Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛИ В СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Настоящее изобретение относится к области военной радиоэлектронной техники и может быть применено в морских системах разведки и целеуказания (ЦУ), построенных на базе использования выносных наблюдательных пунктов (ВНП), размещаемых на летательных аппаратах (ЛА) и оборудованных комплексными навигационной и разведывательной аппаратурой.
Для увеличения дальности обнаружения целей и получения разведывательной информации в современных системах разведки, освещения надводной обстановки и ЦУ используют высоко поднятые над Землей передвижные ВНП, разведывательная аппаратура которых позволяет определять полярные координаты целей относительно ВНП.
Известны устройства освещения надводной обстановки и выдачи целеуказания, определяющие местоположение цели в прямоугольных координатах ЛА, а затем пересчитывающие их в прямоугольную систему координат приемного пункта (ПП). Указанные устройства при этом осуществляют взаимную привязку координатных систем, осуществляют совместную работу в пределах радиогоризонта нахождения цели ВНП и ПП. Особенностью известных устройств является одновременная совместная работа одного или двух ВНП с одним ПП. С целью использования полученной разведывательной информации ПП, ПП, находящимися относительно ВНП и цели на удалениях, значительно превышающих радиогоризонт, при одновременном приеме развединформации несколькими ПП от одного ВНП решение задачи местоопределения (МО) цели на ВНП осуществляют в абсолютной географической системе координат (Г.С.К.).
Известно устройство определения географических координат цели на ЛА (Научно-технический сборник "Вопросы специальной радиоэлектроники". Серия радиолокационная техника. Выпуск 12, 1967 г., стр.3. "Система координат для навигационно-прицельного комплекса"), которое включает измеритель полярных координат цели (бортовую радиолокационную станцию - РЛС), разностно-дальномерную навигационную систему, формирователь истинного пеленга и преобразователь координат. В указанном устройстве реализуется географическая и частно-ортодромическая система координат.
Местоположение (МП) цели в Г.С.К. осуществляется решением уравнений



где φц и λц;  и
и  - географические и сферические координаты цели;
- географические и сферические координаты цели;
 и
и  - сферические координаты ЛА, определяемые системой навигации;
- сферические координаты ЛА, определяемые системой навигации;
Пц и Дц - истинный пеленг и дальность до цели;
RЗ - радиус Земли.
При решении указанной задачи в полярных районах Г.С.К. наблюдается явление "широтного ограничения". Измерение же полярных координат цели прототип осуществляет активным способом. Как результат, недостатками прототипа являются:
- различное значение линейной ошибки определениями МП цели, возрастающее в полярных районах Г.С.К. при увеличении географической ширины нахождения ВНП, по сравнению с принятой наперед линейной ошибкой;
- недостаточная скрытность в определении координат цели, что связано с работой только бортовой РЛС. "Широтное ограничение" проявляется в образовании двух зон углов пеленгования целей с пониженной и повышенной точностью МО цели. Отмеченные выше недостатки понижают вероятность поражения цели, в связи с чем поставленная задача в полярных районах решается в относительных системах координат, что требует их взаимной привязки.
Целью настоящего изобретения является устранение указанных недостатков, заключающееся в повышении точности скрытного определения географических координат цели в полярных районах с обеспечением решения задачи точного ЦУ без осуществления привязки координатных систем ЛА и ПП.
Указанная цель достигается тем, что в состав известного устройства, включающего бортовую РЛС, формирователь истинного пеленга и преобразователь координат, введены станция дальней разведки и точного пеленгования излучений корабельных РЛС надводных целей, анализатор амплитуды сигнала, устройство памяти, устройство интерполяции, комплексная навигационно-пилотажная астроинерционная система, азимутальный вычислитель, устройство оптимизации режима пеленгования астроориентиров. Введение в предлагаемое изобретение перечисленных выше устройств обеспечивает предварительное МО ЛА и его курсоуказание, запоминание значения нормированных характеристик точности, анализ ожидаемой точности решения задачи МО цели, определение оптимальных азимутов астроориентиров, пеленгование их, вывод ЛА на линию радиогоризонта работы бортовой РЛС, что обеспечивает уменьшение ошибки скрытного определения МП цели по сравнению с ошибкой МО ЛА.
В этом случае пассивная станция разведки совместно с анализатором амплитуды сигнала обеспечивают скрытность работы аппаратуры ЛА до включения бортовой РЛС путем загоризонтного приема излучений и определения направления на излучающую РЛС надводной цели.
Комплексная навигационно-пилотажная астроинерционная система совместно с азимутальным вычислителем, устройствами оптимизации режима пеленгования астроориентиров, памяти и интерполяции обеспечивают оптимизацию соотношения ошибок определения линии положения ЛА.
Результаты проведенных в процессе проработки экспериментальных исследований характеристик загоризонтного приема излучений РЛС на трассах "море-воздух" при различных высотах полета ЛА подтвердили возможность ведения пассивной разведки излучений корабельных РЛС вероятного противника на дальностях, превышающих радиогоризонт на 50÷100 км и более.
Проведение математического моделирования задачи определения МП цели в системе координат ЛА в полярных районах, анализ точностных характеристик показали возможность реализации предлагаемого устройства на ЛА, оборудованного аппаратурой разведки и навигации.
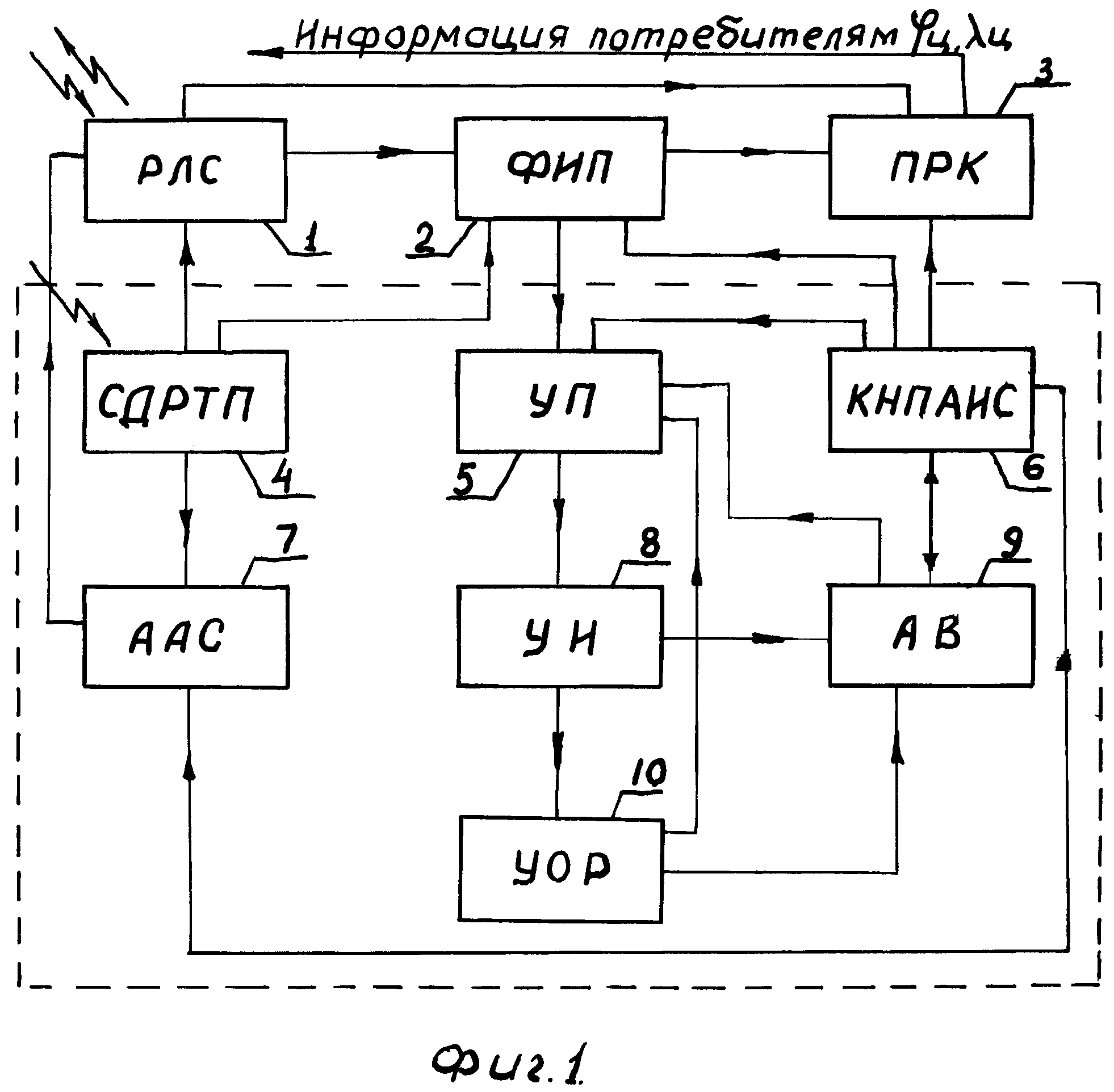
Функциональная схема предлагаемого устройства определения МП цели в системе координат ЛА представлена на фиг.1. Как видно из фиг.1, в состав устройства входят:
- радиолокационная станция 1 (РЛС);
- формирователь истинного пеленга 2 (ФИП);
- преобразователь координат 3 (ПРК);
- станция дальней разведки и точного пеленгования 4 (СДРТП);
- устройство памяти 5 (УП);
- комплексная навигационно-пилотажная астроинерциальная система 6 (КНПАИС);
- анализатор амплитуды сигнала 7 (ААС);
- устройство интерполяции 8 (УИ);
- азимутальный вычислитель 9 (АВ);
- устройство оптимизации режима пеленгования астроориентиров 10 (УОР).
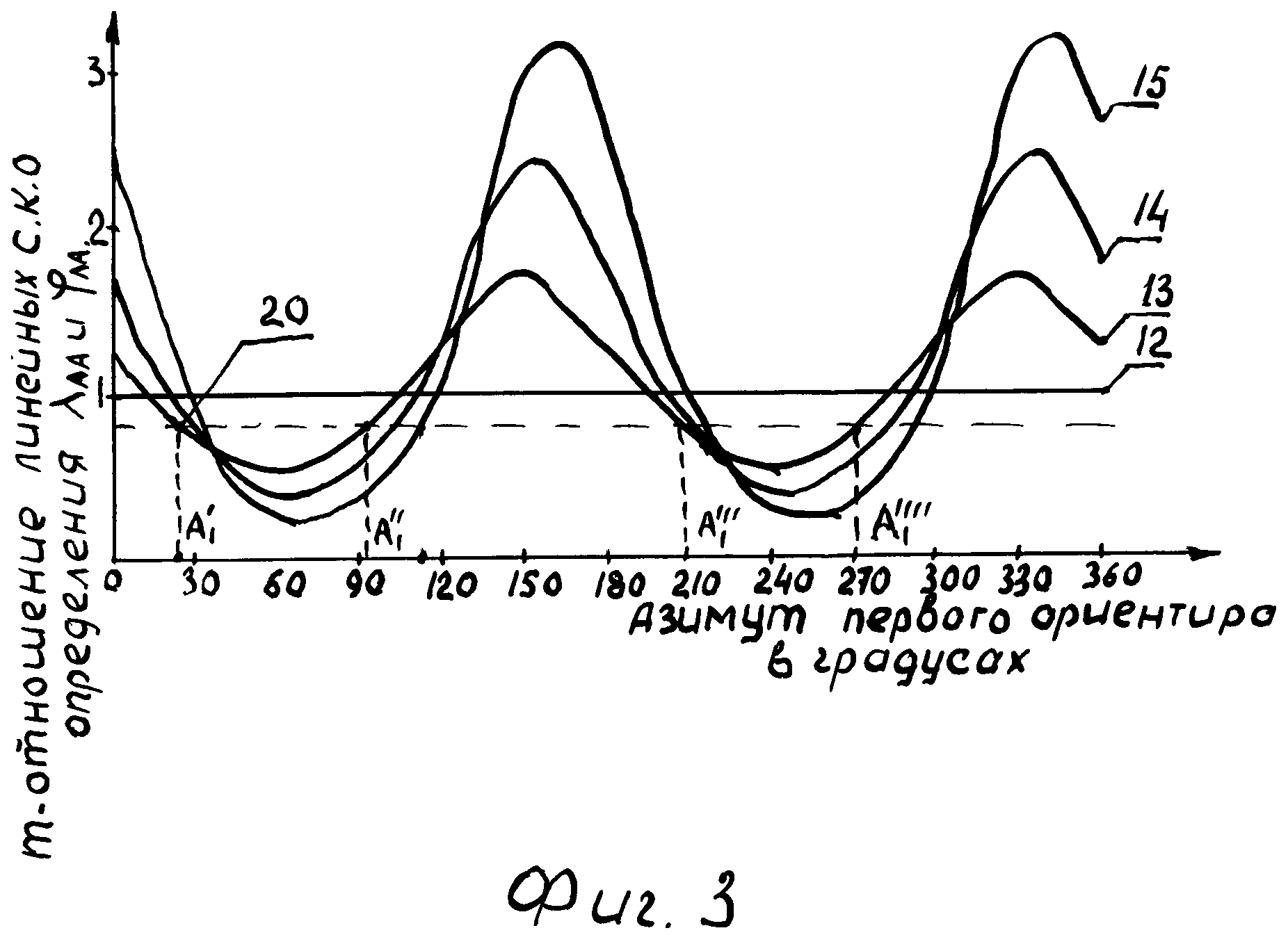
На фиг.2 представлены графики 11 нормированных характеристик точности, представляющие зависимость отношения к (к - ось ординат) радиальной (линейной) среднеквадратической ошибки (С.К.О.) определения МП цели (σrц) к радиальной СКО определения МП ЛА (σrла) в зависимости от значения истинного пеленга Пист. (Пист. - ось абсцисс, одно деление равно 30°), соотношения m  линейных С.К.О. определения линий положения ЛА при значении φла=82°, построенных по результатам моделирования задачи МО цели в системе координат ЛА при значении m=0,134; 0,387; 0,5; 0,75; 1,12, 1,59; 2,0; 3,63; 7,45.
линейных С.К.О. определения линий положения ЛА при значении φла=82°, построенных по результатам моделирования задачи МО цели в системе координат ЛА при значении m=0,134; 0,387; 0,5; 0,75; 1,12, 1,59; 2,0; 3,63; 7,45.
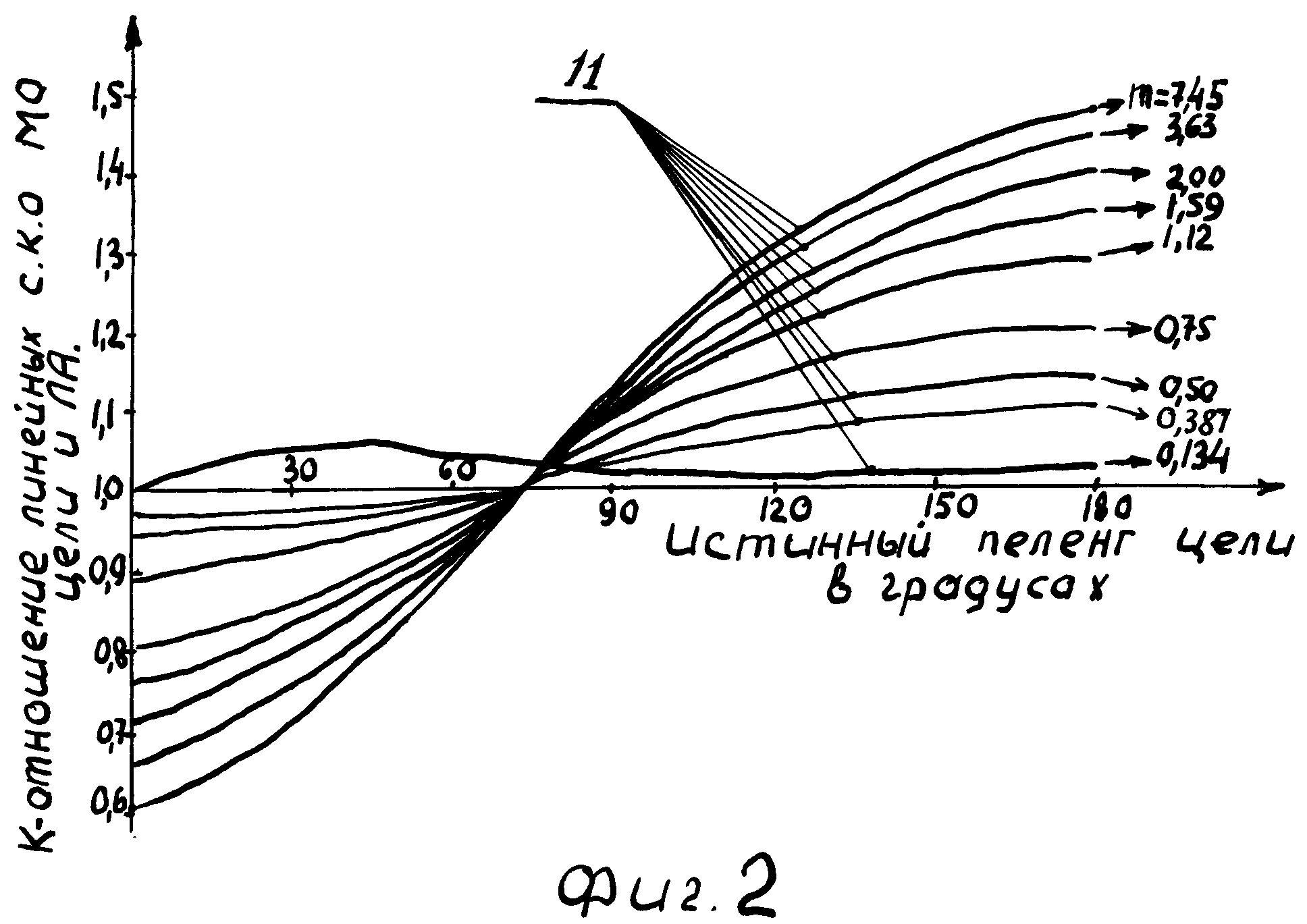
На фиг.3 представлены графики зависимости m=f(A1) - соотношения m (ось ординат) в функции от азимута первого астроориентира (ось абсцисс) при разности азимутов (ΔA) двух ориентиров: 12-ΔA=90°; 13-ΔA=60°; 14-ΔA=45°; 15-ΔA=30°.
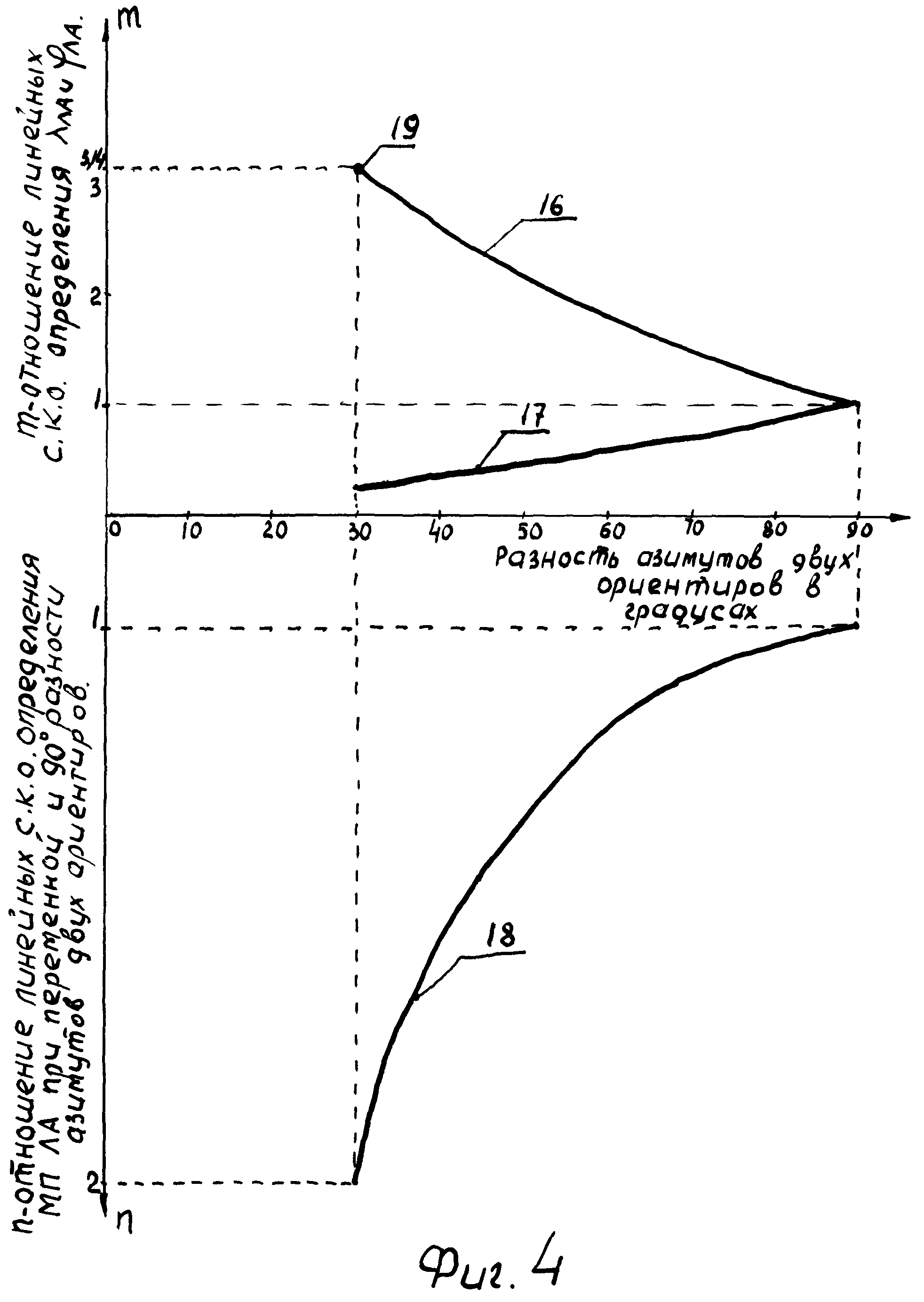
На фиг.4 представлены графики зависимости граничных значений соотношения m (m - ось ординат) в функции от разности азимутов ΔA астроориентиров (ΔA - ось абсцисс, одно деление равно 15°) - первый квадрант. Указанные графики определены для астронавигацинной системы, использующей астроориентаторы горизонтальной системы координат. При этом кривая 16 соответствует максимальным значениям m, а кривая 17 - минимальным значениям. На этом же рисунке (четвертый квадрант) представлен график 18 зависимости соотношения n (n - ось ординат) радиальных С.К.О. МО ЛА при выбранной разности азимутов астроориентиров и ΔA=90° в функции от ΔA.
Устройство 1 является измерителем полярных координат надводной цели активным способом в выбранном секторе углов пеленгования и представляет собой РЛС обнаружения надводных целей и определения их координат. Входы устройства 1 подключены к выходам устройств 4 и 7, а его выходы - ко входам устройств 2 и 3.
Устройство 2 является построителем угла по значению истинного курса ЛА (νла) и курсового угла цели (КУ) и представляет собой сумматор двух углов.
Входы устройства 2 подключена к выходам устройств 1, 4, 6, а его выходы - ко входам устройств 3, 5.
Устройство 3 является вычислителем местоположения цели в системе координат ЛА, реализующим уравнения (а), (в), (г). Входы устройства 3 подключены к выходам устройств 1, 2, 6, а его выход - к потребителям информации непосредственно или через линию связи.
Устройство 4 является измерителем КУ излучений РЛС надводной цели пассивным способам и представляет собой пассивную станцию дальнего загоризонтного обнаружения излучений корабельных РЛС и точного их пеленгования. Устройство 4 включает схемы приема излучений, определения точных значений КУ излучающих РЛС, например, фазовым способом, а также схемы определения параметров каждого принятого излучения - несущей частоты (fн), длительности импульса (τи), девиации частоты в каждом принимаемом импульсе (Δf) и преобразование как указанных параметров, так и амплитуды сигнала, в двоичный код.
Выходы устройства 4 подключены ко входам устройств 1, 2 и 7.
Устройство 5 является устройством запоминания нормированных характеристик точности, аналогичных фиг.2, для различных значений широты ЛА с шагом, например, 2°, начиная со значения широты ЛА равной 66°, при значениях соотношения m, равных, например, 0,134, 0,387; 0,5; 0,75; 1,12; 1,59; 2,0; 3,69; 7,45 или им близким. Указанные графики заложены в памяти в виде набора констант, соответствующих значениям пеленгов от 0° до 360° с шагом, например, 3°. Аналогичным образом устройство 5 запоминает значения графиков фиг.4. Устройство 5 включает схему запоминания и схему управления выборкой. Фактически устройство 5 представляет собой кубическую матрицу с координатами k, n, m, выборку констант из которой осуществляет схема управления устройством 5 в зависимости от значения широта ЛА. Входы устройства 5 подключены к выходам устройств 2, 6, 9, 10, а его выход ко входу устройств 8.
Устройство 6 является навигационно-пилотажной системой определения собственного местоположения и точного истинного курсоуказания ЛА и представляет собой комплекс устройств астрогироинерциальной навигации. Устройство обеспечивает выбор и автослежения за выбранными астроориентирами, что обеспечивает непрерывную индикацию долготы и широты ЛА. При этом предусмотрен автоматический выбор звезды.
Астронавигационный канал, построенный, например, на базе использования астроориентаторов горизонтальной системы координат, осуществляет непрерывный и точный контроль гироинерционного канала при нормальной работе, а также перераспределение ошибок определения широты и долготы ЛА в зависимости от азимутов астроориентиров. Гироинерционный канал осуществляет непрерывную навигацию и ориентацию во время перерывов в работе астронавигационного канала. Вход устройства 6 подключен к выходам устройств 7, 9, а его выходы - ко входам устройств 2, 3, 5, 7, 9.
Устройство 7 является устройством анализа амплитуды, радиотехнических параметров (fн, τи, Δf, Tповт.) и КУ сигналов, поступающих из устройства 4, на соответствие таковым, поступившим ранее, по допусковому принципу и включает в себя схему запоминания, схемы определения периода излучений и обзора, схему усреднения КУ, а также схему формирования признаков: "загоризонтный прием", "работа на линии радиогоризонта". При этом устройство реализует критерий:
- увеличение уровня сигнала при прохождении ЛА пути в направлении на цель составляет, примерно,  - при загоризонтном приеме;
- при загоризонтном приеме;  - на горизонте;
- на горизонте;
- при нахождении ЛА за линией радиогоризонта обнаружение излучающей РЛС надводной цели осуществляется по основному лепестку, а при выходе на горизонт - по основному и боковым лепесткам.
Входы устройства 7 подключены к выходам устройств 4 и 6, а его выходы - к входам устройств 1, 6.
Устройство 8 является интерполятором определения фактического значения отношения К в зависимости от Пц, φла, m по промежуточным значениям констант К, прошитых в памяти устройства 5 для фиксированных значений Пц, m, φла, и представляет собой специализированный вычислитель.
Вход устройства 8 подключен к выходу устройства 5, а его выходы - ко входам устройств 9 и 10.
Устройство 9 является вычислителем соотношения m, азимутов ориентиров в зависимости от способа навигации устройства 6. В случае, например, если реализуется алгоритм МО ЛА по измерениям высот двух ориентиров, устройство 9 реализует зависимость

где A1 и A2 - азимут астроориентиров.
Входы устройства 9 подключены к выходам устройств 6, 8, 10, а его выходы - ко входам устройств 5 и 6.
Устройство 10 является анализатором точности МО цели в зависимости от значений φла, Пц, m. В случае, например, реализации устройством 6 метода навигации с измерением высот двух ориентиров, устройство 10 осуществляет поиск минимального значения произведения k×n=min. Вход устройства 10 подключен к выходу устройства 8, a его выходы к входам устройств 5, 9. Все перечисленные устройства могут быть выполнены на типовых узлах с использованием элементов дискретного счета: логических схем "И", "ИЛИ", "НЕ". Макеты и узлы отдельных устройств, в частности, выполнены с применением больших интегральных схем типа ВАРДУВА.
Работа предлагаемого устройства осуществляется следующим образом.
Перед вылетом ЛА на выполнение задания устройство 5 запоминает графики нормированных характеристик точности с шагом, например, отмеченным в описании устройства 5, а также графики m=f(ΔA), n=f(ΔA).
При полете ЛА по заданному маршруту устройство 6 определяет φла, λла, νла измерением высот двух ориентиров, находящихся на произвольных азимутах.
При выходе ЛА в район нахождения целей устройство 1 осуществляет поиск, обнаружение и определение координат целей - дальности Dц и курсового угла КУц. Значение КУц поступает в устройство 2, куда с устройства 6 поступает значение курса νла. Устройство 2 формирует по указанной информации Пц и выдает его значение в устройство 3. Кроме этого устройство 1 выдает в устройство 3 значение Dц, а устройство 6 φла и λла. По указанной информации устройство 3 реализует зависимости (а), (в), (г), выдавая потребителям информацию о положении цели (φц и λц) в системе координат ЛА. Так решается задача, присущая прототипу. Предлагаемое же устройство обеспечивает решение задачи следующим образом.
При полете ЛА в полярных районах Г.С.К. устройство 6 вырабатывает φла, λла и νла по ориентирам, находящимся на произвольных азимутах, а также признак работы всего предлагаемого устройства. Параллельно с работой устройства 6 устройство 4 при полете в районе нахождения надводных целей обнаруживает излучения корабельных РЛС, принимает их, определяет КУц, радиотехнические параметры, преобразовывает как указанные параметры, так и амплитуду сигнала в двоичный код, а также признак "загоризонтный прием".
Значение КУц затем поступает в устройство 2, а коды радиотехнических параметров и КУц - в устройство 7.
Текущее значение νла поступает также в устройство 2, которое формирует Пц с использованием информации пассивных средств и выдает его в устройство 5. Устройство 6, осуществляя определение собственного МП, выдает при этом в устройство 5 значение φла, в устройство 9 - значения азимутов ориентиров A1 и A2. Устройство 9 реализует зависимость (д) и выдает значения m в устройство 5. Таким образом, в схему управления устройства 5 поступает Пц, φла, m и ΔA, соответствующие положению ориентиров на произвольных азимутах.
Схема управления устройства 5 по указанной информации выбирает значения коэффициента К из схемы памяти, соответствующие значения  и
и  ;
;  и
и  ;
;  и
и  .
.
(где 1 - значения больше прошиваемого в памяти;
2 - значения меньше прошиваемого в памяти).
Затем значения К с соответствующими признаками поступают в устройство 8, которое интерполирует указанные значения. Таким образом, определяется Кпр по произвольно выбранным ориентирам. Значение Кпр. затем поступает в устройство 10. Затем схема управления устройства 5 по значению ΔA выбирает из памяти значение n, которое посредством устройства 8 поступает в устройство 10. Устройство 10 при поступлении значений Кпр и n осуществляет их переключение (Kпр×n) и результат запоминает. Запись результата в регистр сравнения устройства 10 является командой, определяющей дальнейшую работу устройств 5, 6, 8, 9, 10.
При ее выработке устройством 10 и поступлении в схему управления устройства 5 последней формируются сигналы обращения к схеме памяти устройства 5 по выборке коэффициентов К, n, ΔA, соответствующих значениям m, прошитых в памяти, начиная с mmax для текущего значения Пц и φла (точка 19, фиг.4). Значения параметров К и n после интерполирования поступают в устройство 10, а параметров ΔA, m в устройство 9. Устройство 10 перемножает К×n по каждой выборке, сравнивает со значением Кпр×n и запоминает результат К×n, если выполняется условие
К×n<Кпр×n.
Указанная программа выполняется до определения К×n=min. Затем устройство 10 формирует и выдает в устройство 9 управляющий сигнал для записи в его регистр памяти значений ΔA и m, соответствующих К×n=min. В дальнейшем устройство 9, реализуя зависимость (д), осуществляет вычисление функции m=f(A1) при ΔA, поступившим из устройства 8 (подобно одному из графиков фиг.3). При этом устройство 9 анализирует вычисленное значение m на соответствие значению, определяемому произведением К×n=min.
При их соответствии в регистр памяти устройства 9 записывается значение азимута  (точка 20, фиг.3). При дальнейшем вычислении определяются азимуты
(точка 20, фиг.3). При дальнейшем вычислении определяются азимуты  ,
,  ,
,  . Затем устройство 9 вычисляет значение азимутов второго ориентира, реализуя зависимость
. Затем устройство 9 вычисляет значение азимутов второго ориентира, реализуя зависимость  :
:  ,
,  ,
,  ,
,  . Указанные значения азимутов затем из устройства 9 поступают в устройство 6, которое осуществляет анализ нахождения ориентиров на соответствующих азимутах
. Указанные значения азимутов затем из устройства 9 поступают в устройство 6, которое осуществляет анализ нахождения ориентиров на соответствующих азимутах  ,
,  ,
,  ,
,  и
и  ,
,  ,
,  ,
,  , их выбор и пеленгование. Затем устройство 6 определяет собственные координаты и формирует сигнал управления, который поступает в устройство 7. Устройство 7 при его поступлении и формировании признака "загоризонтный прием" формирует сигнал управления и выдает в устройство 6 значение КУ. При его поступлении устройство 6 меняет режим полета ЛА, обеспечивая значение КУ=0. Одновременно устройство 4 принимает сигналы РЛС надводной цели, информация которых поступает в устройство 7. Устройство 7 анализирует сигналы и вырабатывает признак "загоризонтный прием". При выходе ЛА на радиогоризонт работы устройства 1 устройство 7 вырабатывает признак "работа на горизонте". Указанная команда одновременно со значением КУ, вырабатываемым устройством 4, поступают в устройство 1, определяя сектор работы активного измерителя и начало работы. В дальнейшем работа устройств 1, 2, 3, 6 соответствует работе прототипа. Выработанное таким образом местоположение цели в системе координат ЛА поступает непосредственно или посредством линии связи потребителям.
, их выбор и пеленгование. Затем устройство 6 определяет собственные координаты и формирует сигнал управления, который поступает в устройство 7. Устройство 7 при его поступлении и формировании признака "загоризонтный прием" формирует сигнал управления и выдает в устройство 6 значение КУ. При его поступлении устройство 6 меняет режим полета ЛА, обеспечивая значение КУ=0. Одновременно устройство 4 принимает сигналы РЛС надводной цели, информация которых поступает в устройство 7. Устройство 7 анализирует сигналы и вырабатывает признак "загоризонтный прием". При выходе ЛА на радиогоризонт работы устройства 1 устройство 7 вырабатывает признак "работа на горизонте". Указанная команда одновременно со значением КУ, вырабатываемым устройством 4, поступают в устройство 1, определяя сектор работы активного измерителя и начало работы. В дальнейшем работа устройств 1, 2, 3, 6 соответствует работе прототипа. Выработанное таким образом местоположение цели в системе координат ЛА поступает непосредственно или посредством линии связи потребителям.
Использование предлагаемого устройства определения географических координат надводной цели на ЛА в полярных районах обеспечивает по сравнению с известным устройством преимущества:
- повышает скрытность определения МП цели, поскольку активный измеритель полярных координат включается в узком секторе обзора при ограниченном времени излучения;
- повышает точность определения МП цели, достигаемую за счет оптимизации положения эллипса ошибок определения собственного местоположения. При этом повышение точности может быть достигнуто около 1,5 раза в зависимости от способа навигации. При способе местоопределения, указанном в тексте, повышение составляет 25%.
Устройство для определения местоположения цели в системе координат летательного аппарата, содержащее последовательно соединенные радиолокатор, формирователь истинного пеленга и преобразователь координат, при этом второй выход радиолокатора соединен с вторым входом преобразователя координат, отличающееся тем, что, с целью повышения точности скрытного определения местоположения цели введены последовательно соединенные станция дальней разведки и точного пеленгования, анализатор амплитуды, комплексная навигационно-пилотажная астроинерционная система, азимутальный вычислитель, блок памяти, блок интерполяции и блок оптимизации режима пеленгования астроориентиров, при этом первый выход станции дальней разведки и точного пеленгования соединен с вторым входом формирователя истинного пеленга, второй выход соединен с первым входом радиолокатора, второй вход которого соединен с вторым выходом анализатора амплитуды, второй вход которого соединен с вторым выходом комплексной навигационно-пилотажной астроинерциальной системы, третий выход которой соединен с преобразователем координат, четвертый выход - с третьим входом формирователя истинного пеленга, пятый выход - с вторым входом блока памяти, а второй вход - с вторым выходом азимутального вычислителя, второй вход которого соединен с вторым выходом блока интерполяции, а третий вход - с первым выходом блока оптимизации режима пеленгования астроориентиров, второй выход которого соединен с четвертым входом блока памяти, третий вход которого подключен к второму выходу формирователя истинного пеленга.