Результат интеллектуальной деятельности: СПОСОБ ПОМОЩИ ВОДИТЕЛЯМ ПРИ ПЕРЕСТРОЕНИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области автотранспорта, а именно к средствам оснащения наземного автотранспорта и автомагистралей, и может быть использовано для повышения безопасности дорожного движения в качестве средства помощи водителям транспортных средств при выполнении маневров перестроений на многополосных трассах.
Известны технические решения, в которых контроль зоны перестроения обеспечивается водителем визуально в пределах передней полусферы непосредственно, а в задней полусфере с помощью боковых зеркал и зеркала заднего вида, например, «Wide angle substantially non-distorting mirror» (patent US 8180606 B2; prior publication data US 2010/0033854 A1 Feb, 11, 2010; date of patent May, 15.2012; Current International Class: G06F 7/60 (20060101)).
При использовании подобных средств водителю при перестроениях приходится серьезно отвлекаться от фронтального контроля дорожной обстановки, появляются "слепые" неконтролируемые зоны, имеет место искажение воспринимаемых расстояний до других транспортных средств, водителю приходится интуитивно решать динамические задачи расхождения транспортных средств, что нередко приводит к стрессовым ситуациям у водителей и к ошибкам управления, приводящим к конфликтным ситуациям на дороге и к авариям. Максимальное расстояние, на котором визуально различимы элементы линий разметки полос движения, даже при благоприятных условиях составляет до 50 метров. Таким образом, при использовании данного способа управления транспортным средством оценку безопасности возможных перестроений осуществляет водитель транспортного средства с визуальным и интеллектуальным отвлечением от контроля фронтальной дорожной обстановки, а при скоростях транспортных потоков выше 80-100 км/час еще и в условиях неполной информации о дорожной обстановке.
Известны технические решения, в которых для предотвращения дорожных инцидентов производят дополнительное оборудование магистралей, например, «Способ обеспечения безопасности дорожного движения» (патент RU 2469890, МПК B60W, G01C, G08G, опубл. 20.04.2012). Согласно указанному способу в окрестностях трассы размещают не менее трех вышек с радиопередатчиками, с известными трехмерными координатами, сигналы которых синхронизируют с помощью оптоволоконного кабеля, связывающего радиопередатчики. Каждое транспортное средство оборудуют двумя навигационными блоками, разнесенными вдоль его продольной оси. Навигационным блоком также оснащают каждого пешехода. По временной разнице радиосигналов от передатчиков, приходящих на навигационные блоки определяют трехмерные координаты своих носителей, а для каждого транспортного средства еще и ориентацию его продольной оси. Способ предполагает также размещение информационно-вычислительных комплексов, которые принимают по радиоканалу от навигационных блоков указанные данные, обрабатывает их с учетом трехмерной цифровой модели трассы и в случаях прогнозирования наездов на пешеходов или схождения транспортных средств со своих полос движения по радиоканалу передают предупреждения соответствующим объектам.
Адаптировать рассмотренное техническое решение для обеспечения безопасности перестроений посредством разработки соответствующего программного обеспечения из-за недостаточной точности определения координат транспортных средств, вряд ли, возможно. Кроме того, рассмотренный способ сложен, дорог и потенциально ненадежен в реализации и эксплуатации. К тому же, тройной обмен сигналами в системе, а также программная обработка данных о дорожных ситуациях приводит к существенным задержкам предупреждений о возможных столкновениях, что недопустимо в задаче обеспечения безопасности перестроений транспортных средств в связи с динамично меняющейся дорожной обстановкой.
Наиболее близким к заявляемому способу из числа известных технических решений является «Способ и система повышения безопасности управления транспортным средством» (заявка на патент на изобретение PCT/RU 2011/000686 от 24.09.2010, МПК B60R 1/00, G02B 27/18, номер публ. WO 2012039648 A1 от 29.03.2012). В способе-прототипе назначают желаемый маневр: поворот, разворот, перестроение или начало движения транспортного средства. После этого получают информацию о дорожной ситуации в области совершения маневра транспортным средством, формируют данные о направлении и расстоянии до соседних транспортных средств и выводят их на лобовое стекло транспортного средства.
Физическое предшествование назначения маневра, например, в виде нажатия водителем соответствующей кнопки, выводу на лобовое стекло необходимой информации о дорожной обстановке, приводит к относительно длительному визуальному и интеллектуальному отвлечению водителя от фронтального управления транспортным средством в связи с необходимостью выбора подходящего момента для фактического начала реализации перестроения, что повышает риски совершения фронтальных столкновений и наездов. Вывод информации о дорожной обстановке в виде направлений и расстояний до других транспортных средств, то есть в содержательно непрепарированной форме, приводит к высокому нервному напряжению и ошибкам водителя в оценках динамичных дорожных ситуаций, что усугубляет указанные опасности. Использование указанных в способе-прототипе датчиков первичной информации о дорожной обстановке ограничивает радиус зоны наблюдения элементов разметки полос движения до 50 метров даже при самых благоприятных метеоусловиях и хорошей освещенности трассы. Таким образом, и при использовании способа-прототипа управления транспортным средством оценку безопасности возможных перестроений осуществляет водитель транспортного средства с визуальным и интеллектуальным отвлечением от контроля фронтальной дорожной обстановки, а при скоростях транспортных потоков выше 80-100 км/час еще и в условиях неполной информации о дорожной обстановке.
Наиболее близкой к заявляемой системе из числа известных технических решений является «Способ и система повышения безопасности управления транспортным средством» (заявка на патент на изобретение PCT/RU 2011/000686 от 24.09.2010, МПК B60R 1/00, G02B 27/18, номер публ. WO 2012039648 A1 от 29.03.2012).
Система-прототип содержит узлы получения информации (УПИ), в частности, видеокамеры, ультразвуковые датчики, лазерные дальномеры, обрабатывающие блоки (ОБ) для определения направлений и расстояний до соседних транспортных средств, устройства формирования изображений (УФИ) на лобовом стекле транспортного средства и датчики управления (ДУ) для восприятия намерений водителя, в частности, кнопки, датчики включения световых сигналов поворота, датчики поворота рулевого колеса на заданный угол, датчики прикосновения, системы распознавания речи. При этом УПИ взаимосвязаны с ОБ, УФИ и подключены к ОБ, ОБ подключены к ДУ, кроме того, система выполнена с возможностью получения сигналов в ОБ от УПИ, передачи сигналов от ОБ в УФИ, а также передачи сигналов от ДУ к ОБ и восприятия в ДУ действий оператора, направленных на начало совершения маневра поворота, разворота, перестроения или начала движения.
При использовании системы-прототипа для управления транспортным средством оценку безопасности возможных перестроений также осуществляет водитель транспортного средства с визуальным и интеллектуальным отвлечением от контроля фронтальной дорожной обстановки, а при скоростях транспортных потоков выше 80-100 км/час еще и в условиях неполной информации о дорожной обстановке.
Следует учитывать, что на многополосной трассе с разделительными сооружениями между разнонаправленными ее полотнами для безопасного маневра перестроения транспортного средства на соседнюю полосу движения влево или вправо его водитель должен контролировать в пределах зоны безопасности своего транспортного средства дорожную обстановку на трех полосах: текущей полосе своего движения, целевой полосе движения и следующей полосе в сторону перестроения. В пределах указанного пространства могут перемещаться другие транспортные средства с намерениями перестроения на ту же полосу и в то же время, причем без предварительного обозначения своих намерений световыми сигналами. В практике вождения автотранспорта безопасной дистанцией между транспортными средствами в транспортном потоке считается расстояние, численно равное половине скорости транспортного потока и выраженное в метрах [1].
Задачей настоящего изобретения является автоматизация процесса оценки безопасности возможных перестроений транспортного средства на многополосных магистралях во всем диапазоне реально возможных скоростей транспортных потоков, при любых метеоусловиях, в любое время суток, без визуального и интеллектуального отвлечения водителя от контроля фронтальной дорожной обстановки.
Техническим результатом решения указанной задачи является повышение безопасности совершения маневров перестроений транспортных средств.
Технический результат достигается тем, что способ помощи водителям при перестроениях, в котором на каждом транспортном средстве получают информацию о дорожной ситуации в окружающем транспортное средство пространстве, в частности, регистрируют СВЧ-излучение от других транспортных средств на трассе и отображают указанную информацию на лобовом стекле транспортного средства в воспринимаемой человеком форме, дополняют следующими действиями:
- предварительно в линиях ограничения дорожного полотна и в пунктирных линиях разделения полос движения под слоем дорожной краски с шагом пунктирной разметки размещают пассивные транспондеры, содержащие данные о направлении, граничности и номере примыкающей слева полосы движения,
- формируют на всю трассу синхронизирующее электромагнитное поле, модулированием которого обозначают циклически повторяющиеся две серии временных квантов, каждая из которых соответствует своему направлению движения на трассе, а каждый временной квант соответствует своей полосе движения,
на каждом транспортном средстве
- принимают и демодулируют синхронизирующее излучение и определяют параметры следующих друг за другом временных квантов,
- регулярно по мере движения транспортного средства посредством считывания транспондеров в дорожной разметке определяют параметры полосы его движения,
- при совпадении параметров текущего временного кванта и текущей полосы движения транспортного средства производят круговое и вперед направленное моночастотные СВЧ-излучения соответственно первой и второй опорных частот мощностями, необходимыми для обозначения зоны безопасности данного транспортного средства при текущей скорости его движения,
- на основе результатов доплеровского анализа принятых СВЧ-сигналов от других транспортных средств в соответствующих квантах времени определяют угрозы безопасности перестроения данного транспортного средства слева, сзади и справа, которые выражают значениями соответственно трех булевых переменных L, M, R,
- формируют данные для отображения водителю, содержащие запрет на перестроение влево и одновременно разрешение на перестроение вправо до прихода очередного временного кванта с параметрами текущего временного кванта при наличии угроз слева (L=1) совместно с отсутствием угроз сзади (М=0) совместно с отсутствием угроз справа (R=0),
- формируют данные для отображения водителю, содержащие разрешение на перестроение влево и одновременно запрет на перестроение вправо до прихода очередного временного кванта с параметрами текущего временного кванта при отсутствии угроз слева (L=0) совместно с отсутствием угроз сзади (М=0) совместно с наличием угроз справа (R=1),
- формируют данные для отображения водителю, содержащие запрет на перестроение как влево, так и вправо до прихода очередного временного кванта с параметрами текущего временного кванта при наличии угроз слева (L=1) совместно с наличием угроз справа (R=1) либо при наличии угроз сзади (М=1),
- формируют данные для отображения водителю, содержащие разрешение на перестроение как влево, так и вправо до прихода очередного временного кванта с параметрами текущего временного кванта при отсутствии угроз слева (L=0) совместно с отсутствием угроз сзади (М=0) совместно с отсутствием угроз справа (R=0),
- причем синхронизирующее электромагнитное поле создают монолитным от одного передатчика, например с несущей в средневолновом (СВ) диапазоне частот, либо составным из нескольких пересекающихся и синхронизированных полей, создаваемых передатчиками, размещенными вдоль магистрали и связанными между собой оптоволокном,
- причем СВЧ-излучение от других транспортных средств регистрируют лишь от попутных транспортных средств, движущихся на полосе движения данного транспортного средства и до двух из имеющихся полос слева и справа,
- причем число квантов в каждой серии синхроимпульсов задают равным максимальному числу полос движения на трассе в соответствующем направлении, выделяют начало каждой серии, например, длительностью первого импульса, а значение кванта времени задают таким, чтобы за время прохождения их двух серий не произошло существенного изменения взаимного положения транспортных средств на трассе во всем диапазоне возможных скоростей их движения,
- причем при движении каждого транспортного средства транспондеры считывают по обоим его бортам, а в качестве номера полосы его движения назначают номер правой разметочной линии и лишь при сбое в отслеживании таковой номер полосы движения транспортного средства назначают по номеру левой разметочной полосы,
- причем переменную L формируют как логическое совмещение условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в минус две единицы при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения частотой выше первой опорной частоты, либо логического совмещения условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в минус одну единицу при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения первой опорной частоты или выше таковой, либо при нулевом номере текущей полосы движения,
- причем переменную M формируют как логическое совмещение условий совпадения номеров текущего временного кванта и текущей полосы движения данного транспортного средства при совпадении значений их признаков направления движения и при одновременной регистрации гармоник заднего СВЧ-излучения частотой выше второй опорной частоты,
- причем переменную R формируют как логическое совмещение условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в плюс две единицы при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения частотой выше первой опорной частоты, либо логического совмещения условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в плюс одну единицу при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения первой опорной частоты или выше таковой, либо при текущем движении транспортного средства по крайней правой полосе.
Технический результат достигается также тем, что в систему для реализации заявляемого способа помощи водителям при перестроениях, содержащую на борту каждого транспортного средства на трассе узлы получения информации об окружающем транспортное средство пространстве, в частности, доплеровский датчик кругового СВЧ-излучения и доплеровский датчик заднего СВЧ-излучения, а также устройство формирования изображения на лобовом стекле транспортного средства, дополнительно введены, размещаемые в окрестности трассы:
формирователь общей синхропоследовательности, передатчик синхронизирующего СВ-излучения и пассивные транспондеры в разметке полос движения,
а на борту каждого транспортного средства:
блок отслеживания общей синхропоследовательности, приемник синхронизирующего СВ-излучения, ПЗУ-управления сенсорами, круговой СВЧ-излучатель первой опорной частоты, направленный вперед СВЧ-излучатель второй опорной частоты, цифровой спидометр, логический элемент Исключающее ИЛИ с инверсией, первый, второй, третий, четвертый, пятый D-триггеры, блок определения полосы движения, ПЗУ-управления индикацией, первый и второй логические элементы ИЛИ,
причем выход формирователя общей синхропоследовательности соединен с входом передатчика синхронизирующего СВ-излучения, вход блока отслеживания общей синхропоследовательности подключен к выходу приемника синхронизирующего СВ-излучения, его первый выход связан с первым входом логического элемента Исключающее ИЛИ с инверсией, а его второй трехразрядный выход соединен с первым трехразрядным входом ПЗУ-управления сенсорами, второй трехразрядный вход ПЗУ-управления сенсорами соединен с первым трехразрядным выходом блока определения полосы движения, а его третий вход связан с выходом логического элемента Исключающее ИЛИ с инверсией, второй вход которого подключен к второму выходу блока определения полосы движения, семиразрядный выход ПЗУ-управления сенсорами своей 0-линией соединен с первым входом кругового СВЧ-излучателя первой опорной частоты, с первым входом направленного вперед СВЧ-излучателя второй опорной частоты, входом доплеровского датчика заднего СВЧ-излучения и первым входом третьего D-триггера, своей 1-линией связан с входом доплеровского датчика кругового СВЧ- излучения, своей 2-линией подключен к первому входу первого D-триггера, своей 3-линией соединен с входом второго D-триггера. своей 4-линией связан с первым входом четвертого D-триггера, своей 5-линией подключен к первому входу пятого D-триггера, своей 6-линией соединен с первым входом первого логического элемента ИЛИ, цифровой спидометр своим восьмиразрядным выходом связан со вторыми восьмиразрядными входами кругового СВЧ-излучателя первой опорной частоты и направленного вперед СВЧ-излучателя второй опорной частоты, а также входом блока определения полосы движения, двухразрядный выход доплеровского датчика кругового СВЧ-излучения своей 0-линией связан со вторыми входами первого и второго логических элементов ИЛИ, а своей 1-линией соединен со вторыми входами первого и второго D-триггеров, а также с третьими входами первого и второго логических элементов ИЛИ, выход доплеровского датчика заднего СВЧ-излучения подключен ко второму входу третьего D-триггера, выход первого логического элемента ИЛИ соединен со вторым входом четвертого D-триггера, выход второго логического элемента ИЛИ связан со вторым входом пятого D-триггера, третий выход блока определения полосы движения соединен с первым входом второго логического элемента ИЛИ, пятиразрядный вход ПЗУ-управления индикацией своей 0-линией подключен к выходу первого D-триггера, своей 1-линией соединен с выходом второго D-триггера, своей 2-линией соединен с выходом третьего D-триггера, своей 3-линией соединен с выходом четвертого D-триггера, своей 4-линией соединен с выходом пятого D-триггера, двухразрядный выход ПЗУ-управления индикацией связан с двухразрядным входом устройства формирования изображения на лобовом стекле транспортного средства,
а формирователь общей синхропоследовательности включает в себя первый генератор импульсов, первый кольцевой счетчик, первый Т-триггер, третий логический элемент ИЛИ, первый ждущий мультивибратор, второй ждущий мультивибратор,
причем выход первого генератора импульсов соединен со входом первого кольцевого счетчика и первым входом третьего логического элемента ИЛИ, выход первого кольцевого счетчика связан со входом первого Т-триггера, первый выход которого соединен с входом первого ждущего мультивибратора, а второй выход связан с входом второго ждущего мультивибратора, выход первого ждущего мультивибратора подключен ко второму входу третьего логического элемента ИЛИ, выход второго ждущего мультивибратора соединен с третьим входом третьего логического элемента ИЛИ, выход которого представляет выход формирователя общей синхропоследовательности,
а блок отслеживания общей синхропоследовательности включает в себя второй кольцевой счетчик, третий ждущий мультивибратор, четвертый ждущий мультивибратор, четвертый логический элемент ИЛИ, первый логический элемент И, второй логический элемент И, первый RS-триггер,
причем вход блока отслеживания общей синхропоследовательности совпадает с первым входом второго кольцевого счетчика, первыми входами первого и второго логических элементов И, а также входами третьего и четвертого ждущих мультивибраторов, выход третьего ждущего мультивибратора связан со вторым входом первого логического элемента И, выход четвертого ждущего мультивибратора соединен со вторым входом второго логического элемента И, выход первого логического элемента И связан с первым входом четвертого логического элемента ИЛИ и первым входом первого RS-триггера, выход второго логического элемента И соединен со вторым входом четвертого логического элемента ИЛИ и вторым входом первого RS-триггера, выход четвертого логического элемента ИЛИ соединен со вторым входом второго кольцевого счетчика, выход RS-триггера представляет первый выход блока отслеживания общей синхропоследовательности, второй выход которого представляет выход второго кольцевого счетчика,
а блок определения полосы движения включает в себя левую антенну считывания транспондеров, радиочастотный переключатель, радиочастотный интерфейс, пятый ждущий мультивибратор, шестой ждущий мультивибратор, правую антенну считывания транспондеров, третий кольцевой счетчик, второй генератор импульсов, второй генератор импульсов, третий логический элемент И, логический элемент НЕ, сдвиговый регистр, четвертый логический элемент И, пятый логический элемент И, шестой логический элемент И, седьмой логический элемент И, первый параллельный регистр, четвертый кольцевой счетчик, пятый кольцевой счетчик, ждущий блокинг-генератор, ПЗУ-определения полосы движения, пятый логический элемент ИЛИ, ПЗУ-временных интервалов, второй параллельный регистр,
причем выход левой антенны считывания транспондеров подключен к первому входу радиочастотного переключателя, ко второму входу которого подключена правая антенна считывания транспондеров, выход второго генератора импульсов соединен со входом второго Т-триггера, первый выход которого связан с третьим входом радиочастотного переключателя, первыми входами четвертого и пятого логических элементов И, а также с первыми входами четвертого и пятого кольцевых счетчиков, выход радиочастотного переключателя соединен со входом радиочастотного интерфейса, выход которого соединен со входом пятого ждущего мультивибратора и первым входом сдвигового регистра, выход пятого ждущего мультивибратора соединен со входом шестого ждущего мультивибратора, выход которого соединен со вторым входом сдвигового регистра и первым входом третьего кольцевого счетчика, выход которого связан с первым трехразрядным входом третьего логического элемента И, 8-разрядный выход сдвигового регистра своей 0-линией соединен со входом логического элемента НЕ, своими 6 и 7-линиями связан со вторым входом третьего логического элемента И, своими 1,2,3,4-линиями - с первым входом первого параллельного регистра и своими 1,2,3,4,5-линиями соединен с первым входом второго параллельного регистра, выход логического элемента НЕ связан с третьим входом третьего логического элемента И, второй выход второго Т-триггера соединен с первыми входами шестого и седьмого логических элементов И, выход третьего логического элемента И связан со вторыми входами четвертого, пятого, шестого и седьмого логических элементов И, а также входом ждущего блокинг-генератора, выход ждущего блокинг-генератора соединен с третьим входом сдвигового регистра и вторым входом третьего кольцевого счетчика, выход четвертого логического элемента И подключен ко второму входу первого параллельного регистра, третий вход которого подключен к выходу четвертого кольцевого счетчика, выход пятого логического элемента И связан со вторым входом четвертого кольцевого счетчика, выход шестого логического элемента И соединен со вторым входом пятого кольцевого счетчика, выход которого связан с третьим входом второго параллельного регистра, выход седьмого логического элемента И соединен с вторым входом второго параллельного регистра, первый выход первого параллельного регистра соединен с первым входом ПЗУ-определения полосы движения, а второй выход связан с первым входом пятого логического элемента ИЛИ, первый выход второго параллельного регистра соединен со вторым входом ПЗУ-определения полосы движения, а второй выход подключен ко второму входу пятого логического элемента ИЛИ, выход ПЗУ-временных интервалов соединен с третьими входами четвертого и пятого кольцевых счетчиков, выход ПЗУ-определения полосы движения представляет первый выход блока определения полосы движения, второй выход которого представлен выходом пятого логического элемента ИЛИ, а третий выход представлен третьим выходом второго параллельного регистра, вход блока определения полосы движения совпадает с входом ПЗУ-временных интервалов.
При описании предлагаемого способа используются следующие чертежи:
фиг. 1 - сенсорное оборудование трассы и транспортного средства (вид сверху);
фиг. 2 - обозначения элементов трассы и синхропоследовательности;
фиг. 3 - граф управления индикацией;
фиг. 4 - пример определения возможностей перестроений.
Суть предлагаемого способа помощи водителям транспортных средств при перестроениях заключается в обозначении с помощью электромагнитных СВЧ-полей каждым транспортным средством своей зоны (капсулы) безопасности и формирование водителю каждого транспортного средства запретительной индикации на его лобовом стекле или приборной панели в случае вторжения при возможном перестроении в чужую зону безопасности. Здесь, наряду с привычным пониманием зоны безопасности вдоль направления движения транспортного средства, в качестве зоны его безопасности рассматривается также область круга вокруг транспортного средства такого же радиуса.
Предлагаемый способ включает в себя следующие действия:
(D1) - предварительно размещают в горизонтальной дорожной разметке и, в частности, в линиях ограничения дорожного полотна в обоих направлениях движения и в пунктирных линиях разделения полос движения пассивные транспондеры (радиометки) под слоем дорожной краски с шагом пунктирной разметки, причем в транспондеры заложенные в каждую из указанных линий заранее записывают информацию, содержащую признак направления движения, признак крайней правой линии и номер линии, считая от нуля и в направлении от середины магистрали к ее краям в обоих направлениях движения;
(D2) - формируют на всю трассу синхронизирующее электромагнитное поле, модулированием которого обозначают циклически повторяющиеся две серии временных квантов (интервалов) для синхронизации взаимодействия всех транспортных средств на трассе, причем число квантов в каждой такой серии задают равным максимальному числу полос движения на трассе в соответствующем направлении, и тем или иным образом выделяют начало каждой серии, а значение кванта времени задают таким, чтобы за время прохождения их двух серий не произошло существенного изменения взаимного положения транспортных средств на трассе во всем диапозоне возможных скоростей их движения;
(D3) - на каждом транспортном средстве принимают и демодулируют синхронизирующее излучение, выявляют начало и признак направленности текущей серии временных квантов, и определяют номер текущего временного кванта в каждый момент времени;
(D4) - на каждом транспортном средстве регулярно по мере его движения посредством считывания транспондеров в дорожной разметке определяют значения признака направленности и признака крайней полосы, а также номер текущей полосы его движения, причем считывают транспондеры по обоим бортам транспортного средства, а в качестве номера полосы его движения назначают номер правой разметочной линии и лишь при сбое в отслеживании правой разметочной линии номер полосы движения транспортного средства назначают по номеру левой разметочной полосы;
(D5) - на каждом транспортном средстве при совпадении номеров текущего временного кванта и текущей полосы движения данного транспортного средства при одновременном совпадении значений их признаков направления движения производят круговое и вперед направленное моночастотные СВЧ-излучения соответственно первой и второй опорных частот мощностями, необходимыми для обозначения зоны безопасности данного транспортного средства при текущей скорости его движения;
(D6) - на каждом транспортном средстве регистрируют СВЧ-излучения от других транспортных средств на трассе, причем указанные сигналы регистрируют лишь от попутных транспортных средств, движущихся на полосе движения данного транспортного средства и до двух из имеющихся полос слева и справа;
(D7) - на каждом транспортном средстве на основе результатов доплеровского анализа принятых СВЧ-сигналов от других транспортных средств в соответствующих квантах времени определяют угрозы безопасности перестроения данного транспортного средства слева по ходу его движения, сзади по полосе его движения значения и справа, наличие или отсутствие которых выражают значениями соответственно трех булевых переменных L, M, R,
причем переменную L формируют как логическое совмещение условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в минус две единицы при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения частотой выше первой опорной частоты, либо логического совмещения условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в минус одну единицу при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения первой опорной частоты или выше таковой, либо при нулевом номере текущей полосы движения,
а переменную M формируют как логическое совмещение условий совпадения номеров текущего временного кванта и текущей полосы движения данного транспортного средства при совпадении значений их признаков направления движения и при одновременной регистрации гармоник заднего СВЧ-излучения частотой выше второй опорной частоты,
а переменную R формируют как логическое совмещение условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в плюс две единицы при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения частотой выше первой опорной частоты либо логического совмещения условий отличия номера текущего временного кванта от номера текущей полосы движения данного транспортного средства в плюс одну единицу при совпадении значений их признаков направления движения и при одновременной регистрации гармоник кругового СВЧ-излучения первой опорной частоты или выше таковой либо при текущем движении транспортного средства по крайней правой полосе;
(D8) - на каждом транспортном средстве формируют данные для отображения водителю, содержащие запрет на перестроение в левую смежную полосу и одновременно разрешение на перестроение в правую смежную полосу до прихода очередного временного кванта с параметрами номера и признака направления такими же как у текущего временного кванта при наличии угроз слева (L=1) совместно с отсутствием угроз сзади (М=0) совместно с отсутствием угроз справа (R=0), то есть при L!M!R=1, где слитное написание переменных означает их конъюнкцию, дизъюнкция обозначается знаком - v, логическое отрицание обозначают восклицательным знаком перед переменной;
(D9) - на каждом транспортном средстве формируют данные для отображения водителю, содержащие разрешение на перестроение влево и одновременно запрет на перестроение вправо до прихода очередного временного кванта с параметрами номера и признака направления такими же как у текущего временного кванта при отсутствии угроз слева (L=0) совместно с отсутствием угроз сзади (М=0) совместно с наличием угроз справа (R=1), то есть при !L!MR=1;
(D10) - на каждом транспортном средстве формируют данные для отображения водителю, содержащие запрет на перестроение как влево, так и вправо до прихода очередного временного кванта с параметрами номера и признака направления такими же, как у текущего временного кванта при наличии угроз слева (L=1) совместно с наличием угроз справа (R=1) либо при наличии угроз сзади (М=1), то есть при LRVM=1;
(D11) - на каждом транспортном средстве формируют данные для отображения водителю до прихода очередного временного кванта с параметрами номера и признака направления такими же как у текущего временного кванта, содержащие разрешение на перестроение как влево, так и вправо при отсутствии угроз слева (L=0) совместно с отсутствием угроз сзади (М=0) совместно с отсутствием угроз справа (R=0), то есть при !L!M!R=1;
(D12) - отображают ранее содержательно обработанную информацию о допустимости перестроения в данный момент времени как влево, так и вправо.
Действие D1 выполняют один раз при внедрении способа. Действие D2 выполняют непрерывно централизованно для всех транспортных средств на трассе. Действия D3, D4, D5 выполняют постоянно локально на каждом транспортном средстве на трассе. Совместно все указанные действия обеспечивают с помощью СВЧ-излучения обозначение зоны безопасности каждого транспортного средства на трассе с учетом путевых скоростей их движения в разные кванты времени на разных полосах движения. Действия D6, D7 для каждого транспортного средства на трассе выявляют наличие угроз в виде других транспортных средств для перестроения влево и вправо на основе регистрации попадания в их зоны безопасности с тенденцией сближения с данным транспортным средством для совершения обгона или перестроения с использованием указанных полос движения. Действия D8, D9, D10, D11 являются действиями по принятию решений, их выполняют на борту каждого транспортного средства на трассе с целью подготовки данных для выполнения действия D12. Порядок следования действий D8, D9, D10, D11 зависит от характера маневрирования транспортных средств на трассе и определяется графом управления индикацией (фиг. 3), состояния которого представляют всевозможные состояния устройства формирования изображения на лобовом стекле транспортного средства в части отображения возможностей перестроений транспортного средства, действия D8, D9, D10, D11 играют роль выходных сигналов на переходах графа, а соответствующие условия их выполнения играют роль входных сигналов на таких переходах.
Предлагаемый способ выполняется следующим образом. Первоначально посредством выполнения действия D1 оборудуют пассивными транспондерами линии ограничения дорожного полотна в обоих направлениях и все пунктирные линии разделения полос движения магистрали, предварительно записав в транспондеры каждой разметочной линии одинаковые данные: значения признаков крайней полосы и направления движения, а также номер данной полосы. Далее непрерывно выполняют действие D2 и над всей трассой формируют модулированное общей синхропоследовательностью (фиг. 2) синхронизирующее электромагнитное поле. Это поле воспринимает оборудование каждого транспортного средства на трассе (фиг. 1) и с помощью действия D3 преобразует его в сигналы своего клона общей синхропоследовательности. Поскольку задачу оценки возможностей перестроений решают локально в пределах зоны безопасности каждого транспортного средства, то различием временных задержек распространения синхронизирующих сигналов до различных транспортных средств на трассе можно пренебречь. Одновременно при движении на каждом транспортном средстве в соответствии с действием D4 посредством бортового оборудования регулярно считывают значения транспондеров в полосах дорожной разметки и таким образом определяют свою текущую полосу движения. При этом считывание транспондеров производят по обоим бортам транспортного средства, а в качестве номера полосы его движения назначают номер правой разметочной линии и лишь при сбое в отслеживании правой разметочной линии номер полосы движения транспортного средства назначают по номеру левой разметочной полосы.
В соответствии с действием D5 посредством бортового оборудования на каждом транспортном средстве на трассе сверяют номера и признаки направленности следующих друг за другом временных квантов своего клона общей синхропоследовательности и при совпадении указанных параметров очередного временного кванта с аналогичными параметрами текущей полосы движения транспортного средства производят круговое и вперед направленное моночастотное СВЧ-излучение соответственно первой и второй опорных частот мощностью, необходимой для обозначения зоны безопасности транспортного средства при текущей скорости его движения. Одновременно согласно действию D6 на каждом транспортном средстве в каждом кванте времени определяют возможные угрозы его перестроению с левых двух полос движения, сзади с полосы его движения и с правых двух движения и в результате такого анализа формируют значения трех булевых переменных соответственно L, M, R.
При этом надо учитывать, что все транспортные средства «прослушивают» эфир непрерывно, а обозначают свою зону безопасности СВЧ-излучением лишь в течении одного временного кванта в каждом цикле общей синхропоследовательности. Поэтому соответствующие логические формулы при вычислении логических переменных L, M, R формируют постепенно с сохранением промежуточных результатов, а полученные значения переменных L, M, R сохраняют до получения их новых значений в следующем цикле общей синхропоследовательности. Кроме того, надо иметь в виду, что результаты вычислений переменных L, M, R на каждом транспортном средстве зависят от текущей дорожной ситуации, в которой оно участвует. Поэтому применение действия D6 рассмотрим на примере дорожной ситуации, изображенной на фиг. 4, где определяются возможности перестроений транспортных средств A, B, C, D с учетом их текущего взаимного положения в предположении соотношения их текущих путевых скоростей VA=VD>VB>VC.
С учетом изложенного, для транспортного средства А получают L=M=R=0, так как оно регистрирует СВЧ-излучение только справа от транспортного средства В и при этом VA>VB (фиг. 4).
Для транспортного средства В, как видно из рассмотрения фиг. 4, имеет место L=1 и M=R=0, так как транспортное средство В регистрирует СВЧ-излучение только слева от транспортных средств А и С, причем транспортное средство С движется по смежной полосе слева.
Для транспортного средства С, как видно из рассмотрения фиг. 4, имеет место L=0 и M=R=1, оно регистрирует СВЧ-излучение от транспортных средств В и D, причем VD>VC и транспортное средство В занимает смежную полосу справа.
Для транспортного средства D, как видно из фиг. 4, имеет место L=M=R=0, так как оно не регистрирует СВЧ-излучений ни слева, ни сзади, ни справа.
Дальнейшие действия на каждом транспортном средстве на трассе зависят от текущей дорожной ситуации. Рассмотрим их на примере дорожной ситуации, показанной на фиг. 4, где предполагается, что:
- путевые скорости транспортных средств соотносятся как VA=VD>VB>VC;
- зоны безопасности транспортных средств A, B, C, D для наглядности показаны одновременно, тогда как на самом деле они обозначаются СВЧ-излучением в разных квантах времени;
- кривые стрелки обозначают разрешенные в данной ситуации перестроения транспортных средств.
Поскольку для транспортного средства А в предшествующем действии вычислено L=M=R=0, то из всех логических выражений, играющих роль входных сигналов на дугах графа переходов (фиг. 3) единичное значение принимает лишь выражение !L!M!R=1, что приводит к выполнению действие D11, которое формирует разрешительные данные для перестроений как влево, так и вправо.
Для транспортного средства В ранее вычислено L=1 и M=R=0. При таких значениях указанных логических переменных из всех логических выражений, играющих роль входных сигналов на дугах графа переходов (фиг. 3) единичное значение принимает лишь выражение L!M!R=1, что приводит к выполнению действия D8, которое формирует данные запрета на перестроение влево и разрешение на перестроение вправо.
Для транспортного средства С ранее вычислено L=0 и M=R=1. При таких значениях указанных логических переменных из всех логических выражений, играющих роль входных сигналов на дугах графа переходов (фиг. 3) единичное значение принимает лишь выражение !LR v М=1, что приводит к выполнению действия D10, которое формирует данные запрета на перестроение как влево, так и вправо.
Для транспортного средства D ранее вычислено L=M=R=0. При таких значениях указанных логических переменных из всех логических выражений, играющих роль входных сигналов на дугах графа переходов (фиг. 3) единичное значение принимает лишь выражение !L!R!M=1, что приводит к выполнению действия D11, которое формирует данные разрешения на перестроение как влево, так и вправо.
Сформированные данные по возможностям перестроений посредством действия D12 отображают водителю до формирования согласно действию D5 новых значений логических переменных L, M, R на каждом транспортном средстве в следующем цикле общей синхропоследовательности и на каждом транспортном средстве делается новое формирование данных для отображения и далее все повторяется.
При описании предлагаемой системы используются следующие чертежи:
фиг. 5 - функциональная схема системы;
фиг. 6 - формирователь общей синхропоследовательности;
фиг. 7 - блок отслеживания общей синхропоследовательности;
фиг. 8 - блок определения полосы движения.
На чертежах использованы следующие обозначения:
1 - формирователь общей синхропоследовательности;
2 - передатчик синхронизирующего СВ-излучения;
3 - пассивные транспондеры в дорожной разметке;
4 - блок отслеживания общей синхропоследовательности;
5 - приемник синхронизирующего СВ-излучения;
6 - постоянное запоминающее устройство (ПЗУ) управления сенсорами;
7 - круговой СВЧ-излучатель первой опорной частоты;
8 - направленный вперед СВЧ-излучатель второй опорной частоты;
9 - цифровой спидометр;
10 - логический элемент Исключающее ИЛИ с инверсией;
11 - первый D-триггер;
12 - доплеровский датчик кругового излучения;
13 - доплеровский датчик заднего излучения;
14 - блок определения полосы движения;
15 - второй D-триггер;
16 - постоянное запоминающее устройство (ПЗУ) управления индикацией;
17 - третий D-триггер;
18 - четвертый D-триггер;
19 - пятый D-триггер;
20 - устройство формирования изображений на лобовом стекле;
21 - первый логический элемент ИЛИ;
22 - второй логический элемент ИЛИ;
23 - первый генератор импульсов;
24 - первый кольцевой счетчик;
25 - первый Т-триггер;
26 - третий логический элемент ИЛИ;
27 - первый ждущий мультивибратор;
28 - второй ждущий мультивибратор;
29 - второй кольцевой счетчик;
30 - третий ждущий мультивибратор;
31 - четвертый ждущий мультивибратор;
32 - четвертый логический элемент ИЛИ;
33 - первый логический элемент И;
34 - второй логический элемент И;
35 - первый RS-триггер;
36 - левая антенна считывания транспондеров;
37 - радиочастотный переключатель;
38 - радиочастотный интерфейс;
39 - пятый ждущий мультивибратор;
40 - второй Т-триггер;
41 - правая антенна считывания транспондеров;
42 - третий кольцевой счетчик;
43 - шестой ждущий мультивибратор;
44 - второй генератор импульсов;
45 - третий логический элемент И;
46 - логический элемент НЕ;
47 - сдвиговый регистр;
48 - четвертый логический элемент И;
49 - пятый логический элемент И;
50 - шестой логический элемент И;
51 - седьмой логический элемент И;
52 - первый параллельный регистр;
53 - четвертый кольцевой счетчик;
54 - пятый кольцевой счетчик;
55 - ждущий блокинг-генератор;
56 - ПЗУ-определения полосы движения;
57 - пятый логический элемент ИЛИ;
58 - ПЗУ-временных интервалов;
59 - второй параллельный регистр.
На макроуровне предлагаемая система (фиг. 5) включает в себя размещенные в окрестности трассы: формирователь общей синхропоследовательности 1, передатчик синхронизирующего СВ-излучения 2 и пассивные транспондеры 3 под слоем краски в разметке полос движения, а на борту каждого транспортного средства: блок отслеживания общей синхропоследовательности 4, приемник синхронизирующего СВ-излучения 5, ПЗУ управления сенсорами 6, круговой СВЧ-излучатель первой опорной частоты 7, направленный вперед СВЧ-излучатель второй опорной частоты 8, цифровой спидометр 9, логический элемент Исключающее ИЛИ с инверсией 10, первый D-триггер 11, доплеровский датчик кругового СВЧ-излучения 12, доплеровский датчик заднего СВЧ-излучения 13, блок определения полосы движения 14, второй D-триггер 15, ПЗУ управления индикацией 16, третий D-триггер 17, четвертый D-триггер 18, пятый D-триггер 19, устройство формирования изображения на лобовом стекле 20, первый логический элемент ИЛИ 21, второй логический элемент ИЛИ 22,
причем выход формирователя общей синхропоследовательности 1 соединен с входом (модуляции) передатчика синхронизирующего СВ-излучения 2, вход блока отслеживания общей синхропоследовательности 4 подключен к выходу приемника синхронизирующего СВ-излучения 5, его первый выход (признака направленности в синхропоследовательности) связан с первым входом логического элемента Исключающее ИЛИ с инверсией 10, а его второй трехразрядный выход (номера текущего кванта времени) соединен с первым трехразрядным (адресным) входом ПЗУ-управления сенсорами 6, второй трехразрядный (адресный) вход ПЗУ-управления сенсорами 6 соединен с первым трехразрядным выходом (номера текущей полосы движения) блока определения полосы движения 14, а его третий вход (выбора кристалла) связан с выходом логического элемента Исключающее ИЛИ с инверсией 10, второй вход которого подключен к второму выходу (признака направления движения) блока определения полосы движения 14, семиразрядный выход ПЗУ-управления сенсорами 6 своей 0-линией соединен с первым входом (включения/выключения) кругового СВЧ-излучателя первой опорной частоты 7, с первым входом (включения/выключения) направленного вперед СВЧ-излучателя второй опорной частоты 8, входом (включения/выключения) направленного доплеровского датчика заднего СВЧ-излучения 13 и первым входом (записи) третьего D-триггера 17, своей 1-линией связан с входом (включения/выключения) доплеровского датчика кругового СВЧ-излучения 12, своей 2-линией подключен к первому входу (записи) первого D-триггера 11, своей 3-линией соединен с входом (записи) второго D-триггера 15. своей 4-линией связан с первым входом (записи) четвертого D-триггера 18, своей 5-линией подключен к первому входу (записи) пятого D-триггера 19, своей 6-линией соединен с первым входом первого логического элемента ИЛИ 21, цифровой спидометр 9 своим восьмиразрядным выходом связан со вторыми восьмиразрядными входами (управления мощностью излучения) кругового СВЧ-излучателя первой опорной частоты 7 и направленного вперед СВЧ-излучателя второй опорной частоты 8, а также входом блока определения полосы движения 14, двухразрядный выход доплеровского датчика кругового СВЧ-излучения 12 своей 0-линией (признака выявления гармоник первой опорной частоты) связан со вторыми входами первого 21 и второго 22 логических элементов ИЛИ, а своей 1-линией (признака выявления гармоник частоты выше первой опорной) соединен со вторыми (информационными) входами первого 11 и второго 15 D-триггеров, а также с третьими входами первого 21 и второго 22 логических элементов ИЛИ, выход (признака выявления гармоник частоты выше второй опорной частоты) доплеровского датчика заднего СВЧ-излучения 13 подключен ко второму (информационному) входу третьего D-триггера 17, выход первого логического элемента ИЛИ 21 соединен со вторым (информационным) входом четвертого D-триггера 18, выход второго логического элемента ИЛИ 22 связан со вторым (информационным) входом пятого D-триггера 19, третий выход (признака крайней полосы) блока определения полосы движения 14 соединен с первым входом второго логического элемента ИЛИ 22, пятиразрядный вход ПЗУ-управления индикацией 16 своей 0-линией подключен к выходу первого D-триггера 11, своей 1-линией соединен с выходом второго D-триггера 15, своей 2-линией соединен с выходом третьего D-триггера 17, своей 3-линией соединен с выходом четвертого D-триггера 18, своей 4-линией соединен с выходом пятого D-триггера 19, двухразрядный выход ПЗУ-управления индикацией 16 связан с двухразрядным входом устройства формирования изображения на лобовом стекле 20,
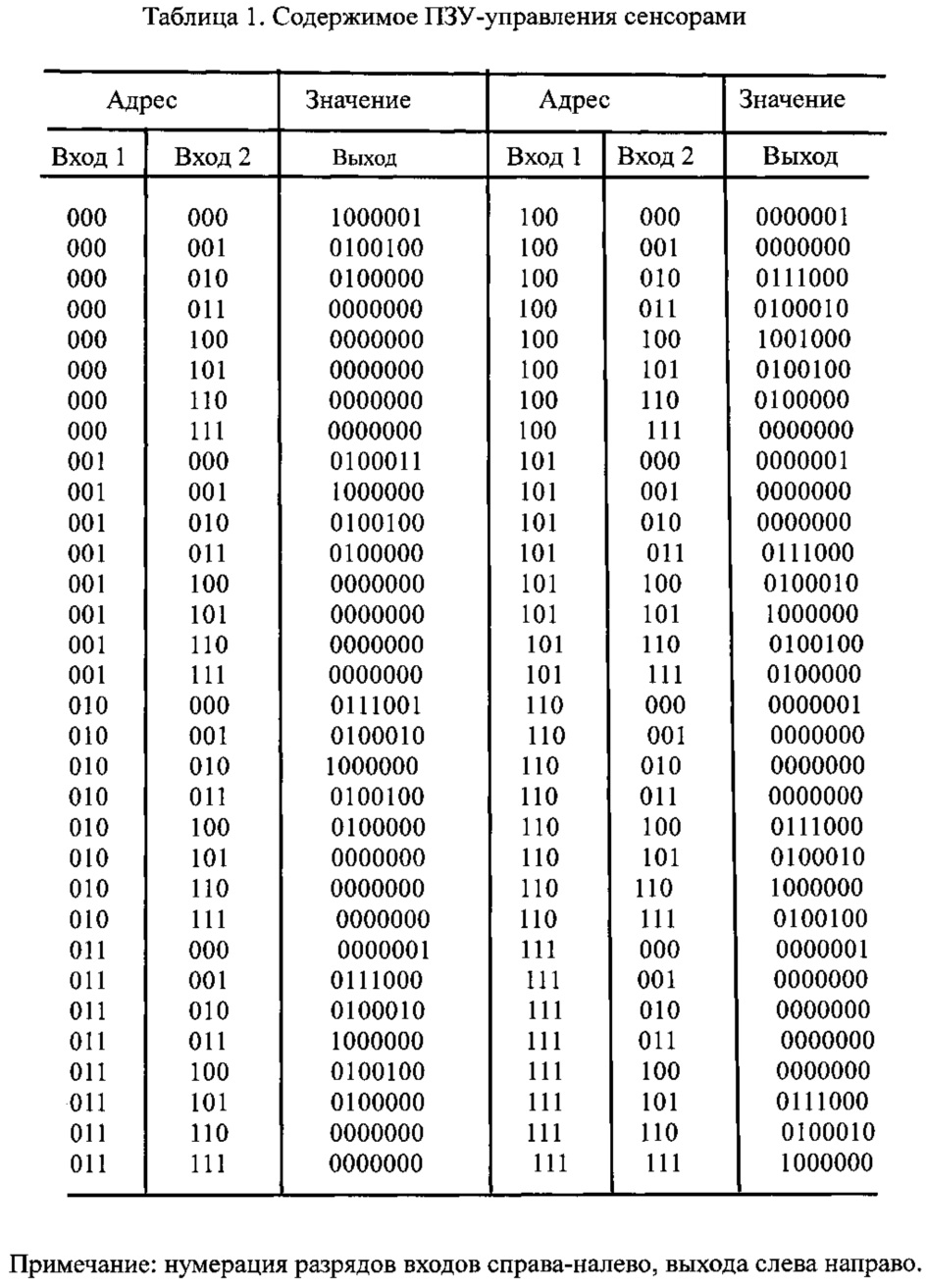
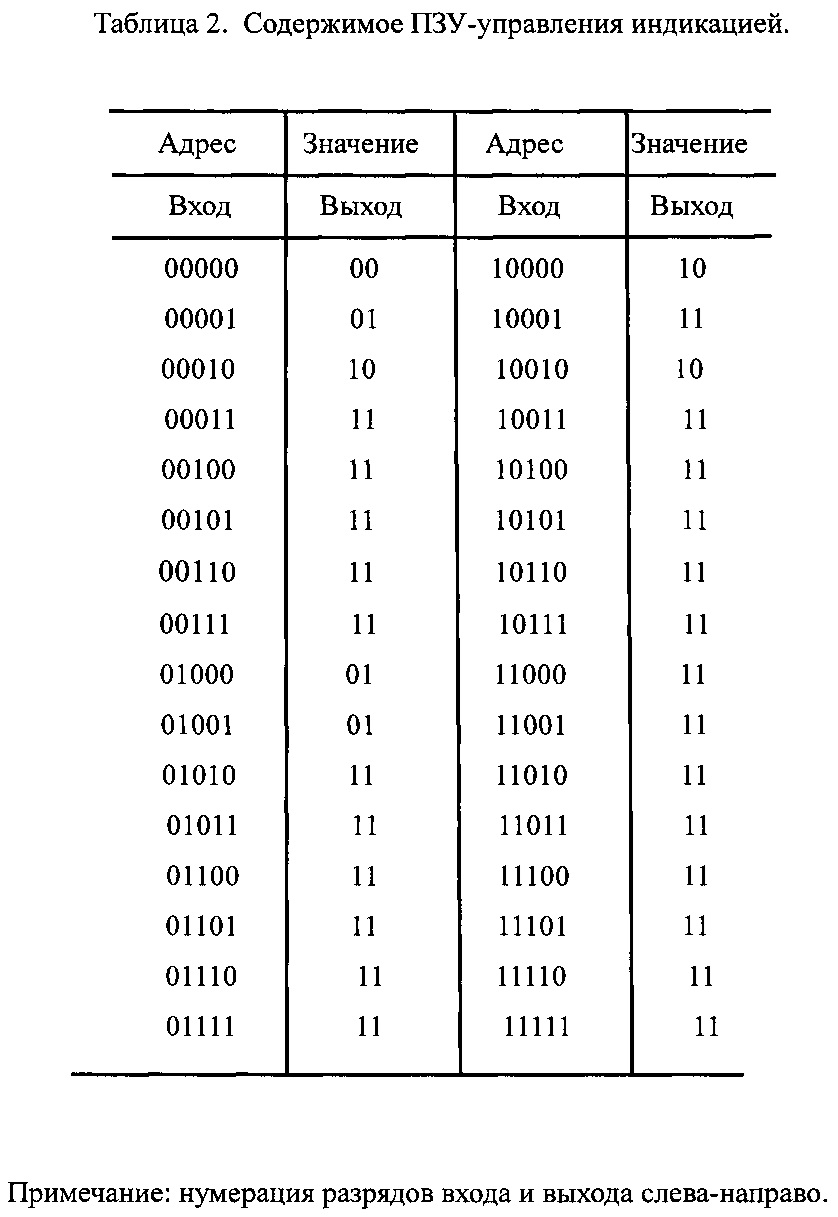
причем содержимое ПЗУ-управления сенсорами 6 представлено табл. 1, содержимое ПЗУ-управления индикацией 16 представлено табл. 2, а в качестве пассивных транспондеров в дорожной разметке 3 можно использовать, например, транспондеры AT88RF001 от корпорации Atmel [10], работающие по стандарту ISO/IEC 14443-2 на частоте 13,56 МГц и обеспечивающие дальность действия до 1 метра при скорости чтения до 106 кбит/сек.
Формирователь общей синхропоследовательности 1 (фиг. 6) включает в себя первый генератор импульсов 23, первый кольцевой счетчик 24, первый Т-триггер 25, третий логический элемент ИЛИ 26, первый 27 и второй 28 ждущие мультивибраторы,
причем выход первого генератора импульсов 23 соединен со (счетным) входом первого кольцевого счетчика 24 и первым входом третьего логического элемента ИЛИ 26, выход (переполнения) первого кольцевого счетчика 24 связан со (счетным) входом первого Т-триггера 25, первый (прямой) выход которого соединен с входом первого ждущего мультивибратора 27, а второй (инверсный) выход связан с входом второго ждущего мультивибратора 28, (прямой) выход первого ждущего мультивибратора 27 подключен ко второму входу третьего логического элемента ИЛИ 26, (прямой) выход второго ждущего мультивибратора 28 соединен с третьим входом третьего логического элемента ИЛИ 26, выход которого представляет выход формирователя общей синхропоследовательности 1,
причем первый счетчик 24 имеет 7 состояний, длительность импульсов второго ждущего мультивибратора 28 больше длительности импульсов первого ждущего мультивибратора 27, длительность которых в свою очередь больше длительности импульсов первого генератора импульсов 23 в степени, достаточной для распознавания указанных импульсов по длительности в блоке отслеживания общей синхропоследовательности 4, а период следования импульсов (квант времени общей синхропоследовательности) первого генератора импульсов 23 выбирают таким, чтобы за это время не произошло существенного изменения взаимного положения транспортных средств на трассе (например, 100 герц).
Блок отслеживания общей синхропоследовательности 4 (фиг. 7) включает в себя второй кольцевой счетчик 29, третий 30 и четвертый 31 ждущие мультивибраторы, четвертый логический элемент ИЛИ 32, первый 33 и второй 34 логические элементы И, первый RS-триггер 35,
причем вход блока отслеживания общей синхропоследовательности 4 совпадает с первым (счетным) входом второго кольцевого счетчика 29, первыми входами первого 33 и второго 34 логических элементов И, а также входами третьего 30 и четвертого 31 ждущих мультивибраторов, (инверсный) выход третьего ждущего мультивибратора 30 связан со вторым входом первого логического элемента И 33, (инверсный) выход четвертого ждущего мультивибратора соединен со вторым входом второго логического элемента 34, выход первого логического элемента И 33 связан с первым входом четвертого логического элемента ИЛИ 32 и первым (R) входом первого RS-триггера 35, выход второго логического элемента И 34 соединен со вторым входом четвертого логического элемента ИЛИ 32 и вторым (S) входом первого RS-триггера 35, выход четвертого логического элемента ИЛИ 32 соединен со вторым входом (сброса) второго кольцевого счетчика 29, (прямой) выход RS-триггера 35 представляет первый выход (признака направленности) блока отслеживания общей синхропоследовательности 4, второй выход (номера текущего кванта времени) которого представляет (параллельный) выход второго кольцевого счетчика 29,
причем второй кольцевой счетчик 29 имеет 7 состояний, длительность импульса третьего ждущего мультивибратора 30 должна быть больше длительности импульса первого генератора импульсов 23, но меньше длительности импульса первого ждущего мультивибратора 27, длительность импульса четвертого ждущего мультивибратора 31 должна быть больше длительности импульса первого ждущего мультивибратора 27 и одновременно меньше длительности импульса второго ждущего мультивибратора 28.
Блок определения полосы движения 14 (фиг. 8) включает в себя левую антенну считывания транспондеров 36, радиочастотный переключатель 37, радиочастотный интерфейс 38, пятый ждущий мультивибратор 39, второй Т-триггер 40, правую 41 антенну считывания транспондеров 41, третий кольцевой счетчик 42, шестой ждущий мультивибратор 43, второй генератор импульсов 44, третий логический элемент И 45, логический элемент НЕ 46, сдвиговый регистр 47, четвертый 48, пятый 49, шестой 50 и седьмой 51 логические элементы И, первый параллельный регистр 52, четвертый 53 и пятый 54 кольцевые счетчики, ждущий блокинг-генератор 55, ПЗУ-определения полосы движения 56, пятый логический элемент ИЛИ 57, ПЗУ-временных интервалов 58, второй параллельный регистр 59,
причем выход левой антенны считывания транспондеров 36 подключен к первому (информационному) входу радиочастотного переключателя 37, ко второму (информационному) входу которого подключена правая антенна считывания транспондеров 41, выход второго генератора импульсов 44 соединен со (счетным) входом второго Т-триггера 40, первый (прямой) выход которого связан с третьим (управляющим) входом радиочастотного переключателя 37, первыми входами четвертого 48 и пятого 49 логических элементов И, а также с первыми входами (декремента) четвертого 53 и пятого 54 кольцевых счетчиков, выход радиочастотного переключателя 37 соединен со входом радиочастотного интерфейса 38, выход которого соединен со входом пятого ждущего мультивибратора 39 и первым (информационным) входом сдвигового регистра 47, выход пятого ждущего мультивибратора 39 соединен со входом шестого ждущего мультивибратора 43, выход которого соединен со вторым входом (записи с последующим сдвигом) сдвигового регистра 47 и первым (счетным) входом третьего кольцевого счетчика 42, (параллельный) выход которого связан с первым трехразрядным входом третьего логического элемента И 45, 8-разрядный выход сдвигового регистра 47 своей 0-линией соединен со входом логического элемента НЕ 46, своими 6 и 7-линиями связан со вторым (2-разрядным) входом третьего логического элемента И 45, своими 1,2,3,4-линиями - с первым (информационным) входом первого параллельного регистра 52 и своими 1,2,3,4,5-линиями соединен с первым (информационным) входом второго параллельного регистра 59, выход логического элемента НЕ 46 связан с третьим входом третьего логического элемента И 45, второй (инверсный) выход второго Т-триггера 40 соединен с первыми входами шестого 50 и седьмого 51 логических элементов И, выход третьего логического элемента И 45 связан со вторыми входами четвертого 48, пятого 49, шестого 50 и седьмого 51 логических элементов И, а также входом ждущего блокинг-генератора 55, выход ждущего блокинг-генератора 55 соединен с третьим входом (сброса) сдвигового регистра 47 и вторым входом (сброса) третьего кольцевого счетчика 42, выход четвертого логического элемента И 48 подключен ко второму входу (записи) первого параллельного регистра 52, третий вход (сброса) которого подключен к выходу (признака переполнения) четвертого кольцевого счетчика 53, выход пятого логического элемента И 49 связан со вторым входом (записи) четвертого кольцевого счетчика 53, выход шестого логического элемента И 50 соединен со вторым входом (записи) пятого кольцевого счетчика 54, выход (признака 0) которого связан с третьим входом (сброса) второго параллельного регистра 59, выход седьмого логического элемента И 51 соединен с вторым входом (записи) второго параллельного регистра 59, первый выход (номера левой разметочной полосы) первого параллельного регистра 52 соединен с первым (адресным) входом ПЗУ-определения полосы движения 56, а второй выход (признака направленности движения) связан с первым входом пятого логического элемента ИЛИ 57, первый выход (номера правой разметочной полосы) второго параллельного регистра 59 соединен со вторым (адресным) входом ПЗУ-определения полосы движения 56, а второй выход (признака направленности движения) подключен ко второму входу пятого логического элемента ИЛИ 57, выход ПЗУ-временных интервалов 58 соединен с третьими (параллельными информационными) входами четвертого 53 и пятого 54 кольцевых счетчиков, выход ПЗУ-определения полосы движения 56 представляет первый выход блока определения полосы движения 14, второй выход которого представлен выходом пятого логического элемента ИЛИ 57, а третий выход (признака крайней полосы) представлен третьим (5-разрядом) выходом второго параллельного регистра 59, вход блока определения полосы движения 14 совпадает с (8-разрядным адресным) входом ПЗУ-временных интервалов 58,
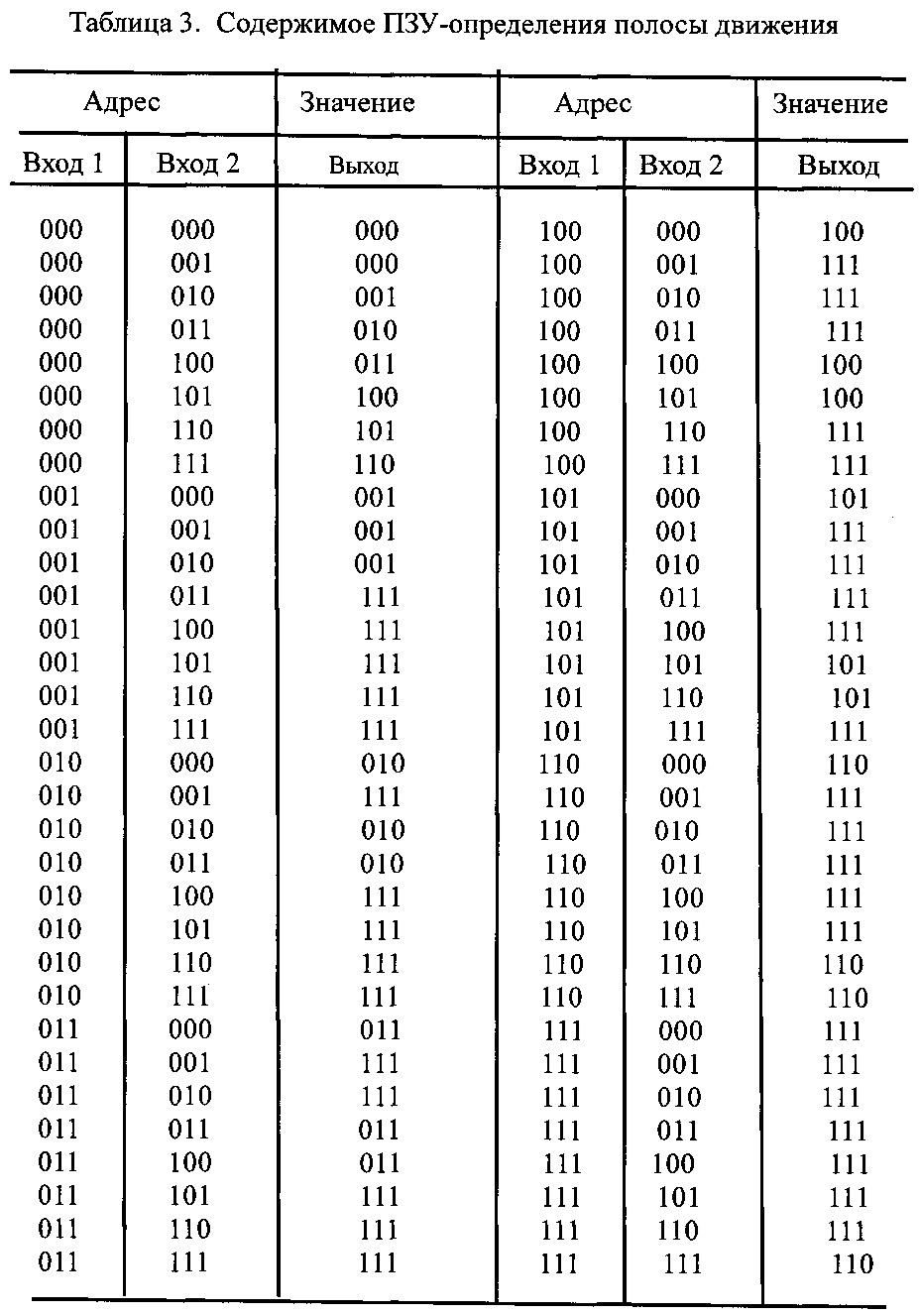
причем содержимое ПЗУ-определения полосы движения 56 представлено табл. 3, содержимое ПЗУ-временных интервалов 58 представлено табл. 4, для реализации радиочастотного интерфейса 38 существует ряд интегральных микросхем, например U2270B от корпорации Atmel [10], с типичным манчестерским кодированием данных, читаемых с транспондеров, частоту второго генератора импульсов 44 выбирают из соображений возможности чтения за время прохождения транспортным средством очередных транспондеров при максимальной скорости движения и радиусе считывания транспондеров в 1 метр как слева, так и справа, например, 100 герц, пятый ждущий мультивибратор 39 должен запускаться как по положительному, так и по отрицательному перепаду потенциала, а
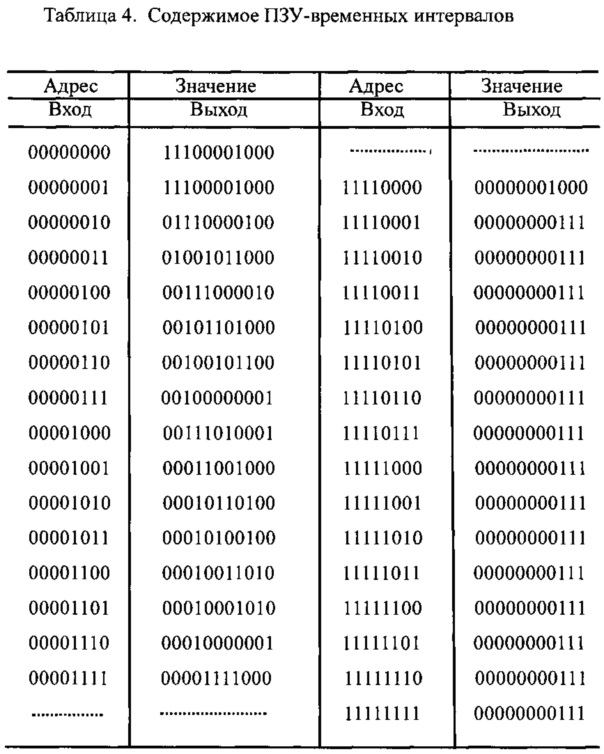
длительность его импульса должна быть существенно больше полупериода чтения одного бита данных транспондера и также существенно меньше его периода, длительность импульса шестого ждущего мультивибратора 43 должна быть существенно меньше длительности полупериода чтения одного бита данных транспондера, длительность импульсов ждущего блокинг-генератора 55 должна быть не больше полупериода чтения 1 бита данных транспондера, например 1 мкс, третий кольцевой счетчик 42 содержит 3 разряда, сдвиговый регистр 47 содержит 8 разрядов, первый 55 и второй 59 параллельные регистры содержат соответственно по 4 и 5 разрядов, четвертый 53 и пятый 54 кольцевые счетчики содержат по 11 разрядов, ПЗУ-определения полосы движения 56 содержит 64 3-разрядных слова, ПЗУ-временных интервалов 58 содержит 256 11-разрядных слов, частота второго генератора импульсов 43 определяется настройками транспондеров, например при скорости считывания транспондеров в 100 кбит/сек эта частота равна 100 кГц.
Предлагаемая система рассчитана на использование на магистралях максимум с 7-полосами движения в каждую сторону и применима к большинству современных и перспективных магистралей, поскольку автоматически адаптируется к магистралям с меньшим числом полос. Масштабирование системы на магистрали с большим числом полос сводится лишь к изменению размерностей элементов с памятью и не является изобретательством.
На макроуровне (фиг. 5) предлагаемая система работает следующим образом: при включении питания системы формирователь общей синхропоследовательности 1 непрерывно вырабатывает общую синхропоследовательность (фиг. 2) в виде двух чередующихся серий импульсов, каждая из которых используется для синхронизации действий транспортных средств на трассе в одном направлении движения. Стартовый импульс каждой из указанных серий шире рядовых импульсов общей синхропоследовательности, причем стартовый импульс второй серии шире аналогичного импульса первой серии. Сигналы сформированной таким образом общей синхропоследовательности поступают на вход передатчика синхронизирующего СВ-излучения 2 в качестве сигналов модуляции формируемого им излучения. Способ модулирования указанного СВ-излучения не принципиален. Важно, чтобы это СВ-излучение доходило до каждого транспортного средства на трассе и чтобы приемник синхронизирующего СВ-излучения 5 на борту каждого транспортного средства мог обеспечить демодуляцию общей синхропоследовательности.
Период следования импульсов в общей синхропоследовательности (квант времени) задают таким, чтобы за время до прихода следующего одноименного импульса взаимоположение транспортных средств на трассе существенно не изменилось. Например, для 14-полосной трассы (по 7 полос в каждую сторону) можно считать приемлемым квант времени в 0.7 мсек (частота генерации 1430 герц), т.к. за время до приходя следующего одноименного импульса даже при скорости движения транспортного средства в 250 км/час его смещение будет в 0.7 м., чем в решаемой задаче вполне можно пренебречь. Дальнейшее описание будет относиться к работе системы в рамках одного транспортного средства, имея в виду, что описываемые действия со своими нюансами выполняются одновременно на каждом транспортном средстве на трассе.
С выхода приемника синхронизирующего СВ-излучения 5 сигналы демодулированной общей синхропоследовательности поступают на вход блока отслеживания общей синхропоследовательности 4, задача которого заключается в формировании на своем первом выходе текущего признака направленности, а на втором своем выходе текущего номера временного кванта на основе анализа текущего состояния общей синхропоследовательности. Указанные данные поступают соответственно на первый вход логического элемента Исключающее ИЛИ с инверсией 10 и первый (3-разрядный адресный) вход ПЗУ-управления сенсорами 6.
Одновременно в процессе движения транспортного средства на основе считывания транспондеров 3, размещенных в полосах горизонтальной дорожной разметки по обоим бортам транспортного средства блок определения полосы движения 14 формирует на своем первом (трехразрядном) выходе двоичный код номера текущей полосы движения транспортного средства, который подается на второй (адресный) вход ПЗУ-управления сенсорами 6, на своем втором выходе - двоичный код признака направленности движения, который подается на второй вход логического элемента Исключающее ИЛИ с инверсией 10, на своем третьем выходе - код признака крайней полосы, который подается на первый вход второго логического элемента ИЛИ 22. При совпадении кодов на обоих входах логического элемента Исключающее ИЛИ с инверсией 10, то есть при совпадении значений признаков направленности текущей серии общей синхропоследовательности и текущей полосы движения транспортного средства, на его выходе формируется единичный сигнал, который поступает на третий вход (выбора кристалла) ПЗУ-управления сенсорами 6, обеспечивая тем самым выборку данных из ПЗУ-управления сенсорами 6. Каждое слово ПЗУ-управления сенсорами 6 представляет собой команду параллельного управления СВЧ-излучателями, датчиками СВЧ-излучения и вспомогательными элементами памяти на борту транспортного средства в ситуациях, определяемых значением признака направления движения, номера полосы движения транспортного средства и номера текущего кванта времени.
А-именно, 0-линия 7-разрядного выхода ПЗУ-управления сенсорами 6 при единичном значении сигнала на ней задает включение кругового СВЧ-излучателя первой опорной частоты 7, направленного вперед СВЧ-излучателя второй опорной частоты 8, доплеровского датчика заднего СВЧ-излучения 13 и запись сигнала с выхода доплеровского датчика заднего СВЧ-излучения 13 в третий D-триггер 17, а нулевой сигнал определяет их выключение, 1-линия аналогично задает команду включения /выключения доплеровского датчика кругового СВЧ-излучения 12, 2-линия задает команду записи с 1-линии (признака выявления гармоник частоты выше первой опорной) выхода доплеровского датчика кругового СВЧ-излучения 12 сигнала в первый D-триггер 11, 3-линия выхода ПЗУ-управления сенсорами 6 задает команду записи сигнала с 1-линии (признака выявления гармоник частоты выше первой опорной) выхода доплеровского датчика кругового СВЧ-излучения 12 во второй D-триггер 15, 4-линия задает команду записи в четвертый D-триггер 18 сигнала с выхода первого логического элемента ИЛИ 21, 5-линия задает команду записи в четвертый D-триггер 19 сигнала с выхода второго логического элемента ИЛИ 22, наконец, 6-линия выхода ПЗУ-управления сенсорами 6 формирует на первом входе первого логического элемента ИЛИ 21 сигнал значения признака 0-полосы текущего движения транспортного средства. В соответствии с предложенным способом круговой СВЧ-излучатель первой опорной частоты 7, направленный вперед СВЧ-излучатель второй опорной частоты 8 и доплеровский датчик заднего СВЧ-излучения 13 включаются только при совпадении номеров текущего кванта времени и текущей полосы движения транспортного средства при одновременном совпадении их признаков направления.
Поэтому 0-разряд в ПЗУ-управления сенсорами 6 равен 1 лишь в словах по адресам с равными значениями по обоим адресным входам, то есть по адресам 000000, 001001,010010 и т.д., и нулевым значением в 0-разряде по остальным адресам. В третьем D-триггере 17 формируется значение логической переменной М. Наличие единичного сигнала на выходе доплеровского датчика заднего СВЧ-излучения 13 говорит о том, что данное транспортное средство попало в зону безопасности следующего за ним другого транспортного средства, движущегося с более высокой скоростью, возможно, с целью обгона справа или слева, или например, с целью перестроения для перехода на более скоростную полосу. В этом случае в третий D-триггер 17 записывается 1, соответствующая М=1. Это означает наличие опасности для перестроения данного транспортного средства как влево, так и вправо. В соответствии с предложенным способом сигналы доплеровского датчика кругового СВЧ-излучения 12 используются для оценки дорожных ситуаций лишь в случаях, когда разность номеров текущего кванта времени и текущей полосы движения транспортного средства составляет одну и две единицы с любым знаком.
Поэтому в 1-разряде ПЗУ-управления сенсорами 6 единичное значение присутствует лишь в словах с адресами, удовлетворяющими указанным условиям, например, по адресам 000001, 000010, 001000, 010000 и т.д. По остальным адресам в 1-разряде содержатся нулевые значения. В первый D-триггер 11 записывается единичное значение при выявлении доплеровским датчиком кругового СВЧ-излучения 12 гармоник частоты выше первой опорной частоты во время следования кванта времени с номером на 2 единицы меньше номера текущей полосы движения транспортного средства. Это означает, что данное транспортное средство попало в зону безопасности по крайней мере одного другого транспортного средства, движущегося через полосу слева, с которым происходит сближение из-за его более высокой скорости и которое может начать перестраиваться вправо в любой момент времени, Поэтому в такой ситуации данному транспортному средству нельзя разрешить перестроение влево.
Таким образом, в первом D-триггере 11 формируется первая компонента логической переменной L и во 2-разряд ПЗУ-управления сенсорами 6 записаны единичные значения по адресам, удовлетворяющим указанным условиям, например, по адресам 010000, 011001, 100010 и т.д. По остальным адресам во 2-разряде ПЗУ-управления сенсорами 6 заполнено нулевыми значениями. Во второй D-триггер 15 записывается единичное значение при выявлении доплеровским датчиком кругового СВЧ-излучения 12 гармоник частоты выше первой опорной частоты во время течения кванта времени с номером на 2 единицы больше номера текущей полосы движения транспортного средства.
Это означает, что данное транспортное средство попало в зону безопасности по крайней мере одного другого транспортного средства, движущегося через полосу справа с которым происходит сближение из-за его более высокой скорости и которое может начать перестраиваться влево в любой момент времени, Поэтому в такой ситуации данному транспортному средству нельзя разрешить перестроение вправо. Таким образом, во втором D-триггере 15 формируется первая компонента логической переменной R и в 3-разряд ПЗУ-управления сенсорами 6 записаны единичные значения по адресам, удовлетворяющим указанным условиям, например, по адресам 010000, 011001, 100010 и т.д. По остальным адресам во 2-разряде ПЗУ-управления сенсорами 6 заполнено нулевыми значениями.
В четвертый D-триггер 18 единичное значение записывается при выявлении доплеровским датчиком кругового СВЧ-излучения 12 гармоник первой опорной частоты или выше таковой по 0-линии выхода и 1-линии соответственно, которые поступают на вход четвертого D-триггера 18 через первый логический элемент ИЛИ 21, в процессе прохождения кванта времени с номером на 1 меньше номера текущей полосы движения транспортного средства. Это означает, что данное транспортное средство попало в зону безопасности по меньшей мере одного другого транспортного средства, движущегося по смежной слева полосе и, следовательно, перестраиваться влево опасно. Также, очевидно, должно быть запрещено левое перестроение в случае движения транспортного средства по полосе с нулевым номером, что обеспечивается подачей единичного сигнала на вход четвертого D-триггера 18 через первый логический элемент ИЛИ 21 с выхода ПЗУ-управления сенсорами 6 по его 6-линии, когда на его втором адресном входе имеет место код 000.
В итоге на четвертом D-триггере 18 формируется вторая компонента логической переменной L. С учетом описанных условий 4-разряд ПЗУ-управления сенсорами 6 заполняется единичным значением в тех словах, для которых имеет место превышение на 1 адреса по второму входу над его адресом по первому входу, например, 000001, 001010, 010011 и т.д. В остальных словах в 4-разряде содержит нулевое значение. В 6-разряде ПЗУ-управления сенсорами 6, очевидно, должны быть записаны единичные значения в словах с нулевым адресом по своему второму входу, например, 000000, 001000, 010000 и т.д. В остальных словах в 6-разряде содержится нулевое значение.
В пятый D-триггер 19 единичное значение записывается при выявлении доплеровским датчиком кругового СВЧ-излучения 12 гармоник первой опорной частоты или выше таковой по 0-линии выхода и 1-линии соответственно, которые поступают на вход пятого D-триггера 19 через второй логический элемент ИЛИ 22, в процессе прохождения кванта времени с номером на 1 больше номера текущей полосы движения транспортного средства. Это означает, что данное транспортное средство попало в зону безопасности по меньшей мере одного другого транспортного средства, движущегося по смежной справа полосе и, следовательно, перестраиваться вправо опасно.
Также должно быть запрещено правое перестроение в случае движения транспортного средства по крайней правой полосе, что обеспечивается подачей единичного сигнала на вход пятого D-триггера 19 через второй логический элемент ИЛИ 22 с третьего выхода блока определения полосы движения 14. В итоге на пятом D-триггере 19 формируется вторая компонента логической переменной R. С учетом описанных условий 5-разряд ПЗУ-управления сенсорами 6 заполняется единичным значением в тех словах, для которых имеет место превышение на 1 адреса по первому входу над его адресом по второму входу, например, 001000, 011001, 110101 и т.д. В остальных словах в 5-разряде содержится нулевое значение.
По завершении соответствующей серии общей синхропоследовательности на первом 11, втором 15, третьем 17, четвертом 18 и пятом 19 D-триггерах оказываются сформированными все компоненты логических переменных L, M, R. С выходов указанных D-триггеров сигналы поступают на адресный вход ПЗУ-управления индикацией 16, которое в табличной форме обеспечивает логическое преобразование по сборке из ранее полученных компонентов логических переменных L и R, а также реализует логические функции, играющие роль входных сигналов на дугах графа переходов (фиг. 4). Каждое двухразрядное слово ПЗУ-управления индикацией 16 задает определенное состояние устройства формирования изображения на лобовом стекле 20, причем значение 0-разряда задает разрешение (0) или запрет (1) перестроения влево, а 1-разряд задает разрешение (0) или запрет (1) перестроения вправо. Единичное значение 0-разряда (запрет на перестроение влево) ПЗУ-управления индикацией 16 принимает в тех словах, в адресах которых либо содержится единица в 0-разряде и/или в 3-разряде (что означает единичное значение логической переменной L), либо содержится единица во 2-разряде адреса (что соответствует единичному значению логической переменной М). В остальных словах ПЗУ-управления индикацией 16 в 0-разряде содержит нулевое значение (разрешение на перестроение влево).
Единичное значение в 1-разряде (запрет на перестроение вправо) ПЗУ-управления индикацией 16 содержится в словах, в адресах которых либо содержится единица в 1-разряде и/или в 4-разряде (что соответствует единичное значение логической переменной R), либо содержится единичное значение во 2-разряде (что соответствует единичному значению логической переменной М). В остальных словах ПЗУ-управления индикацией 16 в 1-разряде содержится нулевое значение, что соответствует разрешению на перестроение вправо.
Размер зоны безопасности транспортного средства зависит от его путевой скорости и регулируется изменением мощности излучения кругового излучателя первой опорной частоты 7 и направленного вперед излучателя второй опорной частоты 8 в зависимости от текущего значения двоичного кода, подаваемого с выхода цифрового спидометра 9 на их вторые входы.
В частности, в примере дорожной обстановки, представленной фиг. 4, доплеровский датчик кругового СВЧ-излучения 12 транспортного средства А принимает круговое СВЧ-излучение лишь от транспортного средства В, которое движется справа через одну полосу с меньшей скоростью. Поэтому на выходе указанного датчика будет сформирован код 00. Доплеровский датчик заднего СВЧ-излучения 13 транспортного средства А не воспринимает излучений от других транспортных средств и на его выходе формируется код 0. Поэтому в течение соответствующей серии общей синхропоследовательности в первый 11, второй 15, третий 17, четвертый 18 и пятый 19 D-триггеры будут записаны нулевые значения. В результате на входе ПЗУ управления индикацией 16 формируется код 00000. Поэтому на выходе ПЗУ-управления индикацией 16 формируется код 00, который поступая на вход устройства формирования изображения на лобовом стекле 20, отображает водителю сигналы разрешения на перестроения как влево, так и вправо.
Доплеровский датчик кругового СВЧ-излучения 12 транспортного средства В (фиг. 4) регистрирует излучение лишь слева от транспортных средств А и С, причем VA>VB>VC. И хотя транспортное средство С уступает в скорости указанным транспортным средствам, но попадает в их зоны безопасности. Поэтому на выходе доплеровского датчика кругового СВЧ-излучения 12 формируется код 01. Доплеровский датчик заднего СВЧ-излучения 13 транспортного средства В не воспринимает излучений от других транспортных средств и на его выходе формируется код 0. Поэтому в течение соответствующей серии общей синхропоследовательности в первый 11, второй 15, третий 17 D-триггеры и пятый 19 D-триггеры будут записаны нулевые значения, а в четвертый D-триггер 18 будут записано единичное значение. В результате на входе ПЗУ управления индикацией 16 формируется код 00010. Поэтому на выходе ПЗУ-управления индикацией 16 формируется код 10, который поступая на вход устройства формирования изображения на лобовом стекле 20, отображает водителю сигналы запрета на перестроения влево и разрешения на перестроения вправо.
Доплеровский датчик кругового СВЧ-излучения 12 транспортного средства С (фиг. 4) регистрирует СВЧ-излучение от транспортных средств В и D, причем VD>VB>VC. При этом транспортное средство В удаляется от транспортного средства С по смежной справа с ним полосе движения, а транспортное средство D догоняет его сзади. Поэтому на выходе доплеровского датчика кругового СВЧ-излучения 12 формируется код 01, а на выходе доплеровского датчика заднего СВЧ-излучения 13 формируется код 1. Поэтому в течение соответствующей серии общей синхропоследовательности в первый 11 и второй 15 D-триггеры будут записаны нулевые значения, а в третий 17, четвертый 18 и пятый 19 D-триггеры будут записаны единичные значения. В результате на входе ПЗУ управления индикацией 16 формируется код 00111. Поэтому на выходе ПЗУ-управления индикацией 16 формируется код 11, который поступая на вход устройства формирования изображения на лобовом стекле 20, отображает водителю сигналы запрета на перестроения как влево, так и вправо.
Как видно из фиг. 4, у транспортного средства D ни доплеровский датчик кругового СВЧ-излучения 12, ни доплеровский датчик заднего СВЧ-излучения 13 не регистрируют СВЧ-излучений от других транспортных средств. Следовательно, на выходах указанных датчиков формируются коды соответственно 00 и 0. Поэтому в течение соответствующей серии общей синхропоследовательности в первый 11, второй 15, третий 17, четвертый 18 и пятый 19 D-триггеры будут записаны нулевые значения. В результате на входе ПЗУ управления индикацией 16 формируется код 00000. Поэтому на выходе ПЗУ-управления индикацией 16 формируется код 00, который поступая на вход устройства формирования изображения на лобовом стекле 20, отображает водителю сигналы разрешения на перестроения как влево, так и вправо.
Формирователь общей синхропоследовательности 1 работает следующим образом. Необходимую частоту следования импульсов в общей синхропоследовательности задает первый генератор импульсов 23. Остальные компоненты формирователя общей синхропоследовательности 1 лишь выделяют шириной стартовые импульсы серии первого и второго типов (фиг. 2).
В частности, импульсы с выхода первого генератора импульсов 23 поступают на (счетный) вход первого кольцевого счетчика 24 и на первый вход третьего логического элемента ИЛИ 26. Первый кольцевой счетчик 24 на 7 состояний обеспечивает формирование на своем выходе (признака переполнения) единичного сигнала при прохождении каждого седьмого импульса первого генератора импульсов 23. Указанные сигналы поступают на (счетный) вход первого Т-триггера 25 и перебрасывают его в противоположное состояние. Таким образом, в течении нахождения первого Т-триггера 25 в одном состоянии происходит формирование серии первого типа, а при нахождении в другом состоянии происходит формирование серии второго типа.
Сигналы со второго (инверсного) выхода первого Т-триггера 25 по переднему фронту запускают второй ждущий мультивибратор 28 с длительностью импульса, существенно большей длительности импульса первого ждущего мультивибратора 27, но меньшей периода следования импульсов первого генератора импульсов 23. Поскольку на различные входы третьего логического элемента ИЛИ 26 поступают импульсы от первого генератора импульсов 23, а также от первого 27 и второго 28 ждущих мультивибраторов, то на его выходе, представляющем выход формирователя общей синхропоследовательности, обеспечивается мультиплексирование указанных импульсов и таким образом формируется последовательность импульсов требуемого вида (фиг. 2).
Функцией блока отслеживания общей синхропоследовательности 4 (фиг. 7) является определение типа текущей ее серии и номера текущего кванта времени в ней на основе анализа цифровых сигналов общей синхропоследовательности, поступающих с выхода приемника синхронизирующего СВ-излучения 5. Работает этот блок следующим образом. Указанные выше сигналы поступают одновременно на (счетный) вход второго кольцевого счетчика 29, входы третьего 30 и четвертого 31 ждущих мультивибраторов, а также первые входы первого 33 и второго 34 логических элементов И, которые совместно представляют вход блока отслеживания общей синхропоследовательности 4. Каждый входной импульс переводит второй кольцевой счетчик 29 в следующее состояние, формируя на своем (параллельном) выходе, представляющем второй выход блока отслеживания общей синхропоследовательности 4, номер очередного временного кванта.
Одновременно запускаются третий 30 и четвертый 31 ждущие мультивибраторы. Если очередной входной импульс не является стартовым импульсом серии одного или второго типа, то поскольку длительности нулевых сигналов формируемых на (инверсных) выходах третьего 30 и четвертого 31 ждущих мультивибраторов и подаваемых на вторые выходы соответственно первого 33 и второго 34 логических элементов И, больше длительности импульсов первого генератора импульсов 23, то они блокируют прохождение единичного сигнала к первому RS-триггеру 35 и через четвертый логический элемент ИЛИ 32 ко второму кольцевому счетчику 29, оставляя их в прежних состояниях.
Однако если очередной входной импульс является стартовым импульсом серии первого типа, то его длительность оказывается больше длительности импульса третьего 30, но меньше длительности импульса четвертого 31 ждущих мультивибраторов, то появится единичный сигнал на выходе первого логического элемента И 33. По этому единичному сигналу через четвертый логический элемент ИЛИ 32 будет сброшен в нулевое состояние второй кольцевой счетчик 29, а также по первому (R) входу сбрасывается в нулевое состояние первый RS-триггер 35. Следовательно, на (прямом) выходе первого RS-триггера, представляющем первый выход блока отслеживания общей синхропоследовательности 4, формируется нулевой сигнал, как признак прохождения серии первого типа. В то же время отсчет последующих ее импульсов будет производится от нуля.
Если же очередной входной импульс является стартовым импульсом серии второго типа, то его длительность оказывается больше длительностей импульсов третьего 30 и четвертого 31 ждущих мультивибраторов. Тогда появится единичный сигнал на выходе второго логического элемента И 34. Поэтому единичному сигналу через четвертый логический элемент ИЛИ 32 будет сброшен в нулевое состояние второй кольцевой счетчик 29, а также по второму (S) входу первый RS-триггер 35 устанавливается в единичное состояние. Следовательно, на (прямом) выходе первого RS-триггера, представляющем первый выход блока отслеживания общей синхропоследовательности 4, формируется единичный сигнал, как признак прохождения серии импульсов второго типа. В то же время отсчет последующих ее импульсов будет производится от нуля.
Блок определения полосы движения 14 работает следующим образом. Для считывания транспондеров как слева, так и справа по ходу транспортного средства используется один и тот же радиочастотный интерфейс 38, который работает с левой 36 и правой 41 антеннами считывания транспондеров в режиме разделения времени. С выхода третьего генератора импульсов 44 импульсы поступают на (счетный) вход второго Т-триггера 40, обеспечивая регулярное изменение его состояние. Сигналы с (прямого) выхода второго Т-триггера 40 поступают на третий (управляющий) вход радиочастотного переключателя 37. Нулевой сигнал на этом входе обеспечивает прохождение на вход радиочастотного интерфейса 38 радиочастотных сигналов с выхода левой антенны считывания транспондеров 36, единичный сигнал с выхода аналогичной правой антенны 41. Радиочастотный интерфейс 38 выделяет из радиочастотного входного сигнала цифровой сигнал модуляции в манчестерском коде.
Манчестерский код [2] относится к самосинхронизирующимся кодам. При таком кодировании информация кодируется перепадами потенциала, происходящими в середине каждого такта. Переход в середине такта используется как синхроимпульс, а также как элемент данных. При этом двоичная 1 кодируется перепадом от низкого уровня сигнала к высокому уровню, а двоичный 0 представляется обратным переходом от высокого уровня сигнала к низкому уровню. В начале каждого такта может происходить служебный перепад сигнала при передаче подряд нескольких 1 или 0. При этом пассивному состоянию соответствует высокий потенциал.
Считывание данных с транспондеров производится в асинхронном режиме информационными посылками, каждая из которых состоит из бита старта (значение 0), бит признака крайней полосы, бит признака направления движения, три бита номера полосы движения и два стоп-бита (значения 11), то есть всего 8 бит. Если в транспондерах при их создании указанные информационные посылки заложены в качестве их идентификаторов, то такие информационный посылки будут непрерывно генерироваться каждым транспондером и соответственно считываться блоком определения полосы движения 14 во время их взаимодействия в процессе проезда транспортным средством мимо транспондера.
При считывании очередной такой информационной посылки выдаваемые радиочастотным интерфейсом 38 цифровые сигналы поступают на вход пятого ждущего мультивибратора 39 и на первый (информационный) вход сдвигового регистра 47. По переднему фронту бит-старта пятый ждущий мультивибратор 39 генерирует единичный импульс, который на время своего существования блокирует возможность его запуска ближайшим служебным перепадом потенцала, а по своему переднему фронту запускает шестой ждущий мультивибратор 43. С его выхода импульсы поступают на второй вход (записи со сдвигом) сдвигового регистра 43 и одновременно на первый (счетный) вход третьего кольцевого счетчика 42 с восемью состояниями. В результате в сдвиговый регистр 47 записывается с выхода радиочастотного интерфейса 38 установившееся значение текущего бита информационной посылки транспондера, а содержимое третьего кольцевого счетчика увеличится на 1.
Таким же образом в сдвиговый регистр 47 записывается вся 8-битовая информационная посылка транспондера, а в третьем кольцевом счетчике 42 накапливается количество бит в принятой информационной посылке. Признаком завершения считывания информационной посылки служит появление единичного сигнала на выходе третьего логического элемента И 45. Такой сигнал формируется только, когда на первом (трехразрядном) входе третьего логического элемента И 45 имеет место код 111 (то есть считано 8 бит), на втором (двухразрядном) входе имеет место код 11 (то есть считаны стоп-биты информационной посылки) и на третьем (одноразрядном) входе имеет место единичный сигнал с выхода инвертора 46 (то есть считан старт-бит информационной посылки). Единичный сигнал с выхода третьего логического элемента И 45 поступает на вторые входы четвертого 48, пятого 49, шестого 50 и седьмого 51 логических элементов И, а также на вход блокинг-генератора 55. Если в данный момент производится считывание транспондера справа по ходу транспортного средства, то на первом (прямом) выходе второго Т-триггера 40 имеет место единичный сигнал, который поступает на первые входы шестого 50 и седьмого 51 логических элементов И.
Одновременно со второго (инверсного) выхода второго Т-триггера 40 на первые входы четвертого 48 и пятого 49 логических элементов И подается нулевой сигнал. Поэтому на выходах шестого 50 и седьмого 51 логических элементов И формируются единичные сигналы, которые поступают на вторые входы (записи) пятого кольцевого счетчика 54 и второго параллельного регистра 59. В результате во второй параллельный регистр 59 с параллельного выхода сдвигового регистра 47 записываются считанные с транспондера данные (без старт-бита и двух стоп-битов), а в пятый кольцевой счетчик 54 с выхода ПЗУ-временных интервалов 58 записывается в условных единицах максимальный временной интервал до следующего считывания транспондера справа по ходу транспортного средства при минимальной скорости его движения.
В качестве адресов ПЗУ-временных интервалов 58 берется скорость V транспортного средства в км/час в диапазоне [0,255] с шагом 1, выраженная в двоичном коде, которая подается на (восьмиразрядный адресный) вход данного ПЗУ с выхода цифрового спидометра 9. Значение ПЗУ-временных интервалов 58 по любому адресу, кроме адреса при V=0, определяется согласно выражению S/(V2T) с округлением результата до ближайшего целого и последующим преобразованием в двоичный эквивалент, где S - расстояние, отсутствие считываний транспондеров на котором, трактуется как потеря отслеживаемой разметочной пунктирной полосы, Τ - период повторения второго генератора импульсов 44. Здесь полагается S=10 м, Т=0.01 сек., V=1 км/час. При V=0 блок определения полосы движения 14 воспроизводит номер полосы движения, непосредственно предшествующей остановке транспортного средства, а значение ПЗУ совпадает со значением при V=1.
Если же на втором (инверсном) выходе второй Т-триггера 40 имеет место единичный сигнал, то есть считываются транспондеры слева по ходу транспортного средства, то единичные сигналы формируются на выходах четвертого 48 и пятого 49 логических элементов И, которые поступают соответственно на второй вход (записи) первого параллельного регистра 52 и на второй вход (записи) четвертого кольцевого счетчика 53. Тогда данные очередного транспондера слева (без старт-бита и двух стоп-битов) записываются в первый параллельный регистр 52, а соответствующее слово ПЗУ-временных интервалов 58 копируется в четвертый кольцевой счетчик 53. После записи данных в указанные выше блоки по заднему фронту импульса ждущего блокинг-генератора 55, который поступает на второй вход (сброса) третьего кольцевого счетчика 42 и третий вход (сброса) сдвигового регистра 47, и сбрасывает их нулевое исходное состояние.
Одновременно с первых (трехразрядных) выходов первого 52 и второго 59 параллельных регистров двоичные коды номеров разметочных полос слева и справа по ходу транспортного средства поступают соответственно на первый и второй (адресные) входы ПЗУ-определения полосы движения 56. Указанное ПЗУ на основе сопоставления текущих номеров разметочных полос слева и справа по ходу транспортного средства определяет номер текущей полосы его движения, который в двоичной форме формируется на (трехразрядном) выходе этого ПЗУ, а следовательно и на первом выходе блока определения полосы 14. Заполнение ПЗУ-определения полосы движения 56 выполнено таким образом, что при равенстве или превышении значения кода по второму (адресному) входу на 1 либо при нулевом значении кода по второму (адресному) входу в соответствующие слова памяти занесено значение, равное значению кода по первому входу ПЗУ. В случаях нулевых значений кодов по первому (адресному) входу и одновременно ненулевых значений кодов по вторым (адресным) входам в соответствующие слова памяти занесены значения на 1 меньшие значений кодов по второму входу. В остальные слова этого ПЗУ занесены код 111, который означает невозможное сочетание адресов по первому и второму входам ПЗУ-определения полосы движения 56. Появление одинаковых кодов на первом и втором (адресных) входах возможно при боковых смещениях транспортного средства относительно разметки полос, а появление нулевых кодов по одному из указанных входов возможно при неисправности или отсутствии транспондеров в некоторых линиях дорожной разметки. Одновременно со вторых входов первого 52 и второго 59 параллельных регистров через пятый логический элемент ИЛИ 57 на второй выход блока определения полосы движения 14 поступает текущее значение признака направления движения.
Одновременно на третьем выходе второго параллельного регистра 59, а следовательно и на третьем выходе блока определения полосы движения 14 формируется текущее значение признака крайней полосы. В процессе работы второго генератора импульсов 44 и считывании транспондеров слева и справа по ходу транспортного средства на выходах пятого 49 и седьмого 51 логических элементов И будут формироваться единичные сигналы, которые будут поочередно поступать на вторые входы (декремента) соответственно четвертого 53 и пятого 54 кольцевых счетчиков, уменьшая их содержимое. При регулярном считывании транспондеров по ходу транспортного средства содержимое четвертого 53 и пятого 54 кольцевых счетчиков не может опуститься до нуля, так как после каждого считывания транспондера слева или справа по ходу транпортного средства происходит перезапись соответствующего кольцевого регистра из ПЗУ-временных интервалов 58. Однако при нарушении регулярности считывания транспондеров соответствующий кольцевой счетчик 53 или 54 обнулится и тогда единичный сигнал с его выхода (переполнения) поступит на третий вход (сброса) соответственно, первого 52 или второго 59 параллельного регистра и сбросит их в нулевое состояние.
Характеристики распространения СВ-излучения мало зависят от метеоусловий и времени суток. То же самое относится к СВЧ-излучению на малых расстояниях в 100-150 метров, по крайней мере в диапазонах Wi-Fi и радиотелефонии. Таким образом, предлагаемый способ и система обеспечивают автоматическую оценку безопасности возможных перестроений транспортных средств на многополосных магистралях во всем реально возможном диапазоне скоростей транспортных потоков, при любых метеоусловиях, в любое время суток, без визуального и интеллектуального отвлечения водителей от контроля фронтальной дорожной обстановки в процессе управления транспортным средством. Следовательно, они повышают безопасность дорожного движения и уменьшают нервную нагрузку на водителей транспортных средств.
Источники информации
1. Иванов В.Н. Наука управления автомобилем. М.: «Транспорт», 1990, с. 150.
2. Дшхунян В.Л. Электронная идентификация. Бесконтактные электронные идентификаторы и смарт-карты / В.Л. Шаньгин. - М.: ООО «Издательство АСТ», Издательство «HT Пресс». - 2004. - 695 с.
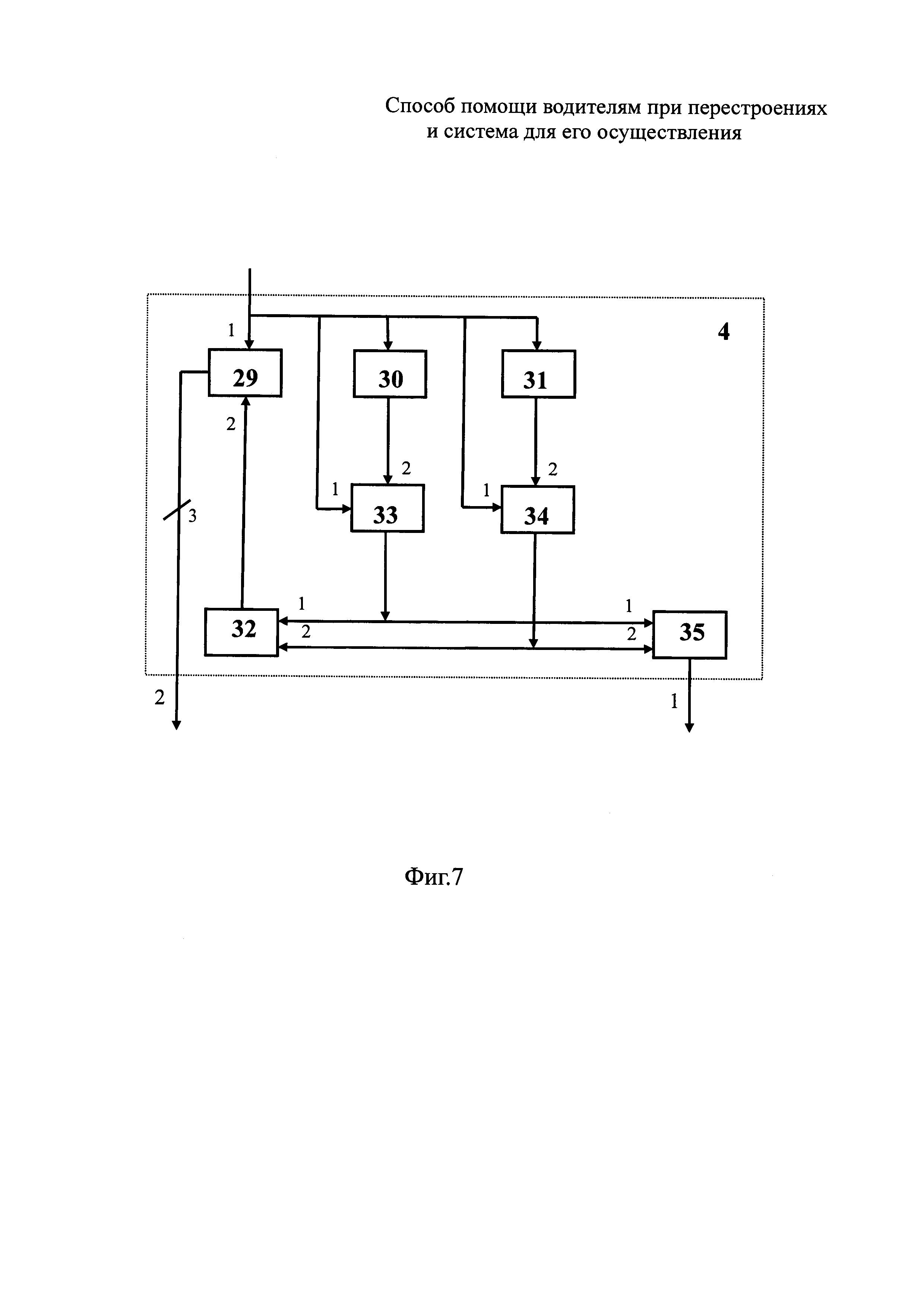
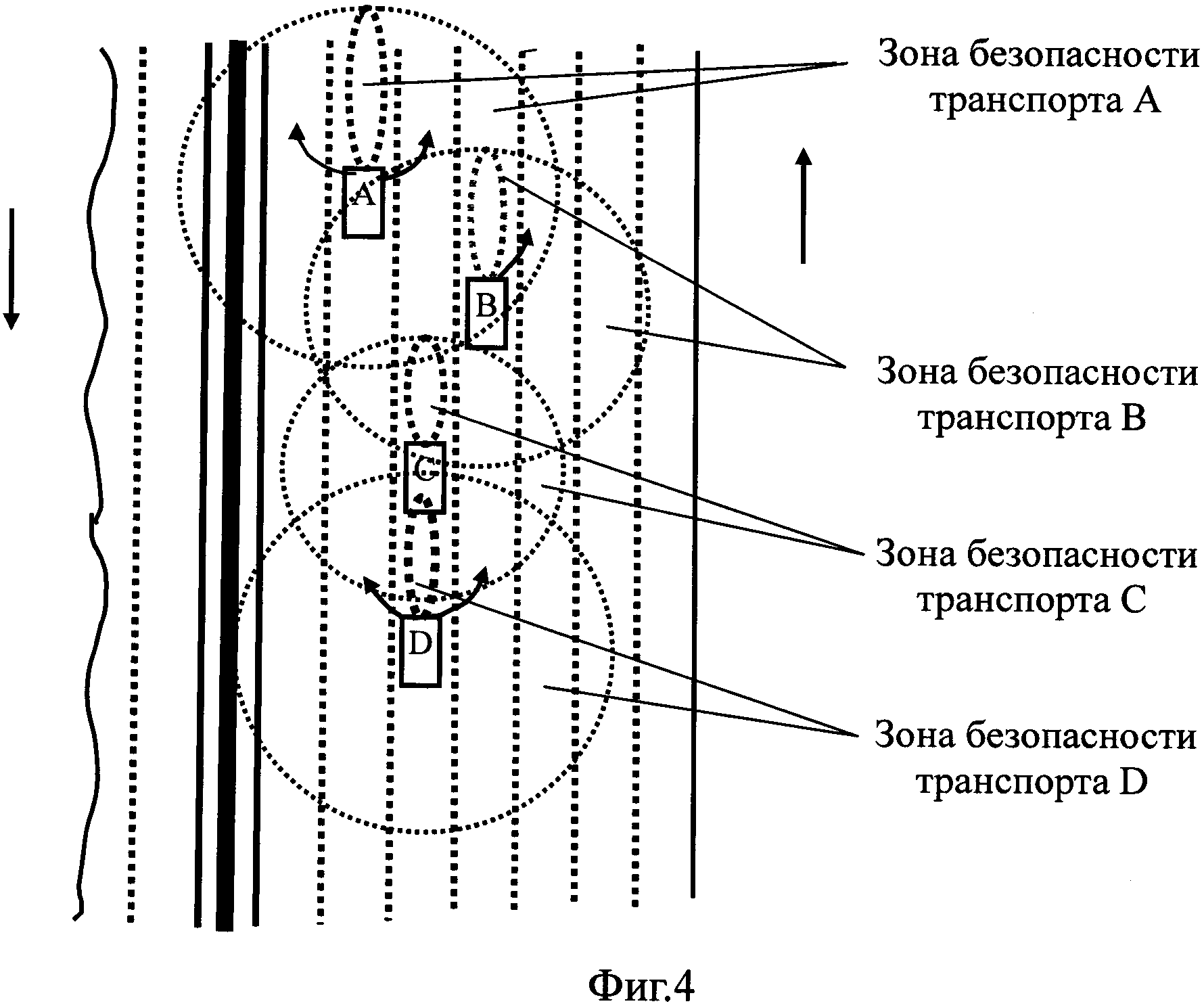
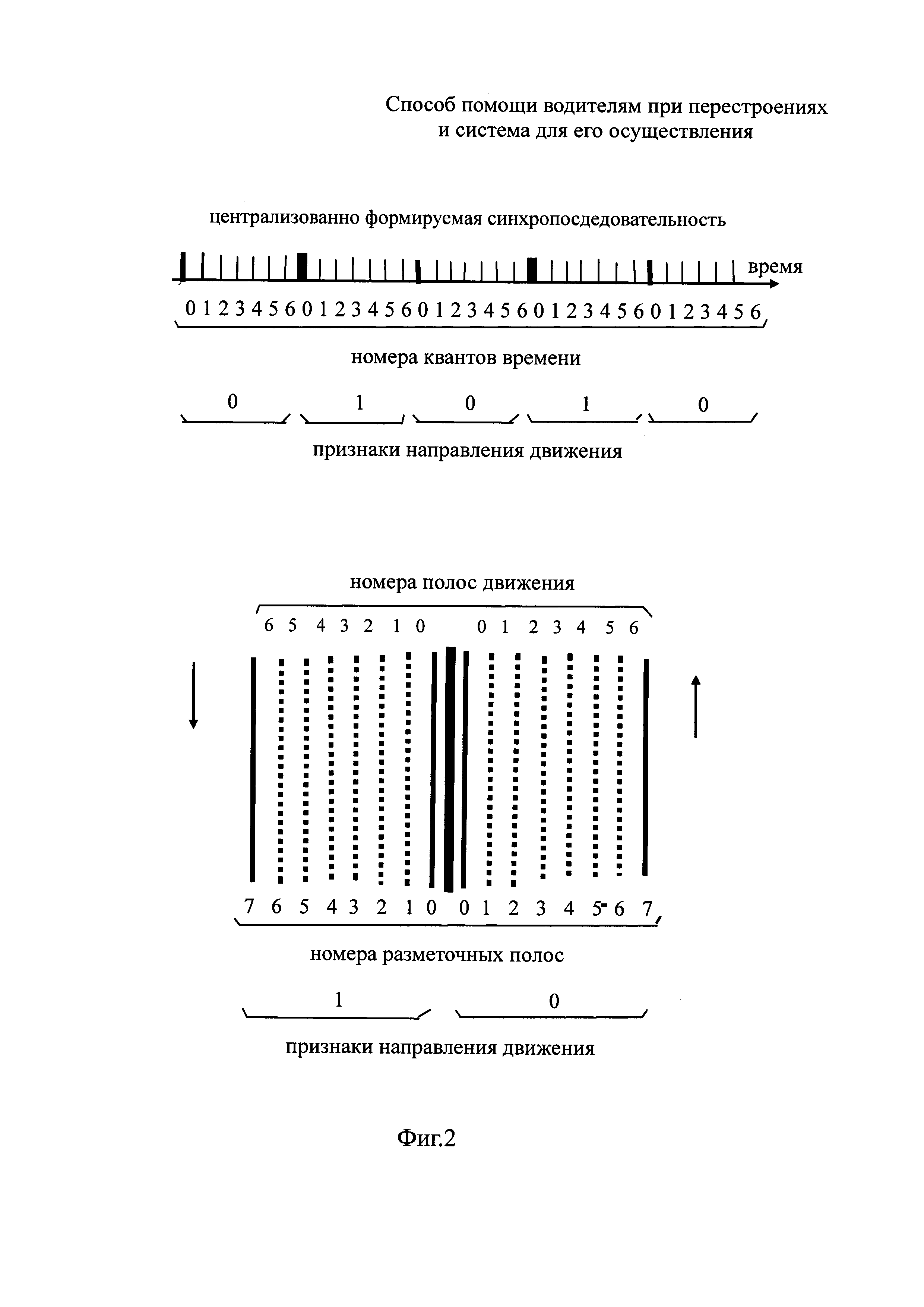
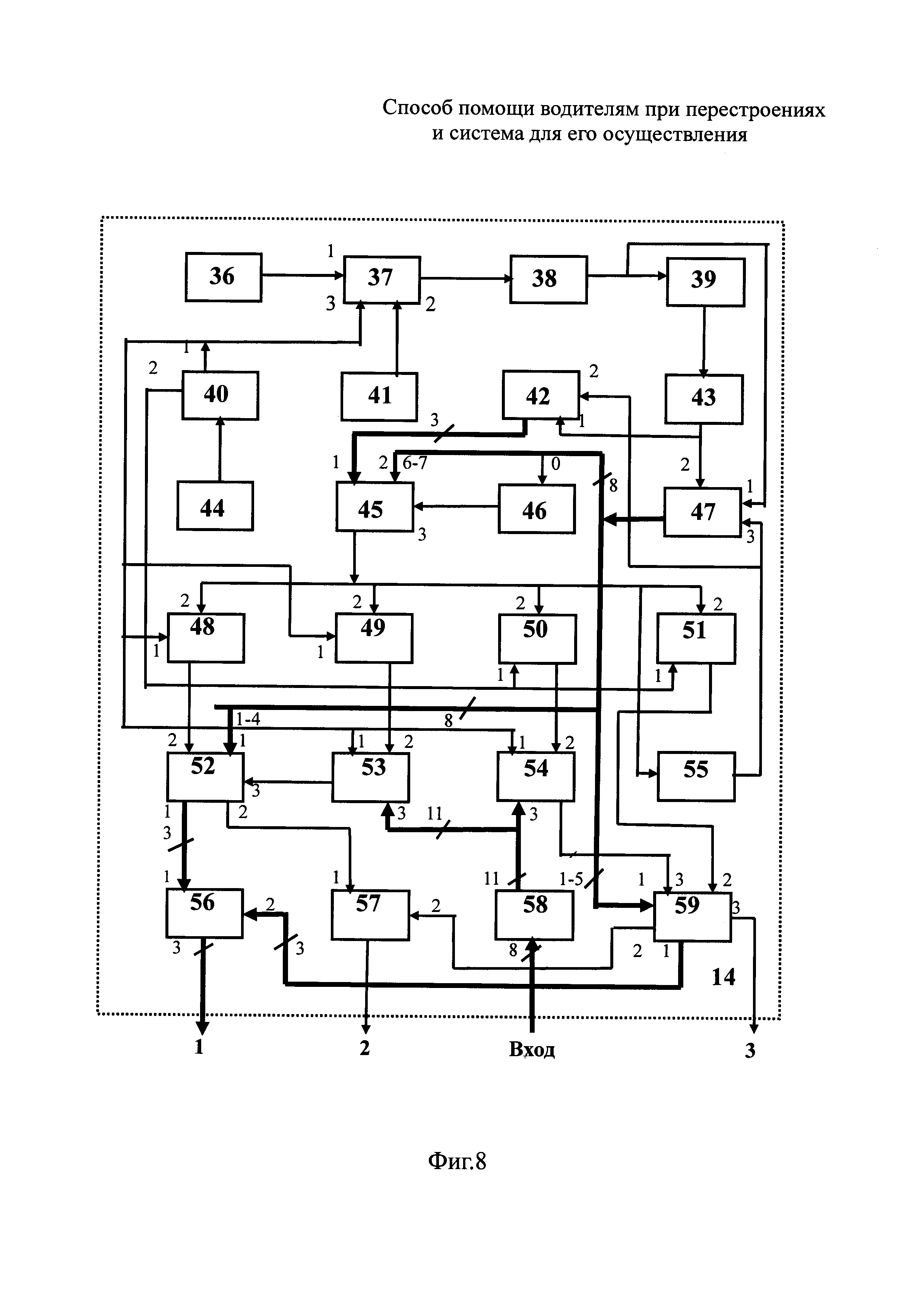
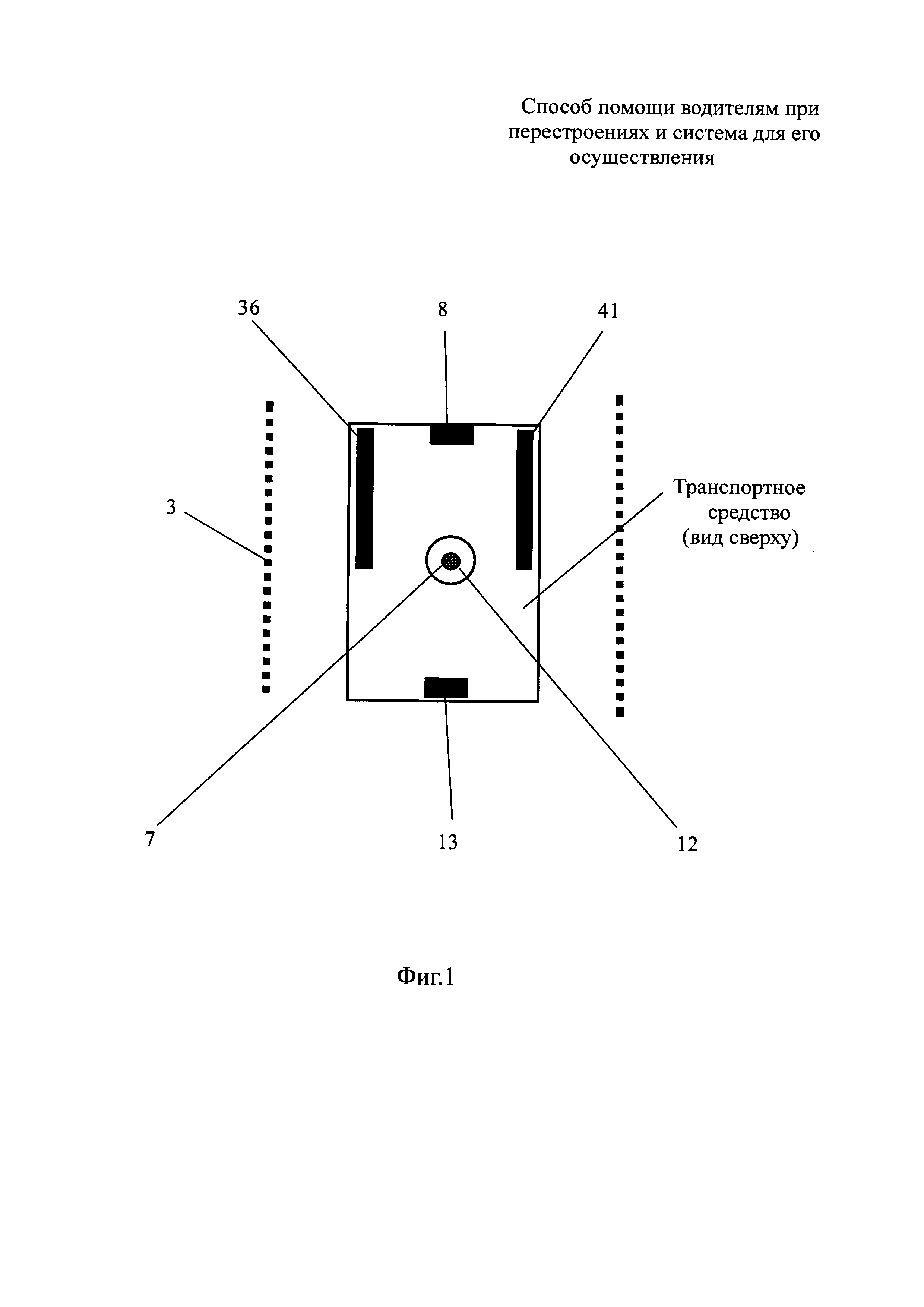
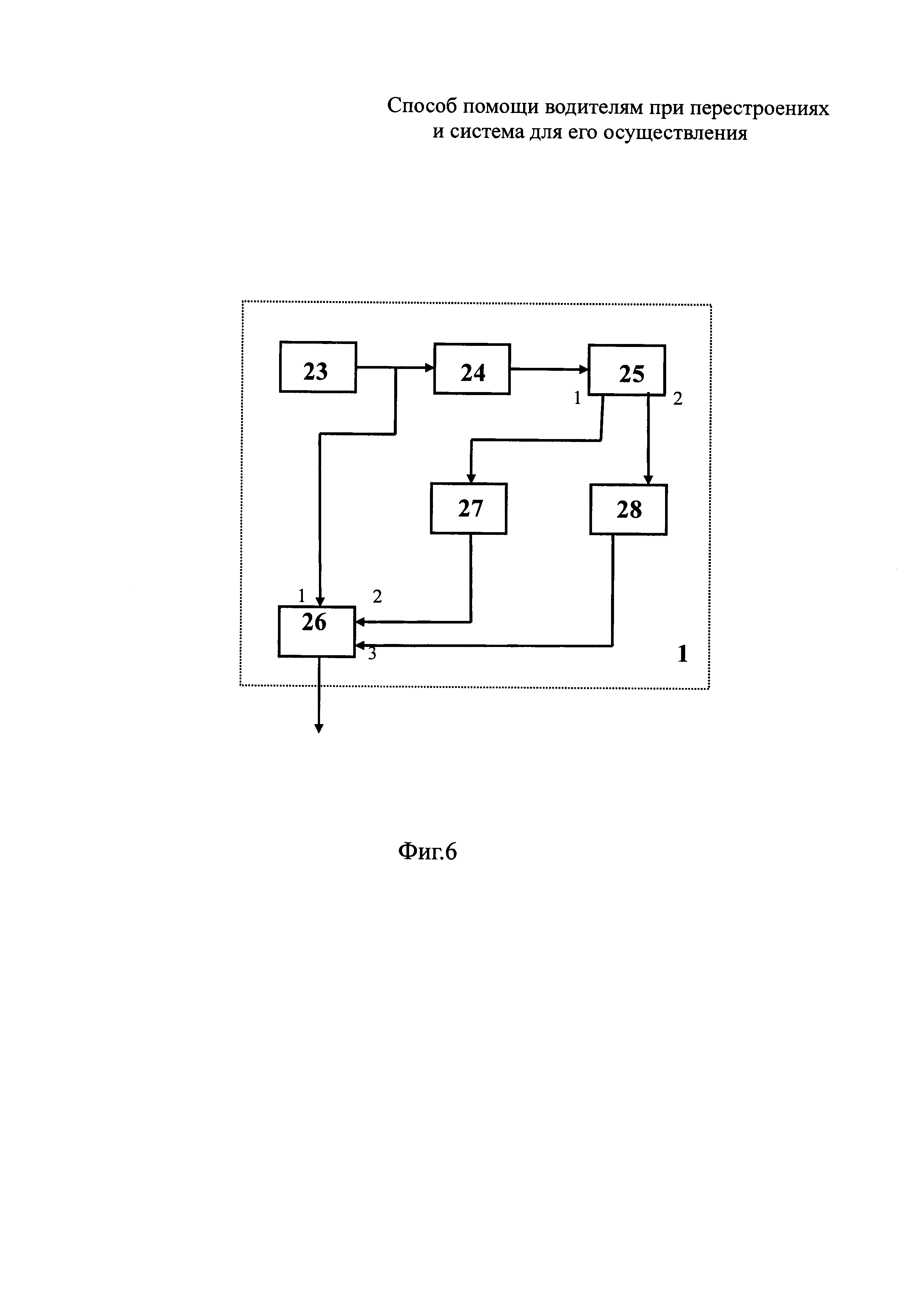
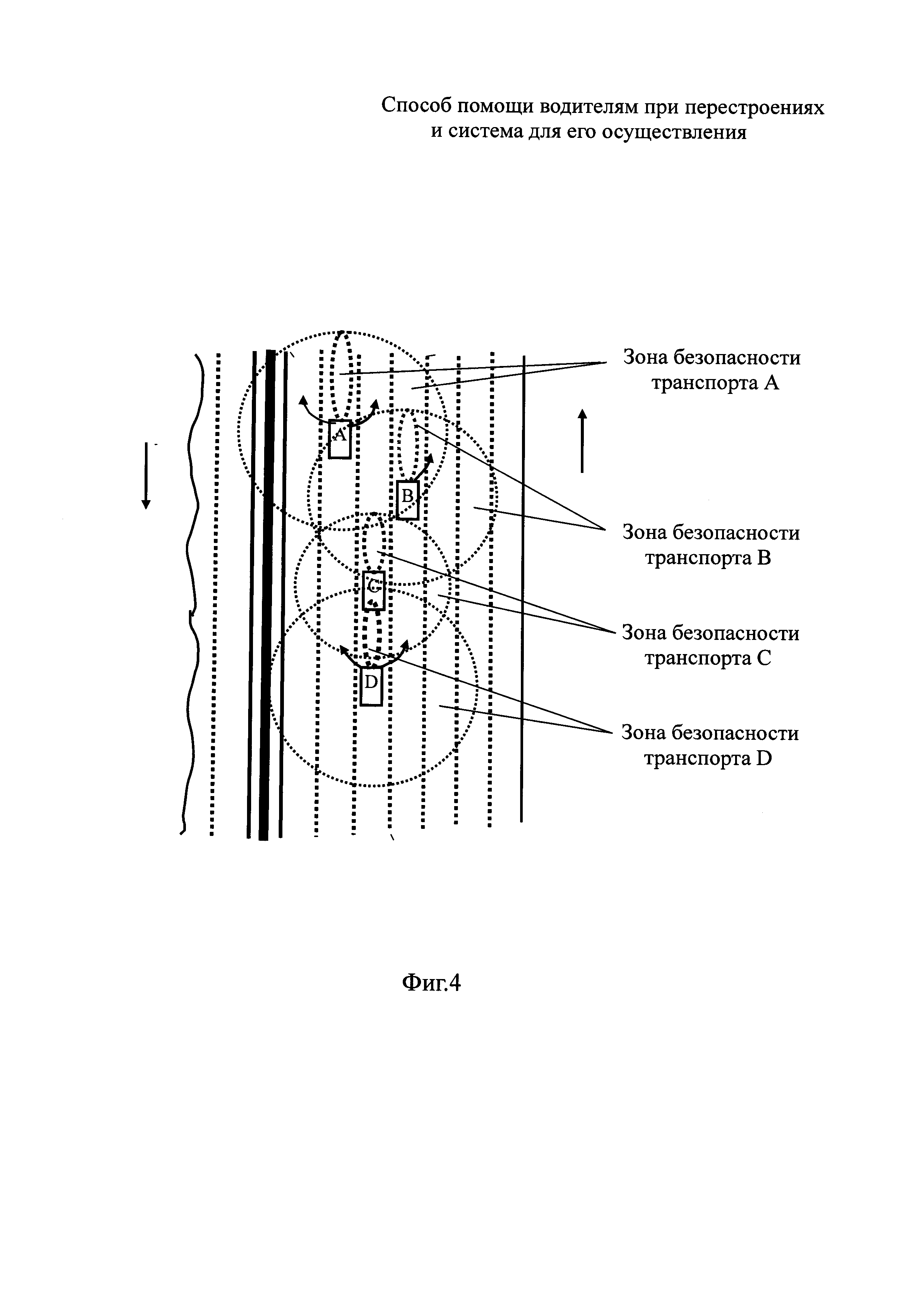
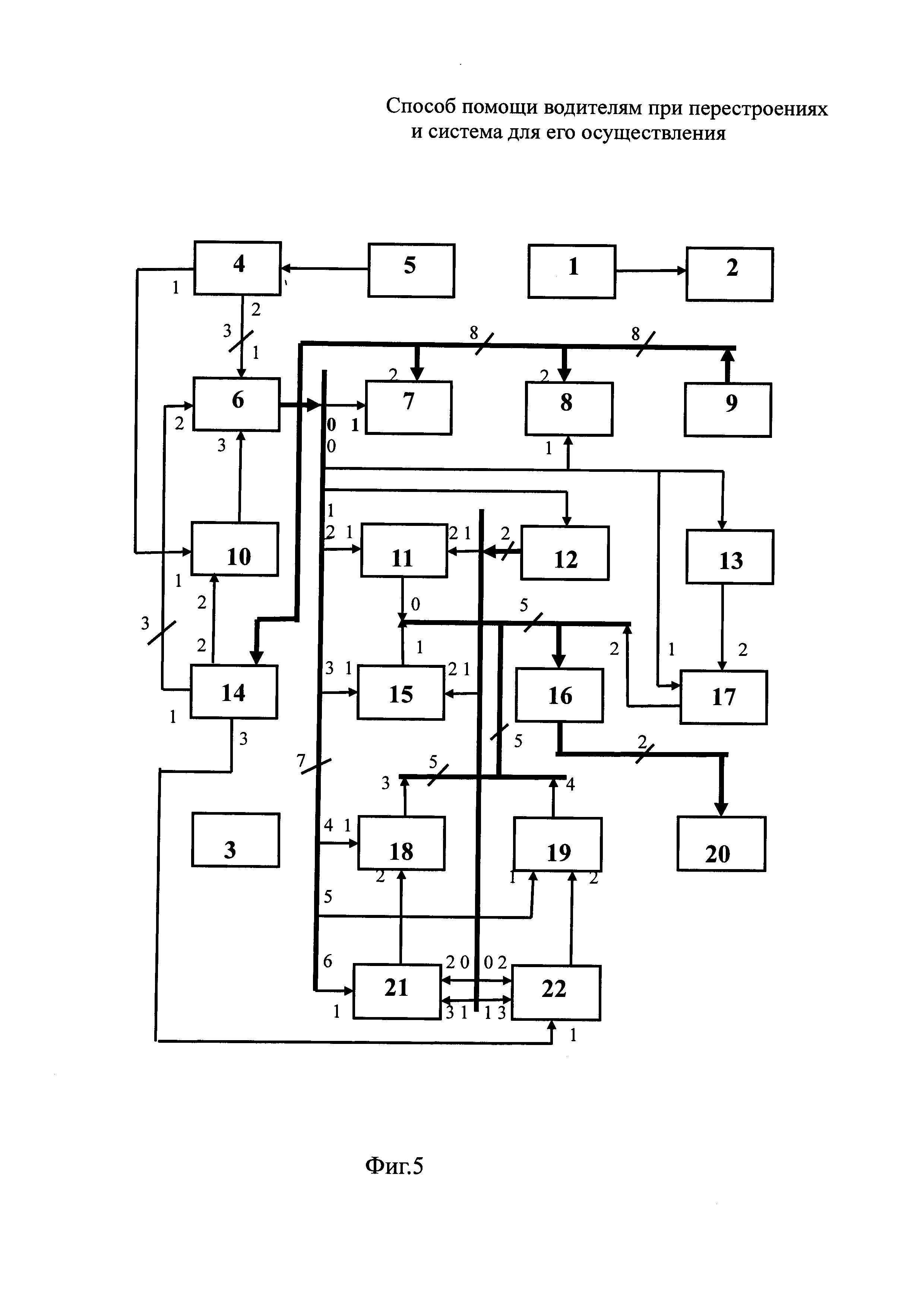
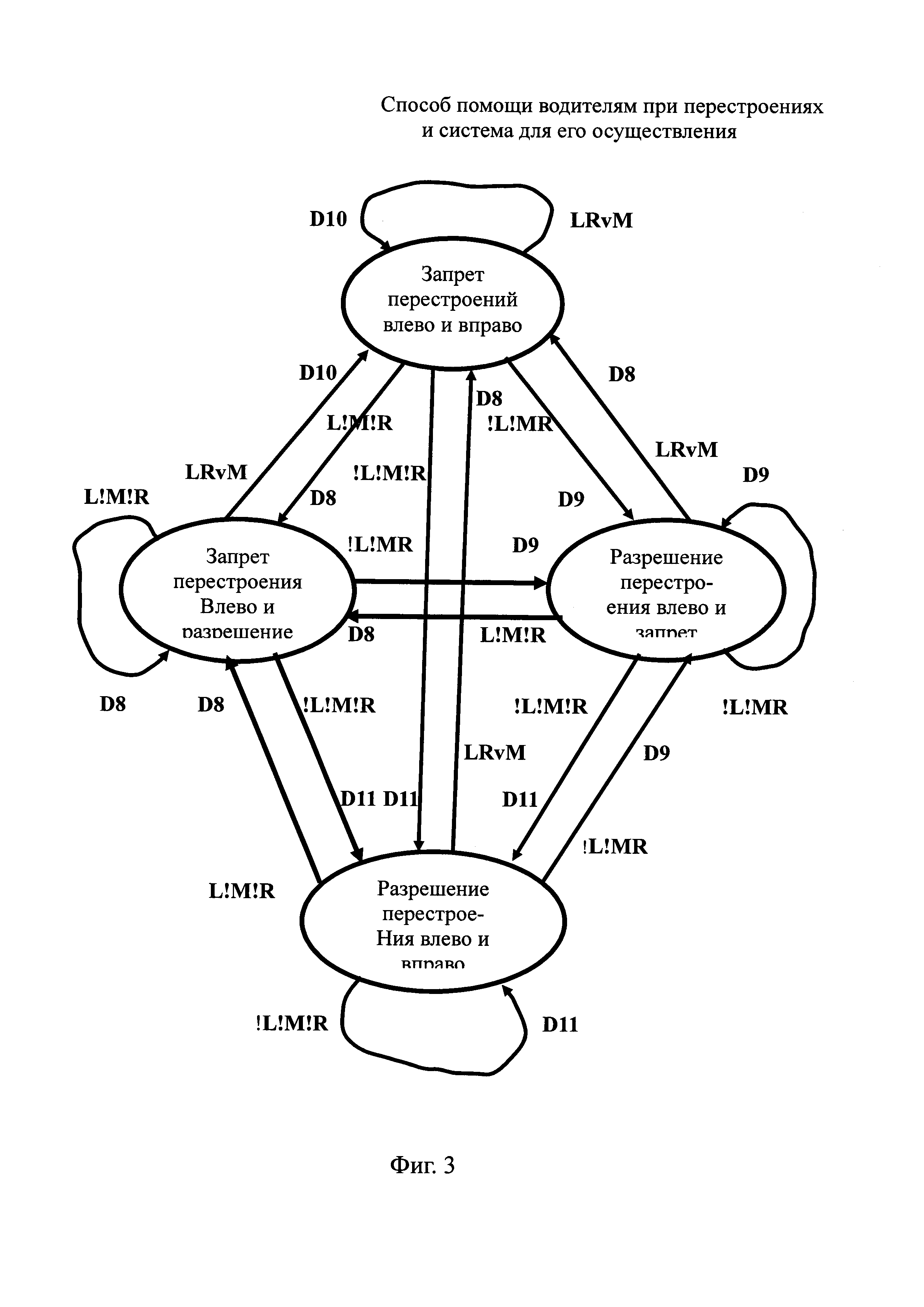
Квазимоноимпульсный вторичный радиолокатор
Линейный микроакселерометр
Способ антиколлизионной радиочастотной идентификации на поверхностных акустических волнах и система для его осуществления
Способ контроля пилотажно-навигационного комплекса и устройство для его осуществления
Способ автоматического группового вождения дорожных машин и система для его осуществления
Способ предотвращения неправомерных действий водителя транспортного средства и система для его осуществления
Способ группового вождения дорожных дронов и система для его осуществления
Способ автоматического группового вождения дорожных машин и система для его осуществления
Система автоматического управления дроном сопровождения водолаза
Устройство поперечного передвижения автомобиля
Способ и система автоматического управления дроном

