Результат интеллектуальной деятельности: Устройство для моделирования комбинаций разнотипных подвижных объектов
Вид РИД
Изобретение
Изобретение относится к специализированным устройствам вычислительной техники и может быть использовано для моделирования комбинаций разнотипных подвижных объектов.
Известно устройство [1], которое позволяет моделировать процесс перемещения подвижного объекта в районе дислокации в зависимости от времени суток, скорости движения и расстояния между точками стоянок.
Недостатком устройства является относительно узкие функциональные возможности, которые не позволяют моделировать комбинации разнотипных подвижных объектов.
Известно устройство [2], которое позволяет моделировать каталог разведки подвижных объектов.
Недостатком устройства является относительно узкие функциональные возможности, не позволяющие моделировать комбинации разнотипных подвижных объектов.
Наиболее близким к заявляемому устройству является устройство [3], которое позволяет моделировать каталог разведки разнотипных подвижных объектов.
Недостатком наиболее близкого технического решения являются относительно узкие функциональные возможности, не позволяющие моделировать комбинации разнотипных подвижных объектов.
Требуемый технический результат - расширение функциональных возможностей путем обеспечения моделирования комбинаций разнотипных подвижных объектов.
Требуемый технический результат достигается тем, что в устройство, содержащее регистр, датчик случайных чисел, генератор тактовых импульсов, блок расчета вероятности обнаружения подвижного объекта, блок сравнения, регистр памяти, блок расчета координат подвижного объекта, блок расчета размеров подвижного объекта, второй генератор тактовых импульсов, блок расчета квадратов отклонений размеров подвижного объекта, блок определения типа подвижного объекта, при этом выход генератора тактовых импульсов соединен с управляющим входом регистра сдвига и датчика случайных чисел, выход датчика случайных чисел соединен с первым входом блока сравнения, выход блока расчета вероятности обнаружения подвижного объекта соединен со вторым входом блока сравнения, первый выход МЕНЬШЕ блока сравнения соединен с управляющим входом блока расчета размеров подвижного объекта, второй выход МЕНЬШЕ блока сравнения соединен с управляющим входом регистра, первый информационный выход регистра сдвига соединен с первым входом блока расчета координат подвижного объекта, второй информационный выход регистра сдвига соединен со входом блока расчета вероятности обнаружения подвижного объекта, выход блока расчета координат подвижного объекта соединен с информационным входом регистра, на второй вход блока расчета координат подвижного объекта подано значение среднего квадратического отклонения ошибки определения координат подвижного объекта, третий и четвертый информационные выходы регистра сдвига соединены со вторым и третьим информационными входами блока расчета размеров подвижного объекта, управляющий выход блока расчета размеров подвижного объекта соединен со вторым генератором тактовых импульсов, а информационный выход блока расчета размеров подвижного объекта соединен с информационным входом блока расчета квадратов отклонений размеров подвижного объекта, выход второго генератора тактовых импульсов соединен со вторым управляющим входом регистра сдвига, пятый информационный выход регистра сдвига соединен со вторым входом блока расчета квадратов отклонений размеров подвижного объекта, а выход блока расчета квадратов отклонений размеров подвижного объекта соединен с информационным входом блока определения типа подвижного объекта, при этом выход блока определения типа подвижного объекта соединен со вторым информационным входом регистра памяти, введены третий генератор тактовых импульсов, блок расчета площади размещения подвижного объекта, блок расчета вероятности попадания подвижного объекта в заданную область, четвертый генератор тактовых импульсов, второй датчик случайных чисел, второй блок сравнения, блок определения комбинаций разнотипных подвижных объектов, при этом первый выход блока расчета координат подвижного объекта соединен со входом третьего генератора тактовых импульсов, а второй выход блока расчета координат подвижного объекта соединен с первым входом блока расчета вероятности попадания подвижного объекта в заданную область, выход третьего генератора тактовых импульсов соединен с третьим входом регистра сдвига, шестой выход регистра сдвига соединен со входом блока расчета площади размещения подвижного объекта, выход блока расчета площади размещения подвижного объекта соединен со вторым входом блока расчета вероятности попадания подвижного объекта в заданную область, первый выход блока расчета вероятности попадания подвижного объекта в заданную область соединен со входом четвертого генератора тактовых импульсов, а второй выход блока расчета вероятности попадания подвижного объекта в заданную область соединен со вторым входом второго блока сравнения, выход четвертого генератора тактовых импульсов соединен со входом второго датчика случайных чисел, а выход второго датчика случайных чисел соединен с первым входом второго блока сравнения, выход второго блока сравнения соединен со входом блока определения комбинаций разнотипных подвижных объектов, а выход блока определения комбинаций разнотипных подвижных объектов соединен с третьим входом регистра памяти.
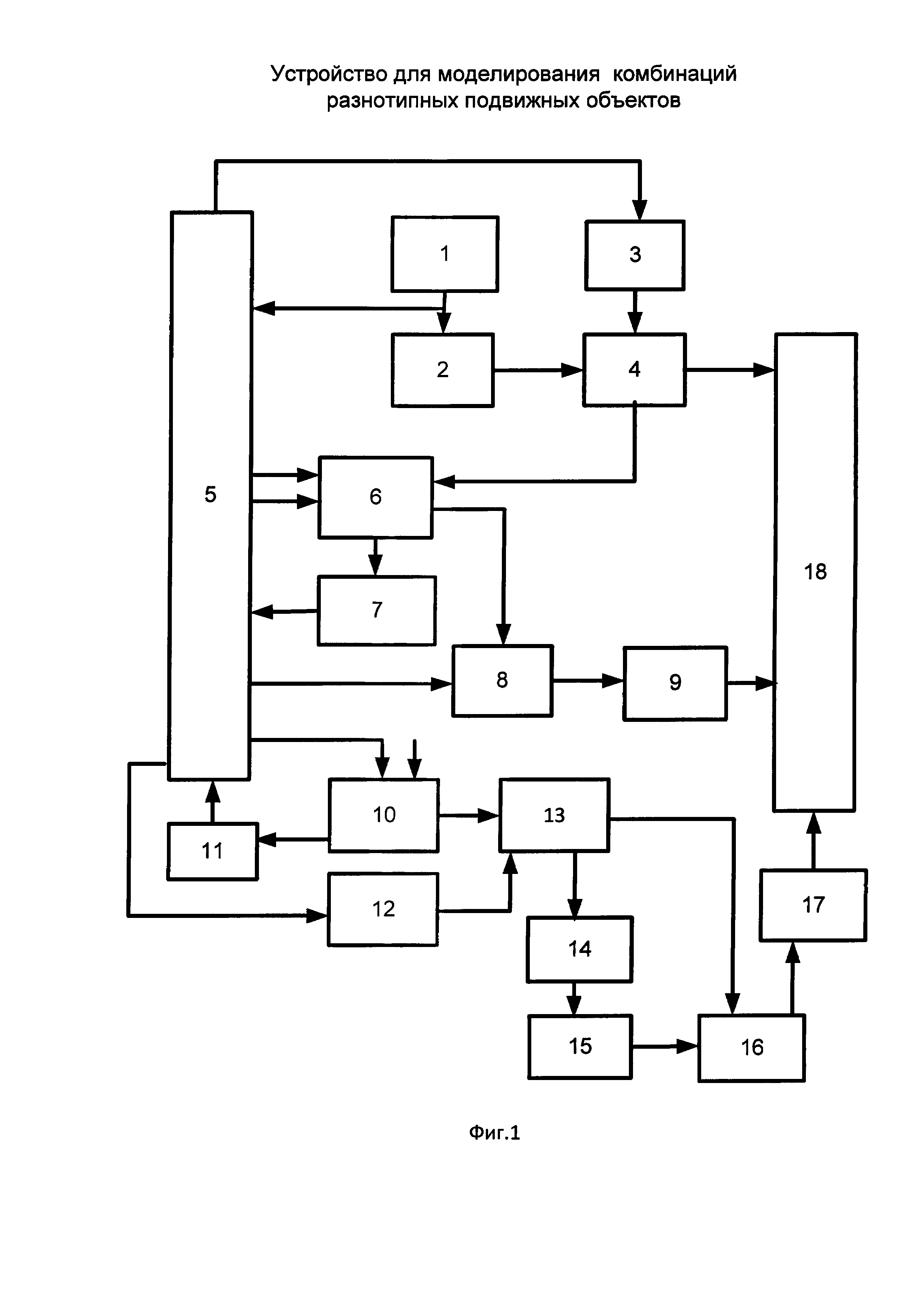
Сущность изобретения поясняется фиг. 1, где представлена структурная схема устройства для моделирования комбинаций разнотипных подвижных объектов.
Устройство для моделирования комбинаций разнотипных подвижных объектов содержит генератор 1 тактовых импульсов, датчик 2 случайных чисел, блок 3 расчета вероятности обнаружения подвижного объекта, блок 4 сравнения, регистр 5 сдвига, блок 6 расчета размеров подвижного объекта, генератор 7 тактовых импульсов, блок 8 расчета квадратов отклонений размеров подвижного объекта, блок 9 определения типа подвижного объекта, блок 10 расчета координат подвижного объекта, генератор 11 тактовых импульсов, блок 12 расчета площади размещения подвижного объекта, блок 13 расчета вероятности попадания подвижного объекта в заданную область, генератор 14 тактовых импульсов, датчик 14 случайных чисел, блок 16 сравнения, блок 17 определения комбинаций разнотипных подвижных объектов, регистр 18 памяти.
При этом выход генератора 1 тактовых импульсов соединен с входом опроса датчика 2 случайных чисел и управляющим входом регистра 5 сдвига, выход датчика 2 случайных чисел соединен с первым входом блока 4 сравнения, выход блока 3 расчета вероятности обнаружения подвижного объекта соединен со вторым входом блока 4 сравнения, первый выход МЕНЬШЕ блока 4 сравнения соединен с управляющим входом блока 6 расчета размеров подвижного объекта, второй выход МЕНЬШЕ блока 4 сравнения соединен с управляющим входом регистра 18 памяти, первый информационный выход регистра 5 сдвига соединен с первым входом блока 10 расчета координат подвижного объекта, второй информационный выход регистра 5 сдвига соединен с входом блока 3 расчета вероятности обнаружения подвижного объекта, третий и четвертый информационный выход регистра 5 сдвига соединен со вторым и третьим входами блока 6 расчета размеров подвижного объекта, пятый информационный выход регистра 5 сдвига соединен с вторым входом блока 8 расчета квадратов отклонений размеров подвижного объекта, управляющий выход блока 6 расчета размеров подвижного объекта соединен с управляющим входом генератора 7 тактовых импульсов, а информационный выход блока 6 расчета размеров подвижного объекта соединен с информационным входом блока 8 расчета квадратов отклонений размеров подвижного объекта, выход генератора 7 тактовых импульсов соединен со вторым управляющим входом регистра 5 сдвига, выход блока 8 расчета квадратов отклонений размеров подвижного объекта соединен с информационным входом блока 9 определения типа подвижного объекта, выход блока 9 определения типа подвижного объекта соединен со вторым информационным входом регистра 18 памяти, первый выход блока 10 расчета координат подвижного объекта соединен со входом генератора 11 тактовых импульсов, а второй выход блока 10 расчета координат подвижного объекта соединен с первым входом блока 13 расчета вероятности попадания подвижного объекта в заданную область, выход генератора 11 тактовых импульсов соединен с третьим входом регистра 5 сдвига, шестой выход регистра 5 сдвига соединен со входом блока 12 расчета площади размещения подвижного объекта, выход блока 12 расчета площади размещения подвижного объекта соединен со вторым входом блока 13 расчета вероятности попадания подвижного объекта в заданную область, первый выход блока 13 расчета вероятности попадания подвижного объекта в заданную область соединен со входом генератора 14 тактовых импульсов, а второй выход блока 13 расчета вероятности попадания подвижного объекта в заданную область соединен со вторым входом блока 16 сравнения, выход генератора 14 тактовых импульсов соединен со входом датчика 15 случайных чисел, а выход датчика 15 случайных чисел соединен с первым входом блока 16 сравнения, выход блока 16 сравнения соединен со входом блока 17 определения комбинаций разнотипных подвижных объектов, а выход блока 17 определения комбинаций разнотипных подвижных объектов соединен с третьим входом регистра 18 памяти.
Работает устройство для моделирования комбинаций разнотипных подвижных объектов следующим образом.
Предполагается, что имеются три вектора: 
содержащий географические координаты местоположения (широту х, долготу y), длину D, ширину S и предельное линейное разрешение на некотором фоне Δl n подвижных объектов, кроме того, средние квадратические отклонения ошибки измерения длины σD и ширины σS; вектор  содержащий математические ожидания длины M[Dj] и ширины M[Sj] для каждого из m типов подвижных объектов; вектор,
содержащий математические ожидания длины M[Dj] и ширины M[Sj] для каждого из m типов подвижных объектов; вектор,  ,содержащий размеры области размещения объектов по длине ld и ширине ls из μ областей.
,содержащий размеры области размещения объектов по длине ld и ширине ls из μ областей.
Указанные вектора значений перед началом работы устройства загружаются в регистр 5 сдвига в виде массива чисел.
При запуске устройства от внешнего источника, не показанного на фиг. 1, генератор 1 тактовых импульсов выдает импульсы на вход датчика 2 случайных чисел, в котором генерируются равномерно распределенные числа ζ в интервале от 0 до 1, которые последовательно передаются на вход блока 4 сравнения [3].
Принято, что вероятность обнаружения подвижного объекта РОБ на некотором фоне зависит от соотношения размеров (ширина, длина) обнаруживаемого объекта и предельного линейного разрешения в изображении подвижного объекта [2]. Из регистра 5 сдвига в блок 3 расчета вероятности обнаружения подвижного объекта загружаются соответствующие данные и осуществляется расчет вероятности обнаружения i-го подвижного объекта [3].
В блоке 4 происходит сравнение значений ζ, и Poбi. Если ζ<Poбi, то считается, что i-й подвижный объект обнаружен. Выполнению этого условия соответствует уровень логической единицы на выходе блока 4 сравнения [3].
Одновременно, в блоке 10 расчета координат подвижного объекта [3] определяются возможные координаты местоположения обнаруженного подвижного объекта (Xpi, Ypi) и передаются в блок 13 расчета вероятности попадания обнаруженного подвижного объекта в область μ. Одновременно, в блок 12 расчета площади размещения подвижного объекта по тактирующему сигналу от генератора 11 тактовых импульсов поступают из регистра 5 размеры областей μ размещения подвижных объектов, где рассчитываются координаты границ областей μ и площадь каждой из областей μ. Координаты границ каждой из областей μ передаются в блок 13, где они участвуют в определении вероятности попадания обнаруженного подвижного объекта в область μ.
Одновременно, возможные результаты измерения длины Di* ширины Si* обнаруженного подвижного объекта в блоке 6 расчета размеров подвижного объекта определяются по формулам [3]:


где νD=N[0, σD] и νS=N[0, σS] - случайные величины, распределенные по нормальному закону распределения с математическими ожиданиями равными 0 и средними квадратическими отклонениями σD и σS соответственно.
Возможные результаты измерения длины Di* и ширины Si* обнаруженного подвижного объекта передаются в блок 8 расчета квадратов отклонений размеров подвижного объекта. Одновременно, в данный блок по тактирующему сигналу от генератора 7 тактовых импульсов поступают из регистра 5 математические ожидания длины M[Dj] и ширины M[Sj] для каждого из m типов подвижных объектов. В блоке 8 расчета квадратов отклонений размеров подвижного объекта производится расчет суммы квадратов отклонений измеренных ширины и длины обнаруженного подвижного объекта от математических ожиданий ширины и длины, соответствующих каждому из m типов подвижного объекта по формуле [3]:

где j=[1,m] - номер типа подвижного объекта.
Величины квадратов отклонений размеров подвижного объекта Δj для каждого из m типов поступают в блок 9 определения типа подвижного объекта, в котором происходит их сравнение и определяется номер типа подвижного объекта k, соответствующий минимальному значению квадратов отклонений [3]:

Номер типа подвижного объекта k передается в регистр 18, где он записывается в него, причем запись возможных координат местоположения обнаруженного подвижного объекта (Xpi, Ypi) и его типа k в регистр 18 производится по тактирующему сигналу от генератора l тактовых импульсов. В регистре 18 они записываются, создавая тем самым первую часть записи комбинации разнотипных подвижных объектов.
В блоке 13 вероятность попадания обнаруженного подвижного объекта в область μ определяется по функции нормального закона распределения:

где FT(*) - значение функции нормального закона распределения;
xПГ - координаты правой границы области μ;
xЛГ - координаты левой границы области μ;
yВГ - координаты верхней границы области μ;
yНГ - координаты нижней границы области μ;
Ex - срединное отклонение координат границ области μ по оси x;
Ey - срединное отклонение координат границ области μ по оси y.
Срединные отклонения зависят от геометрических размеров подвижного объекта и определяются в блоке 13 по формулам:

Блок 13 выдает значения вероятности попадания обнаруженного подвижного объекта в области μ в блок 17 определения комбинаций разнотипных подвижных объектов.
Одновременно, генератор 14 тактовых импульсов выдает импульсы на вход датчика 15 случайных чисел, в котором генерируются равномерно распределенные числа ε в интервале от 0 до 1, которые последовательно передаются на вход блока 16 сравнения.
В блоке 16 происходит сравнение значений ε и Pnon i. Если ε<Pnon i, то считается, что i-й подвижный объект попал в область μ. Выполнению этого условия соответствует уровень логической единицы на выходе блока 16 сравнения.
В блоке 17 определения комбинаций разнотипных подвижных объектов происходит распределение подвижных объектов по областям μ в соответствии с максимальным значением вероятности Pnon i:

Число генерирующих импульсов генератора 1 тактовых импульсов соответствует числу n ячеек регистра 5 сдвига, число генерирующих импульсов генератора 7 тактовых импульсов соответствует числу m ячеек регистра 5 сдвига, число генерирующих импульсов генератора 11 тактовых импульсов соответствует числу μ ячеек регистра 5 сдвига, а число генерирующих импульсов генератора 14 тактовых импульсов соответствует числу n ячеек регистра 5 сдвига.
При окончании генерации в регистре 18 сформировался требуемые комбинации разнотипных подвижных объектов.
Таким образом, благодаря введению новых блоков и связей достигается требуемый технический результат - расширение функциональных возможностей за счет моделирования комбинаций разнотипных подвижных объектов.
Источники информации
1. RU №2298825, 2005 года.
2. RU №2353970, 2007 года.
3. RU №2544761, 2013 года.
Устройство для моделирования комбинаций разнотипных подвижных объектов, содержащее регистр, датчик случайных чисел, генератор тактовых импульсов, блок расчета вероятности обнаружения подвижного объекта, блок сравнения, регистр памяти, блок расчета координат подвижного объекта, блок расчета размеров подвижного объекта, второй генератор тактовых импульсов, блок расчета квадратов отклонений размеров подвижного объекта, блок определения типа подвижного объекта, при этом выход генератора тактовых импульсов соединен с управляющим входом регистра сдвига и датчика случайных чисел, выход датчика случайных чисел соединен с первым входом блока сравнения, выход блока расчета вероятности обнаружения подвижного объекта соединен со вторым входом блока сравнения, первый выход МЕНЬШЕ блока сравнения соединен с управляющим входом блока расчета размеров подвижного объекта, второй выход МЕНЬШЕ блока сравнения соединен с управляющим входом регистра, первый информационный выход регистра сдвига соединен с первым входом блока расчета координат подвижного объекта, второй информационный выход регистра сдвига соединен со входом блока расчета вероятности обнаружения подвижного объекта, выход блока расчета координат подвижного объекта соединен с информационным входом регистра, на второй вход блока расчета координат подвижного объекта подано значение среднего квадратического отклонения ошибки определения координат подвижного объекта, третий и четвертый информационные выходы регистра сдвига соединены со вторым и третьим информационными входами блока расчета размеров подвижного объекта, управляющий выход блока расчета размеров подвижного объекта соединен со вторым генератором тактовых импульсов, а информационный выход блока расчета размеров подвижного объекта соединен с информационным входом блока расчета квадратов отклонений размеров подвижного объекта, выход второго генератора тактовых импульсов соединен со вторым управляющим входом регистра сдвига, пятый информационный выход регистра сдвига соединен со вторым входом блока расчета квадратов отклонений размеров подвижного объекта, а выход блока расчета квадратов отклонений размеров подвижного объекта соединен с информационным входом блока определения типа подвижного объекта, при этом выход блока определения типа подвижного объекта соединен со вторым информационным входом регистра памяти, отличающееся тем, что, в него дополнительно введены третий генератор тактовых импульсов, блок расчета площади размещения подвижного объекта, блок расчета вероятности попадания подвижного объекта в заданную область, четвертый генератор тактовых импульсов, второй датчик случайных чисел, второй блок сравнения, блок определения комбинаций разнотипных подвижных объектов, при этом первый выход блока расчета координат подвижного объекта соединен со входом третьего генератора тактовых импульсов, а второй выход блока расчета координат подвижного объекта соединен с первым входом блока расчета вероятности попадания подвижного объекта в заданную область, выход третьего генератора тактовых импульсов соединен с третьим входом регистра сдвига, шестой выход регистра сдвига соединен со входом блока расчета площади размещения подвижного объекта, выход блока расчета площади размещения подвижного объекта соединен со вторым входом блока расчета вероятности попадания подвижного объекта в заданную область, первый выход блока расчета вероятности попадания подвижного объекта в заданную область соединен со входом четвертого генератора тактовых импульсов, а второй выход блока расчета вероятности попадания подвижного объекта в заданную область соединен со вторым входом второго блока сравнения, выход четвертого генератора тактовых импульсов соединен со входом второго датчика случайных чисел, а выход второго датчика случайных чисел соединен с первым входом второго блока сравнения, выход второго блока сравнения соединен со входом блока определения комбинаций разнотипных подвижных объектов, а выход блока определения комбинаций разнотипных подвижных объектов соединен с третьим входом регистра памяти.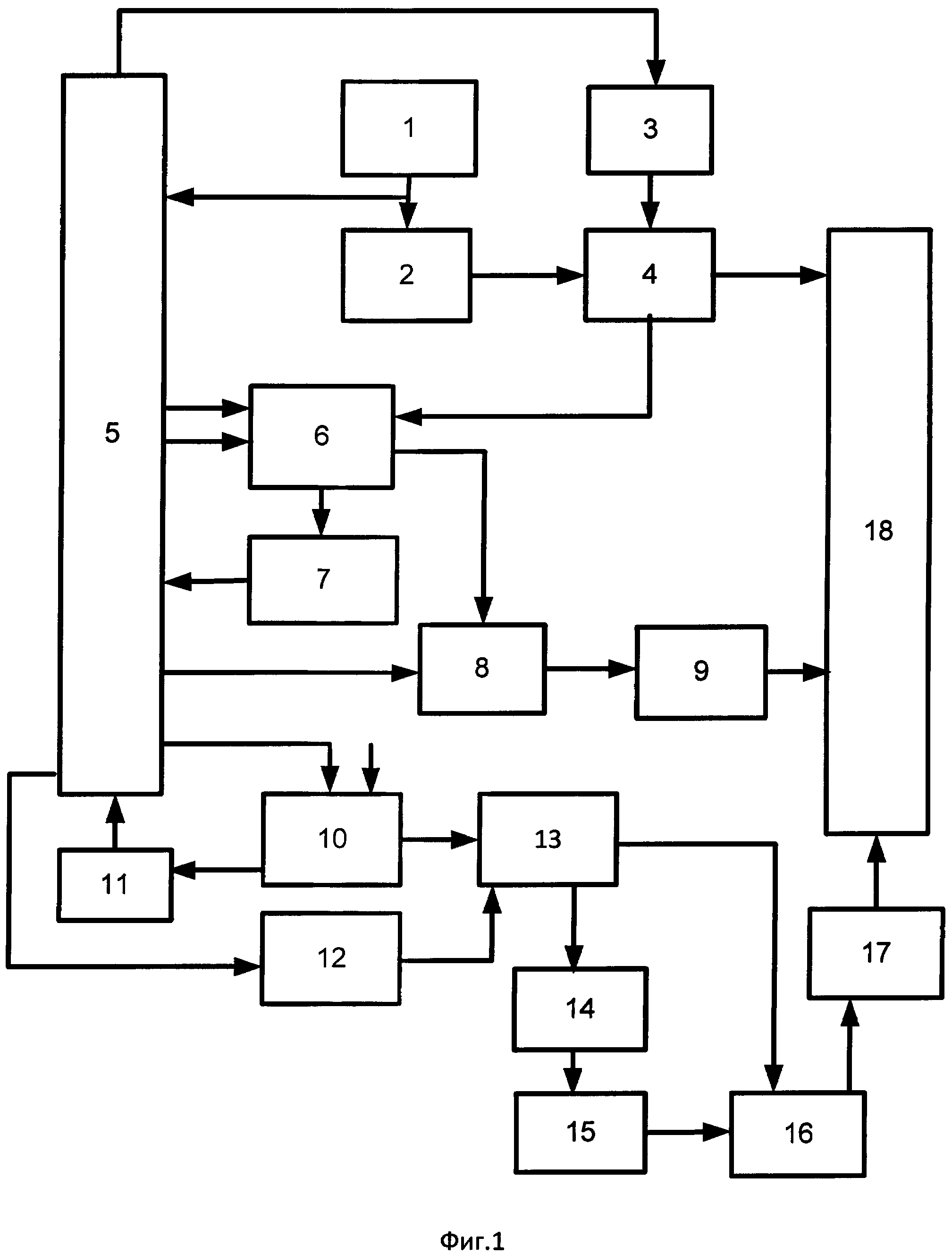
Привязная мониторинговая платформа с системой питания
Устройство для моделирования процесса перемещения подвижного объекта в условиях функционирования космической разведки с учетом возможных неисправностей
Устройство мажоритирования с заменой
Устройство для моделирования состояний отдельного объекта в условиях неопределенности
Устройство для моделирования процесса полета крылатых ракет большой дальности
Способ подачи нанодисперсного компонента топливной композиции в камеру сгорания прямоточного воздушно-реактивного двигателя
Установка для определения тяговых характеристик жидких реактивных горючих
Способ получения вероятностной оценки возможности преодоления зон поражения зенитных управляемых ракет маневрирующим беспилотным летательным аппаратом
Устройство комбинированного автономного электропитания беспилотного летательного аппарата
Многоканальный спектрально-эффективный передатчик с квадратурной амплитудно-инверсной модуляцией с когерентным частотно-кодовым разделением каналов
Устройство для моделирования каталога разведки подвижных объектов
Устройство для моделирования состояний отдельного объекта в условиях неопределенности
Устройство целераспределения группировки комплексов средств поражения с учетом ограничений по зонам их назначения
Устройство для определения оптимального размещения средств объектовой противовоздушной обороны в позиционном районе соединения подвижных грунтовых ракетных комплексов

