Результат интеллектуальной деятельности: Система обработки радиолокационной информации
Вид РИД
Изобретение
Изобретение относится к области активной радиолокации, конкретно к системам обработки радиолокационной информации (РЛИ), и может быть использовано для измерения траекторных параметров отдельных элементов и сгустков элементов групповых баллистических объектов (ГБО).
Известны методы и средства /1-33/ цифровой обработки РЛИ, пригодные для измерения параметров ГБО.
Наиболее близкой по назначению и технической сущности к заявляемому изобретению относится система /1/ цифровой обработки РЛИ, содержащая последовательно соединенные устройство формирования зондирующих сигналов и передающую антенну, последовательно соединенные приемную антенну, устройство усиления и преобразования принимаемых сигналов, устройство первичной обработки сигналов, устройство вторичной обработки информации, устройство отображения и связи с потребителем, при этом устройство первичной обработки сигналов по второму сигнальному выходу соединено с устройством отображения и связи с потребителем, а управляющие входы входящих в систему указанных функциональных устройств соединены с блоком управления обработкой РЛИ.
При этом для измерения параметров ГБО устройство вторичной обработки информации снабжено встроенным программно-алгоритмическим обеспечением, основанным на стробовой / 2, с. 294-297 / обработке РЛИ.
Недостатком этой системы является повышенная вероятность формирования ложных траекторий ГБО, выдаваемых потребителю РЛИ.
Задачей изобретения является снижение вероятности формирования ложных траекторий ГБО, выдаваемых потребителю РЛИ.
Техническим результатом, обеспечивающим решение этой задачи, - уменьшение количества ложных трасс за счет учета сгущения и разрежения в пространстве элементов ГБО.
Достижение заявленного технического результата и, как следствие, решение поставленной задачи обеспечивается тем, что в системе обработки радиолокационной информации, содержащей последовательно соединенные устройство формирования зондирующих сигналов и передающую антенну, а также последовательно соединенные приемную антенну, устройство усиления и преобразования принимаемых сигналов, устройство первичной обработки сигналов, устройство вторичной обработки информации, устройство отображения и связи с потребителем, при этом устройство первичной обработки сигналов по второму сигнальному выходу соединено с устройством отображения и связи с потребителем, а управляющие входы входящих в систему указанных функциональных устройств соединены с блоком управления измерением параметров групповых баллистических объектов.
Согласно изобретению оно дополнительно содержит отдельное устройство для расчета траекторных параметров групповых баллистических объектов, установленное между устройством вторичной обработки информации и устройством отображения и связи с потребителем, при этом устройство обработки информации о ГБО содержит последовательно соединенные блок обработки радиолокационной информации обзора и блок межобзорной обработки радиолокационной информации.
При этом блок обработки радиолокационной информации обзора содержит последовательно соединенные блок разбиения множества отметок на подмножества, блок ранжирования, блок расчета геометрических центров подмножеств, причем блок ранжирования соединен по второму выходу с блоком отождествления подмножеств.
Блок межобзорной обработки радиолокационной информации содержит последовательно включенные блок отождествления подмножеств, запоминающее устройство опорных точек траекторий и блок вычисления траекторных параметров.
Дополнительное введение отдельного устройства расчета траекторных параметров ГБО, установленного между устройством вторичной обработки информации и устройством отображения и связи с потребителем, содержащего последовательно соединенные блок обработки радиолокационной информации обзора в составе блока разбиения множества отметок на подмножества, блока ранжирования, блока расчета геометрических центров подмножеств и блок межобзорной обработки радиолокационной информации в составе блока отождествления подмножеств, запоминающего устройства опорных точек траекторий, блока вычисления траекторных параметров, позволяет учесть особенности пространственной структуры (скопление и разрежение) ГБО. Этот учет позволяет обеспечить снижение вероятности образования ложных трасс.
В целом указанные технические преимущества позволяют решить поставленную задачу и достичь заявленного технического результата, заключающегося в снижении вероятности образования ложных трасс.
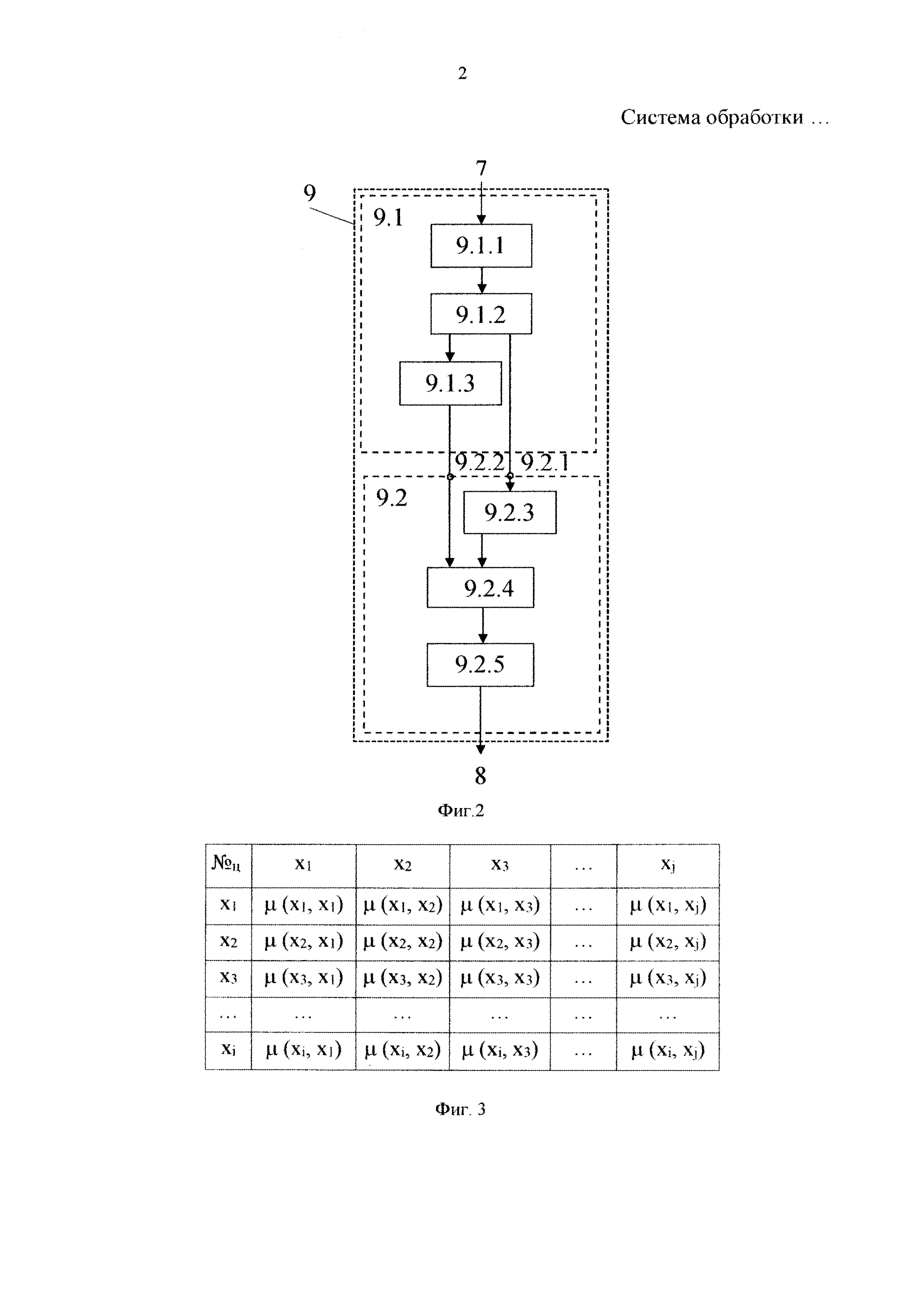
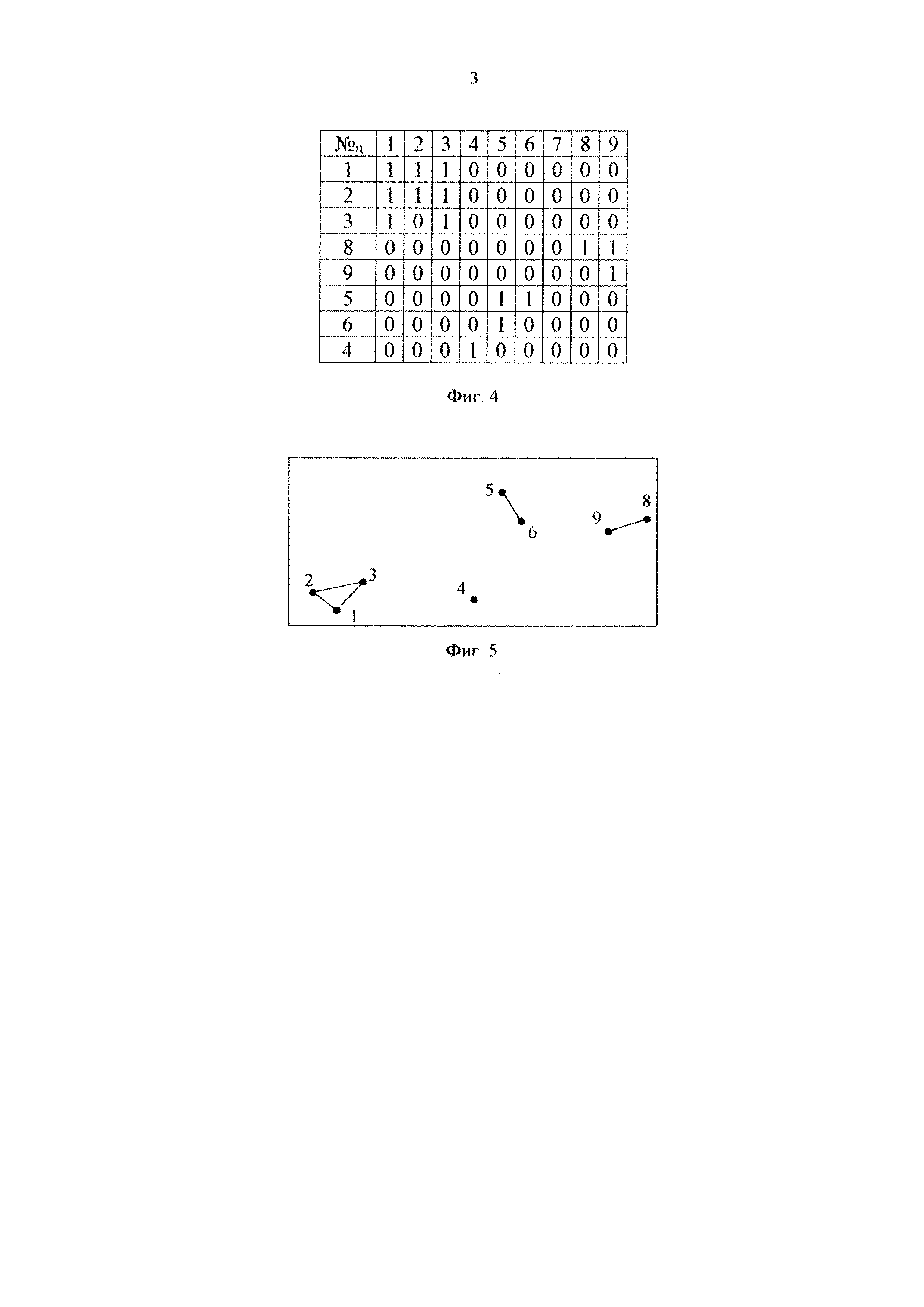
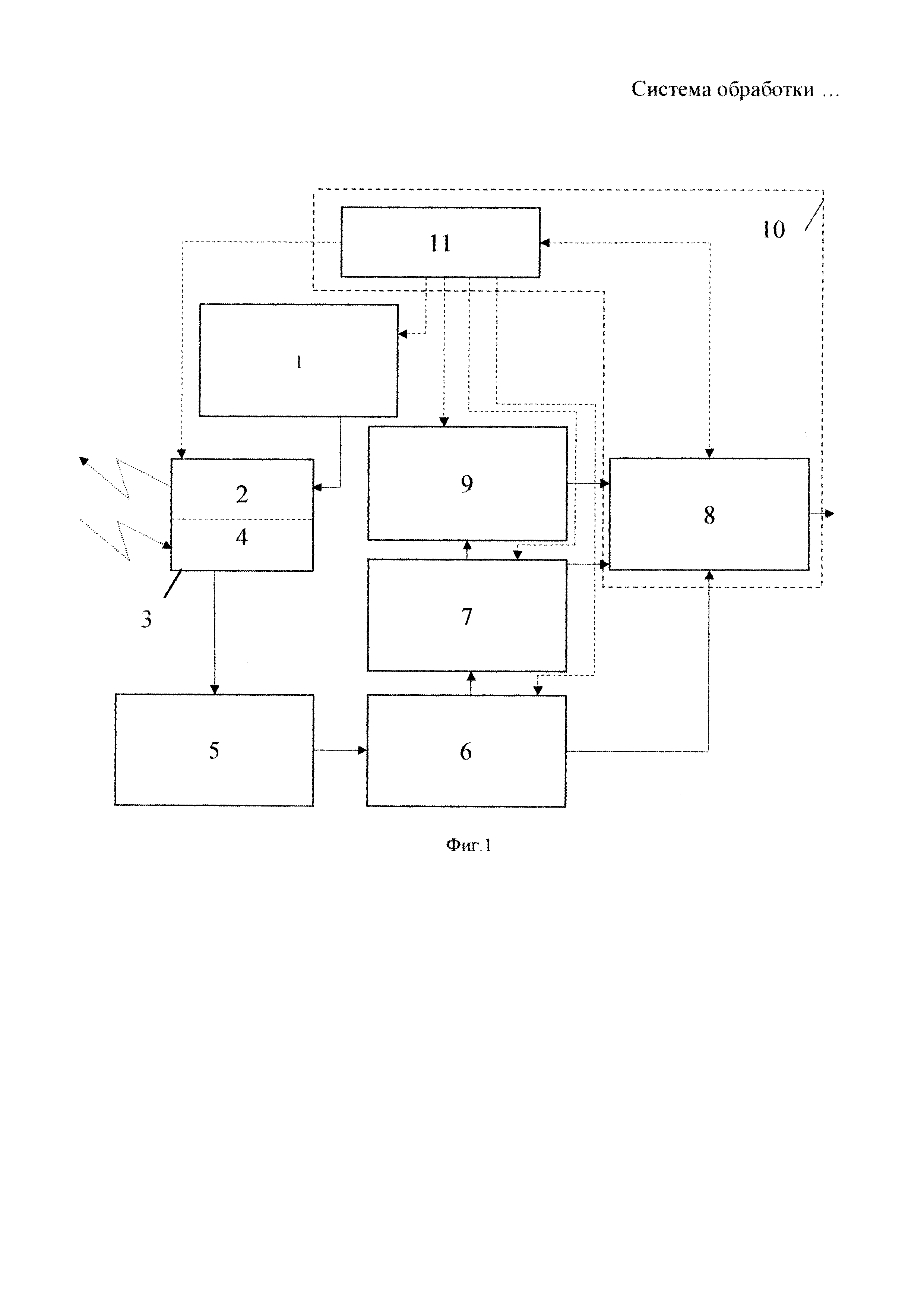
На фиг. 1 представлена укрупненная структурная схема заявленного изобретения, на фиг. 2 - функциональная схема устройства для расчета траекторных параметров групповых баллистических объектов, на фиг. 3 - матрица разбиения множества отметок на подмножества, на фиг. 4 - матрица, поясняющая принцип формирования подмножеств из множества элементов ГБО, представленного на примере фиг. 5.
Система цифровой обработки радиолокационной информации содержит устройство 1 формирования зондирующих сигналов, соединенное по сигнальному выходу с входом передающей антенны 2 приемопередающего устройства 3. Приемная антенна 4 устройства 3 соединена через устройство 5 усиления и преобразования принимаемых сигналов с устройством 6 первичной обработки сигналов. Первый сигнальный выход устройства 6 соединен с сигнальным входом устройства 7 вторичной обработки информации, а второй сигнальный выход - с первым сигнальным входом устройства 8 отображения и связи с потребителем. Выход устройства 7 вторичной обработки информации по траекторным параметрам соединен непосредственно со вторым сигнальным входом устройства 8, а по информации текущего обзора - через устройство 9 для расчета траекторных параметров групповых баллистических объектов. Устройство 9 содержит последовательно соединенные блок 9.1 обработки радиолокационной информации обзора и блок 9.2 межобзорной обработки радиолокационной информации. Блок 9.1 обработки радиолокационной информации обзора по входу соединен со вторым выходом устройства 7 и содержит последовательно соединенные блок 9.1.1 разбиения множества отметок на подмножества и блок 9.1.2 ранжирования. Первый выход блока 9.1.2 соединен с первым входом 9.2.1 блока 9.2 непосредственно, а второй выход блока 9.1.2 через блок 9.1.3 расчета геометрических центров подмножеств - со вторым входом 9.2.2 блока 9.2 межобзорной обработки радиолокационной информации. Блок 9.2 в свою очередь содержит блок 9.2.3 отождествления подмножеств, запоминающее устройство 9.2.4 опорных точек траекторий и блок 9.2.5 вычисления траекторных параметров. При чем сигнальный вход 9.2.1 блока 9.2 через блок 9.2.3 соединен с первым входом запоминающего устройства 9.2.4, второй вход которого соединен со вторым входом блока 9.2. Выход запоминающего устройства 9.2.4 через блок 9.2.5 соединен с третьим входом устройства 8 отображения и связи с потребителем. Устройство 8 выполнено в виде дисплея, установленного на автоматизированном рабочем месте (АРМ) 10 оператора. АРМ 10 выполнено на основе промышленной электронной вычислительной машины (ЭВМ), снабженной пультом управления в виде наборного поля и ручного манипулятора типа «мышь».
Причем блок 9.1.1 разбиения множества отметок на подмножества выполнен в виде вычислителя матрицы (фиг. 3) распределения множества обнаруженных в течение текущего обзора отметок на подмножества из формулы расчета нечетких отношений принадлежности по координатам:

причем 
где μ(xi, xj) - функция принадлежности отметки xj тому же подмножеству, что и xj;
xi - обозначение перебираемых отметок текущего обзора в строках формируемой матрицы;
xj - обозначение перебираемых отметок текущего обзора в столбцах формируемой матрицы;
rвн - расстояние между перебираемыми отметками xi и xj;
rвнеш - расстояние между наиболее удаленными отметками;
Δ - систематическая ошибка определения координат (определяется по результатам испытаний).
Блок 9.1.2 ранжирования выполнен в виде цифрового формирователя ранжированной булевой матрицы (фиг. 4) по числу значащих функций μ(х) принадлежности с одновременным сжатием радиолокационной информации путем поглощения верхней по рангу строкой булевой матрицы нижних ее строк с единичной функцией принадлежности. При этом значащими функциями принадлежности являются функции, уровень значимости которых выше порога β, определяемого оператором АРМ. Функциям принадлежности, значение которых выше указанного порога, присваивается значение «1», значение которых ниже указанного порога «0».
Блок 9.1.3 расчета геометрических центров подмножеств выполнен в виде вычислителя геометрического центра по формулам:



где xi, yi, zi - координаты обнаруженных отметок подмножества в неподвижной геоцентрической системе координат;
xгц, yгц, zгц - координаты геометрического центра подмножества;
N - число отметок, отнесенных к подмножеству.
Блок 9.2.3 отождествления подмножеств выполнен в виде вычислителя наименьшего расстояния между эталонами выделенных на соседних обзорах подмножеств:

где  - эталон k-го подмножества текущего обзора;
- эталон k-го подмножества текущего обзора;
 - эталон
- эталон  подмножества предыдущего обзора;
подмножества предыдущего обзора;
K - количество выделенных на текущем обзоре подмножеств.
Запоминающее устройство 9.2.4 опорных точек траекторий выполнено с возможностью формирования и выдачи в блок 9.2.5 массива из опорных точек по находящимся на сопровождении траекториям.
Блок 9.2.5 вычисления траекторных параметров выполнен в виде вычислителя, реализующего метод восстановления кривой с помощью функции регуляризации по уравнению Кеплера. В данном блоке 9.2.5 реализован метод минимизации - метод наименьших квадратов, функция минимизации - сумма квадратов ошибок координат. Оптимизационным алгоритмом для метода наименьших квадратов выбран алгоритм Левенберга-Марквардта, функция минимизации:

где  ,
,  , - значения координат, полученные от запоминающего устройства 9.2.4,
, - значения координат, полученные от запоминающего устройства 9.2.4,
 ,
,  ,
,  - расчетное значение координат по алгоритму минимизации, t0 - метка времени первого обзора, Т - длительность наблюдения.
- расчетное значение координат по алгоритму минимизации, t0 - метка времени первого обзора, Т - длительность наблюдения.
 ,
,  ,
,  рассчитываются по уравнению Кеплера с применением численного интегрирования по формулам:
рассчитываются по уравнению Кеплера с применением численного интегрирования по формулам:

Аналогично:


где  ,
,  ,
,  - проекция скорости центра подмножества соответственно на оси х, у, z в момент времени t-dt, dt - шаг интегрирования по времени,
- проекция скорости центра подмножества соответственно на оси х, у, z в момент времени t-dt, dt - шаг интегрирования по времени,  - расстояние от объекта до центра Земли,
- расстояние от объекта до центра Земли,  - ускорение свободного падения для этого расстояния.
- ускорение свободного падения для этого расстояния.


где  - гравитационная постоянная,
- гравитационная постоянная,  - масса Земли.
- масса Земли.
Система обработки радиолокационной информации работает следующим образом.
При включении системы с АРМ 10 устройство 1 формирует зондирующие сигналы (ЗС), которые через передающую антенну 2 излучаются в воздушное пространство. Отраженные от воздушных объектов сигналы ЗС принимаются приемной антенной 4 и передаются в устройство 5 усиления и преобразования сигналов. Усиленные и преобразованные в цифровую форму отраженные ЗС передаются в устройство 6 первичной обработки сигналов. В устройстве 6 производится первичная обработка сигналов, включая фильтрацию, пороговую обработку, формирование радиолокационных отметок и определение координат радиолокационных отметок. Далее совокупность координат радиолокационных отметок в цифровой форме передается на устройство 8 отображения РЛИ АРМ 10 и на устройство 7 вторичной обработки информации. В устройстве 7 совокупность координат радиолокационных отметок преобразуется в траекторную информацию и передается на устройство 8 отображения. Одновременно в устройстве 7 производится накопление массива обнаруженных отметок за период обзора с возможностью отождествления отметок от одних и тех же радиолокационных целей. Результаты накопления передаются в блок 9.1.1 устройства 9 для расчета траекторных параметров групповых баллистических объектов. В блоке 9.1.1 в соответствии с выражениями (1,2) формируется матрица функции принадлежности обнаруженных отметок к одному подмножеству. Полученная матрица передается в блок 9.1.2 для ранжирования матрицы по рангу значащих функций принадлежности для каждого объекта. Значащими функциями принадлежности являются функции, уровень значимости которых выше порога β, определяемого оператором АРМ. Функциям принадлежности, значение которых выше указанного порога, присваивается значение «1», значение которых ниже указанного порога «0». Уровень порога значимости β оператором выбирается исходя из необходимой степени детализации и наличных вычислительных мощностей. Далее ранжированная матрица передается одновременно на блок 9.1.3 расчета геометрических центров подмножеств и блок 9.2.3 отождествления подмножеств. В блок 9.1.3 в соответствии с формулами (3-5) производится расчет геометрических центров выделенных подмножеств ГБО, а в блоке 9.2.3 отождествление подмножеств в соответствии с формулой (6). Результаты вычислений в блоке 9.1.3 и в блоке 9.2.3 передаются в запоминающее устройство (ЗУ) 9.2.4. В ЗУ 9.2.4 производится запоминание опорных точек траекторий находящихся на сопровождении подмножеств отметок от ГБО. Затем данные с ЗУ 9.2.4 передаются на блок 9.2.5. В блоке 9.2.5 производится вычисление траекторных параметров в соответствии с формулами (7-12). Результаты вычислений блока 9.2.5 передаются на устройство 8 отображения АРМ 10. Оператор АРМ 10, наблюдая за результатами отображения информации с устройства 7 и 9, принимает решение на передачу адекватной РЛИ потребителю через соответствующие средства связи.
Система обработки радиолокационной информации выполнена на уровне стендовой модели и программно-алгоритмического обеспечения ее функционирования. При моделировании системы оценивалось отклонение центра рассеяния рассчитанных точек падения элементов ГБО в различных условиях зашумленности и вероятность образования ложных трасс.
Результаты моделирования показали возможность уменьшения среднеквадратического отклонения центра рассеяния рассчитанных точек падения элементов ГБО не менее чем на 10-15% и снижения вероятности образования ложных трасс не менее чем в 2-4 раза.
Источники информации
1. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986. с. 17.
2. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: «Сов. радио», 1974. 432 с.
3. Справочник по радиолокации. Под ред. М. Сколника. Пер. с англ. (в четырех томах) под общей ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. М., «Сов. радио», 1976, с. 21.
4. Справочник по радиолокации. Под ред. М. Сколника, т. 2. - М., Сов. радио, 1977, с. 141-143.
5. Горелик A.M. и др. Методы распознавания. - М.: Высшая школа, 1984.
6. Селекция и распознавание на основе локационной информации. /Под ред. А.Л. Горелика. - М.: Радио и связь, 1990.
7. А. Фарина, Ф. Студер. Цифровая обработка радиолокационной информации. Сопровождение целей. - М., Радио и связь, 1993, с. 25-30.
8. Фомин Я.А., Савич А.В. Оптимизация распознающих систем. -М.: Машиностроение, 1993.
9. A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. Военное издательство, 1967, с. 278-279.
10. Шишов Ю.А. и др. Многоканальная радиолокация с временным разделением каналов. - М.: Радио и связь, 1987, с. 114.
11. Жаков A.M., Пигулевский Ф.А. Управление баллистическими ракетами. - М.: Воениздат, 1965.
12. Кобызев И.Н. Мера разрешения радиолокационных сигналов по одному параметру. Зарубежная радиоэлектроника. 1992, №10, с. 94-96.
13. Способ определения количества разрешаемых воздушных целей в группе. RU 2080617 С1, 27.05.1997.
14. Способ определения параметров групповой цели для ее обстрела. RU 2399853, 20.09.2010.
15. Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории. RU 2524208, 27.07.2014.
16. Способ обнаружения групповой цели. RU 2597887, 20.09.2016.
17. Способ обнаружения групповой цели. RU 2106653 от 10.03.1998.
18. Способ обнаружения групповой цели. RU 2298806, 10.10.2005.
19. Способ определения количества целей в группе. RU 2260196, 2004.
20. Способ распознавания класса воздушной цели. RU 2150715, 10.06.2000.
21. Способ разрешения групповой цели. RU 2407034, 20.12.2010.
22. Способ радиолокационного обнаружения траектории объекта, отделившегося от объекта-носителя. RU 2345383, 27.01.2009.
23. Способ определения числа разрешаемых воздушных целей в группе. RU 2158005 С1, 20.10.2000.
24. Способ радиолокационного обнаружения и сопровождения объектов. RU 2137152 С1, 10.09.1999.
25. Многодиапазонный радиолокационный комплекс. RU 2346291, 10.02.2009.
26. Радиолокационный комплекс для обнаружения и сопровождения объектов (варианты) и РЛС для его реализации. RU 2145093, 27.01.2000.
27. Научно-исследовательская модель прогнозирования вариантов построения ударов крылатыми ракетами. RU 161982, 20.05.2016.
28. Способ и система для анализа баллистических траекторий. US 9342907, 17.05.2016.
29. Method of counting multiple targets in the post detection processing of a radar. US 4536764 от 20.08.85.
30. Method of detection and tracking of moving objects by analysis of sequences of images. EP 0530088 A1, 03.03.1993.
31. Method of detecting and tracking a target, particularly a flying missile FR 2661738, 08.11.1991.
32. Method for predicting skipping trajectory of hypersonic glide warhead in near space. CN 104778376. 2015-07-15.
33. Strategic ballistic missile early-warning radar as well as defense system and control method using it. №08320374, 1996-12-03.
34. Ballistic missile debris mitigation. US 9140784, 2015-09-22.
Способ навигационных астрономических измерений координат местоположения подвижного объекта и устройство для его реализации
Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех
Способ обработки льняной соломы для получения льноволокна
Способ очистки скандия от тория
Способ определения скорости движущихся объектов методом пассивной локации
Способ пассивной дистанционной телевизионной идентификации объектов и устройство для его осуществления
Глубокорыхлитель мульчирователь
Способ идентификации типа самолета средствами пассивной оптической локации и устройство для его осуществления
Система обработки радиолокационной информации
Цифровое устройство определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса

