Результат интеллектуальной деятельности: Двухэтапный способ измерения координат цели и устройство для его осуществления
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации и могут быть использованы для сокращения времени обзора направления.
Обнаружить цель - это прежде всего обнаружить сигналы, отраженные от цели на фоне пассивных помех, измерить угловые координаты и дальность до нее.
Для обнаружения сигнала на фоне пассивных помех необходимо разрешение по скорости, для измерения угловых координат - разрешение по угловым координатам, а для измерения дальности - разрешение по дальности.
Разрешающая способность по угловым координатам зависит от параметров антенны (ширины ее луча), а разрешающая способность по скорости и дальности - от параметров сигнала.
Выполнение этих задач требует больших затрат времени, причем увеличение затрат времени для решения одной задачи приводит к сокращению для решения других.
При измерении угловых координат - азимута и угла места в длинноволновых радиолокационных станциях (РЛС), когда для определения угловой координаты используют антенну с узконаправленной диаграммой только в одной плоскости, используют два этапа зондирования пространства.
Так, известен двухэтапный способ измерения координат цели (в частности, с измерением угловых координат), применяемый в комплексе двух РЛС [Справочник по радиолокации. Ред. М. Сколник, т. 4, с. 68, М.: Сов. Радио, 1978 г.]. В этом способе одна РЛС имеет широкую диаграмму направленности антенны в угломестной плоскости и узконаправленную - в азимутальной, а вторая РЛС имеет широкую диаграмму направленности антенны в азимутальной плоскости и узконаправленную - в угломестной. Вторая РЛС выполняет функцию высотомера. На первом этапе первая РЛС обнаруживает цель и определяет дальность и только одну ее угловую координату. Эту информацию передают на вторую РЛС, которая на втором этапе в этом азимуте сканирует пространство в угломестной плоскости, обнаруживает цель на дальности, определенной первой РЛС, и определяет вторую ее угловую координату. Таким образом, в два этапа происходит определение двух угловых координат, а дальность до цели определяется по задержке отраженного от цели сигнала в обеих РЛС. По определенным дальности и углу места цели вычисляют ее высоту.
Этот способ успешно мог бы применяться в том случае, когда в осматриваемой зоне небольшое количество тихоходных целей.
В современных условиях предполагается массированный налет высокоскоростных целей. Поэтому были разработаны РЛС с фазированными антенными решетками (ФАР). ФАР в коротковолновых РЛС формирует диаграмму направленности антенны (ДНА) карандашного типа и обеспечивает одновременное определение двух угловых координат цели. Однако при этом количество направлений, которые необходимо осматривать такой РЛС, резко возрастает. Возрастает и время, необходимое для осмотра этих направлений, особенно при осмотре больших дальностей (работа с большими периодами повторения зондирующего сигнала). А в случае необходимости многократного зондирования одного направления это приводит к увеличению времени наблюдения и возникновению проблемы «импульсного голода» [Справочник по радиолокации. Ред. М. Сколник, т. 4, с. 50, 4-й абзац сверху, М.: Сов. Радио, 1978 г.]. Многократное зондирование необходимо для селекции по скорости движущейся цели в пассивных помехах [Справочник по радиолокации. Ред. М. Сколник, т. 3, с. 281, РЛС с селекцией движущихся целей, М.: Сов. Радио, 1979 г.]. Причем для исключения слепых скоростей необходимо не менее чем трехкратное зондирование [там же, с. 319].
Время, необходимое для осмотра направления, в основном, зависит от максимальной дальности обнаружения цели. Сократить это время можно при наличии априорных данных о дальности расположения цели на меньшей максимальной дальности.
Разрешающая способность по дальности и скорости зависит от параметров сигналов. Для обеспечения разрешения по дальности и по скорости используют протяженные широкополосные сигналы с внутриимпульсной (например, частотной) модуляцией. [Я.Д. Ширман, В.Н. Голиков. Основы теории обнаружения радиолокационных сигналов и измерения их параметров. М.: Сов. Радио, 1963 г., с. 5, 219, рис. 7.14]. Как видно из указанного рисунка, для повышения точности определения дальности необходимо увеличивать ширину спектра сигнала, а для повышения точности определения скорости необходимо увеличивать длительность сигнала. Противоречия между этими требованиями разрешаются при использовании протяженных сигналов, например, с частотной модуляцией. Однако есть ограничение на длительность сигнала - увеличивается мертвая (слепая) зона или минимальная дальность обнаружения [Справочник по радиолокации. Ред. М. Сколник, т. 1, с. 105, 4-й абзац снизу, М.: Сов. Радио, 1978 г.].
Таким образом, длительность зондирующего сигнала, определяющая разрешение по скорости, ограничивается допустимой величиной мертвой зоны, а возможность сокращения времени обзора направления (периода повторения зондирующего сигнала) ограничивается максимальной дальностью обзора этого направления. Одним из способов уменьшения мертвой зоны является использование когерентной пачки коротких импульсов [Я.Д. Ширман, В.Н. Голиков. Основы теории обнаружения радиолокационных сигналов и измерения их параметров. М.: Сов. Радио, 1963 г., с. 221, рис. 7.16]. Такая пачка позволяет обеспечить разрешение по скорости, но обладает неоднозначностью по дальности и для ее устранения требуются дополнительные затраты времени.
Наиболее близким к заявляемому способу является двухэтапный способ измерения координат цели, основанный на измерении дальности и повторном зондировании направления тем же сигналом на втором этапе, если на первом обнаружена цель при пониженном пороге, при этом принимают решение об обнаружении цели, если принятый сигнал превысил увеличенный порог второго этапа [Справочник по радиолокации. Ред. М. Сколник, т. 1, Двухэтапный обнаружитель, с. 200. М.: Сов. Радио, 1976 г.].
Суть этого способа состоит в том, что во время первого этапа фиксируют дальности, на которых превышен порог и на которых предположительно могут находиться цели. Если таковые имеются, то включают второй этап (повторное зондирование) и считают цель обнаруженной, если сигнал, отраженный от нее, превысит увеличенный порог. При этом передатчик излучает повторно сигналы через период повторения, определяемый максимальной дальностью в том же направлении, а принятые сигналы сравнивают с увеличенным порогом. Если на первом этапе не было превышения порога первого этапа (отсутствуют цели), то второй этап не включают.
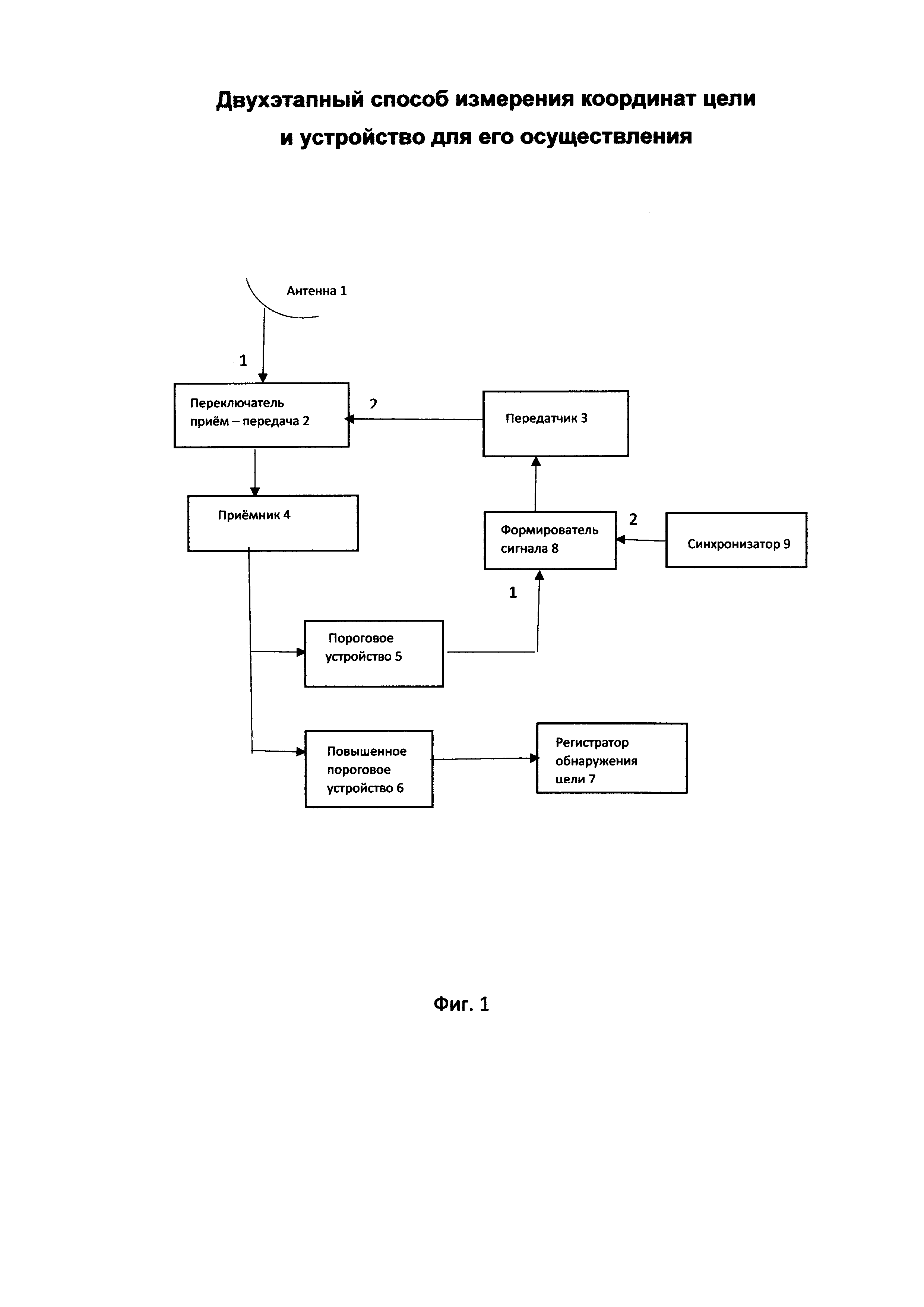
Наиболее близкое к заявляемому устройство для осуществления способа - прототипа (фиг. 1) содержит антенну 1, переключатель прием-передача 2, передатчик 3, приемник 4 пороговое устройство 5 и повышенное пороговое устройство 6, регистратор обнаружения цели 7, формирователь сигнала 8 и синхронизатор 9, выход антенны 1 соединен с первым входом переключателя прием- передача, а его выход соединен с входом приемника 4, выход приемника 4 соединен с соответствующими входами порогового устройства 5 и повышенного порогового устройства 6, выход порогового устройства 5 соединен с первым входом формирователя сигнала 8, выход которого соединен с входом передатчика 3, выход передатчика 3 соединен со вторым входом переключателя прием-передача 2, выход повышенного порогового устройства 6 соединен с регистратором обнаружения цели 7, выход синхронизатора 9 соединен со вторым входом формирователя сигнала 8.
На первом этапе принятый антенной 1, отраженный от облученной передатчиком 3 цели сигнал проходит через приемник 4 и поступает на пороговое устройство 5. Если сигнал превысил этот порог, то он поступает на первый вход схемы формирователя сигнала 8 и далее на вход передатчика 3 для излучения зондирующего сигнала второго этапа. На втором этапе принятый сигнал поступает на повышенное пороговое устройство 6 и в случае, если сигнал превышает его, поступает на регистратор обнаружения цели 7. При этом синхронизатор 9 задает постоянную тактовую частоту для формирователя сигнала 8.
Преимуществом такого двухэтапного способа и устройства для измерения координат цели являются повышение достоверности обнаружения целей, их положения при снижении вероятности ложного обнаружения и уменьшение затрат на осмотр одного направления за счет того, что в «пустых» направлениях сигналы второго этапа не излучают.
Недостаток этого способа и устройства состоит в том, что они теряют свое преимущество при работе в условиях действия интенсивных пассивных помех, поскольку вероятность превышения порога первого этапа отраженным от пассивной помехи сигналом близка к единице. Это приводит к тому, что во всех направлениях, в которых действует эта помеха, в том числе и «пустых», будут использованы сигналы двух этапов, что значительно увеличивает временные затраты на обеспечение селекции цели по скорости при осмотре направлений, пораженных пассивной помехой, так как для этого необходимо не менее трех зондирующих сигналов, чтобы исключить слепые скорости.
Таким образом, решаемой технической проблемой (техническим результатом) заявляемых изобретений является сокращение временных затрат на обнаружение подвижных целей и на измерение их координат в условиях действия пассивных помех.
Решение технической проблемы достигается тем, что на каждом этапе используют разные типы сигналов.
Техническая проблема (технический результат) решается тем, что в двухэтапном способе измерения координат цели согласно изобретению на первом этапе разрешают цель по скорости, а на втором - определяют дальность до нее, при этом параметры сигнала и (или) режим обнаружения цели на втором этапе формируют на основе информации об интервалах неоднозначности координат цели, полученных на первом этапе.
Техническая проблема (технический результат) решается также тем, что в двухэтапном способе измерения координат цели согласно изобретению частоту следования зондирующего сигнала устанавливают исходя из максимальной дальности до конца интервала ее неоднозначности.
Техническая проблема (технический результат) решается также тем, что в двухэтапном способе измерения координат цели согласно изобретению длительность зондирующего сигнала устанавливают исходя из минимальной дальности до начала интервала ее неоднозначности.
Техническая проблема (технический результат) решается также тем, что в двухэтапном способе измерения координат цели согласно изобретению ширину спектра зондирующего сигнала на втором этапе устанавливают минимально возможной, обеспечивающей устранение неоднозначности по дальности.
Техническая проблема (технический результат) решается также тем, что в двухэтапном способе измерения координат цели согласно изобретению на втором этапе просматривают только неоднозначные положения цели.
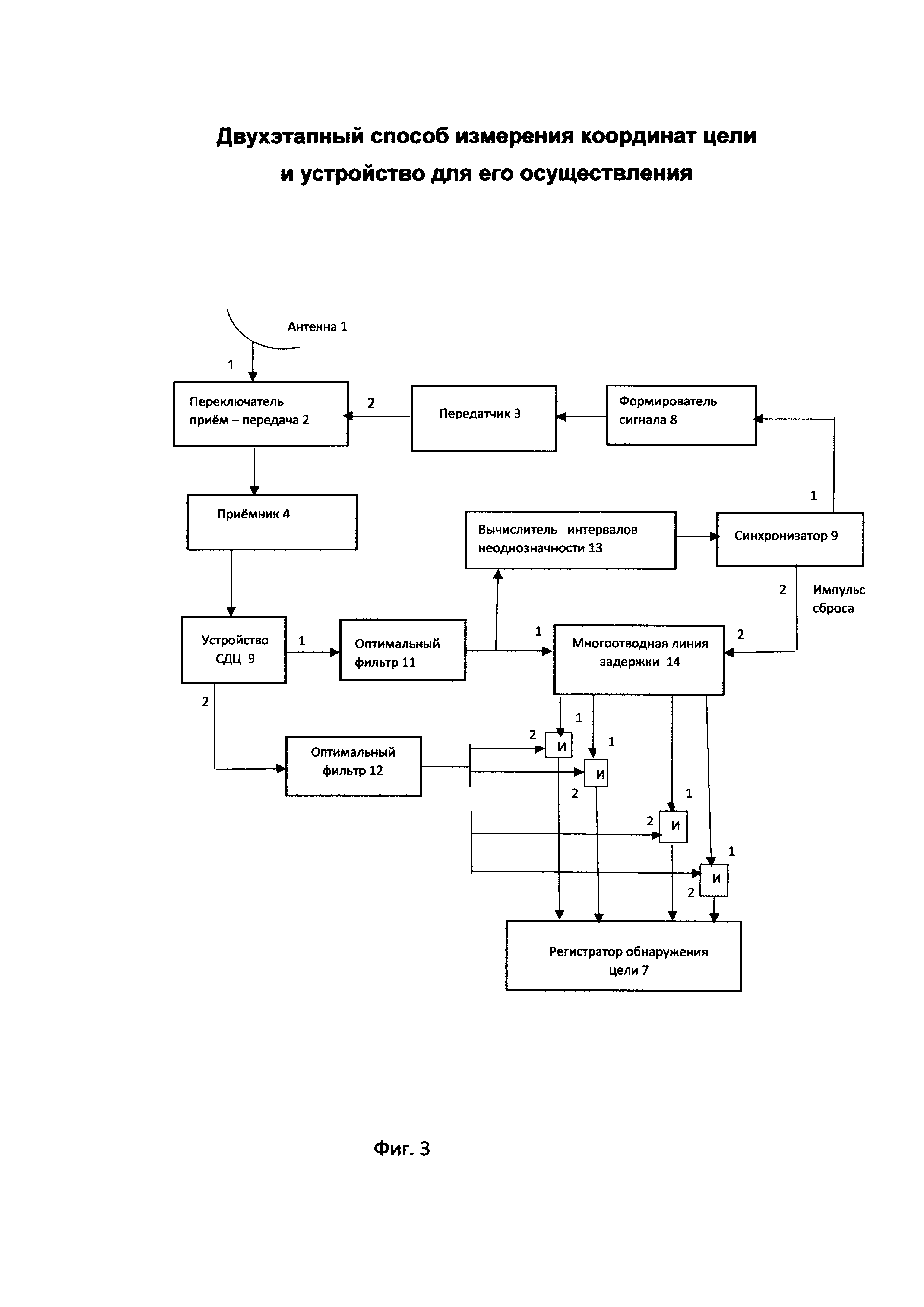
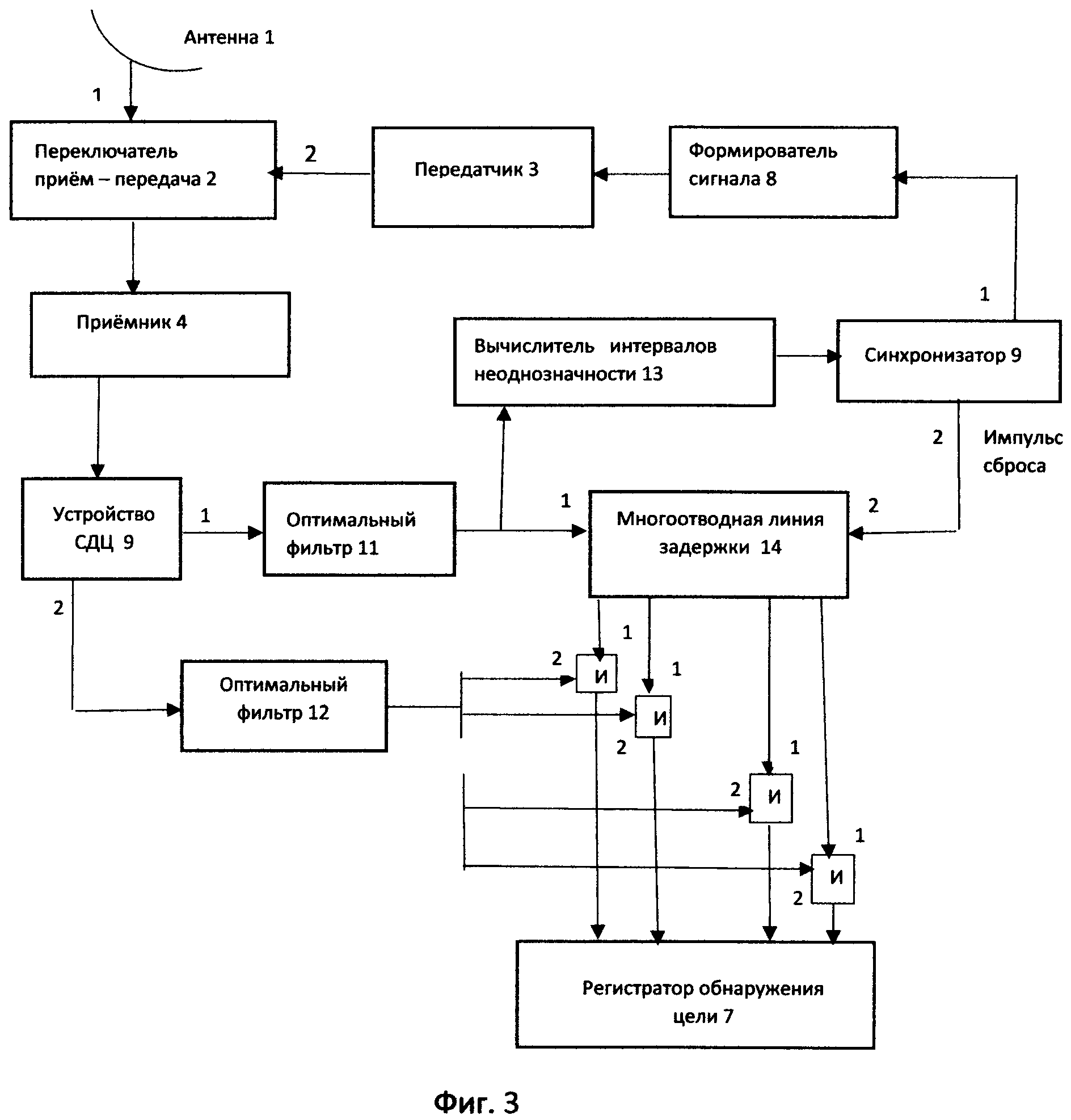
Техническая проблема (технический результат) решается тем, что в устройство для измерения координат цели, содержащее антенну, переключатель прием-передача, передатчик, приемник, регистратор обнаружения цели, формирователь сигнала и синхронизатор, согласно изобретению в него дополнительно введено устройство селекции движущихся целей (СДЦ), два оптимальных фильтра, многоотводную линию задержки с устройствами логического перемножения «И» в каждом отводе, вычислитель интервалов неоднозначности, выход антенны соединен с первым входом переключателя прием-передача, выход которого соединен с входом приемника, выход приемника соединен с входом устройства СДЦ, первый выход устройства СДЦ соединен с входом первого оптимального фильтра, а второй его выход соединен с входом второго оптимального фильтра, выход первого оптимального фильтра соединен с входом вычислителя интервалов неоднозначности и с входом многоотводной линии задержки, выход вычислителя интервалов неоднозначности соединен с входом синхронизатора, первый выход которого соединен с входом формирователя сигнала, а второй со вторым входом многоотводной линии задержки, выход формирователя сигнала соединен с входом передатчика, выход передатчика соединен со вторым входом переключателя прием-передача, выход второго оптимального фильтра соединен со вторыми входами устройств логического перемножения «И», первые входы которых соединены с соответствующими отводами многоотводной линии задержки, выходы устройств логического перемножения «И» соединены с соответствующими входами регистратора обнаружения цели.
Суть предлагаемых изобретений заключается в том, что используют свойство функции неопределенности в радиолокации.
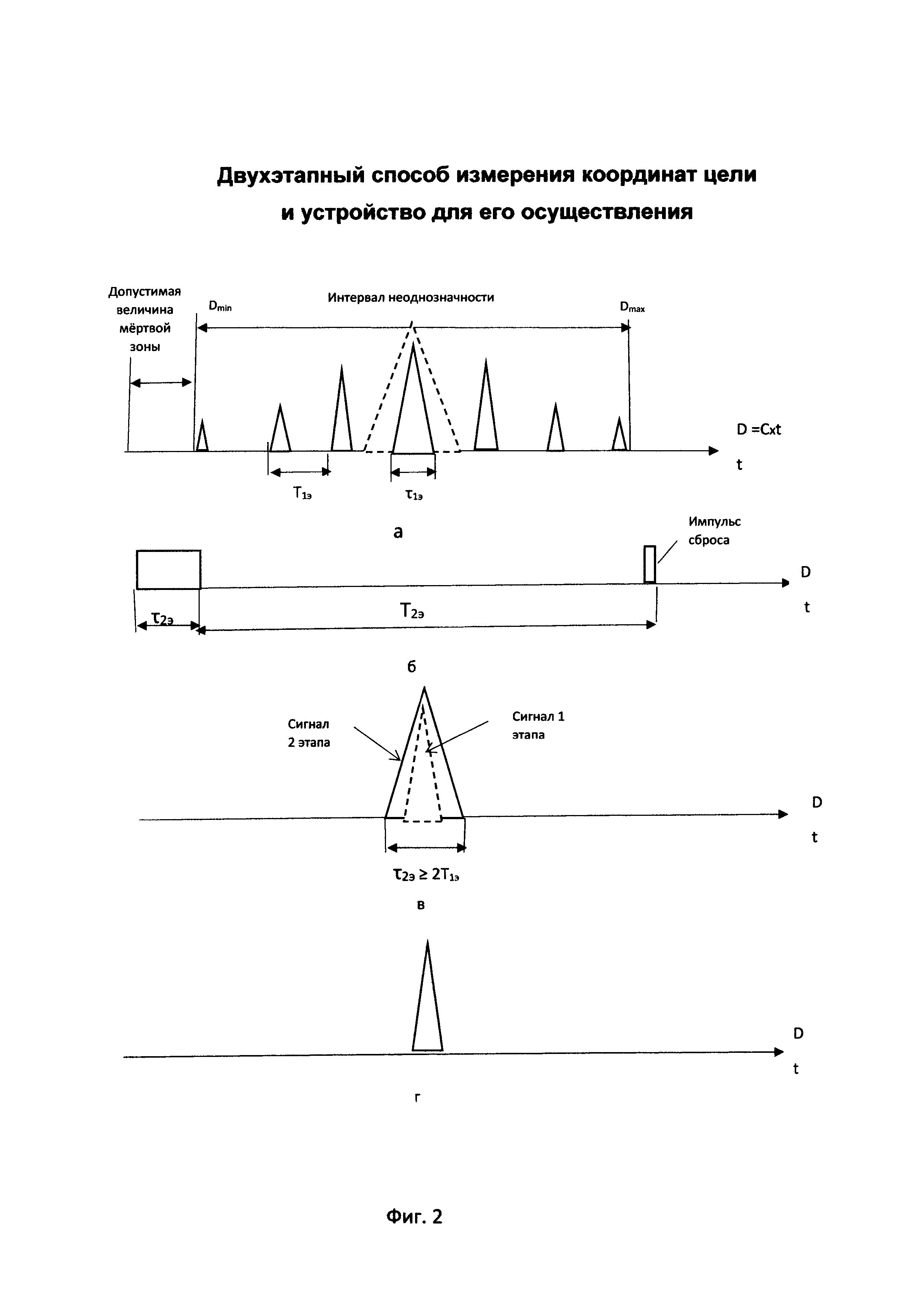
Разрешающая способность по дальности и по скорости зависит от параметров сигнала. Выбор параметров сигнала определяют из условий: длительность импульса - исходя из допустимого размера мертвой зоны; частоту повторения - исходя из максимальной дальности обзора. Для разрешения по скорости на первом этапе при зондировании применяют сигнал (фиг. 2а) с неоднозначностью по дальности (пачку сигналов с периодом повторения зондирующих сигналов Т1э). На этом этапе с помощью устройства селекции движущихся целей [Справочник по радиолокации, т. 3, ред. М. Сколник. М.: Сов. Радио, 1979 г., с. 281] определяют наличие движущихся целей, так как функция неопределенности для таких сигналов локализована на оси скоростей. Длительность частотно модулированного сигнала второго этапа ограничивается допустимым размером мертвой зоны и поэтому также допускает селекцию движущихся целей. Если на первом этапе цель обнаружена и имеет место неоднозначность по дальности (фиг. 2а) по оси D=С×t, где С - скорость света, то эта неоднозначность содержит информацию, которую используют на втором этапе. Информация заключается в том, что известны начало и конец пачки отраженных от цели сигналов по дальности (Dмин - Dмах - интервал неоднозначности), а это значит, что на втором этапе не осматривают дальности за пределами этого интервала (меньше Dмин и больше Dмах) (фиг. 2б). Это сокращает время обзора направления и снижает вероятность ложной тревоги. Положение принятого отраженного от цели сигнала второго этапа, после оптимальной фильтрации, показано на (фиг. 2в). Кроме того, интервал неоднозначности (Dmin-Dmax) содержит дискретные интервалы неоднозначного положения цели, размер которых определяется размером τ1Э импульсов когерентной пачки. Это позволяет ширину спектра сигнала второго этапа устанавливать минимально возможной, определяемой расстоянием между дискретными интервалами (фиг. 2а). Поэтому логически перемножают эти сигналы с отраженным широкополосным сигналом (осматривают только дискретные интервалы неоднозначности) и таким образом повышают точность и достоверность обнаружения (поскольку интервалы осмотра сокращаются, то сокращается и вероятность ложной тревоги) (фиг. 2г). При зондировании на втором этапе используют широкополосный сигнал с периодом повторения Т2э, потому что функция неопределенности для такого сигнала локализована на оси дальности. Но в данном случае можно использовать длинные сигналы, хотя и с минимально необходимой широкополосностью, так как имеется возможность повышения точности определения дальности за счет двухэтапности (фиг. 2г), а «длинные» сигналы позволяют улучшить разрешение сигнала цели и сигнала пассивной помехи по скорости [Д.Е. Вакман. Сложные сигналы и принцип неопределенности в радиолокации. М.: Сов. Радио, 1965 г., с. 65, второй абзац снизу], т.е. улучшить подавление пассивной помехи. При этом длительность отклика сигнала второго этапа после оптимальной фильтрации не должна превышать удвоенный период повторения импульсов в пачке Т1э (фиг. 2в).
Если на первом этапе подвижные цели не обнаружены, то второй этап не включают, что сокращает время обзора направления.
Таким образом решается техническая проблема и достигается технический результат.
Изобретение иллюстрируется чертежами.
На фиг. 1 приведена схема устройства прототипа.
На фиг. 2 приведены диаграммы, поясняющие вид, расстояние D=C×t и временное положение t сигналов первого и второго этапов.
На диаграмме (фиг. 2а) показана допустимая величина мертвой зоны Dмin, (пространство, где цели отсутствуют), неоднозначность определения дальности и ее максимальное значение в пределах интервала Dmin-Dmax, принятого при использовании пачки коротких когерентных импульсов сигнала первого этапа τ1э с периодом Т1э после прохождения через селектор движущихся целей и первый оптимальный фильтр. Пунктиром показано положение отраженных сигналов второго этапа, поскольку сигналы второго этапа обеспечивают однозначное определение дальности до цели, их положение совпадает по дальности (времени) с одним из задержанных импульсов первого этапа, соответствующего истинному положению цели.
На диаграмме (фиг. 2б) показаны зондирующие импульсы второго этапа длительностью τ2э с частотной модуляцией, периодом повторения Т2э и импульс сброса в конце второго этапа. Второй этап включают, если на первом обнаружены движущиеся цели.
На диаграмме (фиг. 2в) показано положение принятого сигнала второго этапа после оптимальной фильтрации относительно положения одного из сигналов первого этапа.
На (фиг. 2г) показан вид и положение принятого сигнала после логической операции «И» - перемножения принятых сигналов первого и второго этапов. Из диаграммы видно, что обеспечивается однозначное определение дальности до цели с точностью, определяемой для рассматриваемого примера длительностью импульса сигнала первого этапа.
На фиг. 3 приведена схема предлагаемого устройства.
Заявленное устройство (фиг. 3) содержит антенну 1, переключатель 2, передатчик 3, приемник 4, регистратор обнаружения цели 7 и формирователь сигнала 8, синхронизатор 9, устройство СДЦ 10, первый оптимальный фильтр 11 и второй оптимальный фильтр 12, вычислитель интервалов неоднозначности 13, многоотводная линия задержки 14 с устройствами «И» в каждом отводе для логического перемножения, выход антенны 1 соединен с первым входом переключателя прием-передача 2, выход которого соединен с входом приемника 4, выход приемника 4 соединен с входом устройства СДЦ 10, первый выход устройства СДЦ 10 соединен с входом первого оптимального фильтра 11, а второй его выход соединен с входом второго оптимального фильтра 12, выход первого оптимального фильтра 11 соединен с входом вычислителя интервалов неоднозначности 13 и с первым входом многоотводной линии задержки 14, выход второго оптимального фильтра соединен со вторыми входами устройств логического перемножения «И», выход вычислителя интервалов неоднозначности 13 соединен с входом синхронизатора 9, первый выход которого соединен с входом формирователя сигнала 8, а второй - со вторым входом многоотводной линии задержки 14, выход формирователя сигнала 8 соединен с входом передатчика 3, выход передатчика 3 соединен со вторым входом переключателя прием-передача 2, выходы многоотводной линии задержки 14 соединены соответственно с первыми входами устройств логического перемножения «И», выходы которых соединены с соответствующими входами регистратора обнаружения цели 7.
Заявленное устройство, осуществляющее заявляемый способ, работает следующим образом. Сигналы, принятые антенной 1, проходят через переключатель прием-передача 2, через приемник 4 и поступают на вход СДЦ 10. Сигналы с выхода СДЦ 10 поступают далее на вход оптимального для сигналов первого этапа фильтра 11 и на вход оптимального для сигналов второго этапа фильтра 12. При наличии движущихся целей, обнаруживаемых с помощью сигналов первого этапа в виде пачки когерентных импульсов с неоднозначностью по дальности (фиг. 2а), эти сигналы поступают на вычислитель интервалов неоднозначности 13 и, кроме того, на вход многоотводной линии задержки 14. Вычислитель интервалов неоднозначности 13 определяет протяженность интервала неоднозначности и дает команду на включение второго этапа с уменьшенным периодом излучения зондирующего сигнала. Кроме того, здесь формируется сигнал сброса в конце интервала неоднозначности для многоотводной линии задержки 14. Сброс происходит в конце второго этапа. В течение второго этапа происходит операция логического перемножения сигнала этого этапа с запомненными сигналами первого этапа на устройствах «И» (фиг. 2в). При этом регистратор обнаружения цели 7 фиксирует момент совпадения сигнала второго этапа с одним из сигналов первого этапа (фиг. 2г). Так происходит измерение координат движущихся целей в условиях воздействия пассивной помехи. Если движущиеся цели не обнаружены, то второй этап не включается.
Таким образом, использование на первом этапе сигнала с разрешением по скорости в условиях действия пассивной помехи позволяет не включать второй этап при отсутствии движущейся, цели, а знание интервала неоднозначности позволяет уменьшить на втором этапе период зондирования сигнала в данном направлении. Совместная обработка сигналов первого и второго этапов обеспечивает однозначное измерение координат цели в условиях действия пассивных помех при меньших затратах времени и с большей вероятностью, чем в прототипе.
Так решается поставленная техническая проблема и достигается технический результат.
Способ определения угловых координат цели (варианты)
Способ стабилизации вероятности ложной тревоги
Способ стабилизации вероятности ложной тревоги и устройство для его реализации
Способ стабилизации вероятности ложной тревоги (варианты) и устройство для его реализации (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ получения реагента для приготовления радиофармпрепарата на основе меченного технецием-99м ципрофлоксацина с сохранением его стабильности при длительном хранении
Способ радиолокационного обнаружения целей и комплекс для его реализации
Способ получения реагента для приготовления радиофармпрепарата на основе меченного технецием-99м ципрофлоксацина
Способ определения координат целей и комплекс для его реализации
Способ определения координат источника радиоизлучения-постановщика ответной помехи и способ определения координат целей, облучаемых постановщиком ответной помехи
Способ определения угловых координат цели (варианты)
Способ стабилизации вероятности ложной тревоги
Способ стабилизации вероятности ложной тревоги и устройство для его реализации
Способ стабилизации вероятности ложной тревоги (варианты) и устройство для его реализации (варианты)
Способ радиолокационного обзора пространства (варианты)
Способ радиолокационного обнаружения целей и комплекс для его реализации
Способ получения реагента для приготовления радиофармпрепарата на основе меченного технецием-99м ципрофлоксацина
Способ определения координат целей и комплекс для его реализации
Способ определения координат источника радиоизлучения-постановщика ответной помехи и способ определения координат целей, облучаемых постановщиком ответной помехи
Способ распознавания трассы цели и ложной трассы, формируемой синхронной ответной помехой (варианты)

