Результат интеллектуальной деятельности: Способ управления системой приводов вибросита
Вид РИД
Изобретение
Способ относится преимущественно к нефтяной и газовой промышленности и может быть применен для управления системой приводов бурового вибросита с линейной или эллиптической траекторией колебаний рамы.
Близким к предлагаемому способу является способ управления синхронизацией системы приводов вибросита (А.с. СССР 1264998, МПК7 B07B 1/40. Способ управления процессом синхронизации динамической системы / Трубицын В.Г., Блехман И.И., Усменец А.С., Полоцкий В.А., Печенев А.В., Тодоров B.C., Рожков В.А.).
Недостатком этого способа является неоднородность траекторий виброколебаний по длине рамы вибросита, что уменьшает его пропускную способность.
Наиболее близким заявляемому способу является способ управления системой приводов вибросита (Патент на изобретение РФ №2402387, МКИ 7 B07B 1/42, E21B 21/06. Способ управления системой приводов вибросита / Кичкарь И.Ю., Кичкарь Ю.Е., Миллер А.С).
Недостатком этого способа является невысокое качество регулирования, проявляющееся в нестабильности траектории рамы вибросита, и сложность технической реализации изменения значения фазного напряжения трехфазной сети, подводимого к электродвигателям вибровозбудителей. Невысокое качество регулирования объясняется тем, что система приводов является слишком сложным объектом для одноконтурной системы автоматического регулирования даже при Пропорционально-Интегрально-Дифференциальном - регуляторе.
Задачей изобретения является повышение качества регулирования системы приводов, позволяющего повысить эффективность просеивания вибросита и упрощение технической реализации способа управления системой приводов вибросита.
Техническим результатом является повышение пропускной способности вибросита качеством регулирования вследствие использования релейного управления в фазовом пространстве.
Способ управления системой приводов вибросита из двух дебалансных возбудителей, включающий измерение времени оборота первого дебаланса, измерение сдвига по фазе между углами поворотов второго и первого дебалансов, определение разности между полученным значением и значением сдвига по фазе заданного конструкцией вибросита и воздействие на электродвигатели дебалансных возбудителей для сведения к нулевому значению этой разности, в котором дополнительно осуществляют измерение времени оборота второго дебаланса, затем определяют разность времен оборотов дебалансов, потом определяют линейную комбинацию этой разности и разности сдвига фаз, и если первоначально знак разности сдвига фаз положителен и текущий знак линейной комбинации положителен, то отключают от сети электродвигатель привода дебаланса, вращающегося в положительном направлении, если же текущий знак линейной комбинации фаз отрицателен, то этот электродвигатель подключают к сети, если первоначально знак разности сдвига фаз отрицателен и текущий знак линейной комбинации отрицателен, то отключают от сети электродвигатель привода дебаланса, вращающегося в отрицательном направлении, если же текущий знак линейной комбинации положителен, то этот электродвигатель подключают к сети.
Время оборота первого и второго дебалансов связано с их средними за период угловыми скоростями вращения ω1 и ω2 следующими соотношениями:

где Δt1, Δt2 - время оборота соответственно первого и второго дебалансов;
ω1, ω2 - средние за период угловые скорости вращения соответственно первого и второго дебалансов.
Разность времен оборотов роторов дебалансов Δt=Δt1-Δt2 связана с разностью их угловых скоростей Δω=ω2-ω1 следующим образом:

В переходных процессах разность Δω не более одного процента от ω1, а последняя изменяется незначительно (в пределах от 149 до 155 с-1) и может быть принята постоянной. Поэтому с достаточной для управления точностью разность угловых скоростей Δω пропорциональна разности времен оборотов Δω

Разность между значением сдвига по фазе углов поворота роторов второго и первого дебалансов заданного конструкцией вибросита и его измеренным значением

где αК - сдвиг по фазе углов поворота роторов второго и первого дебалансов заданного конструкцией вибросита;
αИ - измеренное значение сдвига по фазе углов поворота роторов второго и первого дебалансов;
связана с разностью угловых частот Δω соотношением

Скорость изменения разности угловых частот Δω роторов второго и первого дебалансов описывается следующим дифференциальным уравнением:

где ΔM1, ΔM2 - избыточные моменты приводов соответственно первого и второго дебалансных вибровозбудителей:
Jэкв - эквивалентный момент инерции роторов системы приводов вибросита.
Эти обстоятельства, а именно выражения (5) и (6), позволяют рассматривать движение системы приводов вибросита на фазовой плоскости в координатах (Δα, Δω).
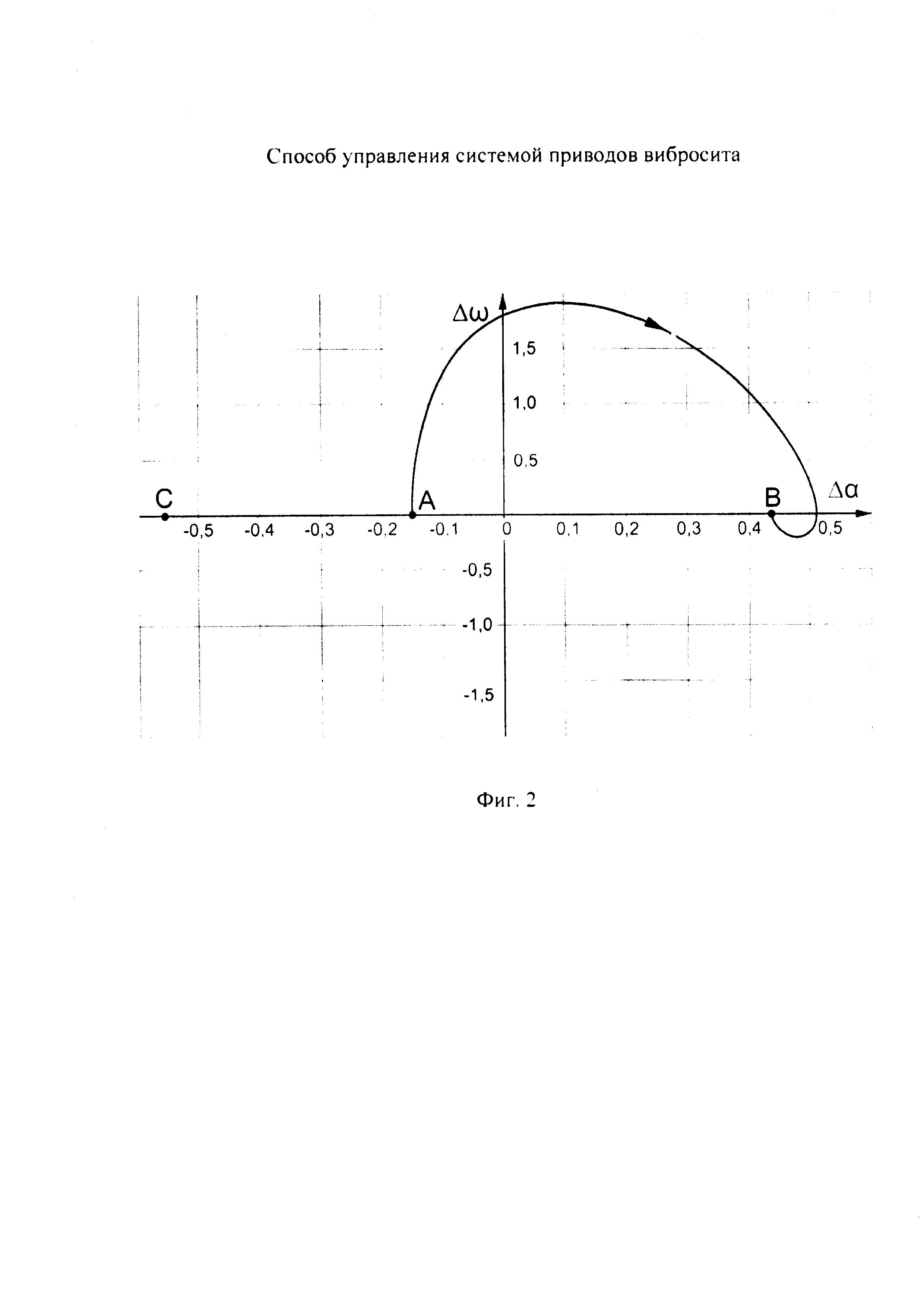
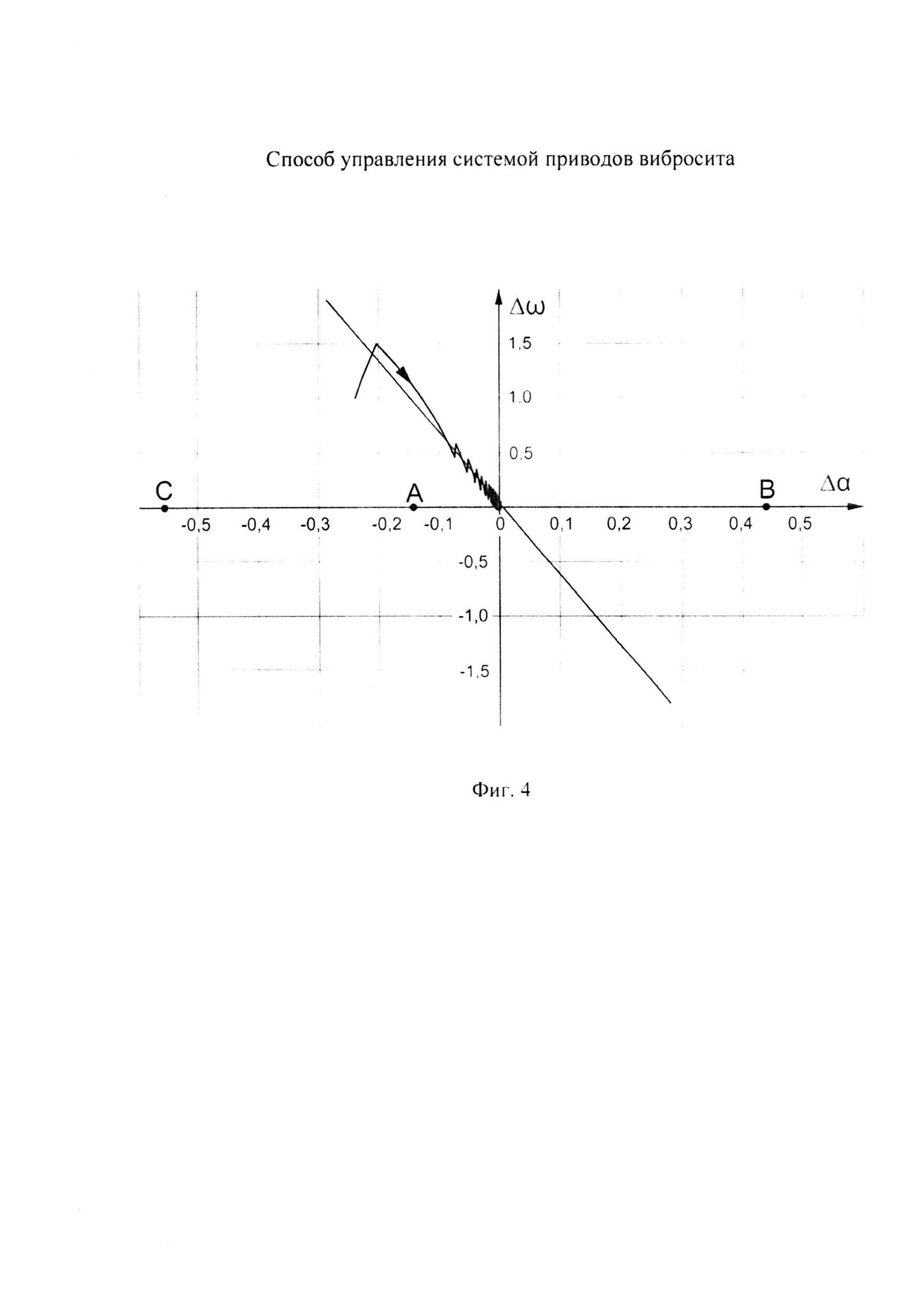
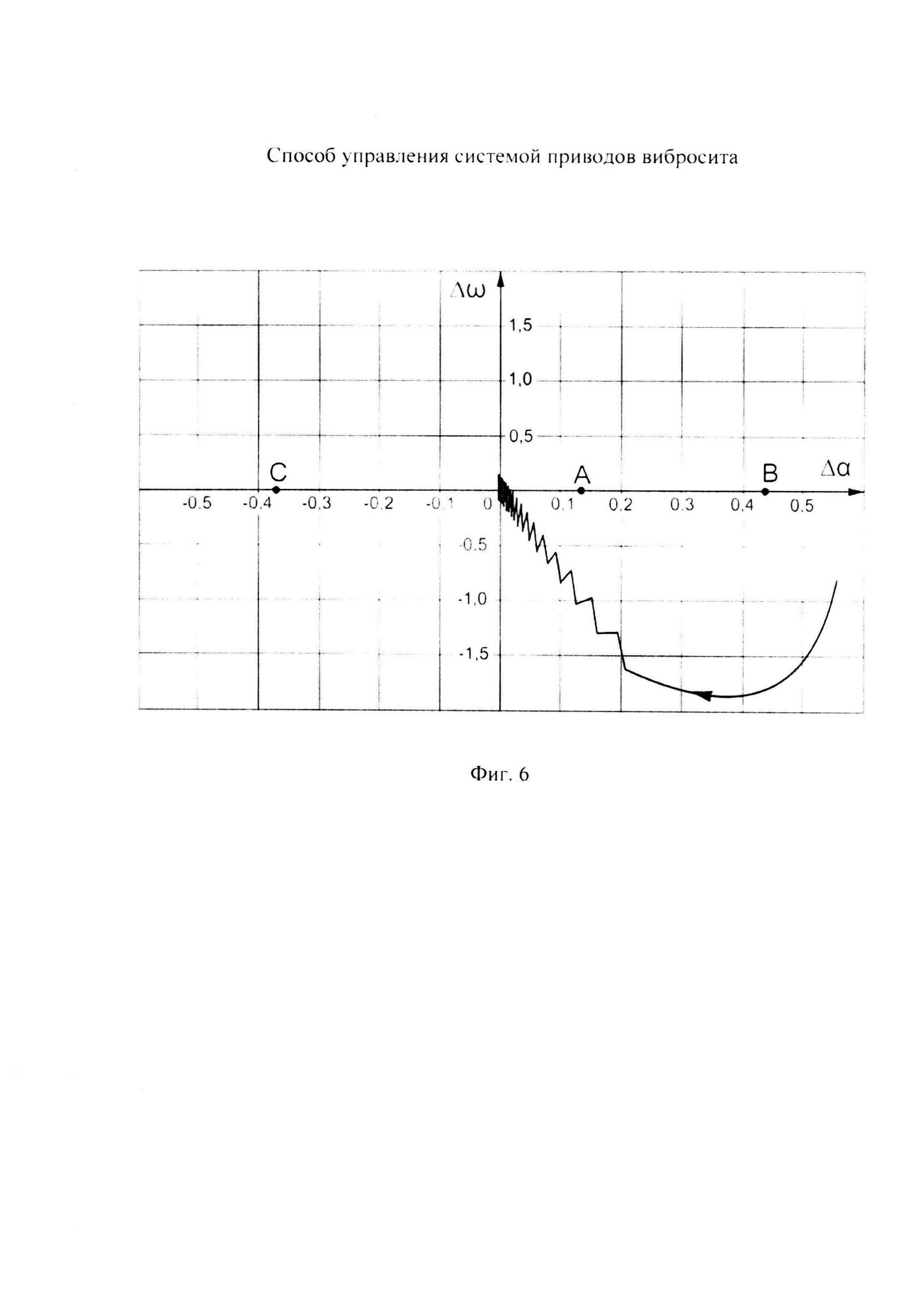
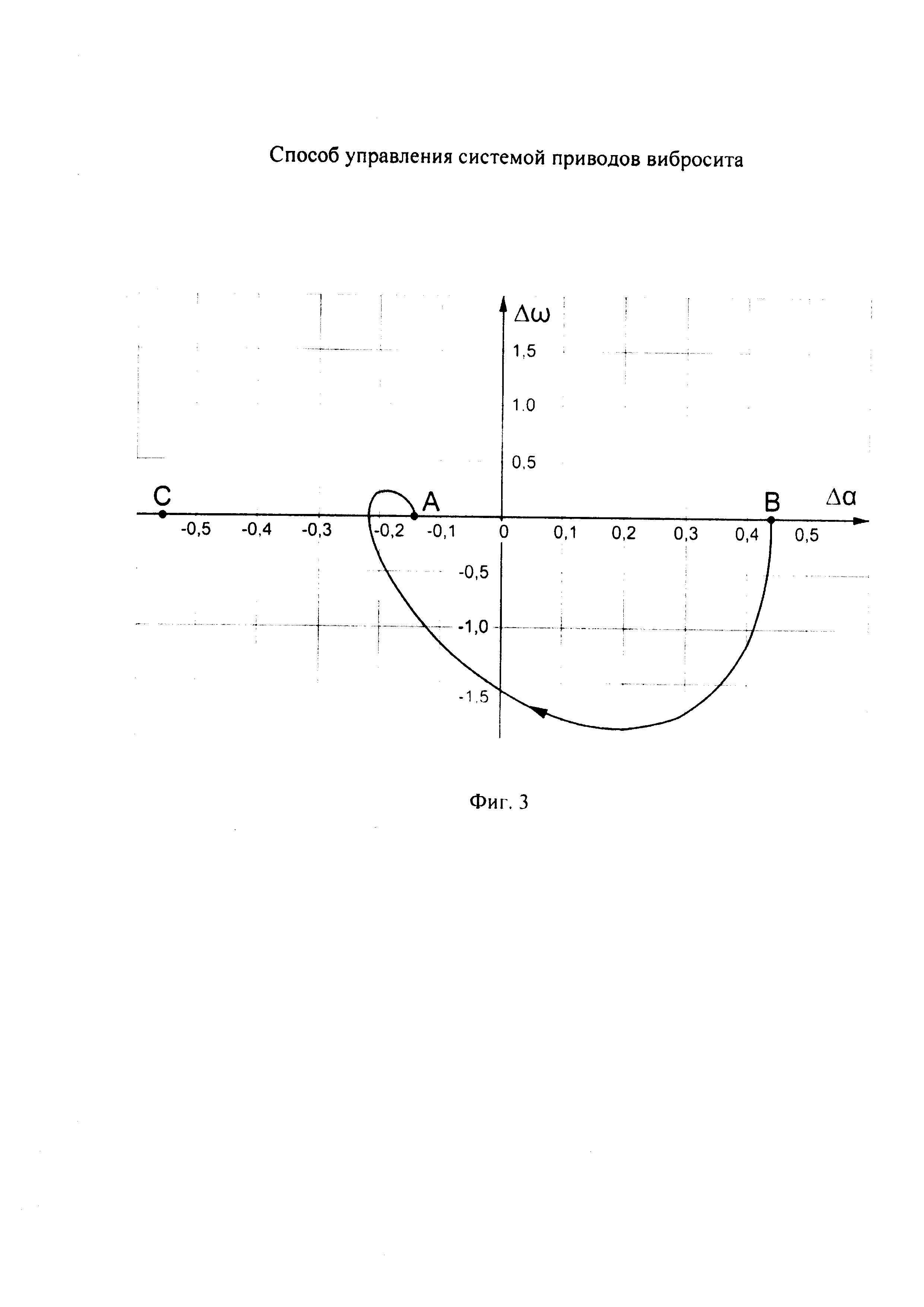
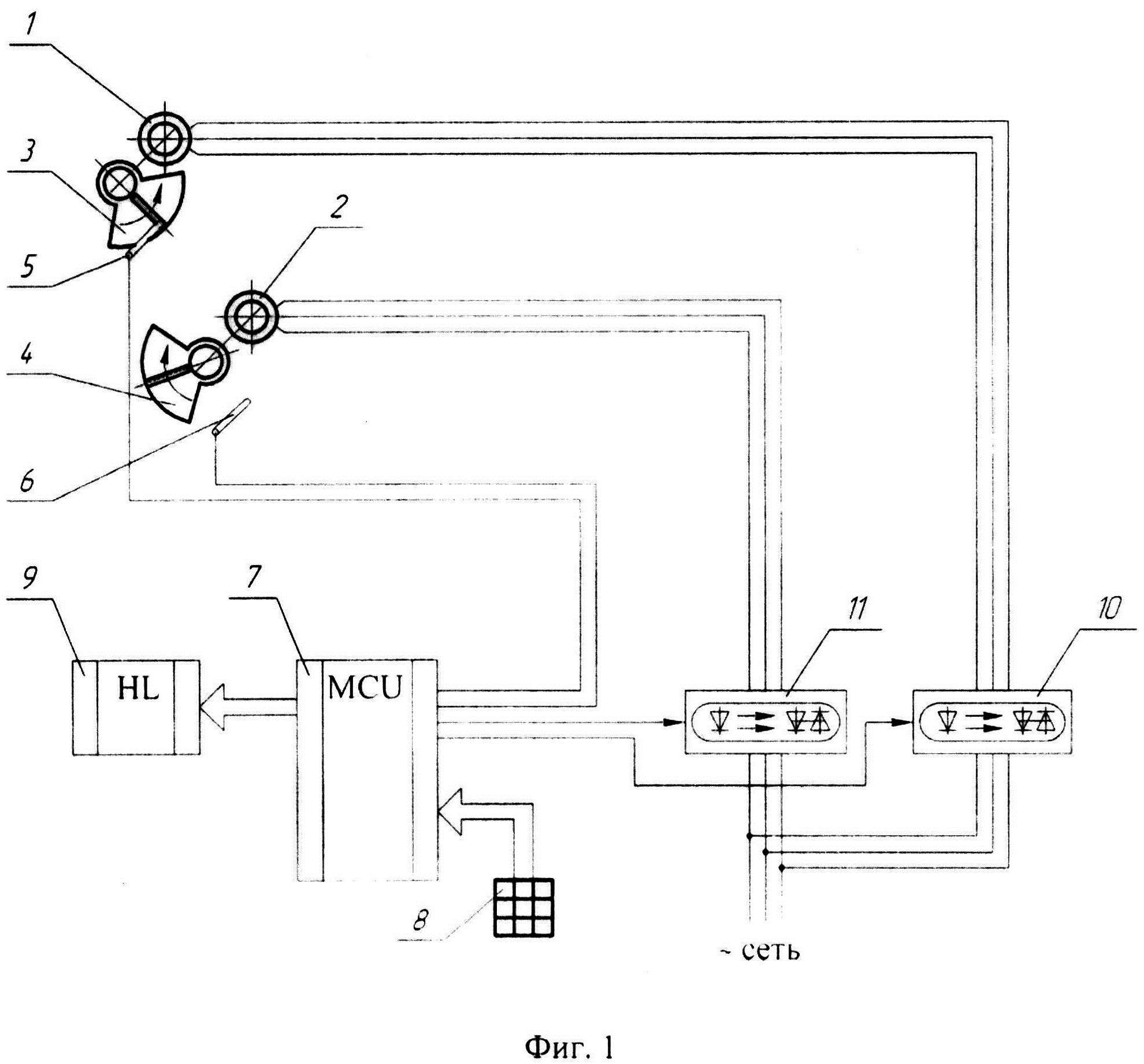
На фиг. 1 представлена функциональная схема системы управления системой приводов вибросита по предлагаемому способу. На фиг. 2 и фиг. 3 изображена фазовая плоскость с тремя устойчивыми точками и фазовыми траекториями перехода из одной точки в другую точку для вибросита СВ1Л. На фиг. 4, фиг. 5 и фиг. 6 изображены результаты процесса управления системой приводов на фазовой плоскости по предлагаемому способу.
Способ реализован в системе управления системой приводов вибросита на фиг. 1, состоящей из двух дебалансных вибровозбудителей (ДБВ), образованных соответственно приводными асинхронными короткозамкнутыми электродвигателями 1 и 2 и дебалансами 3 и 4. Датчики 5 и 6 нулевых положений дебалансов подключены к входным портам программируемого контроллера 7. Клавиатура контроллера 8 подключена к входному порту контроллера 7, а цифровой индикатор 9 - к его выходному порту. Управляющие входы бесконтактных пускателей 10 и 11 подключены к портам дискретных выходов контроллера 7.
По сигналам датчиков 5 и 6 в программируемом контроллере 7 измеряются времена оборотов роторов первого и второго дебалансных возбудителей Δt1, Δt2, затем вычисляется разность этих времен Δt. Как видно в формуле (2), эта разность пропорциональна разности угловых частот роторов дебалансов. По сигналам датчиков 5 и 6 в программируемом контроллере 7 измеряется также интервал времени между прохождением роторами второго и первого ДБВ своих нулевых положений Δtразн, который затем пересчитывается в измеренный сдвиг по фазе αИ по формуле (1) из прототипа

Затем по формуле (4) вычисляется разность сдвигов по фазе Δα, после чего вычисляется линейная комбинация

Анализ движения системы приводов вибросита можно наглядно производить на фазовой плоскости в координатах (Δα, Δω). При отсутствии управления на фазовой плоскости имеются три устойчивые точки как показано на фиг. 2 и 3. В точке А включены двигатели обеих ДБВ. Если после выхода вибросита на установившиеся виброколебания, выключить один из двигателей ДБВ, то при достаточном значении вибрационного момента продолжится вращение ротора этого ДБВ синхронно с другим ДБВ, но на немного меньшей угловой скорости и при существенно другом сдвиге по фазе между углами поворотов дебалансов. На фиг. 2 и 3 точка В соответствует выключенному электродвигателю ДБВ, вращающемуся в отрицательном направлении, а точка C - выключенному электродвигателю ДБВ, вращающемуся в положительном направлении. Положение точки А на фазовой плоскости относительно ее начала определяется экспериментально.
Цель управления системой приводов вибросита состоит в том, чтобы привести изображающую точку в центр фазовой плоскости и удерживать ее там. На фиг. 2 показана фазовая траектория перехода из точки А в точку В. На фиг. 3 показана фазовая траектория перехода из точки B в точку A, а также линия, соответствующая нулевому значению линейной комбинации c=Δt+a⋅Δα=0. Выше этой линии линейная комбинация положительна c=Δt+a⋅Δα>0, ниже этой линии линейная комбинация отрицательна c=Δt+a⋅Δα<0.
В зависимости от положения точки А относительно линии нулевого значения линейной комбинации используются одна из двух стратегий управления.
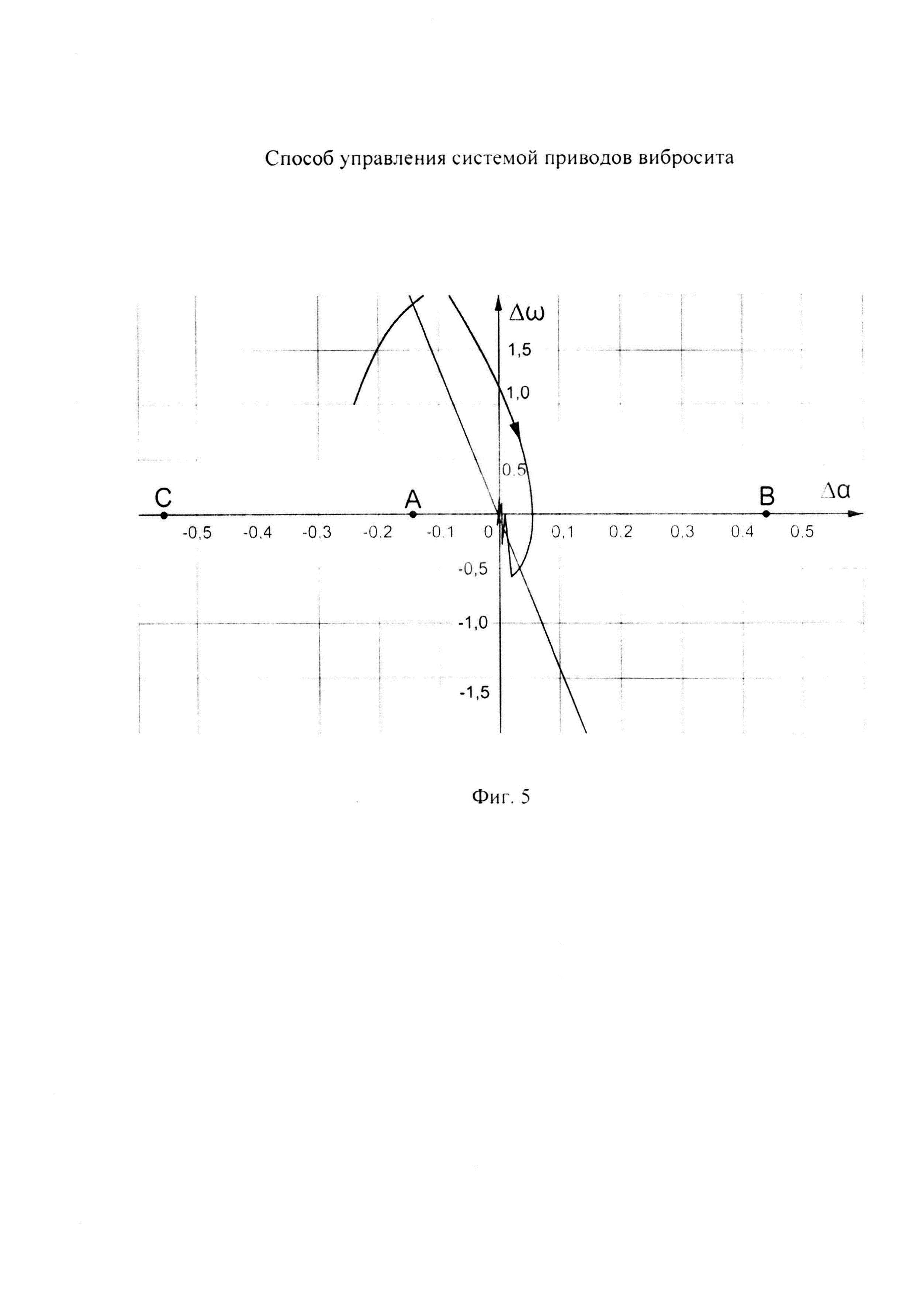
Если точка А расположена в области, соответствующей с<0, как показано на фиг 3, то при с<0 выключают электродвигатель ДБВ, вращающийся в положительном направлении, а при с>0 этот электродвигатель включают. Линия нулевого значения линейной комбинации, по сути, является линией переключения. Результат такого управления показан на фиг. 4, где виден скользящий режим по линии переключения. Чрезмерное увеличение коэффициента а в линейной комбинации c=Δt+a⋅Δα делает линию переключения более крутой, что приводит к «протыканию» линии переключения, как показано на фиг. 5. В результате этого ухудшается качество регулирования из-за увеличения длительности переходного процесса.
Если точка А расположена в области соответствующей c>0, как показано на фиг. 6, то при c>0 выключают электродвигатель ДБВ, вращающийся в положительном направлении, а при c<0 этот электродвигатель включают. Линия нулевого значения линейной комбинации и в этом случае является линией переключения. Результат такого управления показан на фиг. 6, где виден скользящий режим по линии переключения.
Опробование предлагаемого способа управления системой приводов вибросита проведено путем моделирования с использованием математической модели серийного вибросита СВ1Л (Свидетельство №2015661254 от 22.10.2015: программы для ЭВМ. Моделирование функционирования вибросита для очистки буровых растворов / Ю.Е. Кичкарь, И.Ю. Кичкарь, С.В. Горишный). Результаты моделирования управления по предлагаемому способу представлены на фиг. 2, 3, 4, 5 и 6. После окончания переходного процесса, т.е. когда изображающая точка приходит в область вблизи центра фазовой плоскости, в системе приводов вибросита СВ1Л возникают устойчивые автоколебания по Δα амплитудой не более 0,04 радиана и частотой менее 2 Гц.
Способ управления системой приводов вибросита из двух дебалансных возбудителей, включающий измерение времени оборота первого дебаланса, измерение сдвига по фазе между углами поворотов второго и первого дебалансов, определение разности между полученными значениями и значением сдвига по фазе заданного конструкцией вибросита и воздействие на электродвигатели дебалансных возбудителей для сведения к нулевому значению этой разности, отличающийся тем, что дополнительно осуществляют измерение времени оборота второго дебаланса, затем определяют разность времен оборотов дебалансов, потом определяют линейную комбинацию этой разности и разности сдвига фаз, и если первоначально знак разности сдвига фаз положителен и текущий знак линейной комбинации положителен, то отключают от сети электродвигатель привода дебаланса, вращающегося в положительном направлении, если же текущий знак линейной комбинации фаз отрицателен, то этот электродвигатель подключают к сети, если первоначально знак разности сдвига фаз отрицателен и текущий знак линейной комбинации отрицателен, то отключают от сети электродвигатель привода дебаланса, вращающегося в отрицательном направлении, если же текущий знак линейной комбинации положителен, то этот электродвигатель подключают к сети.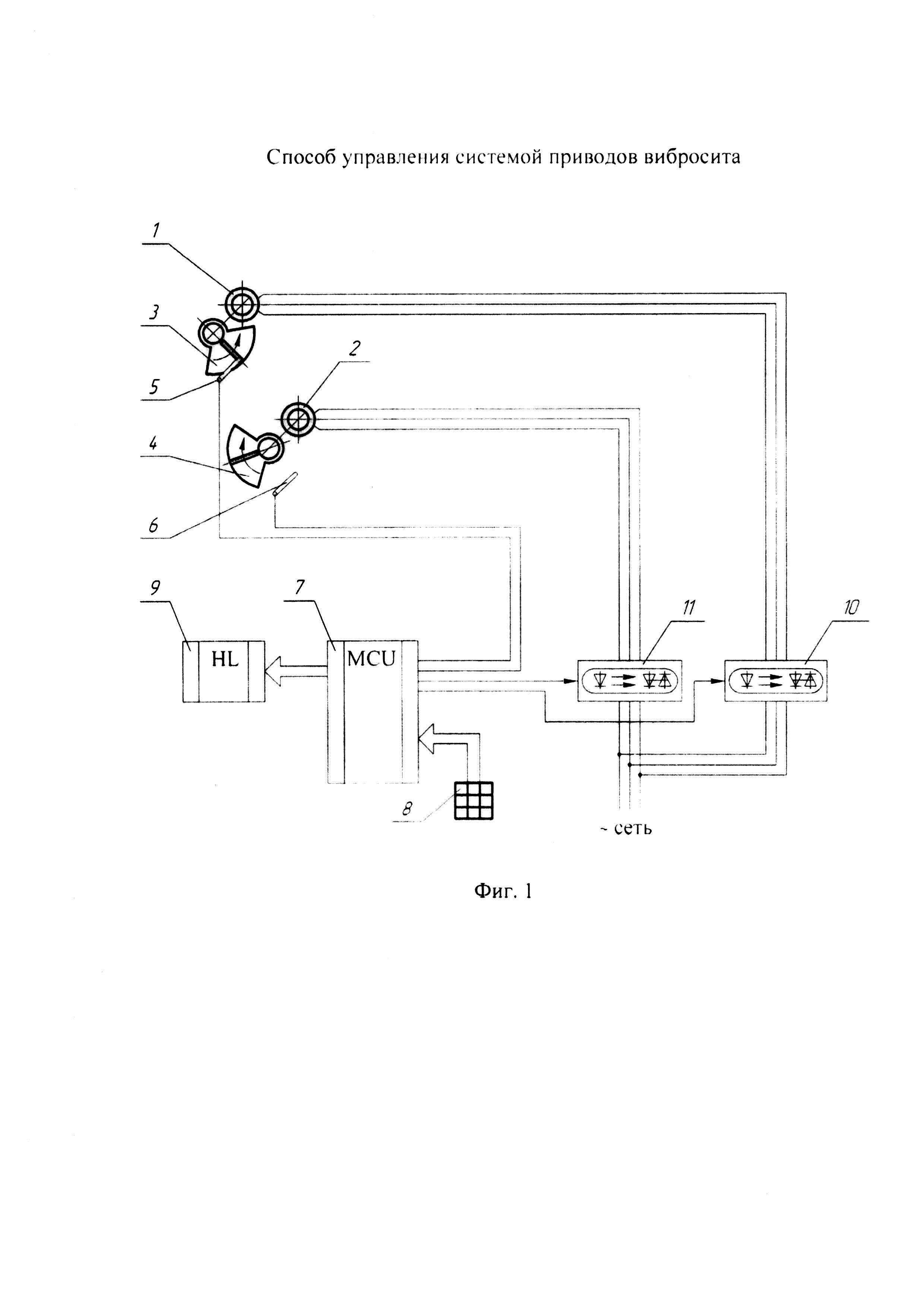
Стабилизированный аксиально-радиальный генератор постоянного тока
Устройство для определения места повреждения кабеля
Функциональный преобразователь
Способ изготовления магнитопроводов аксиальных электрических машин
Способ производства мягких вафель
Состав для производства мармелада
Устройство для перегонки эфирных масел из эфирномасличного зернового сырья
Состав для изготовления драже
Система определения геометрических параметров трехмерных объектов
Контроллер оценки и прогнозирования сохраняемости объектов со структурной неоднородностью

