СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА В КОЛЛИНЕАРНЫЕ ТОЧКИ ЛИБРАЦИИ СИСТЕМЫ СОЛНЦЕ - ЗЕМЛЯ
Вид РИД
Изобретение
Предлагаемый способ относится к области ракетно-космической техники и предназначен для обеспечения управления космическим аппаратом (КА) на участке перелета в коллинеарные точки либрации L1 или L2 системы Солнце - Земля. Особенностью траекторий в окрестности этих либрационных точек является их неустойчивость, что приводит к необходимости периодического проведения коррекций удержания, и, таким образом, связано с расходованием бортового запаса топлива.
Традиционные способы управления КА на участке межпланетного перелета включают в себя следующие операции [1]:
- выведение КА на низкую околоземную орбиту, полет по орбите искусственного спутника Земли (ОИСЗ), старт КА с этой орбиты с помощью разгонного блока (РБ) и переход КА на траекторию перелета. При этом РБ сообщает КА приращение скорости, соответствующее расчетной орбите:
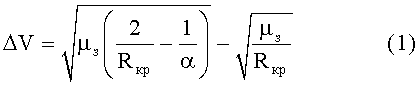
где:
µз - гравитационный параметр Земли,
Rкр - радиус круговой орбиты,
α - большая полуось орбиты перелета;
- с помощью радиосредств определяются параметры действительной орбиты, вычисляются отклонения от расчетной орбиты, на основании которых определяется необходимый (первый) корректирующий импульс, по командам с Земли КА ориентируется требуемым образом, после чего отрабатывается необходимый корректирующий импульс.
По такой схеме выполнялась коррекция ошибок выведения большинства советских и зарубежных КА, причем импульс первой коррекции достигал величины нескольких десятков м/с, что составляет 20÷40% суммарных затрат топлива на удержание КА в окрестности упомянутых либрационных точек в течение примерно одного года.
Наиболее близким к предлагаемому способу выведения является способ управления американским КА ISEE-3, выведенным на гало-орбиту в окрестности либрационной точки L1 системы Солнце - Земля в 1978 году. Этот способ выбран в качестве прототипа [2].
Указанный способ управления КА включает следующие операции:
- выведение КА на низкую круговую околоземную орбиту;
- старт с ОИСЗ с помощью РБ и выведение КА на траекторию перелета в окрестность либрационной точки, при этом РБ сообщает КА приращение скорости в соответствии с соотношением (I);
- стабилизацию продольной оси КА путем совмещения ее с направлением на опорный ориентир;
- закрутку КА относительно его продольной оси;
- измерение параметров движения центра масс КА с помощью наземных радиосредств;
- формирование по результатам измерений команд управления;
- передачу их на борт КА и выполнение коррекции траектории, исправляющей ошибки выведения.
Недостатком известного способа является то, что согласно публикациям (см. [2], [3]) при планировании затрат топлива на коррекцию перед пуском КА гравитационные потери не учитывались, т.е. коррекция, исправляющая ошибки выведения, планировалась и выполнялась по традиционной схеме, и, таким образом, вероятные топливные затраты возрастали.
Целью предлагаемого изобретения является уменьшение топливных затрат, необходимых для исправления ошибок выведения, и, как следствие этого, увеличение времени пребывания КА в окрестности либрационной точки, так как в этом случае увеличивается располагаемый запас топлива на коррекции удержания КА в окрестности либрационной точки, которые должны периодически проводится из-за неустойчивости траекторий такого типа.
Данная цель достигается путем сообщения КА при выведении на траекторию перелета значения скорости, несколько большего номинального, определяемого по формуле (1). В этом случае повышается вероятность отработки корректирующего импульса, направленного к Солнцу, который требует меньших затрат топлива, чем равный ему по абсолютной величине импульс, направленный от Солнца, вероятность которого в данном случае уменьшается.
Суть такого способа заключается в том, что, сообщая КА при старте с опорной орбиты небольшую дополнительную скорость (сверх номинального значения) и расходуя при этом топливо РБ, мы уменьшаем тем самым максимальные вероятные затраты топлива из бортового запаса КА, необходимые для исправления ошибок выведения.
Сравнительный анализ предлагаемого способа выведения и прототипа показывает, что предлагаемый способ отвечает критерию новизны, а сопоставление его с известными способами выведения показывает, что он удовлетворяет критерию существенных отличий.
Сущность заявляемого способа выведения иллюстрируется следующими рисунками:
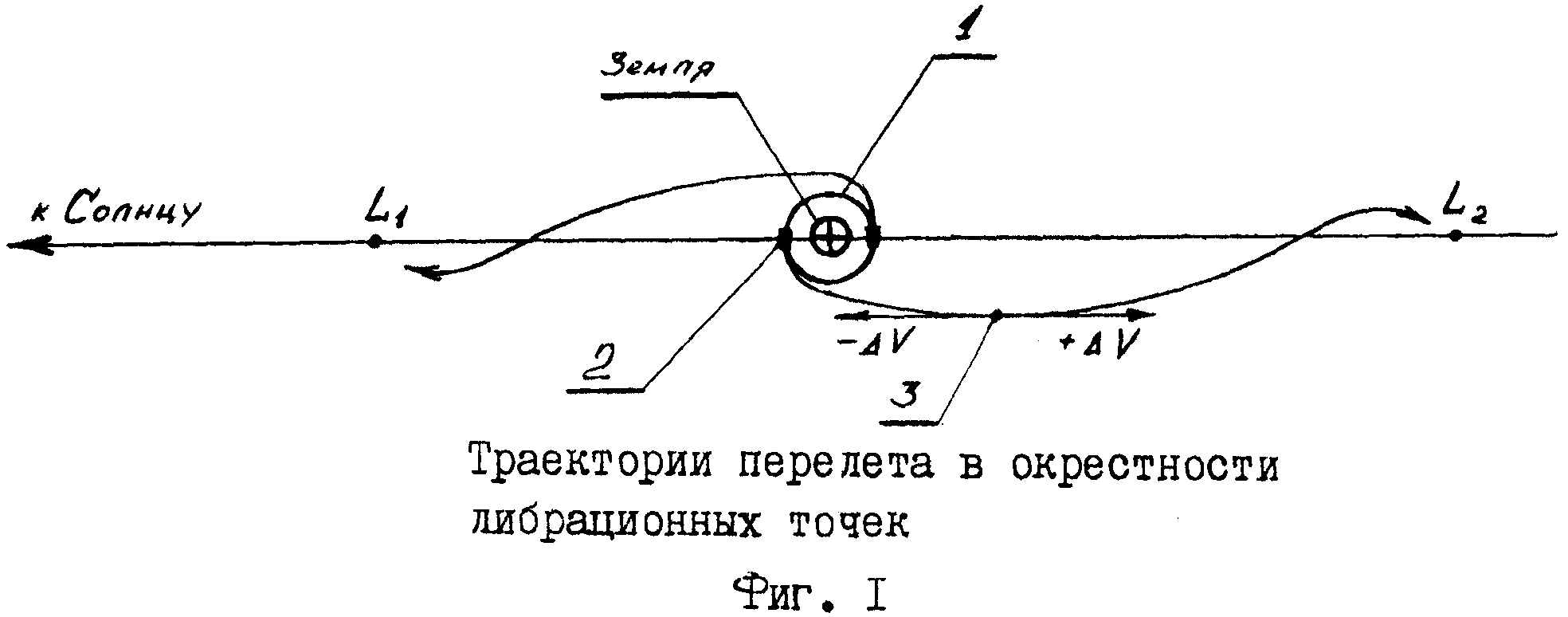
Фиг.1 - траектории перелета в окрестности либрационных точек L1 и L2 (1 - опорная орбита, 2 - старт с опорной орбиты, 3 - точка проведения первой коррекции),
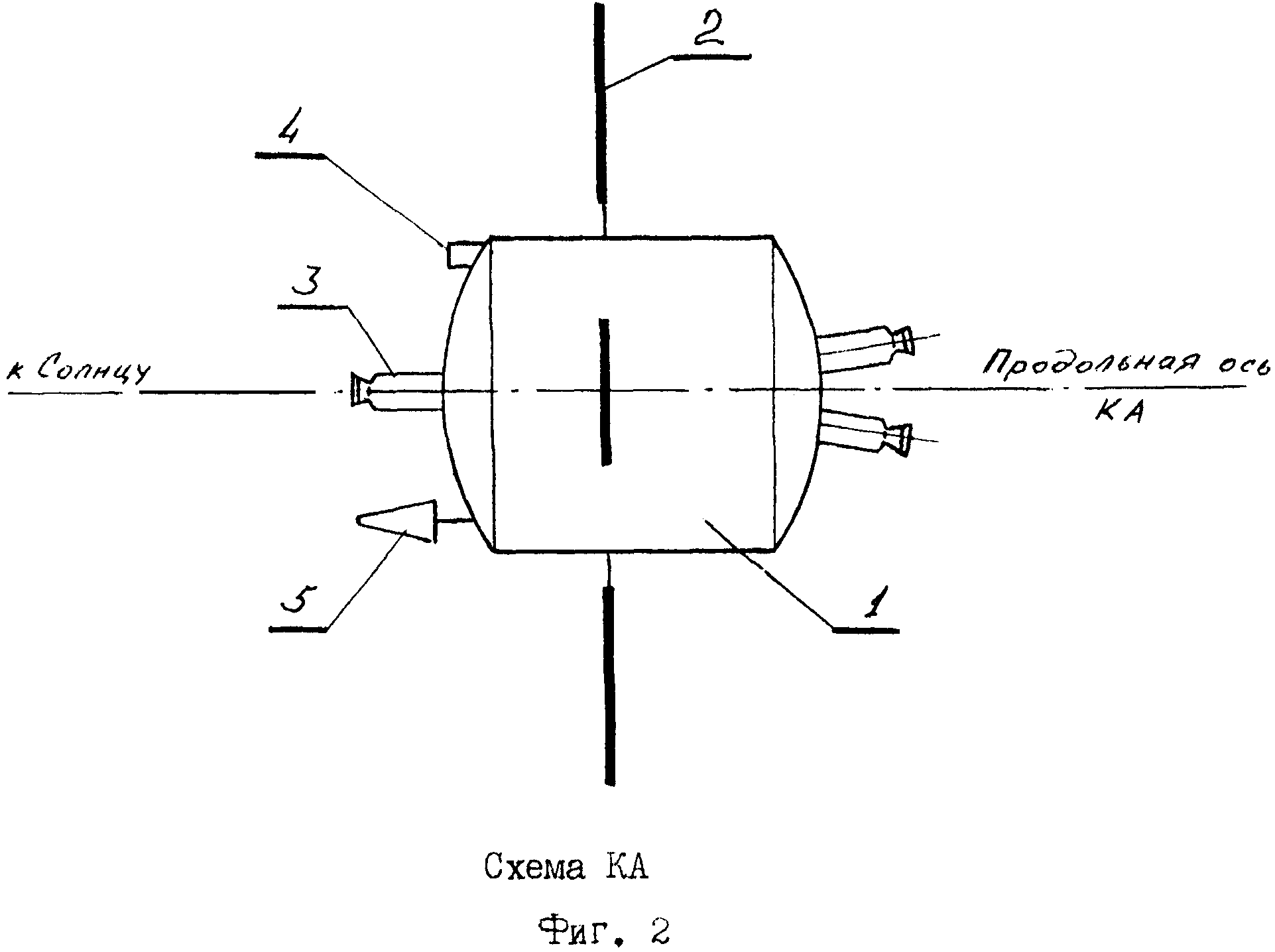
Фиг.2 - схема КА. (1 - приборный отсек, 2 - панели солнечных батарей (повернуты к Солнцу), 3 - двигатели бортовой КДУ (всего три), 4 - датчик Солнца, 5 - малонаправленная антенна).
Предлагаемый способ выведения КА на этапе перелета в точку либрации L1, (L2) системы Солнце - Земля может быть реализован следующим образом.
КА, состыкованный с РБ, выводится ракетой-носителем на низкую круговую околоземную опорную орбиту. Затем с помощью РБ КА переводится на траекторию перелета в точку либрации, при этом РБ (например, путем предварительной настройки интегратора РБ) сообщает КА импульс, несколько больший номинального, определяемого по формуле (1), а именно

где µз - гравитационный параметр Земли (км3/с2);
Vн - скорость на траектории перелета в точке первой коррекции (км/с);
Rкр - радиус начальной круговой орбиты (км);
R - расстояние от центра Земли до точки проведения первой коррекции на траектории перелета (км);
go, g* - ускорения свободного падения на поверхности Земли и в точке проведения первой коррекции (км/с2);
Руд - удельная тяга корректирующей двигательной установки космического аппарата (с);
 - расход топлива корректирующей двигательной установки (кг/с);
- расход топлива корректирующей двигательной установки (кг/с);
Мо - начальная масса аппарата на круговой околоземной орбите (кг);
 - массовый параметр коррекции (практически он составляет 15÷40 кг при начальной перегрузке ~0,004);
- массовый параметр коррекции (практически он составляет 15÷40 кг при начальной перегрузке ~0,004);
σ - дисперсия ошибки по скорости движения космического аппарата в момент проведения первой коррекции, вычисляемая по корреляционной матрице рассеяния для точки старта с начальной орбиты и точки на траектории перелета, удаленной на расстояние R от центра Земли (км/с);
k=1÷3 - безразмерный параметр.
Затем осуществляется ориентация продольной оси КА путем совмещения ее с направлением на Солнце, выполненная, например, с помощью двигателей системы ориентации, и стабилизации КА в этом положении путем закрутки.
С помощью наземных радиосредств определяются параметры движения центра масс КА, после чего по результатам измерений формируются соответствующие команды управления и отрабатывается корректирующий импульс вдоль линии Солнце-КА.
Предлагаемый способ выведения может быть реализован с помощью КА, показанного на фиг.2. КА представляет собой осесимметричную конструкцию, включающую в себя цилиндрический корпус (1), панели солнечных батарей (2), а также ряд вспомогательных систем - датчик Солнца (4), входящий в систему ориентации, и радиокомплекс с малонаправленной антенной (5). Корректирующая двигательная установка состоит из трех двигателей с тягой 3÷5 кг, установленных, как показано на фиг.2.
КА стабилизирован вокруг своей продольной оси, при этом ось вращения постоянно направлена на Солнце.
Ожидаемый эффект от экономии топлива на коррекцию ошибок выведения позволит увеличить время удержания КА в окрестности либрационной точки на 15÷20% от расчетного.
Источники информации:
1. Космонавтика. Энциклопедия. М.: Сов. Энциклопедия, 1985, с.144, 171, 413.
2. D.Muhonen and D.Folta. Accelerometer-Enhanced Trajectory Control. J. Astron. Sci, V.33, №3, 1976.
3. R.Farguhar, et al. Trajectories and Orbital Maneuvers for the First Libration Point Satellite. J. Guid. and Control, V.3, №6, 1980.
Способ выведения космического аппарата в коллинеарные точки либрации системы Солнце - Земля, включающий перевод космического аппарата с начальной круговой околоземной орбиты на траекторию перелета в окрестность точки либрации, стабилизацию аппарата путем его закрутки вокруг продольной оси, направленной на опорный ориентир, измерения параметров движения центра масс аппарата и выполнение по результатам этих измерений коррекций траектории перелета путем приложения корректирующих импульсов вдоль оси стабилизации аппарата, отличающийся тем, что, с целью уменьшения энергозатрат на выведение и увеличения тем самым срока активного существования космического аппарата в окрестности точки либрации, перевод космического аппарата на траекторию перелета осуществляют путем сообщения ему на начальной орбите разгонного импульса скорости где µ - гравитационный параметр Земли (км/с);V - скорость на траектории перелета в точке первой коррекции (км/с);R - радиус начальной круговой орбиты (км);R - расстояние от центра Земли до точки проведения первой коррекции на траектории перелета (км);g, g* - ускорения свободного падения на поверхности Земли и в точке проведения первой коррекции (км/с);Р - удельная тяга корректирующей двигательной установки космического аппарата (с); - расход топлива корректирующей двигательной установки (кг/с);М - начальная масса аппарата на круговой околоземной орбите (кг);Δm=(1,3÷3,3)% М - массовый параметр коррекции (кг);σ - дисперсия ошибки по скорости движения космического аппарата в момент проведения первой коррекции, вычисляемая по корреляционной матрице рассеяния для точки старта с начальной орбиты и точки на траектории перелета, удаленной на расстояние R от центра Земли (км/с);k=1÷3 - безразмерный параметр,а первый корректирующий импульс прикладывают вдоль направления «Солнце - космический аппарат».