Результат интеллектуальной деятельности: РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиолокации и может быть использовано для измерения дальности с высокой степенью точности.
Известен радиолокационный дальномер (устройство автосопровождения по дальности) с двумя сомкнутыми полустробами [Л1], содержащий временной дискриминатор, схему выработки опорного напряжения, интегрирующий усилитель и схему управляемой временной задержки. Недостатком известного устройства является сложность его реализации и невозможность работы вне режима автосопровождения.
Известен также дальномер [Л2], содержащий включенные последовательно оптимальный фильтр, детектор, ограничители и дифференцирующие цели. В таком устройстве формируются импульсы, жестко привязанные к пиковому значению радиолокационного сигнала. Поскольку работа устройства основана на непрерывном дифференцировании напряжения, при определении максимума оценивается не весь эхо-сигнал, а только небольшая пиковая его часть. Это приводит к ложным отсчетам дальности не только на общих (сигнальных), но и на частных экстремумах (например, на вершине и скатах эхо-сигнала - при наличии помех), т.е. к снижению точности и помехоустойчивости такого дальномера.
Из известных наиболее близким к заявленному устройству (прототипом) является дальномер [Л3], содержащий усилитель промежуточной частоты, детектор, видеоусилитель, линию задержки с отводами, сумматоры с положительным и отрицательным весом, детектор нуля и схему совпадения, к которой подключены генератор стробов дальности и пороговая схема, соединенная при помощи второй линии задержки с выходом видеоусилителя.
В таком дальномере реализуется точность измерения, близкая к потенциальной. Пороговая схема обеспечивает срабатывание дальномера, если сигнал на его входе удовлетворяет критерию обнаружения - превышает наперед заданный уровень шума.
При измерении дальности протяженных и близкорасположенных целей известный дальномер вырабатывает множество отметок между их началом и концом, поскольку из-за влияния помех вершина таких сигналов имеет множество (шумовых) максимумов. Указанные ложные срабатывания дальномера пороговой схемой не подавляются и создают больший поток излишней информации, значительно увеличивающий объем памяти и затрудняющий работу радиолокационных приемников, сопряженных с электронными вычислительными машинами (ЭВМ).
Таким образом, недостатком известного радиолокационного дальномера является наличие ложных отсчетов при измерении дальности протяженных и близкорасположенных целей.
Цель предлагаемого изобретения заключается в устранении ложных отсчетов при измерении дальности протяженных и близкорасположенных целей.
Поставленная цель достигается тем, что в радиолокационный дальномер, содержащий первую линию задержки с отводами, сумматор с положительным и отрицательным весами суммирования, детектор нуля, схему совпадения, соединенные последовательно, и вторую линию задержки, введено сравнивающее устройство, подключенное ко второму входу схемы совпадения и крайним выводам второй линии задержки, вход которой соединен с сумматором, а средний вывод - с детектором нуля.
Такое построение предлагаемого устройства обеспечивает анализ скорости нарастания входного сигнала - превышения пика над ближайшим пьедесталом. Этим достигается устранение его срабатывания от помех и получение отметок дальности только в начале и конце протяженной цели и в максимумах (в том числе близкорасположенных) эхо-сигналов.
На чертеже представлена функциональная схема предлагаемого радиолокационного дальномера.
Дальномер содержит линию задержки 1 с отводами, подключенными ко входам сумматора 2. Отводы линии задержки 1 разделены на две группы, одна из которых складывается в сумматоре 2 с положительным, а другая - с отрицательным весом. Выход сумматора 2 соединен со входом линии задержки 3, средний вывод которой подключен к детектору нуля 4, а два крайних - к сравнивающему устройству 5. Выходы детектора нуля 4 и сравнивающего устройства 5 соединены с выходами схемы совпадения 6.
Предлагаемый радиолокационный дальномер работает следующим образом.
На вход линии задержки с отводами 1 поступает видеоимпульсный эхо-сигнал. Сигналы с первой половины отводов линии I складываются в сумматоре 2 с положительным весом, а второй половины - с отрицательным весом. По мере поступления входного напряжения на линию задержки 1, суммарный сигнал от обеих групп отводов последовательно проходит через максимальное, нулевое и минимальное значения. Спустя половину времени задержки линии 3 переходом через нуль этот сигнал запускает детектор нуля 4.
На сравнивающее устройство 5 при этом поступают напряжения с крайних выводов линии задержки 3, соответствующие результатам суммирования до и после регистрируемого детектором 4 перехода через нуль.
Если анализируемый эхо-сигнал существенно (в соответствии с установленным в сравнивающем устройстве порогом) превышает окружающий его пьедестал, сравнивающее устройство 5 вырабатывает импульс, совпадающий с откликом нуля и открывающий схему совпадения 6.
На выходе дальномера при этом появляется импульсное напряжение, передний фронт которого жестко связан с прохождением эхо-сигнала через максимум.
Выходной импульс вырабатывается: в момент прохождения одиночного эхо-сигнала через максимум; в моменты окончания фронта и начала спада эхо-сигнала от протяженной цели. И не вырабатывается вследствие запирания схемы совпадения 6 сравнивающим устройством 5: если входной сигнал (помеха) с малой амплитудой не удовлетворяет критерию обнаружения; в моменты прохождения эхо-сигнала от протяженной цели через свою вершину, в том числе пораженную помехами; в промежутке между частично совпадающими сигналами.
Теоретический анализ и экспериментальная проверка подтверждают работоспособность предлагаемого устройства и достигаемый эффект: полное подавление ложных отсчетов при измерении дальности протяженных и близкорасположенных целей при точности таких измерений до 3-10% длительности одиночного эхо-сигнала. В составе радиолокационной станции, оснащенной оперативной ЭВМ, предложенное усовершенствование дальномера позволяет в 1,5-2 раза уменьшить необходимый объем ее памяти, упростить обработку поступающей информации, улучшить тактико-технические показатели обнаружения и сопровождения целей.
Источники информации
1. Теоретические основы радиолокации. Под ред. А.Д. Ширмана. Изд-во «Сов. Радио», М., 1970 г., 4.8, рис. 4.18, с.206-207.
2. Б.Н. Митяшев. Об оптимальном способе определения временного положения импульсов. «Радиотехника и электроника», 1960 г., т.5. №2, п.2, с. 210.
3. В.Г. Яроцкий, Г.А. Силантьев. Анализ ошибки измерения дальности в дальномере на линии задержки с отводами. «Радиотехника», 1975 г., т.30, №2, с. 87-88.
Радиолокационный дальномер, содержащий первую многоотводную линию задержки (Л3), соединенную с сумматором с положительным и отрицательным весом суммирования, последовательно соединенные детектор нуля и схему совпадения, а также вторую линию задержки (Л3), отличающийся тем, что, с целью устранения ложных отсчетов при измерении дальности до протяженных и близкорасположенных целей, в него дополнительно введена схема сравнения, входы которой подключены к крайний отводам второй Л3, а выход - ко второму входу схемы совпадения, при этом выход сумматора соединен со входом второй Л3, а ее средний отвод подключен ко входу детектора нуля.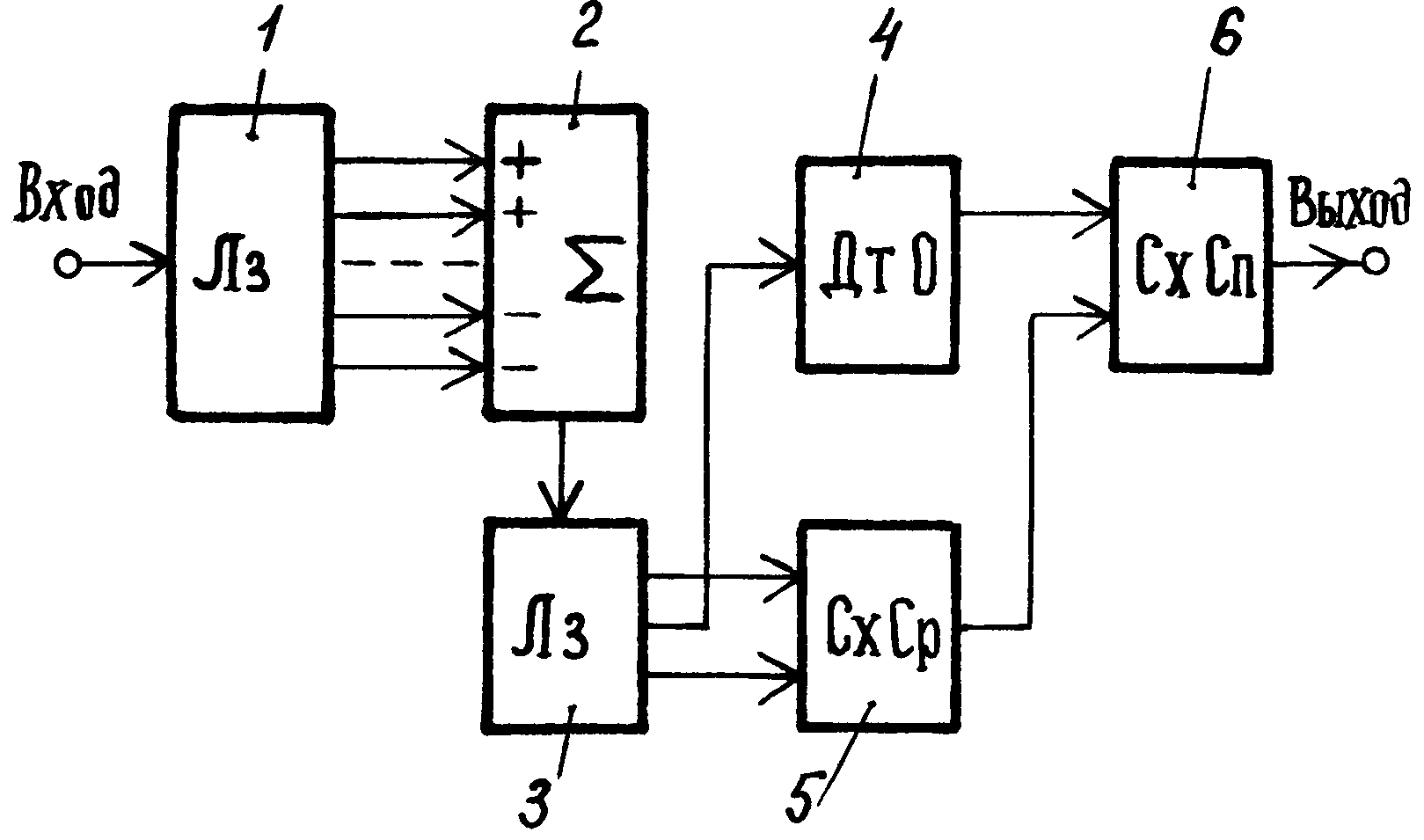
Многоканальный приемник моноимпульсной радиолокационной станции
Автоматизированный компенсатор
Многоканальный автокомпенсатор
Трехканальный радиолокатор
Устройство подавления активных помех
Накопитель радиолокационных сигналов
Автоматический компенсатор

