Результат интеллектуальной деятельности: Бесплатформенная инерциальная курсовертикаль
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной системы путем создания способа непрерывной автономной коррекции углов курса, тангажа и крена.
Традиционно углы ориентации определяются путем пересчета показаний датчиков угловой скорости (ДУС) ωx, ωy, ωz в угловые скорости  ,
,  ,
,  с последующим их интегрированием. Недостатком такой системы является накапливаемая во времени погрешность и, как следствие, ограниченное время работы. Для устранения указанного недостатка в систему необходимо вводить дополнительную информацию, характеризующую угловую ориентацию летательного аппарата (ЛА). Источниками такой информации служат датчики линейного ускорения (ДЛУ) и магнитометрические датчики. Основные погрешности данной системы возникают в результате действия постоянных или медленно меняющихся ускорений, из-за нестабильности напряженности магнитного поля Земли и наличия девиации в измерениях магнитного курса. В настоящий момент данная проблема решается путем отключения коррекции на высокоманевренных участках полета или путем комплексирования с другими системами ориентации, а также использованием различных трудоемких способов списания девиации.
с последующим их интегрированием. Недостатком такой системы является накапливаемая во времени погрешность и, как следствие, ограниченное время работы. Для устранения указанного недостатка в систему необходимо вводить дополнительную информацию, характеризующую угловую ориентацию летательного аппарата (ЛА). Источниками такой информации служат датчики линейного ускорения (ДЛУ) и магнитометрические датчики. Основные погрешности данной системы возникают в результате действия постоянных или медленно меняющихся ускорений, из-за нестабильности напряженности магнитного поля Земли и наличия девиации в измерениях магнитного курса. В настоящий момент данная проблема решается путем отключения коррекции на высокоманевренных участках полета или путем комплексирования с другими системами ориентации, а также использованием различных трудоемких способов списания девиации.
Проблема коррекции бесплатформенных инерциальных навигационных систем (БИНС) по курсу заключается в том, что из-за замены съемного оборудования и смены груза возникает необходимость списания девиации перед каждым вылетом. А коррекция углов крена и тангажа затруднена тем, что при маневрировании ЛА моменты времени, когда статические оценки крена и тангажа обладают достаточной точностью, могут возникать недопустимо редко. В связи с этим предлагается способ адаптивной коррекции углов курса, крена и тангажа, в котором коррекция выполняется непрерывно.
Известно устройство «Бесплатформенная инерциальная курсовертикаль», патент №2564379, МПК G01C 21/16, опубл. 27.09.2015 г., принятое нами за прототип.
Бесплатформенная инерциальная курсовертикаль содержит трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса, вычислительный блок, блок формирования матрицы направляющих косинусов, интегрирующий блок, фильтр Калмана и блок формирования функций измерений, соединенные между собой соответствующим образом. Устройство обеспечивает адаптивную (маятниковую) коррекцию крена и тангажа БИНС, реализуемую посредством фильтра Калмана, в котором коэффициент усиления изменяется с учетом текущих значений модулей перегрузки и угловой скорости. Курс определяется при помощи магнитометрического датчика.
Недостатком является наличие существенных погрешностей измерения магнитного курса из-за остаточной девиации и измерения углов ориентации ЛА при интенсивном маневрировании. Кроме того, при решении уравнений ориентации Пуассона необходимо решить девять дифференциальных уравнений, что требует увеличения ресурсов БЦВМ.
Целью предлагаемого изобретения является повышение точности измерения магнитного курса, осуществление непрерывной коррекции БИНС по углам магнитного курса, крена и тангажа с требуемой точностью во всем диапазоне полета, уменьшение влияния остаточной девиации на точность измерения магнитного курса и уменьшение требуемого вычислительного ресурса бортового вычислителя.
Указанная цель достигается за счет того, что в бесплатформенную инерциальную курсовертикаль, содержащую трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, трехкомпонентный магнитометрический датчик, вычислительный блок, блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, выходы трехкомпонентных блоков датчиков угловых скоростей, линейных ускорений и магнитометрического датчика подключены соответственно к первому, второму и третьему входам вычислительного блока, четвертый вход которого соединен с выходом блока формирования матрицы направляющих косинусов, и к первому, второму и третьему входам блока формирования функций измерений, четвертый вход которого соединен с первым выходом, а выход соединен с первым входом фильтра Калмана, дополнительно введены блок определения параметров напряженности магнитного поля Земли, подключенный к пятому входу вычислительного блока, блок формирования кватернионов, первый, второй и третий входы которого соединены соответственно с первым выходом вычислительного блока, с выходом трехкомпонентного блока датчиков угловых скоростей и со вторым выходом фильтра Калмана, и блок формирования матрицы погрешностей системы, первый и второй входы которого соединены соответственно с выходами трехкомпонентного блока датчиков угловых скоростей и трехкомпонентного блока датчиков линейных ускорений, а выход подключен ко второму входу фильтра Калмана, при этом выходы вычислительного блока по сигналам курса, тангажа и крена являются выходами устройства.
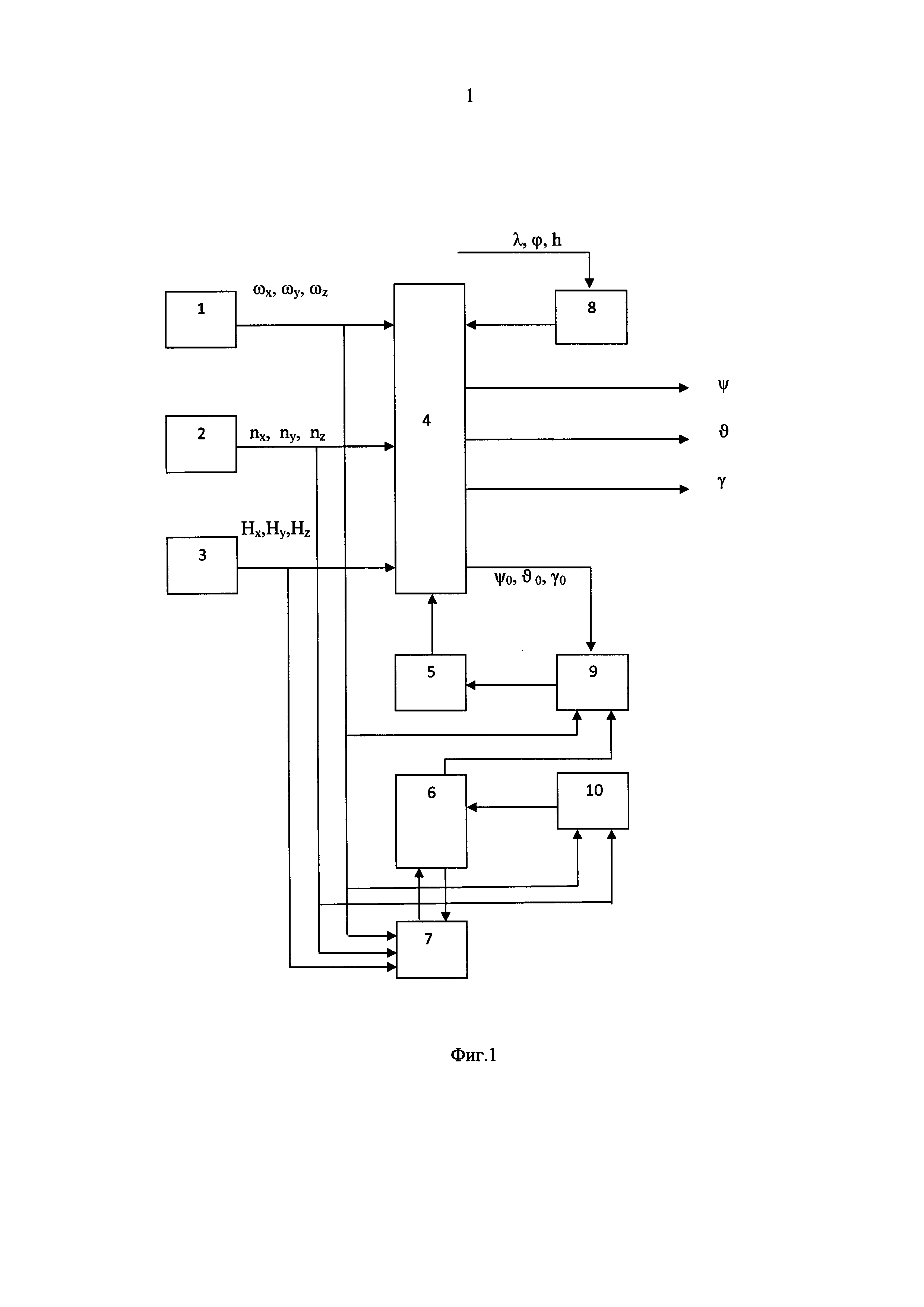
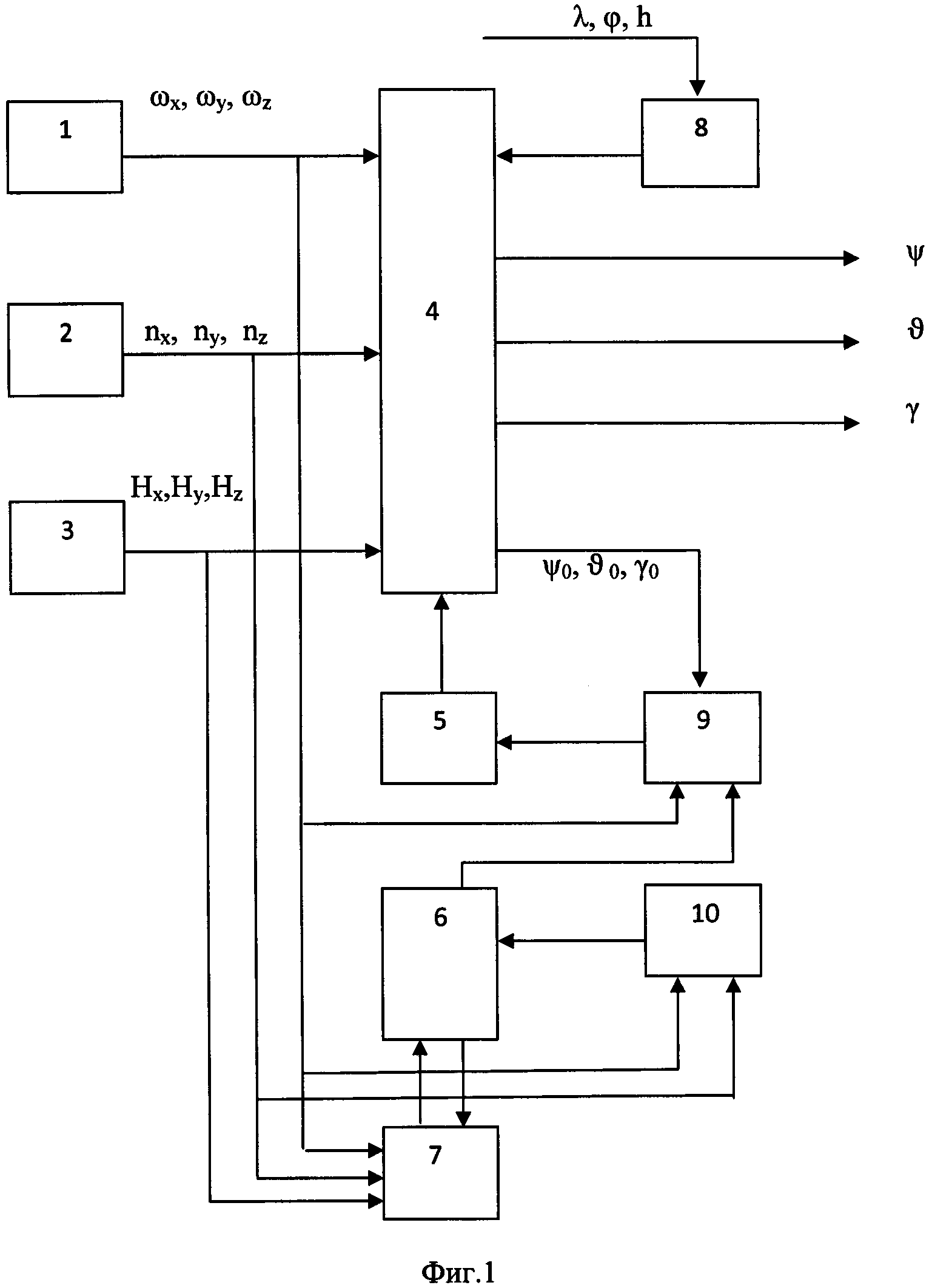
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства, а на фиг. 2 графически представлены взаимосвязи определяемых углов магнитного склонения и магнитного наклонения с параметрами магнитного поля Земли.
Бесплатформенная инерциальная курсовертикаль (фиг. 1) содержит трехкомпонентный блок 1 датчиков угловых скоростей (ДУС), трехкомпонентный блок 2 датчиков линейных ускорений (ДЛУ), трехкомпонентный магнитометрический датчик 3, вычислительный блок 4, блок 5 формирования матрицы направляющих косинусов, фильтр 6 Калмана, блок 7 формирования функций измерений, блок 8 определения параметров напряженности магнитного поля Земли, блок 9 формирования кватернионов и блок 10 формирования матрицы погрешностей системы, соединенные между собой соответствующим образом.
Суть работы устройства излагается ниже.
По измерениям датчиков ДУС 1, ДЛУ 2 и трехкомпонентного (трехосного) магнитометрического датчика (магнитометра) 3 оценивается вектор состояния:

Здесь ψ - магнитный курс,  - тангаж, γ - крен, V - модуль земной скорости, i - номер дискретного момента времени измерений датчиков.
- тангаж, γ - крен, V - модуль земной скорости, i - номер дискретного момента времени измерений датчиков.
Изменение крена, тангажа и угла рыскания описывается с помощью кватерниона ориентации в блоке 9, для которого угол рыскания принимается равным магнитному курсу.

Расчет кватерниона (2) по вектору (1), необходимый для определения его начального значения и уточнения на каждом шаге коррекции, выполняется с помощью известных соотношений:
 ,
,

q1=c1c2c3-s1s2s3, q2=c1c2c3+s1s2s3, q3=c1s2s3+s1c2c3, q1=c1s2c3-s1c2s3.
Вычисление кватерниона (2) сопровождается его нормированием.

После вычисления (4) исходный кватернион q заменяется на нормированный кватернион  . По кватерниону ориентации определяется матрица поворота А(3,3) в блоке 5 формирования матрицы направляющих косинусов.
. По кватерниону ориентации определяется матрица поворота А(3,3) в блоке 5 формирования матрицы направляющих косинусов.

Расчет тангажа, крена и угла рыскания по матрице поворота выполняется с помощью соотношений

При счислении ориентации используется кватернион угловых скоростей.

где ωx, ωy, ωz - измерения, поступающие с блока 1 датчиков угловых скоростей [1/с].
Определение текущего кватерниона ориентации выполняется с помощью одношагового алгоритма, имеющего вид:

 ,
,
где Δt - шаг дискретизации измерений по времени,  - операция произведения кватернионов.
- операция произведения кватернионов.
 ,
,

Вектор состояния адаптивного фильтра Калмана представлен в выражении (1).
Все возмущения принимаются нормальными процессами белого шума.
Уравнения (1) являются линейными относительно вектора возмущений w и могут быть записаны в векторном виде
 ,
,  . Соответствующая детерминированная модель имеет вид:
. Соответствующая детерминированная модель имеет вид:

Априорная информация о начальном состоянии принимается в виде нормального распределения вектора состояния для начального времени t0:

Здесь ψ0 - начальное значение магнитного рыскания;
Измерения вектора состояния являются дискретными с малым шагом дискретизации по времени Δt=ti-ti-1.
Вектор измерений сигналов для дискретных моментов времени ti имеет вид

Для определения магнитного курса используют трехкомпонентный магнитометрический датчик.
Рассмотрим плоскость магнитного меридиана, которая является вертикальной плоскостью, проходящей через точку текущего местоположения летательного аппарата. Она содержит в себе вектор напряженности геомагнитного поля, который обозначим
 ,
,
где d1, d2, d3 - горизонтальная, вертикальная и поперечная составляющие.
При известных значениях широты ϕ, долготы λ и радиуса Земли r проекции вектора напряженности магнитного поля Земли определяют по известным выражениям [1] итеративным методом (фиг. 2) в блоке 8 определения параметров магнитного поля Земли:
 ,
,
 ,
,
 ,
,
 ,
,
Y=Y',
 .
.
 ;
;
где ϕ' и ϕ - геоцентрическая и геодезическая географические широты местности.
Отсюда определяем искомые величины:
d1=X⋅cosD; d2=-Z; d3=Y⋅cosD.
Ориентацию аппарата определяют относительно текущей нормальной земной системы координат, повернутой в горизонте в направлении магнитного меридиана.
Тогда при произвольной ориентации аппарата трехкомпонентный магнитометр измеряет проекции вектора tn на оси чувствительности магнитометра. Далее полагаем, что оси чувствительности совпадают со строительными осями летательного аппарата.
Вектор наблюдений, обозначаемый далее Z1, содержит измерения трехосного магнитометра, а вектор наблюдений, обозначаемый далее Z2, содержит измерения акселерометров, поступающих с блока датчиков линейных ускорений.

 ,
,
 ,
,
где B(t) - матрица направляющих косинусов между связанной с ЛА системой координат и нормальной земной системой координат, повернутой на угол магнитного склонения D на горизонтальной плоскости.

Здесь νi - вектор ошибок измерений с заданной ковариационной матрицей R2.
Функции ƒx, ƒy, ƒz определяют связь измерений перегрузок с параметрами полета. Точные соотношения для этих функций имеют вид:
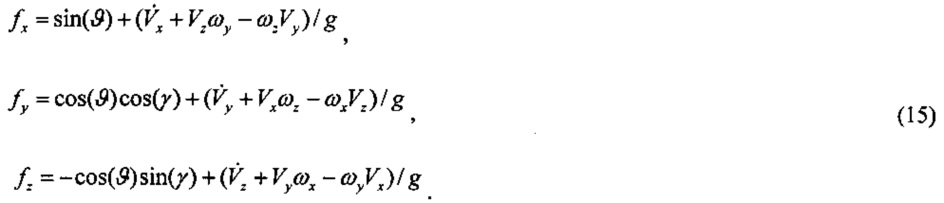
Здесь Vx, Vy, Vz - проекции вектора земной скорости на связанные оси ЛА.
Полный учет соотношений (15) при ограничении состава датчиков только акселерометрами и гироскопами не представляется возможным, поэтому принимается упрощающее допущение о малости углов атаки и скольжения, а также допущение о постоянстве модуля путевой скорости в интервале дискретизации Δt. При этом имеют место соотношения: Vx=V,  , и уравнения (15) упрощаются.
, и уравнения (15) упрощаются.

С учетом (16) матрица Якоби вектора наблюдений (13, 14) имеет вид:


Соотношения (13) являются приближенными. Степень приближения зависит от отклонения модуля перегрузки от единицы. Чем больше модуль перегрузки отличается от единицы, тем менее точны эти уравнения и тем больше дисперсии  ,
,  ,
,  . Данные дисперсии задаются в блоке 7 линейной функцией следующего вида:
. Данные дисперсии задаются в блоке 7 линейной функцией следующего вида:

где  .
.
Приближенность соотношений (15) учитывается с помощью включения в модель динамики вектора состояния (1) дополнительных возмущений, уровень которых определяется мерой отличия модуля перегрузки от единицы и модуля угловой скорости от нуля в блоке 7 формирования функций измерений.
Текущий вектор состояния (1) рассчитывается по кватерниону (2) с учетом (4), (5), (6), после чего полагается, что он известен с точностью до указанных дополнительных возмущений. При этом уравнения объекта принимаются в виде:

Здесь xiq - вектор, в котором компоненты крена, тангажа и угла рыскания рассчитаны по соотношениям (6), а компонента скорости принимается равной ее априорному значению на момент текущих измерений; wi - вектор возмущений с переменной ковариационной матрицей Qi, которая определяется в блоке 9 формирования матрицы погрешностей системы, как функция от перегрузок и угловых скоростей ЛА:

В соответствии с (10) матрица дискретной модели объекта, используемая в алгоритме фильтра Калмана для прогноза ковариационной матрицы ошибок оценивания, принимается единичной. Адаптивный алгоритм фильтра Калмана имеет следующий вид:
 .
.
 ,
,  ,
,
 ,
,
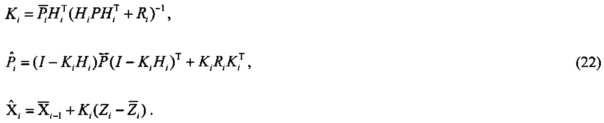
Дисперсии возмущений в ковариационной матрице (22) в блоке 9 формирования матрицы погрешностей системы задаются нелинейными функциями модуля перегрузки и модуля угловой скорости.

Суть данных функций заключается в том, что чем больше модуль перегрузки отличается от единицы и модуль угловой скорости от нуля, тем больше должны быть среднеквадратичные отклонения возмущений, действующих на модель (10). Для этого функции (24) задаются в кусочно-линейном виде, а узлы их интерполяции определяются путем настройки на обучающем множестве характерных процессов динамики ЛА. Настройка функций (24) осуществляется отдельно для каждого типа ЛА.
Для случаев, когда положение ЛА является близким к установившемуся, имеет место идеальный случай маятниковой коррекции. При этом значения крена и тангажа, определяемые по фильтру Калмана, заменяются оценками, вычисляемыми непосредственно по показаниям акселерометров в вычислительном блоке 4.

Таким образом, с помощью предлагаемого устройство решается задача определения параметров курса, крена, тангажа и модуля земной скорости 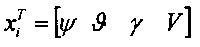 по наблюдениям (12) с учетом одношагового алгоритма ориентации (8). Получаемый при этом вектор (1) на каждом шаге пересчитывается в кватернион (2) в соответствии с соотношениями (3).
по наблюдениям (12) с учетом одношагового алгоритма ориентации (8). Получаемый при этом вектор (1) на каждом шаге пересчитывается в кватернион (2) в соответствии с соотношениями (3).
Техническим результатом использования изобретения является повышение точности и обеспечение непрерывности коррекции углов курса, тангажа и крена в условиях маневрирования ЛА в полете. Изобретение позволяет использовать магнитометрические датчики, датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа. Кроме того, в процессе определения магнитного курса списывается остаточная девиация трехкомпонентного магнитометрического датчика магнитного курса и сглаживаются ошибки измерения магнитного курса из-за аномальных магнитных полей.
Заявляемое устройство является реализуемым и может быть использовано на всех типах ЛА. В качестве датчиков угловых скоростей могут быть использованы микромеханические гироскопические датчики, при этом блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений могут быть реализованы на стандартных элементах вычислительной техники.
Литература
1. Chulliat A., S. Macmillan, P. Aiken, C. Beggan, M. Nair, B. Hamilton, A. Woods, V. Ridley, S. Maus and A. Thomson. 2015, The US/UK World Magnetic Model for 2015-2020: Technical Report, National Geophysical Data Center, NOAA. doi: 10.7289/V5TB14V7.
Бесплатформенная инерциальная курсовертикаль, содержащая трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, трехкомпонентный магнитометрический датчик, вычислительный блок, блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, выходы трехкомпонентных блоков датчиков угловых скоростей, линейных ускорений и магнитометрического датчика подключены соответственно к первому, второму и третьему входам вычислительного блока, четвертый вход которого соединен с выходом блока формирования матрицы направляющих косинусов, и к первому, второму и третьему входам блока формирования функций измерений, четвертый вход которого соединен с первым выходом, а выход соединен с первым входом фильтра Калмана, отличающаяся тем, что в нее дополнительно введены блок определения параметров напряженности магнитного поля Земли, подключенный к пятому входу вычислительного блока, блок формирования кватернионов, первый, второй и третий входы которого соединены соответственно с первым выходом вычислительного блока, с выходом трехкомпонентного блока датчиков угловых скоростей и со вторым выходом фильтра Калмана, и блок формирования матрицы погрешностей системы, первый и второй входы которого соединены соответственно с выходами трехкомпонентного блока датчиков угловых скоростей и трехкомпонентного блока датчиков линейных ускорений, а выход подключен ко второму входу фильтра Калмана, при этом выходы вычислительного блока по сигналам курса, тангажа и крена являются выходами устройства.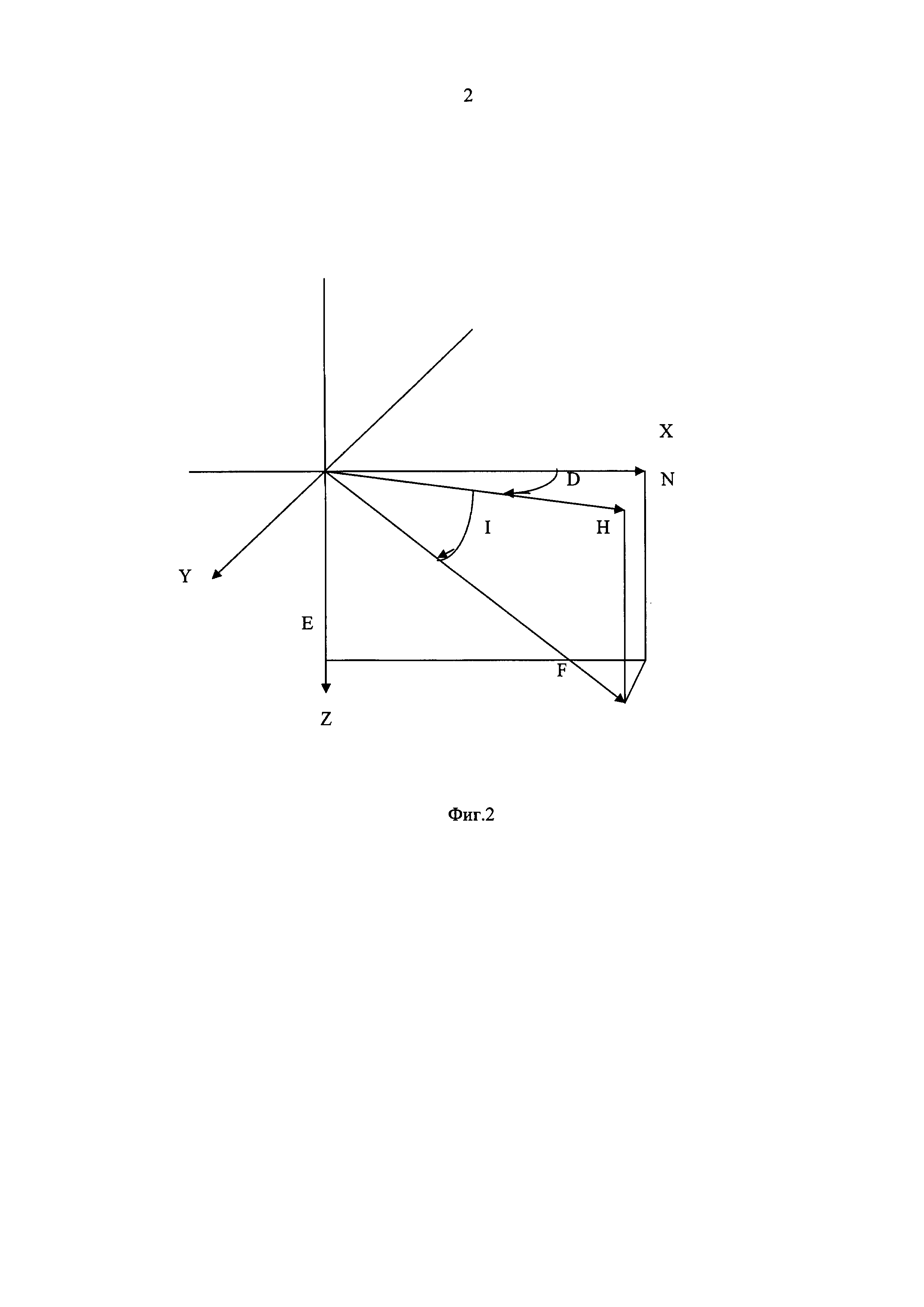
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления

