Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА АЭРОЭЛЕКТРОРАЗВЕДКИ
Вид РИД
Изобретение
Изобретение относится к области аэрогеофизических методов и может быть использовано при поиске подводных лодок (ПЛ) и полезных ископаемых, а также для изучения геологического строения участков земли и решения других прикладных задач.
Известен способ аэроэлектроразведки, при котором генератором тока и индукционной катушкой, подвешенной к летательному аппарату (ЛА), возбуждают в вертикальном магнитном диполе низкочастотное электромагнитное поле и измеряют вектор напряженности магнитной индукции (Патент РФ 2383905, МПК G01V 3/165).
По величине отклонений полученных значений от нормальных для однородной среды, определяют участки неоднородной среды, по которым судят о характере распределения электромагнитных параметров на разведываемой территории.
Для реализации этого способа используется система аэроэлектроразведки, содержащая жесткую раму с индукционной катушкой, генерирующей переменное магнитное поле. Индукционная катушка смонтирована на раме, подвешенной к ЛА. Для оценки величины отклонения измеренных значений поля от нормальных для однородной среды используют измеритель напряженности магнитного поля и бортовое вычислительное устройство.
Недостаток этого способа - ограничение допустимых размеров индукционной катушки, обуславливающее ограничение глубины поиска и ограничение допустимых скоростей полета из-за аэродинамического сопротивления и раскачивания подвешенного узла с индукционной катушкой при маневрировании ЛА. Это снижает производительность и качество аэроэлектроразведки.
Известен способ аэроэлектроразведки (патент РФ 2529584, МПК G01V 3/165, B64D 3/00, прототип), при котором возбуждают низкочастотное электромагнитное поле в вертикальном магнитном диполе, формируемом генератором тока и индукционной катушкой, размещенной на планирующей раме, буксируемой ЛА. Перемещают раму с индукционной катушкой на заданной высоте и регистрируют координаты точек ее положения. Измеряют вектор напряженности магнитной индукции и регистрируют время и координаты точек измерений. По пространственному расположению отклонений величины отклика неоднородной среды на воздействие магнитного поля от величины отклика однородной среды, выявляют координаты участков неоднородной среды, по которым судят о характере распределения электромагнитных параметров этой среды на разведываемой территории.
Для реализации этого способа используется система аэроэлектроразведки, содержащая жесткую планирующую раму с индукционной катушкой, генераторного контура, устройство навигации, измеритель величины отклика среды на воздействие магнитного поля, бортовое вычислительное устройство с модулем определения текущего положения индукционной катушки и модулем оценки величины отклика среды на воздействие магнитного поля. При этом способе узел с индукционной катушкой имеет такую форму, которая снижает аэродинамическое сопротивление потоку воздуха и поддерживается в относительно постоянной ориентации при буксировке. Это обеспечивает более высокую стабильность результатов аэроэлектроразведки при более высокой производительности работ, обусловленной большими допустимыми скоростями полета.
Общим недостатком известных способов и устройств аэроэлектроразведки является недостаточная глубина обнаружения ПЛ и электромагнитного зондирования недр земли при поиске месторождений углеводородов и других полезных ископаемых по сравнению с полевыми методами, это обусловлено тем, что размер рамы для бортовой индукционной катушки ограничивает ее габариты величиной порядка несколько метров. Это много меньше, чем для наземных систем, где они достигают сотен метров. Так как, чем меньше диаметр индукционной катушки, тем слабее ее магнитный дипольный момент, то этим обстоятельством ограничена эффективность известных способов и устройств аэроэлектроразведки.
Техническим результатом, на который направлено изобретение, является увеличение глубины обнаружения ПЛ и электромагнитного зондирования недр земли при поиске месторождений углеводородов и других полезных ископаемых.
Технический результат достигается тем, что способ аэроэлектроразведки, при котором возбуждают низкочастотное электромагнитное поле в вертикальном магнитном диполе, формируемом генератором тока и индукционной катушкой, буксируемой летательным аппаратом, перемещают индукционную катушку на заданной высоте, и регистрируют текущие координаты ее положения, одновременно измеряют величину отклика среды на воздействие магнитного поля, по пространственному расположению отклонений величины отклика от неоднородностей среды на воздействие магнитного поля от величины отклика однородной среды, выявляют координаты участков неоднородной среды, по которым судят о характере распределения электромагнитных параметров этой среды на разведываемой территории. Буксировку индукционной катушки производят, по меньшей мере, тремя летательными аппаратами, индукционную катушку формируют натяжением по воздуху кабеля, проходящего петлей поочередно через эти летательные аппараты, непрерывно определяют относительно ЛА координаты опорных точек, расположенных по длине кабеля, по координатам опорных точек вычисляют текущие геометрические параметры формы катушки и ее положение в системе координат, привязанной к ЛА, и преобразовывают их в глобальную систему координат, вычисляют текущие значения величины и направление магнитного дипольного момента катушки в глобальной системе координат и вычисляют опорное значение отклика окружающей среды применительно к текущим значениям величины и направления магнитного дипольного момента индукционной катушки и применительно к условиям ее полета над разведываемой территорией.
Система аэроэлектроразведки содержит основной летательный аппарат, буксирующий индукционную катушку генераторного контура, устройство навигации, измеритель величины отклика среды на воздействие магнитного поля, бортовое вычислительное устройство с модулем измерителя текущего положения индукционной катушки относительно летательного аппарата и модулем регистрации текущего значения величины отклика среды на воздействие магнитного поля, отличающаяся тем, что в нее введены, по меньшей мере, два дополнительных летательных аппарата, буксирующих индукционную катушку генераторного контура, индукционная катушка выполнена натянутым по воздуху кабелем, проходящим петлей через буксирные конструкции летательных аппаратов, по длине кабеля расположены маркеры системы дистанционного позиционирования относительно ЛА, причем бортовое вычислительное устройство снабжено программными модулями:
- вычисления текущего положения каждого маркера в системе координат, привязанной к основному летательному аппарату;
- вычисления текущих геометрических параметров формы индукционной катушки и ее текущего положения в системе координат, привязанной к основному летательному аппарату;
- преобразования геометрических параметров формы индукционной катушки и ее текущего положения по данным устройства навигации в глобальную систему координат;
- вычисления текущих значений величины и направления магнитного дипольного момента индукционной катушки в глобальной системе координат;
- вычисления расчетных значений отклика среды.
Таким образом, предложенные способ и система аэроэлектроразведки позволяют существенно увеличить объем получаемой информации, ее разрешающую способность и глубину исследований, снизить стоимость съемки, упростить конструкцию устройств аэроэлектроразведки. В связи с этим такие способы и устройства аэроэлектроразведки могут найти широкое применение для поиска подводных лодок месторождений полезных ископаемых, для непрерывного площадного электромагнитного мониторинга сейсмоопасных районов и решения других прикладных задач.
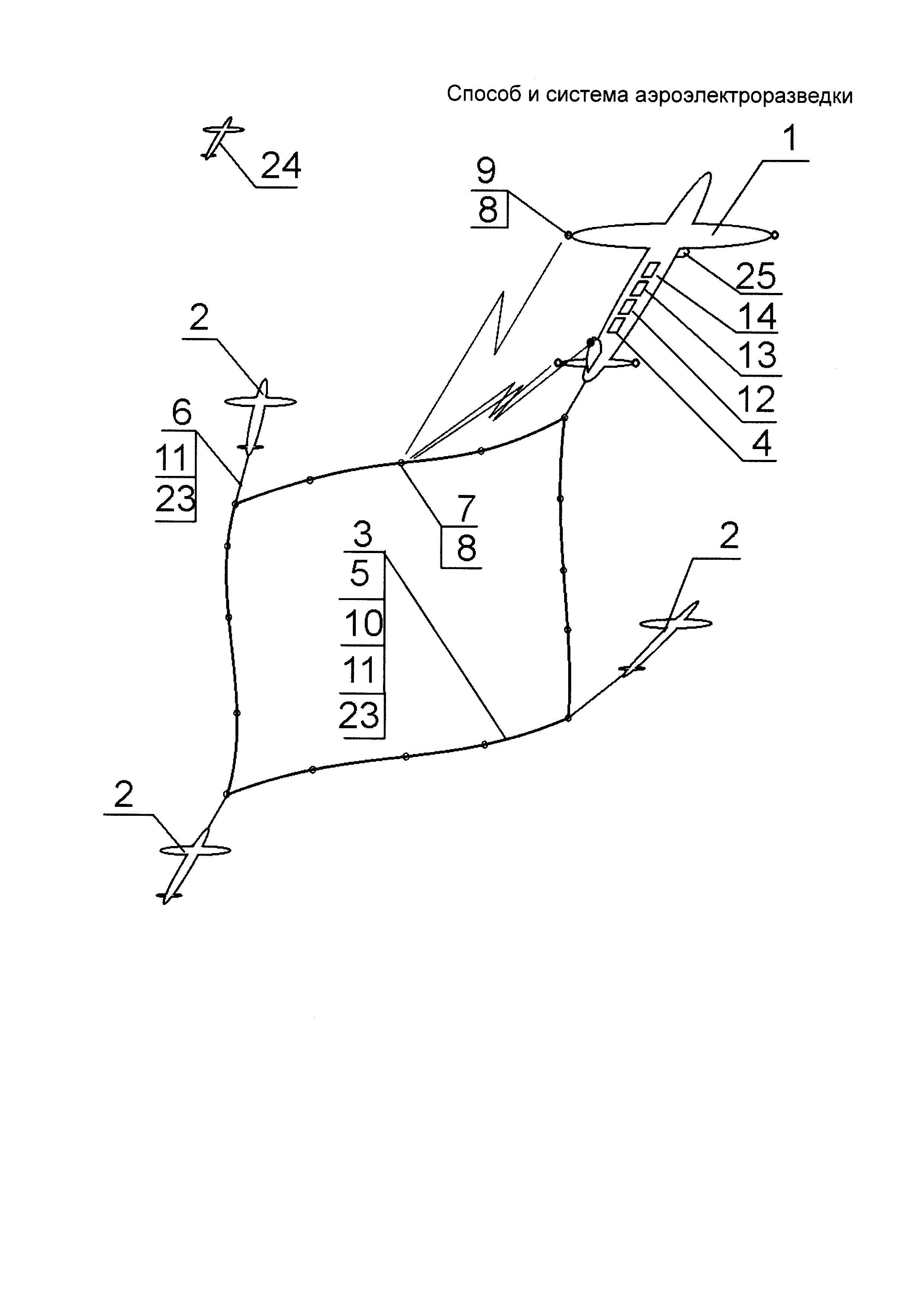
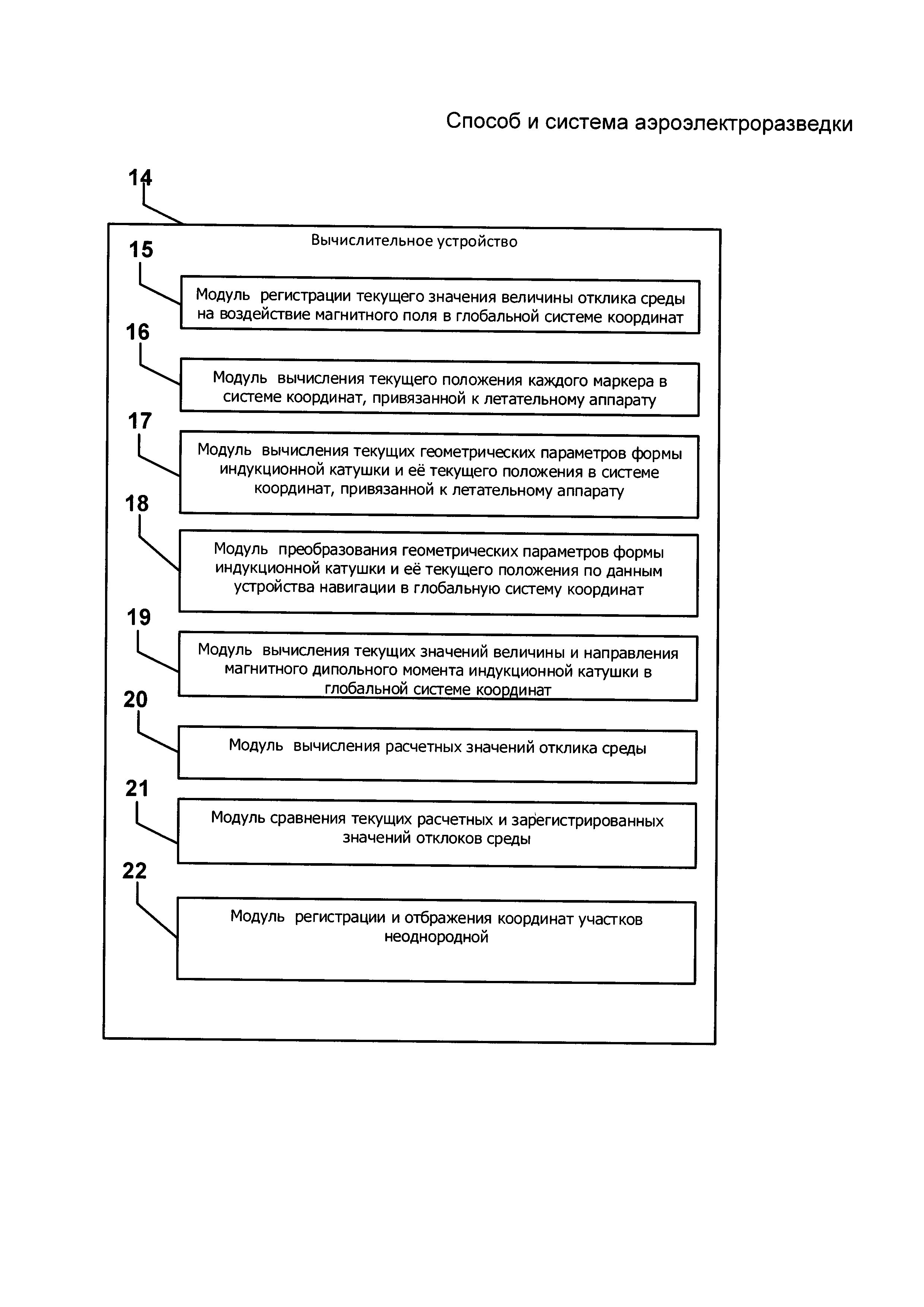
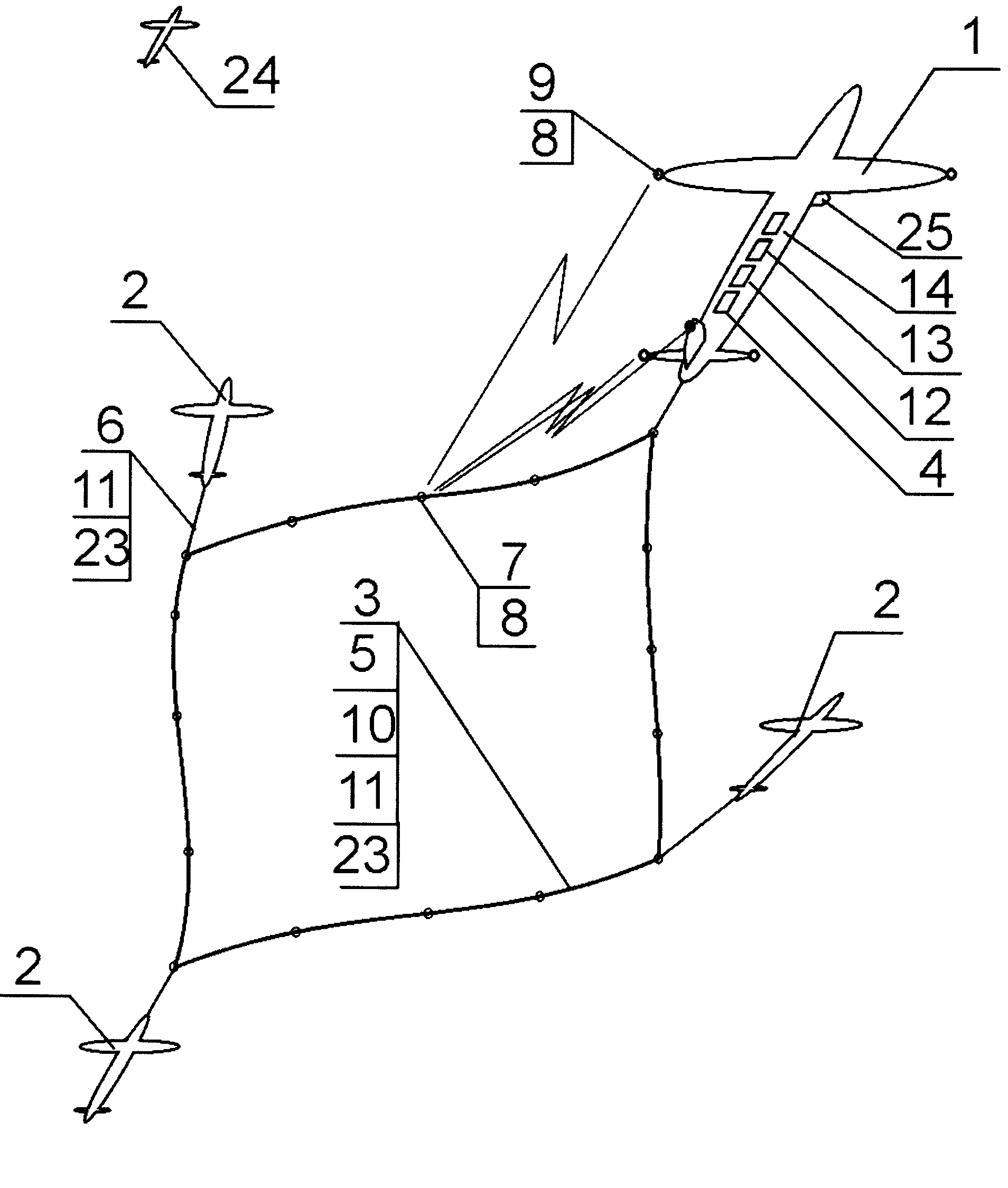
Сущность изобретения поясняется чертежами, где на фиг. 1 показана система аэроэлектроразведки, а на фиг. 2 - блок-схема программных модулей бортового вычислительного устройства, применительно к решаемой задаче электроаэроразведки.
Система аэроэлектроразведки содержит ЛА 1 и дополнительные ЛА 2, буксирующие индукционную катушку 3, формирующую вместе с генератором 4 тока от с частотой нуля до десятков герц генераторный контур.
Индукционная катушка 3 выполнена натянутым по воздуху кабелем 5, поочередно проходящим петлей через буксирующие ее конструкции, например кабель-тросы 6 ЛА 1 и 2.
По длине кабеля 5 расположены маркеры 7 системы дистанционного позиционирования 8 этого кабеля 5 относительно ЛА 1. Система дистанционного позиционирования 8 включает в себя, как варианты по меньшей мере, три размещенных и пространственно разнесенных на ЛА 1 регистратора 9 электромагнитных (световых или радиочастотных) сигналов, взаимодействующие с маркерами 7 путем регистрации времени прохождения между ними электромагнитных (например, световых) импульсов или, по меньшей мере, две пространственно разнесенные оптические камеры, с фотоприемными матрицами (на чертеже не показаны).
С точки зрения обеспечения максимальной точности позиционирования маркеров 7, предпочтительно использовать оба варианта, как взаимно дополняющие друг друга.
Маркеры 7, взаимодействующие с регистраторами 9, путем регистрации времени прохождения между ними электромагнитных (световых) импульсов, предпочтительно, могут быть выполнены в виде импульсных излучателей, запускаемых в заданной последовательности по линиям связи 10, например оптоволоконным, конструктивно объединенной с кабелем 5, и запитываться по линии электропитания 11, также конструктивно объединенным с кабелем 5, например, общей оболочкой.
Как вариант, маркеры 7, взаимодействующие с регистраторами 9, могут быть реализованы также попарно взаимодействующими в режиме передача-ответ импульсными приемопередатчиками, что исключает необходимость использования линии связи 10.
Маркеры 7, взаимодействующие оптическими камерами, могут быть выполнены в виде излучателей импульсов, длительность которых превышает длительность кадровой развертки оптических камер.
На ЛА 1 установлена система навигации 12 (включающая в себя приемники GPS или Глонасс, гировертикаль, гироазимут и т.п.), а также установлен трехкомпонентный магнитометр 13 и бортовое вычислительное устройство 14, включающее в себя следующие программные модули:
- модуль 15 - регистрации по показаниям магнитометра 13 и навигационной системы 12 текущего значения величины отклика среды на воздействие магнитного поля в глобальной (привязанной к Земле) системе координат регистрации;
- модуль 16 вычисления текущего положения каждого маркера 7 в системе координат, привязанной к летательному аппарату 1;
- модуль 17 вычисления текущих геометрических параметров формы индукционной катушки и ее текущего положения в системе координат, привязанной к ЛА 1;
- модуль 18 преобразования по данным навигационной системы 12 геометрических параметров формы индукционной катушки и ее текущего положения в глобальную систему координат;
- модуль 19 вычисления текущих расчетных значений величины и направления магнитного дипольного момента индукционной катушки в глобальной системе;
- модуль 20 вычисления расчетных (усредненных) значений ответной реакции окружающей среды по величине и направлению магнитного дипольного момента индукционной катушки при отсутствии или усреднении возмущающих воздействий, обусловленных предметом поиска применительно к текущим условиям полета полей,
- модуль 21 - сравнения текущих и расчетных значений откликов среды;
- модуль 22 регистрации отображения координат участков неоднородной среды.
Индукционная катушка 3 с генератором 4, как альтернативный вариант реализации способа, могут быть включены в схему низкочастотного автоколебательного контура (по принципу металлоискателей на биениях). При этом, в качестве измерителя величины отклика среды на воздействие магнитного поля может быть использован частотомер (на чертеже не показано).
ЛА 2 могут быть беспилотными с дистанционным управлением от ЛА 1 и электроприводом, запитанным от ЛА 1 по линии электропитания 23, конструктивно объединенной с кабелем 5 и с буксирными кабель-тросами 6 (например, общей оболочкой). Для обеспечения энергообеспечения они, на период самостоятельных взлета и посадки, могут быть снабжены аккумуляторами.
В системе могут быть использованы сторонние источники 24 текущих данных о глобальной электромагнитной обстановке в районе ведущейся аэроэлектроразведки (молниевые разряды, ионосферные процессы и т.п.), в качестве которых могут быть использованы наземные, надводные или авиационные средства, региональные данные мониторинга электромагнитной обстановки которых могут непрерывно транслироваться на ЛА 1.
ЛА 1, как вариант, в дополнение системы коррекции может быть снабжен подключенной к вычислительному устройству 14 радиолокационной системой с направленной вниз активной фазовой антенной решеткой 25.
Как вариант (на чертеже не показано), магнитометр 13, взаимодействующий с бортовым вычислительным устройством 14, может быть установлен на одном из ЛА 2. Он может быть размещен на гиростабилизированной платформе или снабжен взаимодействующей с вычислительным устройством 14 собственной системой угловой ориентации в пространстве, например бескарданным гироскопом. Это позволяет уменьшить влияния ЛА 1 на точность измерения текущей величины отклика среды на воздействие магнитного поля, том более, что планер и оборудование ЛА 2, не являющегося энергонасыщенным объектом, гораздо проще выполнить с более высоким уровнем использования не ферромагнитных (например, композитных материалов).
Система функционирует следующим образом.
До взлета ЛА 1 и 2 кабель 5 может быть сбухтован восьмерками на ЛА 1.
После взлета ЛА 1 поочередно, через буксирные кабель-тросы 6, сцепляется с ЛА 2 и они подключаются через эти кабель-тросы 6 к линиям электропитания 25.
В полете ЛА 2, оттягивая стравливаемый им участок кабеля 4 из ранее уложенной бухты, занимают положения относительно ЛА 1, взаимно разнесенные по боковым направлениям, что обеспечивает максимально возможную площадь индукционной катушки 3. Натяжением по воздуху кабеля 5, проходящего петлей поочередно через ЛА 1 и 2 и оттягиваемого в стороны ЛА 2 (выполняющими функцию отводителей, как в тралах), формируют индукционную катушку 3.
Возбуждают постоянное или низкочастотное электромагнитное поле в вертикальном магнитном диполе, формируемом генератором 4 тока и индукционной катушкой 3, буксируемой ЛА 1 и 2.
В процессе полета перемещают индукционную катушку 3 на заданной высоте, и системой дистанционного позиционирования 8 непрерывной фиксируют текущие координаты ее опорных точек, расположенных вдоль кабеля 5.
Одновременно магнитометром 13 непрерывно измеряют текущие величины отклика среды на воздействие магнитного поля и регистрируют их модулем 15 и, по данным навигационной системы 12, фиксируют их в глобальной системе координат.
Маркеры 7, взаимодействующие с регистраторами 9 путем регистрации времени прохождения между ними электромагнитных импульсов, поочередно излучают радиочастотные или световые импульсы, запускаемые опорными сигналами по линии связи 10 (если она используется) или в другом варианте (при использовании в качестве регистраторов 9 приемопередатчиков), ответные.
Модуль 16 регистрирует времена прохождения импульсов между маркерами 7 и регистраторами 9 и пересчитывает их в расстояния между парами «маркер 7 - регистратор 9». Производя триангуляционные вычисления по трем расстояниям между парами «маркерами 7 - регистратор 9», модуль 16 определяет текущие координаты каждого маркера 7 относительно ЛА 1.
Маркеры 7, взаимодействующие регистраторами 9, реализуемыми в виде оптических камер, поочередно излучают световые сигналы, а модуль 16 вычисляет угловые координаты маркеров 7 по расположению засвечиваемых пикселей на их матрицах (на чертеже не показаны) и по пересечению этих направлений вычисляет координаты каждого маркера 7 относительно ЛА 1.
В результате, в том или другом варианте, система позиционирования 8 определяет координаты маркеров 7, расположенных в опорных точках по длине кабеля 5 относительно ЛА.
По координатам опорных точек, определяемых положением маркеров 7, модуль 17 вычисляет текущие геометрические параметры формы индукционной катушки 3 и ее положение в системе координат, привязанной к ЛА 1.
Модуль 18 преобразовывает геометрические параметры формы индукционной катушки и ее текущее положение из системы координат, привязанной к ЛА 1, в глобальную систему координат.
Модуль 29, по данным модуля 18 и текущей величине выходного тока генератора 4, вычисляет расчетные текущие значения величины и направления магнитного дипольного момента индукционной катушки в системе координат ЛА 1.
Модуль 21 сравнивает текущие расчетные и зарегистрированные магнитометром 13 значения откликов среды (как вариант, в качестве расчетных значений могут быть использованы результаты усреднения предыдущих текущих измерений, нормализованные по уровню текущих магнитных дипольных магнитного моментов).
Модуль 22 регистрирует координаты участков неоднородной среды и по необходимости по данным, поступающим от сторонних источников 24, производит их корректировку с учетом влияния распределения глобальных электромагнитных полей, а по данным, поступающим с радиолокационной станции 25 производит их корректировку с учетом влияния неровности поверхности раздела двух сред - воздуха и поверхности земли или, соответственно, воды, оцененного, например, путем использования ранее полученных экспериментальных данных.
Модуль 22 отображает пространственное распределение участков неоднородной среды, например, в графическом виде. По этому отображению величины отклика неоднородной среды на воздействие магнитного поля выявляют координаты участков неоднородной среды, по которым судят о характере распределения электромагнитных параметров этой среды на разведываемой территории.
Как вариант, ЛА 2 могут быть постоянно подключенными и при взлете размещаться на борту ЛА 1, при этом один из них, оттягивающий в полете катушку сзади, как вариант, может быть дистанционно управляемым планером. Эта возможность обусловлена тем, что равнодействующая силы натяжения кабеля совпадает с направлением полета.
Предложение позволяет, за счет повышения увеличения глубины поиска аэроэлектроразведки, повысить защищенность арктических акваторий от подводных средств потенциального противника и повысить эффективность поиска полезных ископаемых.
Способ изготовления секций трехслойной конструкции из полимерных композиционных материалов
Способ комбинированной выработки механической, тепловой энергии и получения твердого диоксида углерода
Эпоксидная композиция для адгезионного слоя и армирующий наполнитель на его основе
Устройство защиты от разрушения опорных зон опытных образцов из полимерных композиционных материалов при их статических испытаниях на сжатие
Способ ремонта диффузионного отделителя водорода
Мобильная лаборатория для испытаний на электромагнитные воздействия
Способ электромагнитных испытаний объекта и система для его реализации
Устройство диагностики контактов силового электрооборудования
Кабельная оптическая линия подводного средства
Система защиты от коррозии гребного винта и гребного вала судна
Система для оценки помехоустойчивости телекоммуникационного комплекса

