Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ
Вид РИД
Изобретение
Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Задача наведения ракеты на цель, заключающаяся в обеспечении сближении ракеты с целью и в конечном счете в совмещении их координат, решается с помощью различных способов (методов) наведения, определяющих требуемый закон движения ракеты, или, по-другому, кинематическую (опорную) траекторию ракеты. Способ наведения определяет траекторию и потребные перегрузки ракеты, аппаратурный состав системы наведения, а также точность наведения ракеты на цель.
Известен способ наведения телеуправляемой ракеты, при котором измеряют вне ракеты координаты цели и параметры движения ракеты относительно цели в виде координат отклонений ракеты от линии визирования цели (ЛВЦ) в каждой плоскости наведения и формируют сигналы (команды) управления ракетой пропорционально измеренным отклонениям ракеты от ЛВЦ, которые передают по линии телеуправления на ракету ([1] А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр. 29-30, 325-329, 364). Кинематическая траектория ракеты при этом способе задается методом наведения, определяемым в каждой плоскости наведения уравнением связи

где ϕЦ - угловая координата цели (угловое положение ЛВЦ);
ϕР - требуемая (кинематическая) угловая координата ракеты.
Такой способ наведения, называемый "совмещение трех точек", обладает недостатками, ограничивающими его применение при стрельбе ракетой по подвижным целям. Это вызвано тем, что задаваемая уравнением связи (1), опорная траектория наведения имеет большую кривизну и для движения по ней ракета должна иметь относительно большие располагаемые нормальные перегрузки, существенно зависящие от скорости движения цели, ее высоты полета и маневренных свойств, что предопределяет потребность в высокоманевренной ракете и значительные динамические ошибки в контуре управления ракетой.
Известен способ наведения управляемой ракеты, при котором непосредственно на ракете измеряют параметры движения ракеты относительно цели в виде угловой скорости линии визирования ракета-цель в каждой плоскости наведения и формируют сигналы управления ракетой пропорционально измеренной угловой скорости линии визирования ракета-цель ([1], стр. 28, 410-413, 424-426). Кинематическая траектория наведения ракеты при этом способе задается в каждой плоскости уравнением связи

где  - угловая скорость вращения вектора скорости ракеты;
- угловая скорость вращения вектора скорости ракеты;
 - угловая скорость вращения линии визирования ракета-цель;
- угловая скорость вращения линии визирования ракета-цель;
КН - коэффициент пропорциональности.
Этот способ наведения, называемый "пропорциональным сближением" ("пропорциональной навигацией"), реализуется непосредственно на борту самонаводящейся ракеты использованием специального координатора - головки самонаведения. При таком способе наведения потребная перегрузка ракеты в точке встречи стремится к нулю, при этом обеспечиваются близкая к прямолинейной траектория наведения и высокоточное наведение ракеты при малых промахах. Однако при этом аппаратурный состав ракеты за счет головки самонаведения усложняется и делает ракету дорогостоящим изделием, причем помехозащищенность системы самонаведения остается относительно низкой.
Наиболее близким к предлагаемому является способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, в каждой плоскости наведения формирование текущих параметров движения ракеты относительно цели в виде смещения кинематической траектории наведения ракеты относительно ЛВЦ, изменяемого пропорционально текущей разности дальностей до цели и ракеты, формирование координат отклонения ракеты от кинематической траектории наведения, формирование сигнала (команды) управления ракетой пропорционально отклонениям ракеты от кинематической траектории наведения с учетом ее смещения относительно ЛВЦ, передачу сигналов управления на ракету и наведение по ним ракеты ([2] А.М. Батков, И.Б. Тарханов. Системы теленаведения. - М.: Машиностроение, 1971, стр. 26-28, 32-44). Кинематическая траектория наведения ракеты при этом способе наведения задается в каждой плоскости наведения уравнением связи вида

где ϕУПР - угол упреждения.
Такой способ наведения называется наведением "с упреждением" (или "спрямлением траектории"), при котором смещение кинематической траектории наведения ракеты относительно ЛВЦ формируют в виде текущего значения угла упреждения ϕУПР, задаваемого соотношением

где A - параметр метода наведения, определяющий форму смещения кинематической траектории, значение которого задают исходя из требований, предъявляемых к виду отдельных участков траектории наведения;
ΔД=ДЦ-ДР - разность дальностей до цели ДЦ и ракеты ДР.
Известный способ, при которым сигналы управления ракетой формируют вне ракеты, обеспечивает кинематическую траекторию наведения, близкую к прямолинейной, и, соответственно, потребные перегрузки ракеты и динамическая ошибка наведения на этой траектории будут близки к нулю при выполнении условия, что скорости изменения углового положения цели и относительного сближения ракеты с целью постоянны. Однако в реальности такое предположение о характере движения цели и скорости сближения ракеты с целью не выполняется даже при обстреле прямолинейно летящей цели, не говоря уже о маневрирующей цели, и поэтому здесь также происходит искривление кинематической траектории наведения ракеты, возрастание потребных перегрузок от ракеты и увеличение динамической ошибки наведения. Другим более существенным недостатком известного способа является то, что при таком наведении ракеты имеется существенная зависимость величины конечного промаха от инструментальной ошибки формирования разности измеренных дальностей до цели и ракеты, которая всегда имеется в системе наведения. Также данный способ задает определенную форму траектории наведения ракеты, которая остается неизменной для всех условий стрельбы, что не позволяет при необходимости управлять углом встречи ракеты с целью. Указанные недостатки приводят к увеличению потребных перегрузок ракеты, снижают точность ее наведения, снижают эффективность поражающего воздействия боевой части и уменьшают зону поражения ракеты, что особенно характерно для перехвата скоростных и высоколетящих целей, что и ограничивает применение такого способа наведения телеуправляемой ракеты.
Задачей настоящего изобретения является снижение потребных перегрузок ракеты на траектории наведения, повышение точности ее наведения, создание рациональных условий встречи ракеты с целью и расширение условий применения телеуправляемой ракеты при перехвате скоростных и высоколетящих целей.
Решение поставленной задачи достигается тем, что в способе наведения телеуправляемой ракеты, включающем измерение координат цели и ракеты, в каждой плоскости наведения формирование текущих параметров движения ракеты относительно цели, формирование сигнала управления ракетой в соответствии с текущими параметрами движения ракеты относительно цели, передачу сигнала управления на ракету и наведение ракеты по сформированным сигналам управления, новым является то, что преобразуют измеренные координаты цели и ракеты в соответствующие прямоугольные координаты, определяют по прямоугольным координатам оценки текущих параметров движения цели и ракеты соответственно, формируют по оценкам параметров движения цели и ракеты текущие параметры относительного движения ракеты, определяют текущее время, оставшееся до встречи ракеты с целью, в каждой плоскости наведения формируют по параметрам относительного движения ракеты сигнал текущей угловой скорости линии визирования ракета-цель, определяют пропорционально сигналу угловой скорости линии визирования ракета-цель сигнал текущего промаха ракеты, определяют оценки текущего промаха и скорости его изменения, прогнозируют по оценкам текущего промаха и скорости его изменения с учетом текущего времени, оставшегося до встречи ракеты с целью, сигнал текущего промаха в точке встречи ракеты с целью, формируют пропорционально сигналу прогнозируемого текущего промаха в точке встречи сигнал текущей угловой скорости линии визирования ракета-цель в точке встречи, формируют сигнал программного текущего смещения угловой скорости линии визирования ракета-цель и затем формируют текущий сигнал управления ракетой пропорционально сигналу текущей угловой скорости линии визирования ракета-цель в точке встречи с учетом сигнала программного текущего смещения угловой скорости линии визирования ракета-цель.
В предлагаемом способе наведения телеуправляемой ракеты при определении оценок текущих параметров движения цели и ракеты задают соответственно модель их траекторий трехмерным вектором параметров движения, определяемую по каждой прямоугольной координате соответственно соотношениями вида

где 

 - текущие параметры траектории, соответственно координата, скорость и ускорение, составляющие трехмерный вектор параметров движения
- текущие параметры траектории, соответственно координата, скорость и ускорение, составляющие трехмерный вектор параметров движения 
T0 - временной шаг измерения и оценки координат;
n - текущий номер дискретного шага, n=1, 2, 3, …
В предлагаемом способе наведения телеуправляемой ракеты определяют оценки текущих параметров движения ракеты с учетом сформированного сигнала управления ракетой в соответствующей плоскости наведения.
Введение новых операций и их связей позволило по сравнению с известным способом снизить потребные перегрузки ракеты на траектории наведения, уменьшить динамическую ошибку наведения, создать рациональные углы встречи ракеты с целью и расширить условия применения телеуправляемой ракеты при перехвате скоростных и высоколетящих целей. Сущность предлагаемого изобретения заключается в том, что при теленаведении ракеты используется рациональный способ пропорционального сближения, реализуемый вне ракеты, т.е. в "наземной" части системы теленаведения, на основе использования измерений координат цели и ракеты и их обработки с соответствующим формированием сигналов управления ракетой.
Способ наведения телеуправляемой ракеты заключается в следующем.
После обнаружения цели в процессе ее сопровождения измеряют текущие координаты цели (например, радиолокатором в сферической системе координат): угол места ϕЦ[n], азимут qЦ[n] и дальность ДЦ[n]. После запуска ракеты также измеряют ее текущие координаты: угол места ϕР[n], азимут qР[n] и дальность ДР[n]. Далее измеренные координаты цели и ракеты соответственно преобразуют в прямоугольную систему координат относительно опорного направления, связанного с системой измерений координат, по известным соотношениям ([3] С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 172):

Затем определяют оценки текущих параметров движения цели и ракеты, под которыми понимаются фильтрованные прямоугольные координаты 
 и их первые
и их первые 
 и вторые
и вторые 
 производные, получаемые по результатам обработки соответствующих прямоугольных координат x[n], y[n], z[n]. Для оценки параметров движения цели и ракеты соответственно используют фильтр Калмана, определяемый известными соотношениями ([3], стр. 163-164), который осуществляет оценку параметров движения посредством выполнения совместных и взаимосвязанных операций динамической фильтрации и экстраполяции координат, что обеспечивает оптимальную обработку результатов измерений. Структура такого фильтра содержит в качестве своей составной части математическую модель траектории движения соответственно цели или ракеты (т.е. модель оцениваемого процесса движения). Свойства фильтра определяются используемой моделью траектории и его коэффициентом усиления (фильтрации), значение которого определяют также с учетом принятых ошибок измерения координат.
производные, получаемые по результатам обработки соответствующих прямоугольных координат x[n], y[n], z[n]. Для оценки параметров движения цели и ракеты соответственно используют фильтр Калмана, определяемый известными соотношениями ([3], стр. 163-164), который осуществляет оценку параметров движения посредством выполнения совместных и взаимосвязанных операций динамической фильтрации и экстраполяции координат, что обеспечивает оптимальную обработку результатов измерений. Структура такого фильтра содержит в качестве своей составной части математическую модель траектории движения соответственно цели или ракеты (т.е. модель оцениваемого процесса движения). Свойства фильтра определяются используемой моделью траектории и его коэффициентом усиления (фильтрации), значение которого определяют также с учетом принятых ошибок измерения координат.
При задании траектории движения цели и ракеты по каждой прямоугольной координате трехмерным вектором параметров движения в виде (5) (на примере координаты x) оцениваемыми параметрами движения будут прямоугольные координата x[n], скорость  и ускорение
и ускорение  соответственно цели или ракеты.
соответственно цели или ракеты.
Для такой модели траектории цели соотношения для фильтра Калмана имеют вид (записано для одной координаты, например, для координаты y)
- уравнения оценивания

- уравнения экстраполяции

где 
 - оценки координаты, скорости и ускорения цели соответственно;
- оценки координаты, скорости и ускорения цели соответственно;
yЦЭ[n], 
 - экстраполированные координата, скорость и ускорение цели соответственно;
- экстраполированные координата, скорость и ускорение цели соответственно;
k1Ц[n], k2Ц[n], k3Ц[n] - коэффициенты усиления (фильтрации).
Коэффициенты усиления k1Ц[n], k2Ц[n], k3Ц[n] вычисляются в текущем времени оценки параметров по известным соотношениям с учетом дисперсии ошибки измерения координат цели  . Дисперсия ошибки измерения координат
. Дисперсия ошибки измерения координат  является априорной величиной, характеризующей точность системы измерения координат, которую определяют предварительно статистически расчетным или экспериментальным путем.
является априорной величиной, характеризующей точность системы измерения координат, которую определяют предварительно статистически расчетным или экспериментальным путем.
При заданной соотношениями (5) модели траектории ракеты уравнения оценивания имеют вид, аналогичный виду соотношений (7), а уравнения экстраполяции с учетом текущего сигнала управления ракетой принимают вид
где 
 - оценки координаты, скорости и ускорения ракеты соответственно;
- оценки координаты, скорости и ускорения ракеты соответственно;

 - экстраполированные координата, скорость и ускорение ракеты соответственно;
- экстраполированные координата, скорость и ускорение ракеты соответственно;
λε[n-1] - сигнал управления ракетой в соответствующей плоскости наведения.
Введение в процесс экстраполяции координат ракеты ее текущих сигналов управления обеспечивает учет нормального ускорения ракеты развиваемого под действием этих команд управления, что повышает точность оценки параметров движения. При оценке параметров движения ракеты для расчета коэффициентов усиления k1Р[n], k2Р[n], k3Р[n] используется соответственно принятое априорное значение дисперсии ошибки измерения координат ракеты  .
.
В результате проведенных оценок получают параметры движения цели и ракеты в виде текущих оценок координат 
 и скоростей движения
и скоростей движения 
 соответственно.
соответственно.
Далее формируют по полученным оценкам параметров движения цели и ракеты текущие параметры относительного движения ракеты в виде разности соответствующих оценок координат и скоростей цели и ракеты по соотношениям
здесь ΔxЦР[n], ΔyЦР[n], ΔzЦР[n] - проекции относительной дальности ракета-цель на оси прямоугольной системы координат;
 - скорости изменения проекций относительной дальности;
- скорости изменения проекций относительной дальности;
ΔДЦР[n],  - относительная дальность ракета-цель и скорость ее изменения;
- относительная дальность ракета-цель и скорость ее изменения;
ΔVЦР[n] - относительная скорость ракета-цель.
Определяют текущее время tост[n], оставшееся до встречи ракеты с целью, используя относительную дальность ракета-цель и скорость ее изменения, например, по соотношению

Далее соответствующие операции проводят для двух плоскостей наведения ракеты. Формульные зависимости приведены для одной плоскости наведения - вертикальной плоскости.
По относительным параметрам движения ракеты (10) формируют сигналы текущих угловых скоростей вращения линии визирования ракета-цель 
 и углов линии визирования ракета-цель ϕЛВРЦ[n], qЛВРЦ[n] в соответствующих плоскостях наведения. Соответствующие соотношения для вертикальной плоскости наведения имеют вид
и углов линии визирования ракета-цель ϕЛВРЦ[n], qЛВРЦ[n] в соответствующих плоскостях наведения. Соответствующие соотношения для вертикальной плоскости наведения имеют вид


По полученным сигналам текущей угловой скорости линии визирования ракета-цель ωε[n], ωβ[n] по известной для метода пропорционального сближения зависимости ([1], стр. 479) определяют сигналы текущего промаха ракеты в двух плоскостях наведения hε[n], hβ[n], например для вертикальной плоскости наведения по соотношению

Затем с учетом текущего времени tост[n], оставшегося до встречи ракеты с целью, по сигналам текущего промаха hε[n], hβ[n] прогнозируют текущий промах в точке встречи ракеты с целью для каждой плоскости наведения. Прогнозирование проводят, например, по соотношению

где 
 - оценки текущего промаха и скорости его изменения в вертикальной плоскости наведения.
- оценки текущего промаха и скорости его изменения в вертикальной плоскости наведения.
Оценки текущего промаха и скорости его изменения в соответствующих плоскостях наведения 
 получают, например, использованием фильтра, определяемого соотношениями, аналогичными соотношениям (7) и (8), в котором входными координатами являются соответственно сигналы текущего промаха hε[n], hβ[n] (записано, например, для вертикальной плоскости наведения)
получают, например, использованием фильтра, определяемого соотношениями, аналогичными соотношениям (7) и (8), в котором входными координатами являются соответственно сигналы текущего промаха hε[n], hβ[n] (записано, например, для вертикальной плоскости наведения)
- уравнения оценивания
- уравнения экстраполяции
где 
 - оценки текущего промаха, скорости и ускорения его изменения соответственно;
- оценки текущего промаха, скорости и ускорения его изменения соответственно;

 - экстраполированные значения промаха, скорости и ускорения его изменения соответственно;
- экстраполированные значения промаха, скорости и ускорения его изменения соответственно;
k1П[n], k2П[n], k3П[n] - коэффициенты усиления (фильтрации).
По сигналам текущего прогнозируемого промаха в точке встречи hεП[n], hβП[n] определяют, в соответствии с зависимостью (13), сигналы прогнозируемой текущей угловой скорости линии визирования ракета-цель в точке встречи 
 для соответствующих плоскостей наведения по соотношению (записано для вертикальной плоскости наведения)
для соответствующих плоскостей наведения по соотношению (записано для вертикальной плоскости наведения)

Далее формируют также сигналы программного текущего смещения угловой скорости линии визирования ракета-цель в каждой плоскости наведения ωεСМ[n], ωβСМ[n] в соответствии, например, со следующей зависимостью (записано для вертикальной плоскости наведения)

где aε - весовой коэффициент;
g=9.81 м/с2 - ускорение силы тяжести.
Значение весового коэффициента aε определяет форму (требуемую степень искривления) траектории ракеты в плоскости наведения и, соответственно, угол подхода ракеты к цели. Его величина нормируется по отношению к ускорению силы тяжести и может задаваться в диапазоне значений 0…5 в зависимости от требуемых углов подхода ракеты к цели и ее располагаемой маневренности.
Затем формируют текущие сигналы управления ракетой λε[n], λβ[n] в каждой плоскости наведения пропорционально соответствующим сигналам прогнозированной текущей угловой скорости линии визирования ракета-цель в точке встречи 
 с учетом сформированных сигналов программного текущего смещения угловой скорости линии визирования ракета-цель ωεСМ[n], ωβСМ[n] в соответствии с соотношением (записано для вертикальной плоскости наведения)
с учетом сформированных сигналов программного текущего смещения угловой скорости линии визирования ракета-цель ωεСМ[n], ωβСМ[n] в соответствии с соотношением (записано для вертикальной плоскости наведения)

где: N=3-5 - коэффициент навигации, определяемый требуемой точностью наведения ракеты;
ωg[n] - угловая скорость, определяющая компенсационную составляющую действия силы тяжести, например, в виде

Далее сформированные текущие сигналы управления ракетой в каждой плоскости неведения λε[n], λβ[n] по линии телеуправления передают на ракету и осуществляют по ним ее наведение на цель.
Таким образом, предлагаемый способ наведения обеспечивает наведение телеуправляемой ракеты по методу пропорционального сближения, за счет чего снижаются потребные нормальные перегрузки ракеты и динамические ошибки наведения с обеспечением требуемых точностных характеристик наведения и условий встречи ракеты с целью, что расширяет зону поражения телеуправляемой ракеты и условия ее применения без дополнительного усложнения бортовой аппаратуры ракеты.
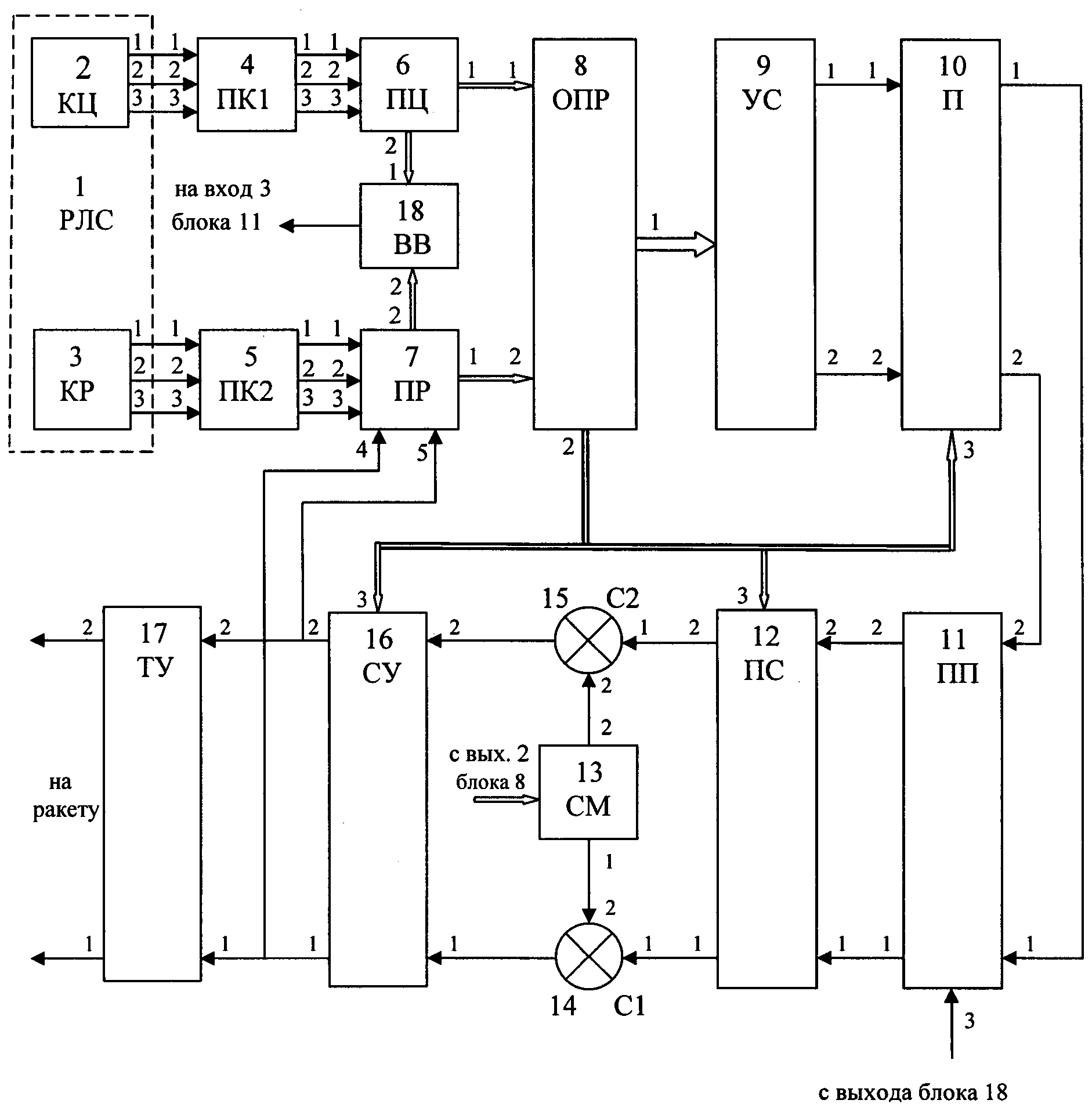
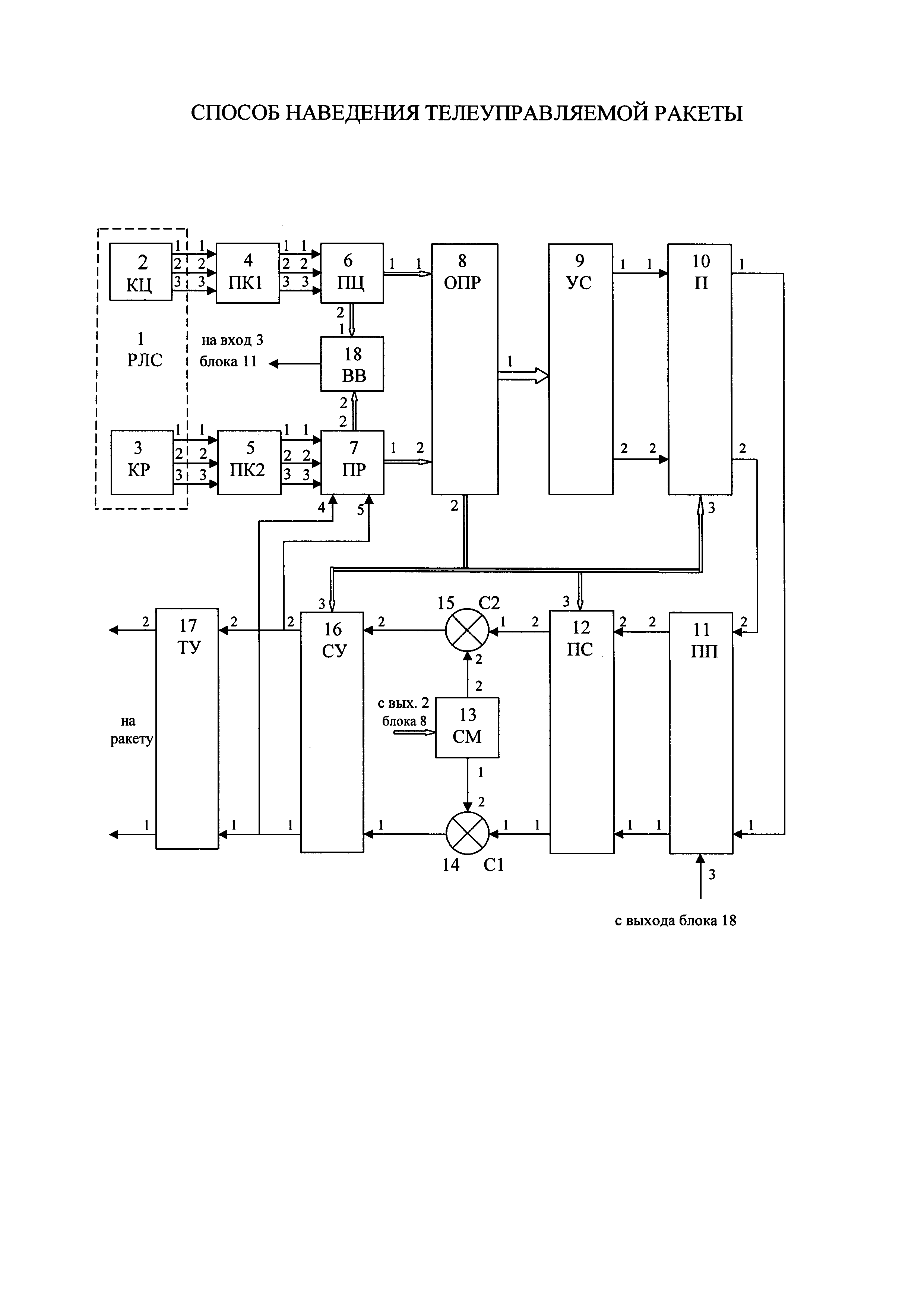
Функциональная схема, поясняющая предлагаемый способ наведения телеуправляемой ракеты, представлена на чертеже, на котором обозначено:
1 - радиолокатор сопровождения цели и ракеты (РЛС);
2 - координатор цели (КЦ);
3 - координатор ракеты (КР);
4, 5 - преобразователи координат (ПК1, ПК2);
6 - блок оценки параметров движения цели (ПЦ);
7 - блок оценки параметров движения ракеты (ПР);
8 - блок формирования параметров относительного движения ракеты (ОПР);
9 - блок формирования сигналов угловой скорости линии визирования ракета-цель (УС);
10 - блок определения сигналов текущего промаха ракеты (П);
11 - блок прогнозирования промаха ракеты в точке встречи (ПП);
12 - блок формирования сигналов прогнозируемой угловой скорости линии визирования ракета-цель в точке встречи (ПС);
13 - блок формирования сигналов программного смещения угловой скорости линии визирования ракета-цель (СМ);
14, 15 - сумматоры (C1, С2);
16 - блок формирования сигналов управления ракетой (СУ);
17 - устройство передачи сигналов управления на ракету (ТУ);
18 - блок определения времени, оставшегося до встречи ракеты с целью.
На чертеже двойные стрелки обозначают векторные (многомерные) связи (например, связь по первому выходу блока 6 содержит текущие параметры движения цели: оценки прямоугольных координат 
 и их первых
и их первых 
 и вторых
и вторых 
 производных), одинарные стрелки - скалярные (одномерные) связи (например, связь по первому выходу блока 4 содержит текущую прямоугольную координату цели xЦ[n]).
производных), одинарные стрелки - скалярные (одномерные) связи (например, связь по первому выходу блока 4 содержит текущую прямоугольную координату цели xЦ[n]).
Элементы радиолокатор сопровождения цели и ракеты 1, включающий координатор цели 2 и координатор ракеты 3, и устройство передачи сигналов управления (линия телеуправления) 17 представляют собой известные штатные элементы системы телеуправления ракетой ([1], стр. 30). Остальные блоки 4-16 и 18 представляют собой счетно-решающие устройства, воспроизводящие соответственно вышеприведенные математические соотношения, которые реализуется известными элементами электронных устройств и вычислительной системы обработки информации и управления, принципы построения, состав, структура и алгоритм функционирования которых описаны в [3], стр. 223-292.
Система работает следующим образом. Координатор цели 2 осуществляет сопровождение цели и измерение ее угловых координат и дальности. Координатор ракеты 3 осуществляет захват ракеты на сопровождение и измерение ее угловых координат и дальности. Измеренные текущие сферические координаты цели и ракеты в блоках 4 и 5 преобразуют соответственно в прямоугольные координаты цели и ракеты, которые поступают соответственно в блоки оценки текущих параметров движения цели и ракеты 6 и 7. На четвертый и пятый входы блока 7 поступают также текущие сигналы управления ракетой в двух плоскостях наведения, сформированные в блоке 16. Полученные оценки параметров движения цели и ракеты в виде текущих координат, скоростей и ускорений поступают соответственно на первый и второй входы блока формирования текущих параметров относительного движения ракеты 8, с выхода которого относительные параметры движения ракеты поступают в блок формирования сигналов текущей угловой скорости линии визирования ракета-цель 9. Далее сформированные сигналы угловой скорости линии визирования ракета-цель в двух плоскостях наведения поступают соответственно на первый и второй входы блока определения текущего промаха ракеты 10, где с учетом текущих относительной дальности ракета-цель и скорости их сближения, поступающих на третий вход блока 10 с выхода блока 8, определяют сигналы текущего промаха ракеты в каждой плоскости наведения, которые поступают соответственно в блок 11. В блоке 11, с учетом времени, оставшегося до встречи ракеты с целью, поступающего на третий вход блока 11 с выхода блока 18, определяют сигналы прогнозированного промаха в точке встречи ракеты с целью. Затем по сигналам текущего прогнозированного промаха в блоке 12 формируют сигналы текущей угловой скорости линии визирования ракета-цель в точке встречи, по которым в блоке формирования сигналов управления ракетой 16, с учетом сформированных соответствующих сигналов программного текущего смещения угловой скорости линии визирования ракета-цель (сумматоры 14 и 15), формируемых в блоке 13, и сигналов относительной дальности и скорости сближения ракеты с целью со второго выхода блока 8 формируют текущие сигналы управления ракетой в соответствующих плоскостях наведения. Сформированные сигналы управления посредством устройства 17 передаются на ракету. Ракета, отрабатывая принятые сигналы управления, наводится на цель.
Предлагаемое техническое решение обеспечивает повышение динамической точности наведения и расширение условий применения телеуправляемой ракеты, что выгодно отличает его от известных.






Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации
Устройство для подвода энергии с неподвижной части объекта на подвижную
Осколочно-фугасный снаряд
Двигательная установка
Способ инициирования бортовых систем управляемого снаряда и импульсный магнитоэлектрический генератор для его осуществления (варианты)
Устройство для вывода кабеля из боевого отделения к внешнему потребителю
Способ стрельбы ракетой, управляемой по лучу лазера
Способ документирования данных в многозадачной системе
Модуль фазированной антенной решетки
Способ повышения точности наведения вооружения боевого комплекса (варианты)
Способ механических испытаний узлов изделий и устройство для его реализации
Способ управления ракетой и блок рулевого привода (варианты)
Зенитный самоходный ракетно-пушечный комплекс
Устройство для заряжания автоматического оружия
Управляемый снаряд
Управляемый снаряд
Управляемый снаряд
Способ запуска управляемого снаряда
Управляемый снаряд
Способ формирования сигналов управления ракетой

