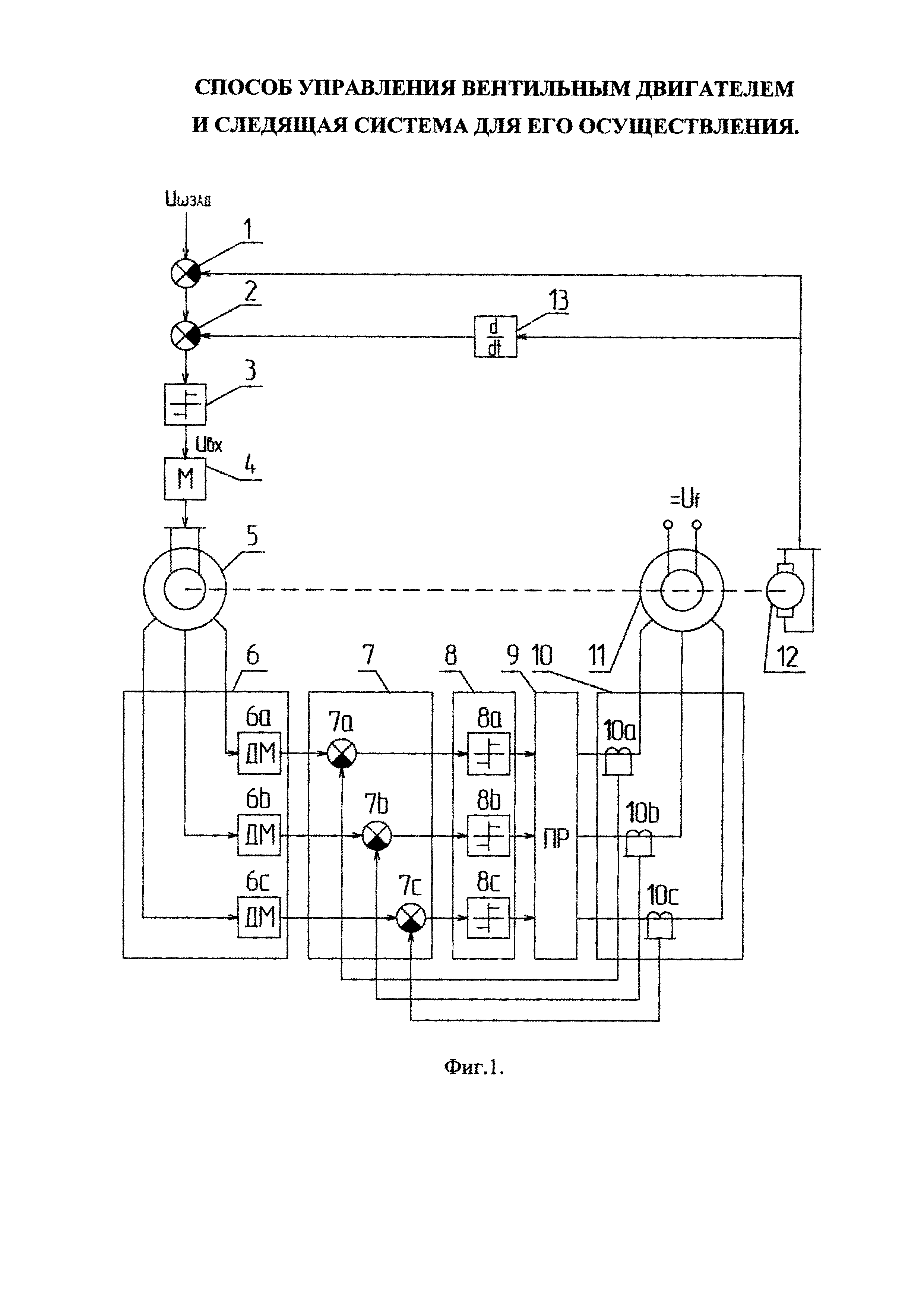
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема следящей системы, реализующей способ оптимального по точности управления скоростью вентильного двигателя.
Система содержит последовательно соединенные сумматор 1, сумматор 2, реле 3, модулятор 4, трехфазный датчик положения ротора синхронного двигателя 5, трехфазный демодулятор 6, первый суммирующий вход трехфазного сумматора 7, трехфазное реле 8, трехфазный преобразователь 9, трехфазный датчик тока синхронного двигателя 10 и трехфазный синхронный двигатель 11, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя 5 и с валом датчика скорости синхронного двигателя 12, второй вычитающий вход трехфазного сумматора 7 соединен с выходом трехфазного датчика тока синхронного двигателя 10, выход датчика скорости синхронного двигателя 12 соединен с вычитающим входом сумматора 1 и одновременно со входом наблюдающего устройства 13, выход которого соединен с вычитающим входом сумматора 2.
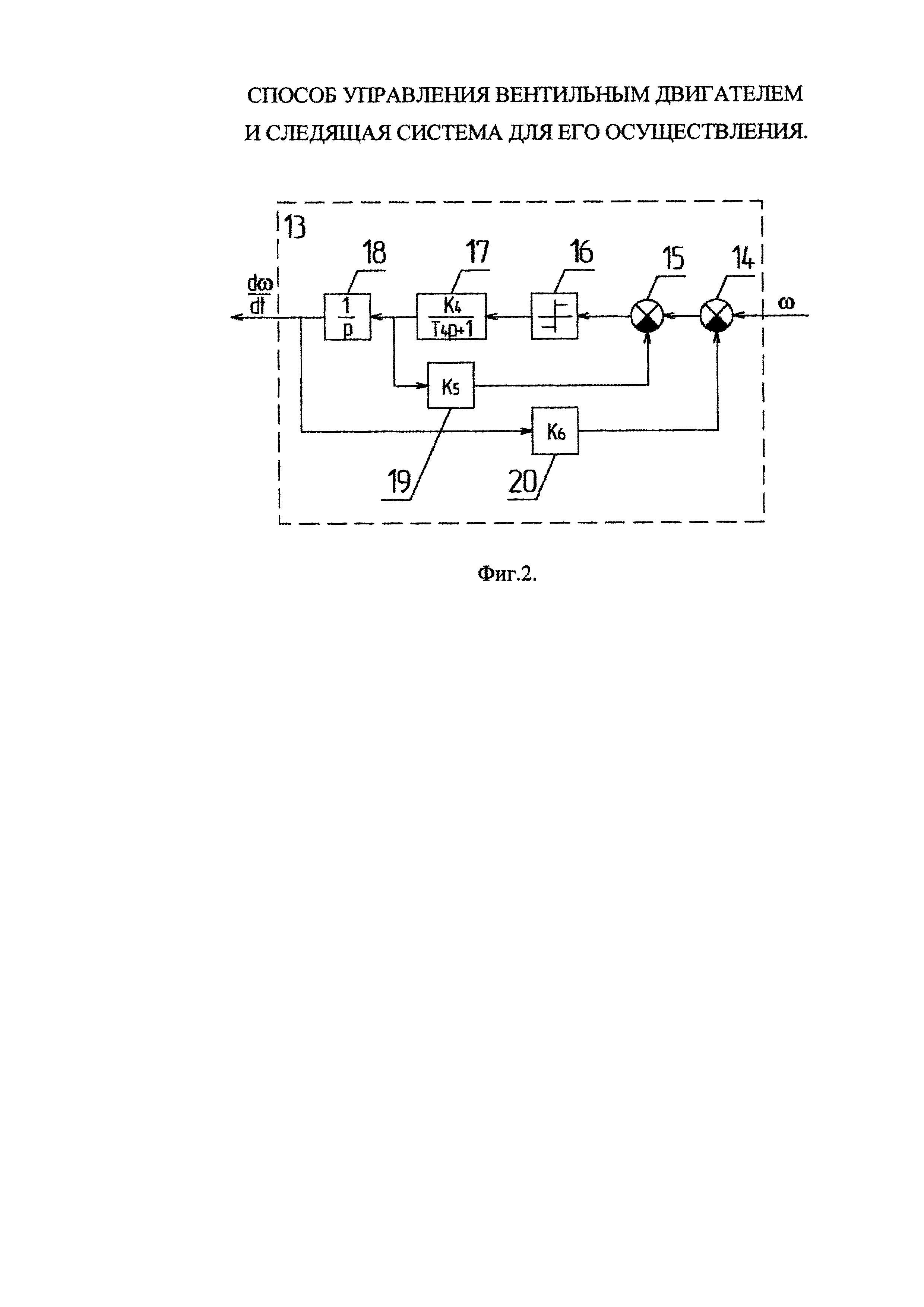
На фиг. 2 представлена структурная схема наблюдающего устройства для вычисления производной входного сигнала (производной скорости вентильного двигателя).
Структурная схема наблюдающего устройства содержит последовательно соединенные сумматор 14, сумматор 15, реле 16, апериодическое звено первого порядка 17, интегрирующее звено 18, выход которого соединен со входом пропорционального звена 20, выход пропорционального звена 20 соединен с вычитающим входом сумматора 14, выход апериодического звена первого порядка 17 соединен со входом пропорционального звена 19, выход пропорционального звена 19 соединен с вычитающим входом сумматора 15.
Система работает следующим образом.
Напряжение задания по скорости uωзад (сигнал управления) подается на суммирующий вход сумматора 1, посредством которого из сигнала uωзал вычитается напряжение, пропорциональное скорости вращения датчика скорости синхронного двигателя 12, например тахогенератора, ротор которого механически соединен с ротором синхронного двигателя. Выходное напряжение сумматора 1 подается на суммирующий вход сумматора 2, а на вычитающий вход сумматора 2 подается напряжение пропорциональное производной скорости вращения датчика скорости 12 синхронного двигателя. Вычисление производной скорости осуществляется, например, с помощью наблюдающего устройства, синтезированного методом аналитического конструирования регуляторов. Постоянная времени Т4 и постоянные коэффициенты пропорциональности К4, К5, К6 определяются по методике [см., например, Б.В. Сухинин, Е.Т. Евстигнеев. Синтез электрических следящих приводов, оптимальных по точности: Учеб. пособие. Тул. политехн, ин-т. Тула, - 1992, с. 50-52]. В структурной схеме наблюдающего устройства входной сигнал скорости подается на суммирующий вход сумматора 14, посредством которого из входного сигнала вычитается выходной сигнал наблюдающего устройства, пропорциональный производной скорости вращения 18. Выходной сигнал сумматора 14 подается на суммирующий вход сумматора 15, а на вычитающий вход сумматора 15 подается сигнал, пропорциональный выходному сигналу апериодического звена первого порядка 17.
Выходное напряжение сумматора 2 подается на реле 3 и на выходе реле 3 появляется напряжение:

которое подается на трехфазный регулятор тока: преобразуется модулятором 4 в напряжение прямоугольной формы повышенной частоты (500-20000 Гц) с амплитудным значением, равным uвх и подается на обмотку возбуждения датчика положения ротора синхронного двигателя 5, например сельсина, ротор которого механически соединен с ротором синхронного двигателя. Сигнал с обмоток синхронизации сельсина подается на трехфазный демодулятор 6, на выходе которого появляется напряжение задания на оптимальный регулятор (10). Посредством трехфазного сумматора 7 из трехфазного напряжения (10) с выхода демодулятора вычитается трехфазное напряжение, получаемое от трехфазного датчика тока 10, и подается на вход трехфазного реле 8, выходной сигнал которого подается на вход трехфазного преобразователя 9, на выходе трехфазного преобразователя 9 появляется трехфазное напряжение uA, uB, uC, изменяющееся в соответствии с оптимальным законом подчиненного управления (17), (24): закон оптимального управления трехфазным током двигателя (17) подчинен закону оптимального управления скоростью двигателя (24).
Таким образом, во-первых, статические и динамические характеристики при управлении вентильным двигателем по предлагаемому способу полностью аналогичны статическим и динамическим характеристикам коллекторного двигателя постоянного тока. Во-вторых, при таком способе управления вентильным двигателем он приобретает дополнительно свойства оптимального по точности отработки скорости вращения при случайно изменяющемся моменте нагрузки, не превышающем максимальный момент вращения двигателя.
Точность работы современных систем автоматического регулирования обычно ограничивается ошибкой системы. Предлагаемый способ позволяет получить оптимальную по точности скорость вращения вентильного двигателя инвариантную (не зависящую) от изменяющегося момента нагрузки и свести ошибку систем автоматического регулирования к нулю (теоретически). Это повышает эффективность работы систем автоматического регулирования и расширяет их функциональные возможности.
Щековая дробилка
Способ получения графеносодержащих суспензий эксфолиацией графита
Устройство для разгрузки кускового материала из бункера
Штамп для полугорячего выдавливания длинномерных труб с вырубкой из пресс-остатка
Устройство для разгрузки кускового материала из бункера
Установка для динамических испытаний плоских образцов материалов на растяжение
Устройство для измерения ускорений
Двухосный индикаторный гиростабилизатор
Устройство для измерения ускорений
Акселерометр
Способ управления вентильным двигателем и следящая система для его осуществления
Способ управления вентильным двигателем и следящая система для его осуществления

