Результат интеллектуальной деятельности: Манипулятор-трипод промышленного назначения
Вид РИД
Изобретение
Изобретение относится к машиностроению, в частности к робототехнике, а именно к манипуляторам, используемым в производственных линиях для выполнения технологических операций, связанных с сортировкой, укладкой и упаковкой продукции, применяемой в пищевой, химической промышленностях и прочих отраслях народного хозяйства.
Известен также кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрены два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания (патент РФ №2053191, опубл. 1996).
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрены два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания, при этом вершина основания, противолежащая упомянутой стороне основания, снабжена горизонтальной балкой, параллельной этой стороне основания, гидроцилиндры поворота основания расположены параллельно друг другу, их штоки закреплены на вершинах основания, соединенных между собой верхней его стороной, при этом между горизонтальной балкой и наклонными сторонами основания расположены укосины, при этом упомянутая горизонтальная балка соединена с фермой, установленной на вертикальных стойках, охватывающих кабину и закрепленных на раме транспортного средства (Патент РФ №2207317, опубл. 2003).
Известен грузоподъемный кран, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы, на котором с помощью шарниров закреплены три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, для поворота основания предусмотрен дополнительный гидроцилиндр (Патент РФ №594021, опубл. 1978).
К недостаткам известных технических решений следует отнести: недостаточные функциональные возможности грузозахватного органа из-за ограниченной степени подвижности с одной вращательной кинематической парой 5-го класса, отсутствие возможности управления грузозахватным органом; нерациональная загрузка гидроцилиндров из-за их расположения в различных плоскостях; необходимо много времени на выполнение технологической операции, возникновение опасности утечки масла при разрушении гидросистемы.
Технический результат - повышение скорости выполнения технологической операции, увеличение функциональных возможностей, возможность точнее позиционировать.
Указанный технический результат достигается манипулятором-триподом промышленного назначения, содержащим основание, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, согласно изобретению исполнительные звенья выполнены в виде линейных приводов, каждый из которых соединяется между собой и с двухстепенным управляемым захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев в виде полусфер и грузозахватным органом, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, оси симметрии звеньев двухстепенного управляемого захвата перпендикулярны друг другу, а ось симметрии пятиподвижного сферического шарнира совпадает с одной из осей двухстепенного управляемого захвата, каждое звено имеет жесткое крепление с шаговым двигателем, основание выполнено в виде равностороннего треугольника, на котором установлены датчики технического зрения.
Изобретение поясняется чертежами.
На фиг. 1 изображен общий вид манипулятора-трипода промышленного назначения.
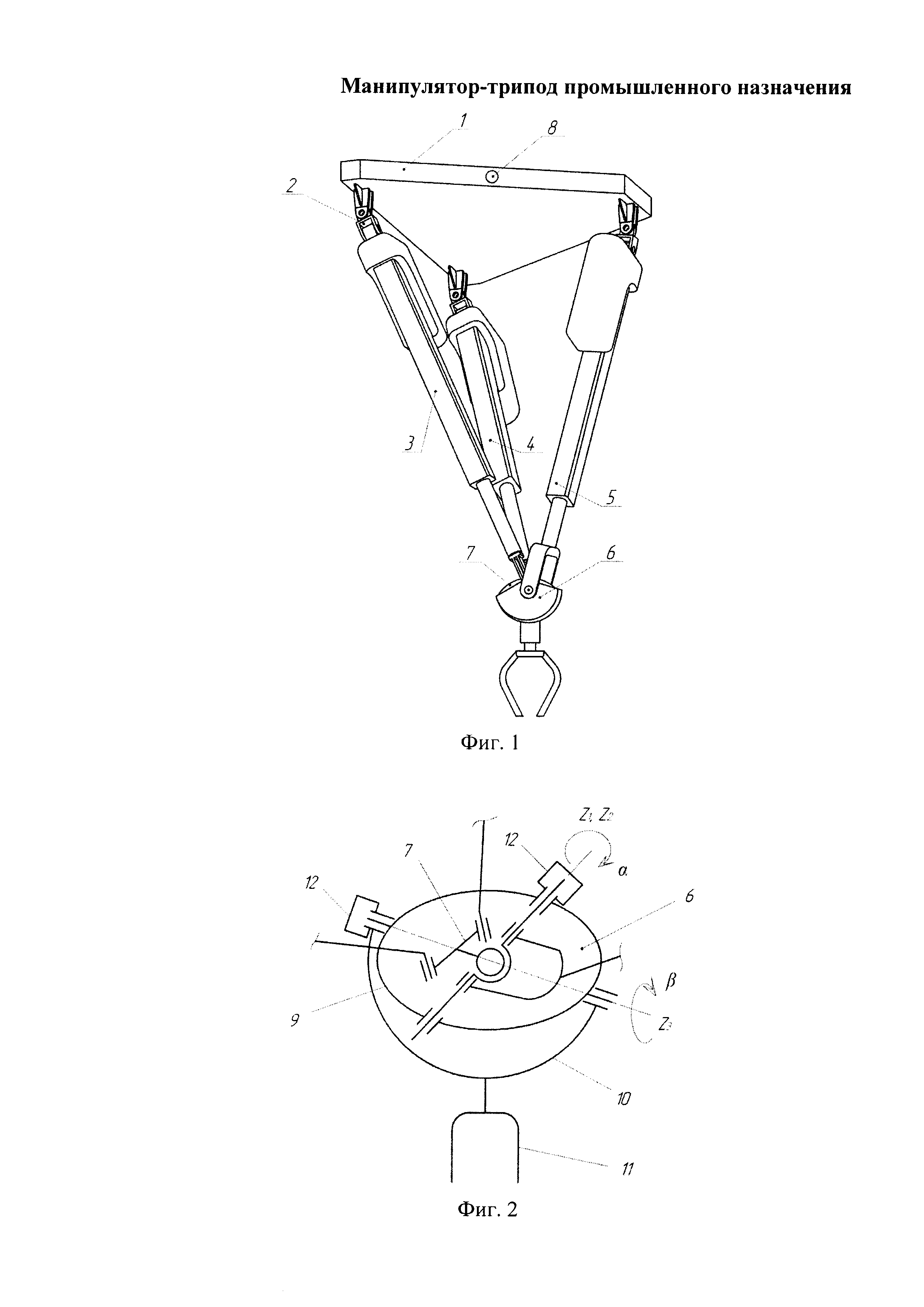
На фиг. 2 - кинематическая схема двухстепенного управляемого захвата.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Предлагаемый манипулятор-трипод промышленного назначения состоит из пространственного приводного трехстержневого механизма в виде треугольной пирамиды со звеньями переменной длины. Механизм содержит основание 1, выполненное в виде равностороннего треугольника, в вершинах которого с помощью шарниров 2 закреплены концы трех линейных приводов 3-5 с одной стороны (фиг. 1). Штоки противоположных концов трех линейных приводов 3-5 соединены между собой и с двухстепенным управляемым захватом 6 посредством пятиподвижного сферического шарнира 7. На сторонах равностороннего треугольника конструкции основания 1 установлены датчики технического зрения 8 таким образом, чтобы манипулятор мог распознать и определить координаты объекта манипулирования.
Двухстепенной управляемый захват 6 (фиг. 2) содержит два независимых звена 9 и 10 в виде полусфер и грузозахватный орган 11, расположенных последовательно друг за другом, при этом звенья 9 и 10 соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса. При этом ось симметрии Z1 пятиподвижного сферического шарнира 7 совпадает с осью симметрии Z2 звена 9 двухстепенного управляемого захвата 6, а ось Z3 звена 10 располагается под углом 90° к осям симметрии Z1 пятиподвижного сферического шарнира 7 и Z2 звена 9. Грузозахватный орган 11 жестко смонтирован на звене 10. Для вращения двух звеньев 9 и 10 предусмотрены шаговые двигатели 12, которые жестко крепятся корпусами или выходными валами к конструкциям звеньев 9 и 10.
Работа манипулятора-трипода промышленного назначения осуществляется следующим образом.
Датчики технического зрения 8, установленные на основании 1, распознают объект манипулирования и определяют его координаты расположения, далее блок управления отдает команды манипулятору-триподу на перемещения объекта.
Основную работу по перемещению грузозахватного органа 11 по траектории в заданную точку позиционирования выполняет пространственный трехстержневой механизм, представленный в виде пирамиды, который первоначально располагает двухстепенным управляемым захватом 6 непосредственно над указанным объектом. Дальнейшие манипуляции проделываются с помощью двухстепенного управляемого захвата 6, который ориентирует (разворачивает) грузозахватный орган 11 посредством двух независимых последовательно расположенных звеньев 9 и 10.
Изменение длины штока хотя бы одного линейного привода 3, 4 или 5 пространственного стержневого механизма способствует изменению геометрии всей пространственной структуры, представленной в виде пирамиды, образованной основанием 1 и звеньями переменной длины механизмов 3-5. Шарниры 2 обеспечивают необходимую двухстепенную подвижность звеньев 3-5 относительно основания 1. Вследствие изменения геометрии пространственной структуры манипулятора-трипода перемещается сферический пятиподвижный шарнир 7, который уводит за собой двухстепенной управляемый захват 6 и грузозахватный орган 11. Таким образом, максимальное перемещение грузозахватного органа 11 выполняет параллельно-пространственная структура манипулятора-трипода. Дальнейшее регулирование оптимального положения грузозахватного органа 11 в пространстве осуществляется под управлением независимых звеньев 9 и 10 двухстепенного подвижного управляемого захвата 6. На каждом из звеньев 9 или 10 установлено по одному шаговому двигателю 12, которые жестко крепятся к конструкциям звеньев 9 и 10 корпусами или выходными валами двигателя. При включении какого-либо шагового двигателя 12, конструкция любого из звеньев 9 и 10 управляемого захвата 6 начинает поворачиваться на определенный угол относительно своей оси симметрии. При этом конструкция звена 9 поворачивается на угол α вокруг оси Z2, а конструкция звена 10 на угол β - вокруг оси Z3. Повороты углов α и β ограничены из-за размеров конструкций звеньев 9 и 10, выполненных в виде полусфер. После того как грузозахватный орган 11 полностью с ориентируется в нужное положение происходит заключительный этап - захват и перенос указанного объекта в другое место.
Таким образом, манипулятор-трипод промышленного назначения, обладая линейными приводами, дополнительными степенями подвижности в конструкции грузозахватного органа, датчиками технического зрения позволяет повысить скорость выполнения технологической операции с высокой точностью позиционирования грузозахватного органа, а также увеличить функциональные возможности манипулятора-трипода.
Манипулятор-трипод промышленного назначения, содержащий основание, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, отличающийся тем, что исполнительные звенья выполнены в виде линейных приводов, каждый из которых соединяется между собой и с двухстепенным управляемым захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев в виде полусфер и грузозахватным органом, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, оси симметрии звеньев двухстепенного управляемого захвата перпендикулярны друг другу, а ось симметрии пятиподвижного сферического шарнира совпадает с одной из осей двухстепенного управляемого захвата, каждое звено имеет жесткое крепление с шаговым двигателем, основание выполнено в виде равностороннего треугольника, на котором установлены датчики технического зрения.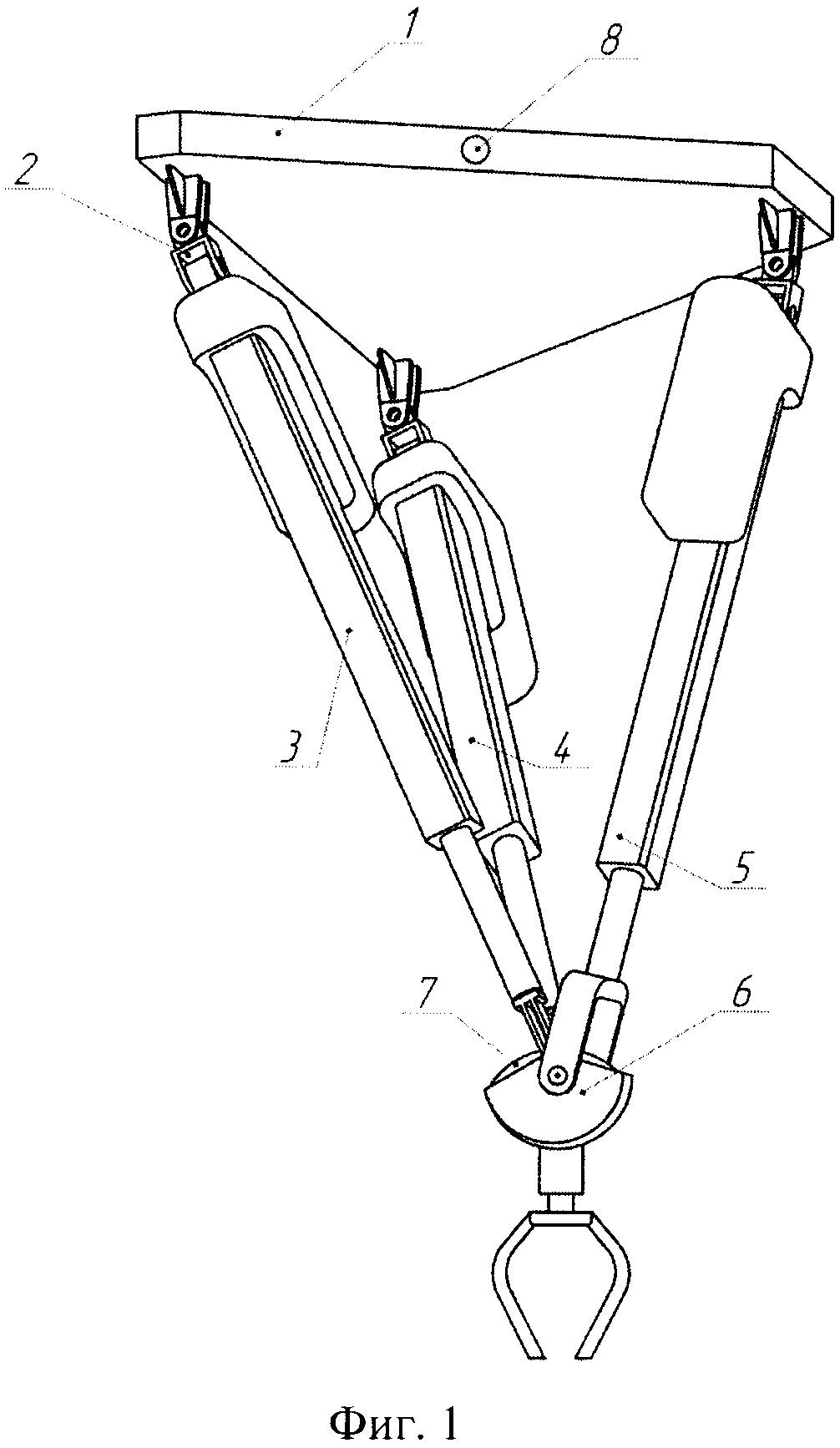
Стрела грузоподъемного средства
Кран-манипулятор
Устройство для снижения динамической нагруженности трансмиссии транспортного средства
Рабочий орган культиватора
Рабочий орган культиватора
Способ оперативного определения жизненного состояния посевов озимой пшеницы
Способ локализации и тушения низовых лесных и степных пожаров и устройство для его реализации
Малогабаритный электропогрузчик со стреловым грузоподъемным устройством
Искусственный корм для раков в личиночный период при выращивании в закрытых водоемах
Искусственный корм для раков в личиночный период при выращивании в закрытых водоемах
Система локально-внутрипочвенного орошения многолетних насаждений
Навесной вилочный погрузчик

