Результат интеллектуальной деятельности: Адаптивная система с эталонной моделью для управления летательным аппаратом
Вид РИД
Изобретение
Изобретение относится к бортовым системам автоматического управления летательными аппаратами, которые применяются в широком диапазоне условий полета.
Известны адаптивные системы управления летательными аппаратами (ЛА), содержащие задатчик пробного сигнала, датчик угла, датчик угловой скорости и суммирующий усилитель, формирующий по задающим воздействиям и сигналам датчиков состояния, управляющие воздействия на рулевые приводы летательного аппарата, а также эталонную модель (ЭМ) с желаемыми динамическими характеристиками, блок формирования разностного сигнала между выходными сигналами ЛА и ЭМ и блок алгоритмов самонастройки [1].
Наиболее близким к предлагаемому техническому решению является «Самонастраивающийся автопилот» (Авторское свидетельство на изобретение №536646 от 28.07.1976, дата подачи заявки 30.05.1975) [2], содержащий последовательно соединенные сумматор, на первый вход которого подается сигнал управления летательным аппаратом, первый блок умножения, реализующий переменное передаточное число по позиционному и демпфирующему сигналам, рулевой привод и летательный аппарат с датчиком угла, датчиком угловой скорости, выходы которых подключены соответственно к первому и второму входам корректирующего звена, соединенного со вторым входом сумматора, и датчиком линейного ускорения, цепь из последовательно соединенных эталонной модели, блока сравнения, блока алгоритмов самонастройки и первого интегратора, подключенную между первым входом сумматора и вторым входом первого блока умножения, причем выход сумматора подключен также ко второму входу блока алгоритмов самонастройки, третий вход которого соединен с выходом датчика линейного ускорения, при этом второй и третий входы блока сравнения соединены с выходами датчика угла и датчика угловой скорости соответственно, а также последовательно соединенные второй интегратор и второй блок умножения, подключенные между вторым выходом блока алгоритмов самонастройки и вторым входом рулевого привода, при этом выход датчика угловой скорости соединен также с входом однокоординатного корректирующего звена, которое подключено выходом к третьему входу рулевого привода и реализует постоянное передаточное число по обводному сигналу демпфирования, а выход датчика линейного ускорения соединен со вторым входом второго блока умножения, реализующего переменное передаточное число по сигналу линейного ускорения.
Существенными признаками прототипа, совпадающими с существенными признаками предлагаемого технического решения, являются следующие: устройство содержит последовательно соединенные сумматор, на первый вход которого подается сигнал управления летательным аппаратом, и первый блок умножения, реализующий переменное передаточное число по позиционному и демпфирующему сигналам, а также рулевой привод и летательный аппарат с датчиком угла, датчиком угловой скорости, выходы которых подключены соответственно к первому и второму входам корректирующего звена, соединенного со вторым входом сумматора, и датчиком линейного ускорения, цепь из последовательно соединенных эталонной модели, блока сравнения, блока алгоритмов самонастройки и первого интегратора, подключенную между первым входом сумматора и вторым входом первого блока умножения, причем выход сумматора подключен также ко второму входу блока алгоритмов самонастройки, третий вход которого соединен с выходом датчика линейного ускорения, при этом второй и третий входы блока сравнения соединены с выходами датчика угла и датчика угловой скорости соответственно, а также последовательно соединенные второй интегратор, подключенный входом ко второму выходу блока алгоритмов самонастройки, и второй блок умножения, реализующий переменное передаточное число по сигналу линейного ускорения, при этом выход датчика линейного ускорения соединен со вторым входом второго блока умножения.
Недостатком известного устройства является снижение функциональных возможностей системы управления из-за отсутствия средств адаптации передаточных чисел к изменению аэродинамического демпфирования ЛА в обводном канале по сигналу демпфирования, т.к. стоящее в этой цепи корректирующее звено реализует постоянное передаточное число. Это приводит к снижению качества адаптации и по двум другим - перестраиваемым - передаточным числам системы, а также к снижению качества управления летательным аппаратом при изменении условий полета, например при изменении скорости и (или) высоты полета ЛА.
Решаемой в предложенном устройстве технической задачей является расширение его функциональных возможностей за счет введения контура адаптации к изменению аэродинамического демпфирования ЛА также и в обводном канале по сигналу демпфирования.
Указанный технический результат достигается тем, что в известное устройство - самонастраивающийся автопилот с эталонной моделью, содержащее последовательно соединенные сумматор, на первый вход которого подается сигнал управления летательным аппаратом, и первый блок умножения, реализующий переменное передаточное число по позиционному и демпфирующему сигналам, а также рулевой привод и летательный аппарат с датчиком угла, датчиком угловой скорости, выходы которых подключены соответственно к первому и второму входам корректирующего звена, соединенного со вторым входом сумматора, и датчиком линейного ускорения, цепь из последовательно соединенных эталонной модели, блока сравнения, блока алгоритмов самонастройки и первого интегратора, подключенную между первым входом сумматора и вторым входом первого блока умножения, причем выход сумматора подключен также ко второму входу блока алгоритмов самонастройки, третий вход которого соединен с выходом датчика линейного ускорения, при этом второй и третий входы блока сравнения соединены с выходами датчика угла и датчика угловой скорости соответственно, а также последовательно соединенные второй интегратор, подключенный входом ко второму выходу блока алгоритмов самонастройки, и второй блок умножения, реализующий переменное передаточное число по сигналу линейного ускорения, при этом выход датчика линейного ускорения соединен со вторым входом второго блока умножения, дополнительно введены последовательно соединенные третий интегратор и третий блок умножения, реализующий переменное передаточное число по сигналу демпфирования в обводном канале, подключенные между третьим выходом блока алгоритмов самонастройки и третьим входом рулевого привода, при этом выход датчика угловой скорости соединен также со вторым входом третьего блока умножения.
Отличительными признаками предлагаемого технического решения является то, что адаптивная система с эталонной моделью для управления летательным аппаратом дополнительно содержит последовательно соединенные третий интегратор и третий блок умножения, причем вход третьего интегратора подключен к третьему выходу блока алгоритмов самонастройки, а также второй сумматор, первый, второй и третий входы которого соединены с выходами первого, второго и третьего блоков умножения соответственно, а выход - со входом рулевого привода, причем ко второму входу третьего блока умножения подключен выход датчика угловой скорости.
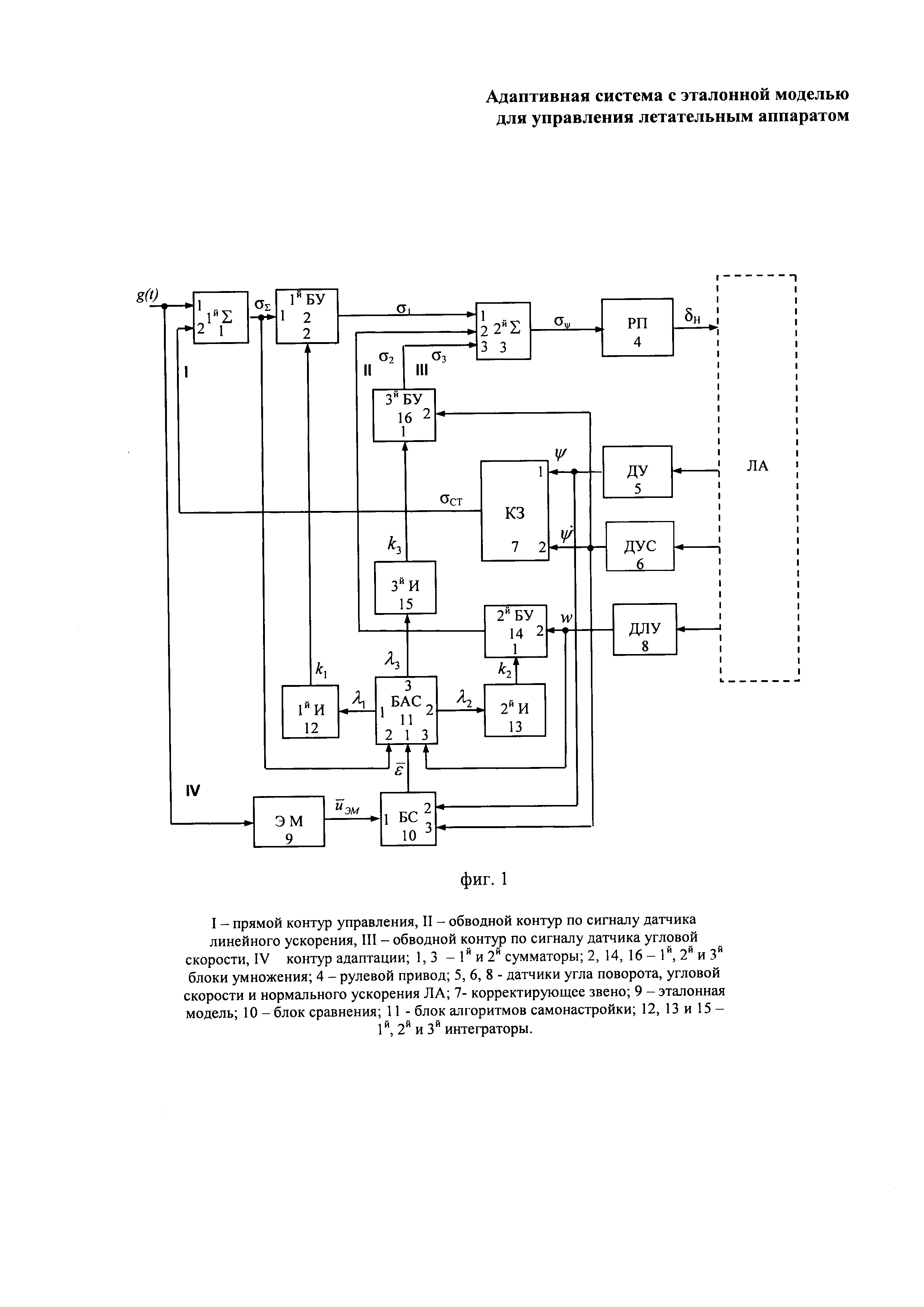
Предлагаемое техническое решение поясняется примером структурной схемы адаптивной системы с эталонной моделью для управления летательным аппаратом в канале курса (фиг. 1).
Эта система представляет собой четыре взаимосвязанных контура:
I - прямой контур управления - содержит последовательно соединенные первый сумматор 1 (1й Σ), на первый вход которого подается сигнал управления летательным аппаратом, первый блок умножения 2 (1й БУ), второй сумматор 3 (2й Σ), рулевой привод 4 (РП) и летательный аппарат с датчиком угла 5 (СГ), датчиком угловой скорости 6 (ДУС), выходы которых подключены соответственно к первому и второму входам корректирующего звена 7 (КЗ), подключенного выходом ко второму входу первого сумматора 1;
II - обводной контур по сигналу датчика линейного ускорения - содержит этот датчик 8 (ДЛУ), второй блок умножения 14 (2й БУ), второй сумматор 3, рулевой привод 4 и летательный аппарат;
III - обводной контур по сигналу датчика угловой скорости - содержит этот датчик 6, третий блок умножения 16 (3й БУ), второй сумматор 3, рулевой привод 4 и летательный аппарат;
IV - контур адаптации - содержит датчики угла 5 и угловой скорости 6, цепь из последовательно соединенных эталонной модели 9 (ЭМ), блока сравнения 10 (БС), блока алгоритмов самонастройки 11 (БАС) и первого интегратора 12 (1й И), подключенную между первым входом первого сумматора 1 и вторым входом первого блока умножения 2, причем выход первого сумматора 1 подключен также ко второму входу блока алгоритмов самонастройки 11, третий вход которого соединен с выходом датчика линейного ускорения 8, при этом второй и третий входы блока сравнения 10 соединены с выходами датчика угла 5 и датчика угловой скорости 6 соответственно, а также цепь из последовательно соединенных второго интегратора 13 (2й И) и второго блока умножения 14, подключенную между вторым выходом блока алгоритмов самонастройки 11 и вторым входом второго сумматора 3, при этом выход датчика линейного ускорения 8 соединен со вторым входом второго блока умножения 14, и третий интегратор 15 (3й И), вход которого подключен к третьему выходу блока алгоритмов самонастройки 11, а выход - ко второму входу третьего блока умножения 16.
Летательный аппарат (ЛА) на фиг. 1 показан условно.
На схеме (фиг. 1) введены обозначения:
g(t) - сигнал управления летательным аппаратом;
σΣ - выходной сигнал первого сумматора;
σ1, σ2, σ3 - выходные сигналы первого, второго и третьего блоков умножения;
σψ - сигнал управления каналом курса летательного аппарата;
δH - угол отклонения руля направления;
ψ,  , w - сигналы угла курса, угловой скорости по курсу и линейного ускорения в канале курса;
, w - сигналы угла курса, угловой скорости по курсу и линейного ускорения в канале курса;
σСТ - сигнал стабилизации канала курса;
λ1, λ2, λ3 - выходные сигналы блока алгоритмов самонастройки на входах первого, второго и третьего интеграторов;
 ,
,  - векторы выходных параметров эталонной модели и блока сравнения;
- векторы выходных параметров эталонной модели и блока сравнения;
k1, k2, k3 - перестраиваемые коэффициенты передачи адаптивной системы.
Адаптивная система с эталонной моделью для управления летательным аппаратом работает следующим образом.
Как известно, уравнения движения ЛА в канале курса представляются уравнениями вида [3, с. 34]:
которые здесь записаны, для простоты, для идеальных передаточных функций датчиков угла, угловой скорости, линейного ускорения и рулевого привода; предполагается также, что датчик линейного ускорения расположен в центре масс ЛА.
В уравнениях (1) β, ψ, ϕ, δн - соответственно углы скольжения, рыскания, курсовой угол и угол отклонения руля направления;
w - линейное ускорение вдоль боковой оси oz1 связанной системы координат;
V - скорость полета ЛА;
b1…b5 - динамические коэффициенты, определяемые по формулам
 ;
;  ;
;  ;
;  ;
;  ;
;
iн, ρн - постоянные коэффициенты передачи, определяющие соотношение сигналов свободного и демпфирующего гироскопов в контуре угловой стабилизации ЛА по курсу;
k1, k2, k3 - коэффициенты передачи САУ, перестраиваемые контуром самонастройки;
 ,
,  ,
,  ,
,  ,
,  - аэродинамические коэффициенты ЛА в канале курса, остальные обозначения общеприняты.
- аэродинамические коэффициенты ЛА в канале курса, остальные обозначения общеприняты.
Управляющий сигнал g(t) подается одновременно на входы первого сумматора 1 и эталонной модели 9. Воздействие этого сигнала через цепь, состоящую из первого сумматора 1, первого блока умножения 2 и второго сумматора 3, отрабатывается рулевым приводом 4, отклоняющим руль направления на угол δH, и затем летательным аппаратом.
На второй вход сумматора 1 подается сигнал стабилизации канала курса - выходной сигнал корректирующего звена 7, сформированный по закону
 ,
,
На первый вход второго сумматора 3 подается выходной сигнал сумматора σΣ, умноженный в первом блоке умножения 2 на перестраиваемый коэффициент передачи k1; При этом σΣ=g+σСТ.
На второй и третий входы второго сумматора 3 подаются также выходной сигнал w датчика линейных ускорений 8, умноженный во втором блоке умножения 14 на перестраиваемый коэффициент передачи k2, и сигнал  угловой скорости ЛА с выхода датчика 6, умноженный в третьем блоке умножения 16 на перестраиваемый коэффициент передачи k3 обводного контура демпфирования. Таким образом, рулевой привод отрабатывает сигнал управления каналом курса
угловой скорости ЛА с выхода датчика 6, умноженный в третьем блоке умножения 16 на перестраиваемый коэффициент передачи k3 обводного контура демпфирования. Таким образом, рулевой привод отрабатывает сигнал управления каналом курса

Векторный выходной сигнал  эталонной модели 9, в которой заложены желаемые динамические характеристики, содержит компоненты, аналогичные углу и угловой скорости ЛА. В блоке сравнения 10 этот сигнал сравнивается с сигналами ψ свободного гироскопа 5 и
эталонной модели 9, в которой заложены желаемые динамические характеристики, содержит компоненты, аналогичные углу и угловой скорости ЛА. В блоке сравнения 10 этот сигнал сравнивается с сигналами ψ свободного гироскопа 5 и  - датчика угловых скоростей 6.
- датчика угловых скоростей 6.
Выходной векторный сигнал блока сравнения 10  , содержащий ошибки сравнения сигналов эталонной модели и ЛА по углу и по угловой скорости, вместе с сигналами сумматора 1 σΣ и датчика линейных ускорений 8 w поступают на вход блока алгоритмов самонастройки 11. Блок 11 формирует сигналы для перестройки коэффициентов передачи k1, k2 и k3.
, содержащий ошибки сравнения сигналов эталонной модели и ЛА по углу и по угловой скорости, вместе с сигналами сумматора 1 σΣ и датчика линейных ускорений 8 w поступают на вход блока алгоритмов самонастройки 11. Блок 11 формирует сигналы для перестройки коэффициентов передачи k1, k2 и k3.
Алгоритмы формирования коэффициентов передачи k1, k2 и k3 в зависимости от изменения динамических характеристик ЛА для адаптивной системы рассматриваемой структуры изложены, например, в [3, с. 122]:

где χ1, χ2 - выбираемые настроечные параметры, задающие желаемое качество переходных процессов эталонной модели.
При этом передаточная функция летательного аппарата, охваченного контурами САУ, как показано в [3, с. 121…124], становится независимой от динамических параметров самого ЛА:

Алгоритмы самонастройки, реализуемые в блоках 9, 10, 11, представлены, например, в [3, с. 124], [4, с. 108…118], алгоритмы настройки коэффициентов k1, k2, k3 могут иметь вид


где ε1, ε2 - ошибки сравнения сигналов с эталонной модели и объекта управления.
Компоненты сигнала на выходе блока алгоритмов самонастройки 11 подаются: компонента λ1 - на первый интегратор 12, компонента λ2 - на второй интегратор 13, а компонента λ3 - на третий интегратор 15. Выходной сигнал первого интегратора и есть параметрическое воздействие (перестраиваемый коэффициент передачи) k1, которое поступает на первый блок умножения 2, выходной сигнал второго интегратора - это параметрическое воздействие (перестраиваемый коэффициент передачи) k2, поступающее на второй блок умножения 14, а выходной сигнал третьего интегратора - параметрическое воздействие (перестраиваемый коэффициент передачи) k3, поступающее на третий блок умножения 16. В результате сигнал управляющего воздействия g(t) отрабатывается летательным аппаратом с желаемым качеством динамического переходного процесса.
Таким образом, адаптивная система с эталонной моделью для управления летательным аппаратом отличается тем, что с целью обеспечения параметрической инвариантности динамических характеристик замкнутой системы САУ - ЛА в широком диапазоне изменения параметров ЛА, в том числе и собственного аэродинамического демпфирования ЛА, в нее введены
- второй сумматор,
- третий интегратор и третий блок умножения.
Проведенные многочисленные исследования, проведенные методами математического и полунатурного моделирования, подтвердили существенное улучшение динамических характеристик системы САУ - ЛА при применении представленной здесь системы. Особо следует отметить способность предложенной САУ поддерживать требуемые параметры системы в достаточно широком диапазоне изменения собственной устойчивости ЛА за счет изменения его центровки.
Источники информации
1. Блейклок Дж.Г. Автоматическое управление самолетами и ракетами. М., «Машиностроение», 1969, с. 222.
2. Петров Б.Н., Рутковский В.Ю., Абадеев Э.М., Пучков A.M. и др. Самонастраивающийся автопилот. Авторское свидетельство на изобретение №536646. 1976 (прототип).
3. Абадеев Э.М, Балыко Ю.П., Ляпунов В.В., Обносов Б.В., Трусов В.Н. Основы формирования облика систем управления авиационного ракетного вооружения. М.: «Дашков и К°». 2012.
4. Петров Б.Н., Рутковский В.Ю. и др. Принципы построения и проектирования самонастраивающихся систем управления. М.: Машиностроение. 1973.
Адаптивная система с эталонной моделью для управления летательным аппаратом, содержащая последовательно соединенные первый сумматор, на первый вход которого подается сигнал управления летательным аппаратом, и первый блок умножения, а также рулевой привод, датчик угла, датчик угловой скорости, выходы которых подключены соответственно к первому и второму входам корректирующего звена, а выход корректирующего звена соединен с вторым входом первого сумматора, датчик линейного ускорения, цепь из последовательно соединенных эталонной модели, блока сравнения, блока алгоритмов самонастройки и первого интегратора, подключенную между первым входом первого сумматора и вторым входом первого блока умножения, при этом выход первого сумматора подключен также ко второму входу блока алгоритмов самонастройки, третий вход блока алгоритмов самонастройки соединен с выходом датчика линейного ускорения, второй и третий входы блока сравнения соединены с выходами датчика угла и датчика угловой скорости соответственно, и последовательно соединенные второй интегратор, подключенный входом ко второму выходу блока алгоритмов самонастройки, и второй блок умножения, причем выход датчика линейного ускорения соединен со вторым входом второго блока умножения, отличающаяся тем, что она содержит последовательно соединенные третий интегратор и третий блок умножения, причем вход третьего интегратора подключен к третьему выходу блока алгоритмов самонастройки, и второй сумматор, первый, второй и третий входы которого соединены с выходами первого, второго и третьего блоков умножения соответственно, а выход - с входом рулевого привода, при этом ко второму входу третьего блока умножения подключен выход датчика угловой скорости.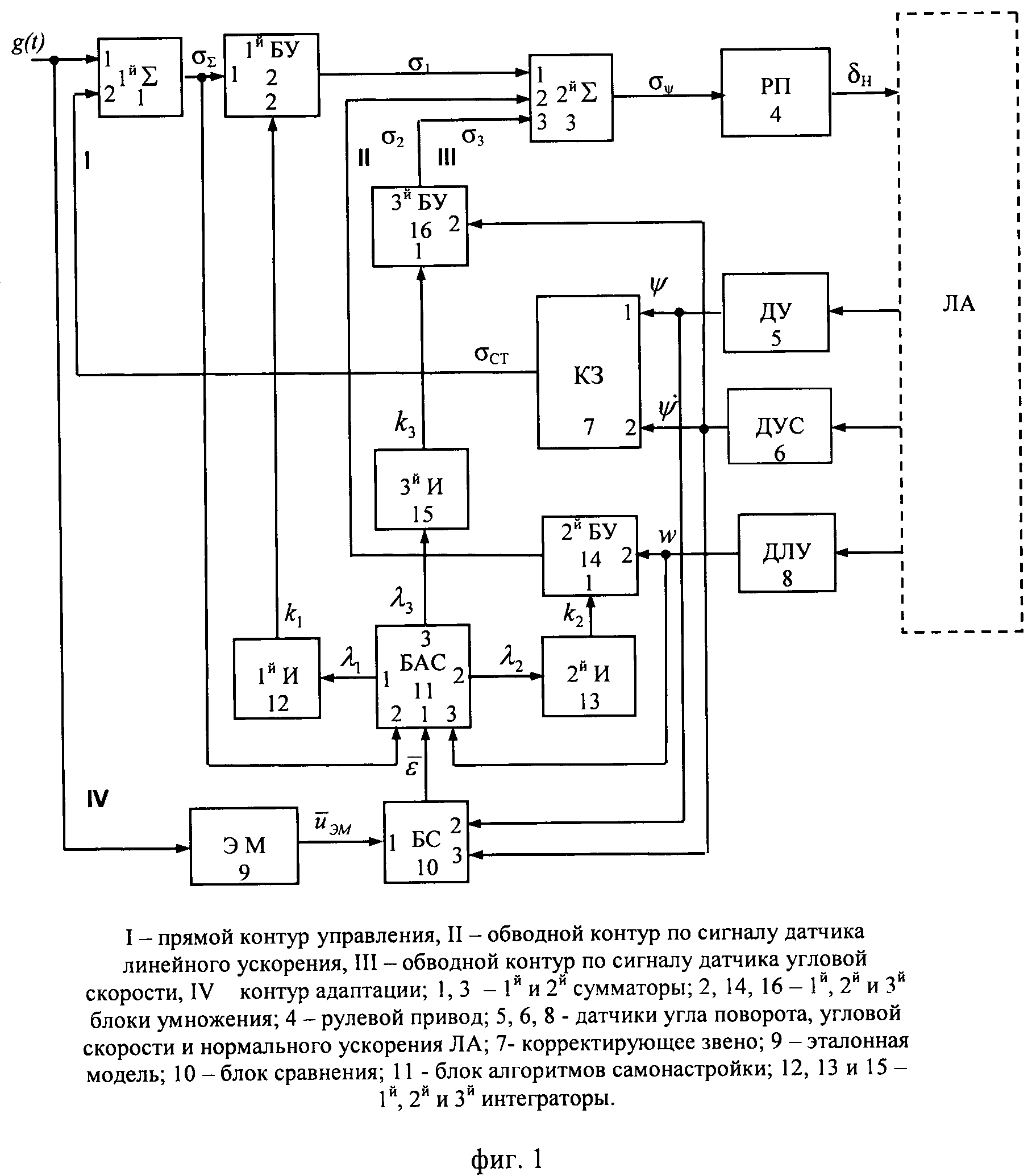
Способ для отбора пленок нефти и нефтепродуктов с поверхности воды и устройство для его осуществления
Способ получения пленок теллурида кадмия магнетронным распылением на постоянном токе
Генератор амплитудно-модулированных сигналов
Способ изготовления базовых слоев гибких фотоэлектрических преобразователей на основе cdte в квазизамкнутом объеме
Устройство для отбора пленок нефти и нефтепродуктов с поверхности воды
Силовой преобразователь
Стенд для испытаний и калибровки датчиков массового расхода воздуха автомобилей
Способ получения мицеллярных комплексов меди (ii) с использованием неионогенных поверхностно-активных веществ (пав)
Способ формирования адаптивного сигнала управления и стабилизации углового движения летательного аппарата и устройство для его осуществления
Способ формирования интегрального сигнала управления для систем автоматического регулирования и устройство для его осуществления
Способ интегрирования сигнала управления для астатических систем управления летательными аппаратами и устройство для его осуществления
Бортовая цифроаналоговая адаптивная система управления летательным аппаратом
Бортовая цифроаналоговая адаптивная система управления движением летательного аппарата по крену
Адаптивная система управления высотой полета летательного аппарата
Способ формирования сигнала управления боковым движением летательного аппарата и устройство для его осуществления

