Результат интеллектуальной деятельности: ИМПУЛЬСНЫЙ РАДИОЛОКАТОР
Вид РИД
Изобретение
Изобретение относится к области радиолокации и радионавигации и может быть использовано в системах активной радиолокации.
Известны системы активной радиолокации, предназначенные для определения координат подвижных и неподвижных объектов. Аппаратура импульсного радиолокатора включает в себя антенное приемно-передающее устройство, антенный переключатель, передатчик, приемник, синхронизатор, пороговую схему, устройство измерения дальности, блок постоянных констант. Положение р/л цели (подвижной или неподвижной) по отношению к радиолокатору определяется:
тремя координатами - в пространстве,
двумя координатами - на плоскости.
Одной из координат является дальность до р/л цели.
Измерение дальности до радиолокационной цели производится измерением временного интервала между посылкой зондирующего импульса и приходом отраженного импульса.
Данной системе присущ существенный недостаток:
- ухудшение точности определения дальности до цели из-за изменения длительности переднего фронта импульса при его прохождении через среду и приемник.
Ухудшение точности определения дальности происходит вследствие того, что дальность до цели определяется по переднему фронту отраженного импульса (на каком-то определенном уровне).
Изменение длительности переднего фронта отраженного импульса (в среде, в приемнике с согласованной полосой) приводит к значительной ошибке определения дальности.
Ошибки особенно возрастают при использовании широких зондирующих импульсов без внутриимпульсной модуляции.
Целью указанного изобретения является устранение указанных недостатков; повышение точности определения дальности при изменении длительности переднего фронта импульса.
Указанная цель достигается тем, что в известном импульсном радиолокаторе, содержащем антенное приемно-передающее устройство, антенный переключатель, передатчик, приемник, синхронизатор, пороговую схему, устройство измерения дальности, блок постоянных констант, дополнительно включены вторая пороговая схема, генератор опорных импульсов, схема "И", счетчик, множительное устройство, сумматор, ответвитель мощности, устройство измерения длительности переднего фронта зондирующего импульса, устройство памяти кода переднего фронта зондирующего импульса.
Вход второй пороговой схемы соединен с входом первой пороговой схемы, выходы пороговых схем и генератор опорных импульсов подсоединены к выходам схемы "И", выход которой через счетчик подключен к множительному устройству. Выходы устройства измерения дальности, множительного устройства, блока постоянных констант, устройства памяти кода переднего фронта зондирующего импульса подключены к сумматору. Передатчик через ответвитель мощности присоединен к схеме измерения длительности переднего фронта зондирующего импульса, которая соединена с устройством памяти кода переднего фронта зондирующего импульса.
В этом случае измеряется длительность переднего фронта нормализованного по амплитуде отраженного от цели импульса, затем по длительности переднего фронта зондирующего импульса производится коррекция переднего фронта отраженного импульса и определяется истинная дальность до цели.
Длительность переднего отраженного импульса определяется в результате срабатывания двух пороговых схем.
При срабатывании первой пороговой схемы открывается схема "И" и через нее от генератора опорных импульсов на счетчик проходят кварцованные сигналы. В момент срабатывания второй пороговой схемы схема "И" закрывается. Умножив в множительном устройстве код, полученный в счетчике, на постоянную поправку, получим значение кода переднего фронта отраженного импульса.
Код длительности переднего фронта зондирующего импульса определяется следующим образом. Зондирующий импульс поступает через ответвитель мощности на схему измерения переднего фронта зондирующего импульса. Полученный код переднего фронта зондирующего импульса записывается в устройство памяти кода переднего фронта зондирующего импульса. Из кода длительности переднего фронта отраженного импульса необходимо вычесть код длительности переднего фронта зондирующего импульса. Найденную поправку, равную разности кодов передних фронтов отраженного от цели импульса и зондирующего импульса, необходимо в сумматоре вычесть из кода дальности. Кроме того, в сумматоре из скорректированного значения кода дальности вычитается код, равный величине постоянной задержки в цепях приемника и передатчика импульсного радиолокатора.
Блок-схема импульсного радиолокатора изображена на фиг.1, где обозначены:
1 - антенное приемно-передающее устройство;
2 - антенный переключатель;
3 - передатчик;
4 - приемник;
5 - ответвитель мощности;
6 - устройство измерения длительности переднего фронта зондирующего импульса;
7 - устройство памяти кода переднего фронта зондирующего импульса;
8 - устройство измерения дальности;
9 - синхронизатор;
10 - устройство измерения длительности переднего фронта отраженного импульса;
11 - блок постоянных констант;
12 - сумматор;
13, 14 - пороговая схема;
15 - генератор опорных импульсов;
16 - схема "И",
17 - счетчик;
18 - множительное устройство;
19 - выход приемника;
20 - выход передатчика;
21 - вход приемника;
22 - вход устройства измерения дальности;
23 - вход устройства измерения дальности;
24 - вход сумматора;
25 - вход сумматора;
26 - вход сумматора;
27 - вход сумматора;
28 - выход сумматора.
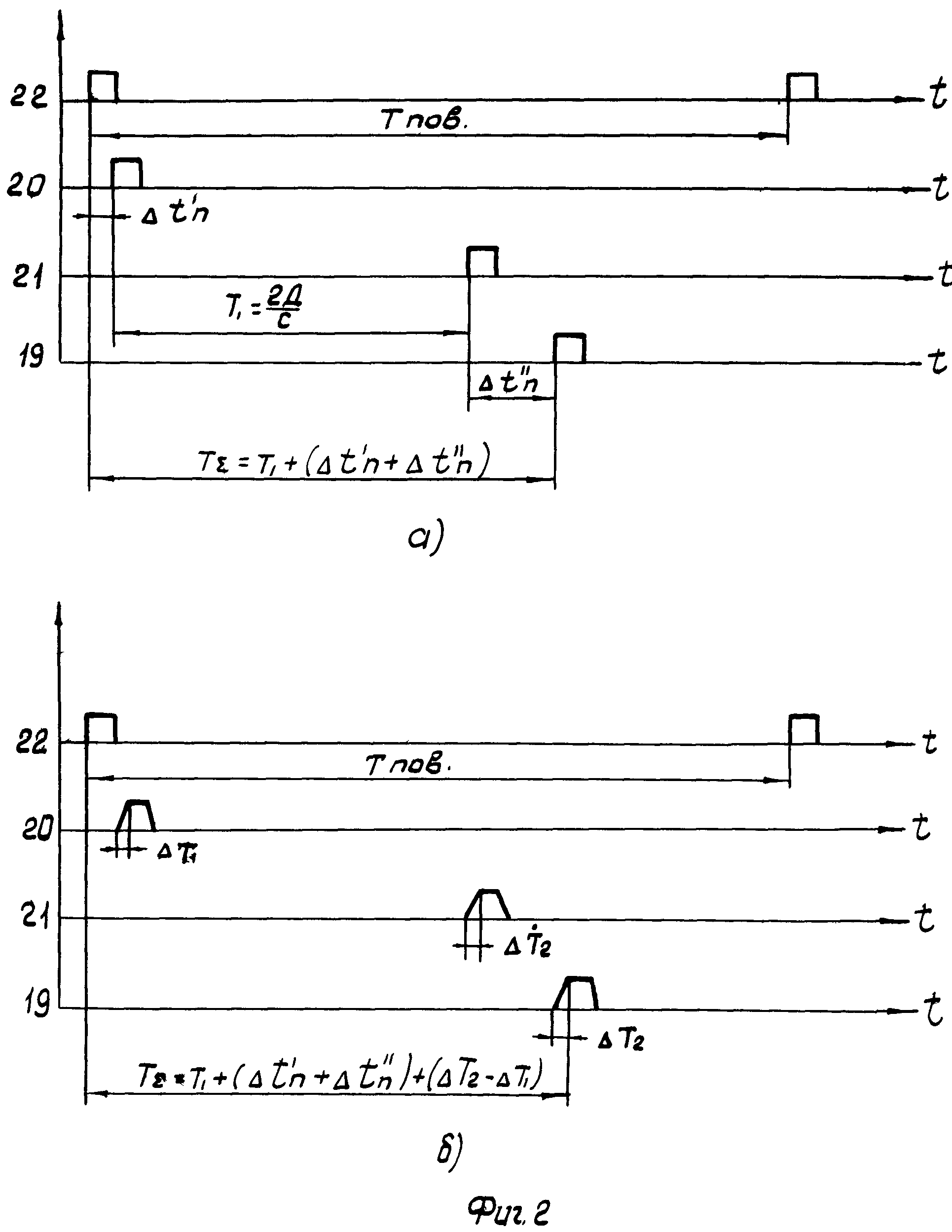
Временная диаграмма работы импульсного радиолокатора приведена на фиг.2 ((фиг. 2а) - идеальный прямоугольный импульс; фиг. 2б) - реальный прямоугольный импульс), где обозначены:
19 - отраженный импульс от цели на выходе приемника;
20 - зондирующий импульс на выходе передатчика;
21 - отраженный импульс на входе приемника;
22 - импульс запуска устройства измерения дальности;
 - время распространения электромагнитной энергии от передатчика до цели и обратно;
- время распространения электромагнитной энергии от передатчика до цели и обратно;
D - расстояние между импульсным локатором и р/л целью;
c - скорость распространения электромагнитной энергии;
 - постоянная задержка в передатчике импульсного локатора;
- постоянная задержка в передатчике импульсного локатора;
 - постоянная задержка в приемнике импульсного локатора;
- постоянная задержка в приемнике импульсного локатора;
Tпов. - период повторения импульсов передатчика;
ΔT1 - длительность переднего фронта зондирующего импульса, на выходе передатчика;
 - длительность переднего фронта отраженного импульса на входе приемника;
- длительность переднего фронта отраженного импульса на входе приемника;
ΔT2 - длительность переднего фронта отраженного импульса на выходе приемника:
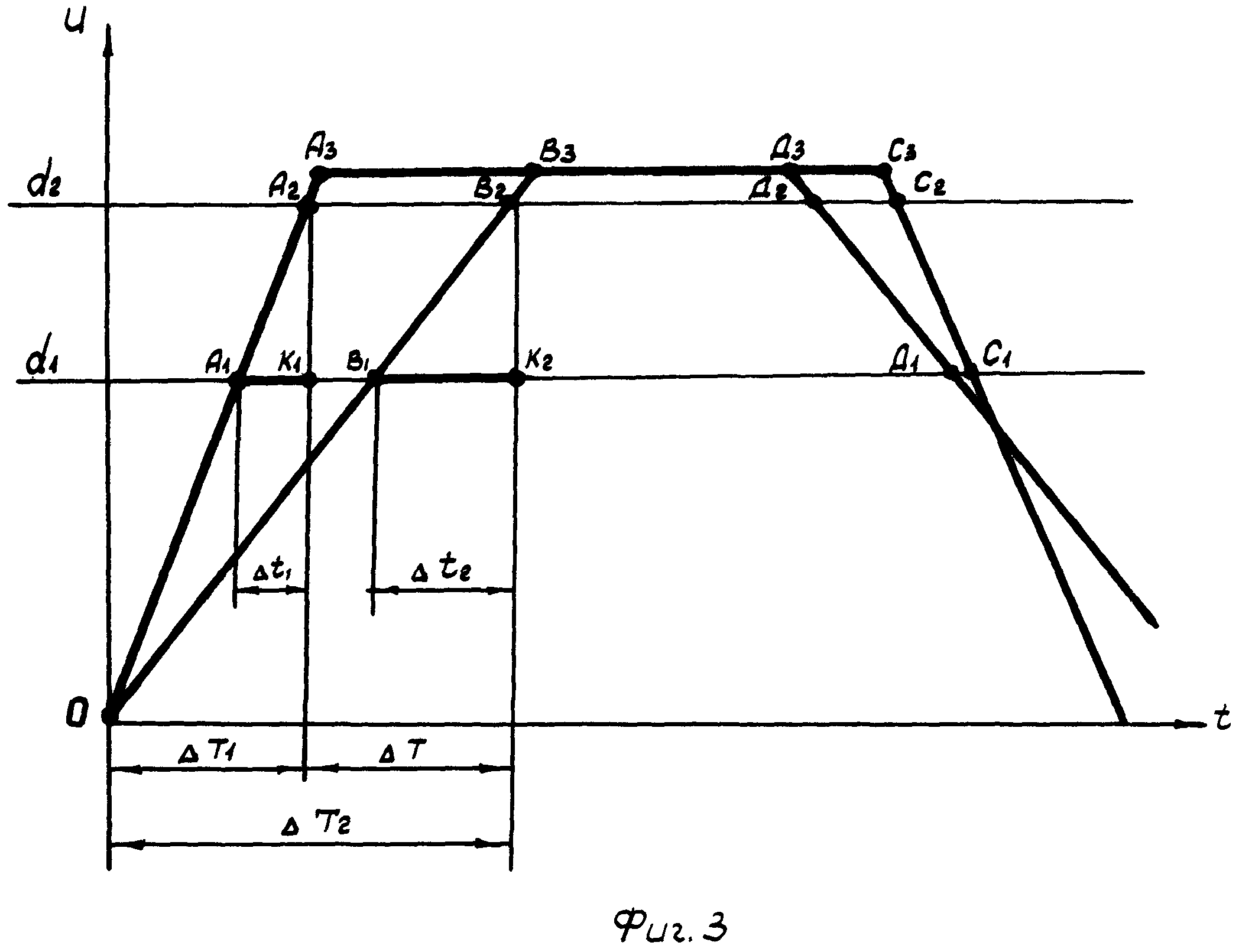
Зондирующий импульс на выходе передатчика и отраженный импульс на выходе приемника приведен на фиг.3, где обозначены:
OB3D3D1 - отраженный импульс на выходе приемника;
OA3C3C1 - зондирующий импульс на выходе передатчика;
d1, d2 - известные уровни по амплитуде;
Δt1 - длительность переднего фронта зондирующего импульса между двумя известными уровнями по амплитуде;
Δt2 - длительность переднего фронта отраженного импульса между двумя известными уровнями по амплитуде;
ΔТ1 - Длительность переднего фронта зондирующего импульса между началом отсчета и уровнем d2, по которому определяется время прихода сигнала;
ΔТ2 - длительность переднего фронта отраженного импульса между началом отсчета и уровнем d2, по которому определяется время прихода сигнала;
ΔT - задержка между отраженным импульсом на выходе приемника и зондирующим импульсом на заданном уровне d2 по амплитуде.
Предлагаемый импульсный радиолокатор состоит из антенного приемно-передающего устройства 1, антенного переключателя 2, передатчика 3, приемника 4, ответвителя мощности 5, устройства измерения длительности переднего фронта зондирующего импульса 6, устройство памяти кода переднего фронта зондирующего импульса 7, устройства измерения дальности 8, синхронизатора 9, устройства измерения переднего фронта отраженного импульса 10, блока постоянных констант 11, сумматора 12.
Устройство измерения переднего фронта отраженного импульса 10 состоит из пороговых схем 13, 14, генератора опорных импульсов 15, схемы "И" 16, счетчика 17, множительного устройства 18.
Антенное приемно-передающее устройство 1 через антенный коммутатор 2 соединено с передатчиком 3 и приемником 4.
Передатчик 3 через ответвитель мощности 5 соединен с устройством измерения длительности переднего фронта зондирующего импульса 6, выход которого соединен с устройством памяти кода переднего фронта зондирующего импульса 7.
Передатчик 3, приемник 4, устройство измерения дальности 8, соединены с синхронизатором 9.
Выход приемника 4 подключен к пороговым схемам 13, 14 устройства измерения длительности переднего фронта отраженного импульса 10. Генератор опорных импульсов 15 и выходы пороговых схем 13, 14 подключены к входам схемы "И" 16.
Выход пороговой схемы 14 подключен к устройству измерения дальности 8.
Выход схемы "И" 16 через счетчик 17 подключен к множительному устройству 18.
Выходы множительного устройства 18 устройства измерения длительности переднего фронта отраженного импульса 10, устройства памяти кода длительности переднего фронта зондирующего импульса 7, устройства измерения дальности 8, блока постоянных констант подключены к сумматору 12.
Изменение длительности переднего фронта импульса на выходе приемника корректируется поправкой ΔT, равной разности передних фронтов импульса на выходе приемника и зондирующего импульса. Для этого произведем сравнение импульсов на выходе приемника и зондирующего по фиг. 2б). Для чего совмещаем начало отсчета данных импульсов.
При этом из рассмотрения исключаются постоянные величины  и
и  .
.
По фиг.3, где изображен импульс на выходе приемника и зондирующий импульс передатчика, найдены величины, которые необходимо определить для получения поправки ΔT.
Из подобия треугольников OA2M и A1A2K (см. фиг.3) находим
Из фиг.3 определяем
A2K1=d2-d1;
A2M1=d2;
A1K1=Δt1;
OM1=ΔT1.
Подставив найденные значения в выражение (1), получим
 ;
;
Откуда
 ;
;
Из подобия треугольников OB2M2 и B1B2K2 находим
Из фиг.3 определяем
B2K2=d2-d1;
B2M2=d2;
B1K2=Δt2;
OM2=ΔT2.
Подставив найденные значения в выражение (2), получим:
 , откуда
, откуда  .
.
Задержка между импульсом на выходе приемника и зондирующим импульсом на заданном уровне d2 определяется выражением

Таким образом, для вычисления поправки ΔT необходимо знать поправочный коэффициент  , который равен константе и определяется двумя уровнями сигнала d1 и d2 и измерять интервалы времени Δt1 и Δt2. Δt1, Δt2 - интервалы времени между точками на переднем фронте зондирующего импульса и импульса на выходе приемника, когда их амплитуды достигают определенных значений (уровни d1 и d2).
, который равен константе и определяется двумя уровнями сигнала d1 и d2 и измерять интервалы времени Δt1 и Δt2. Δt1, Δt2 - интервалы времени между точками на переднем фронте зондирующего импульса и импульса на выходе приемника, когда их амплитуды достигают определенных значений (уровни d1 и d2).
Величину поправки ΔT2=ΔT2-ΔT1, равную изменению длительности переднего фронта импульса, необходимо вычесть из измеренного значения дальности, которая соответствует временному интервалу между посылкой зондирующего импульса и приходом отраженного от цели импульса.
Измерение дальности до цели импульсным локатором производится следующим образом.
Импульс запуска с синхронизатора поступает на вход передатчика 3 и вход 22 устройства измерения дальности 8.
Зондирующий импульс с выхода 20 передатчика 3 через антенный коммутатор 2 поступает на антенное приемно-передающее устройство 1 и излучается. Отраженный от цели импульс через антенное приемно-передающее устройство 1 и антенный коммутатор 2 поступает на вход 21 приемника 4.
Импульс с выхода 19 приемника 4 поступает на входы пороговых схем 13, 14 устройства определения длительности переднего фронта отраженного импульса 10. Сигнал с выхода пороговой схемы 14, соответствующий моменту прихода отраженного импульса, поступает на вход 23 устройства измерения дальности 8, которое определяет дальность путем измерения временного интервала между излучением зондирующего импульса и приходом отраженного импульса.
Код дальности с выхода устройства измерения дальности 8 поступает на вход 24 сумматора 12.
Для исключения постоянной поправки ΔD, пропорциональной постоянной задержке  , из этого значения кода вычитается поправка, формируемая блоком постоянных констант 11 и поступающая на вход 25 сумматора 12.
, из этого значения кода вычитается поправка, формируемая блоком постоянных констант 11 и поступающая на вход 25 сумматора 12.
После этого в сумматоре 12 из полученного кода вычитается поправка ΔT=ΔT2-ΔT1, вызванная изменением длительности переднего фронта отраженного импульса (при прохождении через среду и приемник).
Величина ΔT1 определяется следующим образом.
Сигнал с выхода передатчика 3 через ответвитель мощности 5 поступает на устройство измерения длительности переднего фронта зондирующего импульса 6 и измеренное значение кода заносится в устройство памяти кода длительности переднего фронта зондирующего импульса 7. Из устройства 7 значение кода ΔT1 поступает на вход 26 сумматора 12.
Величина ΔT2 поступает в сумматор 12 из устройства определения длительности переднего фронта отраженного импульса и определяется следующим образом.
При срабатывании первой пороговой схемы 13 через схему "И" 16 на вход счетчика 17 с генератора опорных импульсов 15 поступают кварцованные сигналы. При срабатывании второй пороговой схемы 14 схема "И" 16 закрывается.
Вследствие того, что на вход пороговых схем 13, 14 поступает нормализованный по амплитуде сигнал с выхода приемника, то по интервалу времени между моментами срабатывания двух пороговых схем 13, 14 определяется длительность переднего фронта импульса Δt2 между уровнями d1 и d2, измеренное значение Δt2 поступает на вход множительного устройства 18 и с его выхода значение длительности переднего фронта отраженного импульса на выходе приемника ΔT2 поступает на вход 27 сумматора 12. С выхода 28 сумматора 12 выдается истинное значение кода дальности Dист.
Интервал времени между формированием импульса запуска передатчика и приходом отраженного импульса с выхода приемника на устройство измерения дальности определяется выражением

T1 - время между излучением зондирующего импульса и приходом отраженного от цели импульса;
 - постоянная задержка в цепях передатчика;
- постоянная задержка в цепях передатчика;
 - постоянная задержка в цепях приемника;
- постоянная задержка в цепях приемника;
ΔT - задержка между импульсом на выходе приемника и зондирующим импульсом
ΔT=ΔT2-ΔT1
где ΔT1 - длительность переднего фронта зондирующего импульса;
ΔT2 - длительность переднего фронта отраженного импульса на выходе приемника.
Выражение (4) может быть преобразовано в выражение

Дальность до р/л цели определяется выражением

Истинная дальность до р/л цели определяется выражением
где  - истинное время распространения электромагнитной энергии от локатора до р/л цели и обратно;
- истинное время распространения электромагнитной энергии от локатора до р/л цели и обратно;

Подставив значение  из уравнения (8) в уравнение (7), получим
из уравнения (8) в уравнение (7), получим
т.е. дальность от импульсного локатора до р/л цели определяется только временем распространения электромагнитной энергии и не зависит от изменения длительности переднего фронта зондирующего импульса и отраженного импульса при его прохождении через среду и приемник.
Таким образом, точность измерения дальности по переднему фронту не зависит от изменения длительности переднего фронта импульса.
Введение схем определения длительности переднего фронта отраженного и зондирующего импульсов дает возможность повысить точность определения дальности до цели при изменении длительности переднего фронта импульса при прохождении через среду и приемник. Применение коррекции длительности переднего фронта импульса дает возможность повысить точность измерения временного интервала, пропорционального дальности на величину, равную изменению длительности переднего фронта импульса. В известных приемниках нестабильность полосы пропускания составляет 10-20%, что эквивалентно изменению длительности переднего фронта импульса на 10-20% при прохождении через приемник, полоса пропускания которого согласована с длительностью импульса. Данное построение импульсного радиолокатора наиболее целесообразно при использовании длинных импульсов без внутриимпульсной модуляции.
Импульсный радиолокатор, содержащий приемное и передающее устройства, пороговую схему, устройство измерения дальности, блок постоянных констант, при этом вход пороговой схемы подключен к выходу приемного устройства, а выход - ко входу устройства измерения дальности, отличающийся тем, что, с целью повышения точности определения дальности до цели, в него введены вторая пороговая схема, генератор опорных импульсов, элемент И, счетчик, множительное устройство, сумматор, устройство измерения длительности переднего фронта зондирующего импульса с памятью, при этом вход устройства измерения длительности переднего фронта зондирующего импульса с памятью подключен к выходу передающего устройства, а выход подключен к сумматору, ко входам которого подключены также блок постоянных констант, выходы множительного устройства и устройства измерения дальности, вход второй пороговой схемы соединен с выходом приемного устройства, а выход соединен с одним из входов элемента И, второй вход которого подключен к выходу первой пороговой схемы, а третий вход подключен к выходу генератора опорных импульсов, вход счетчика соединен с выходом элемента И, а выход соединен со входом множительного устройства.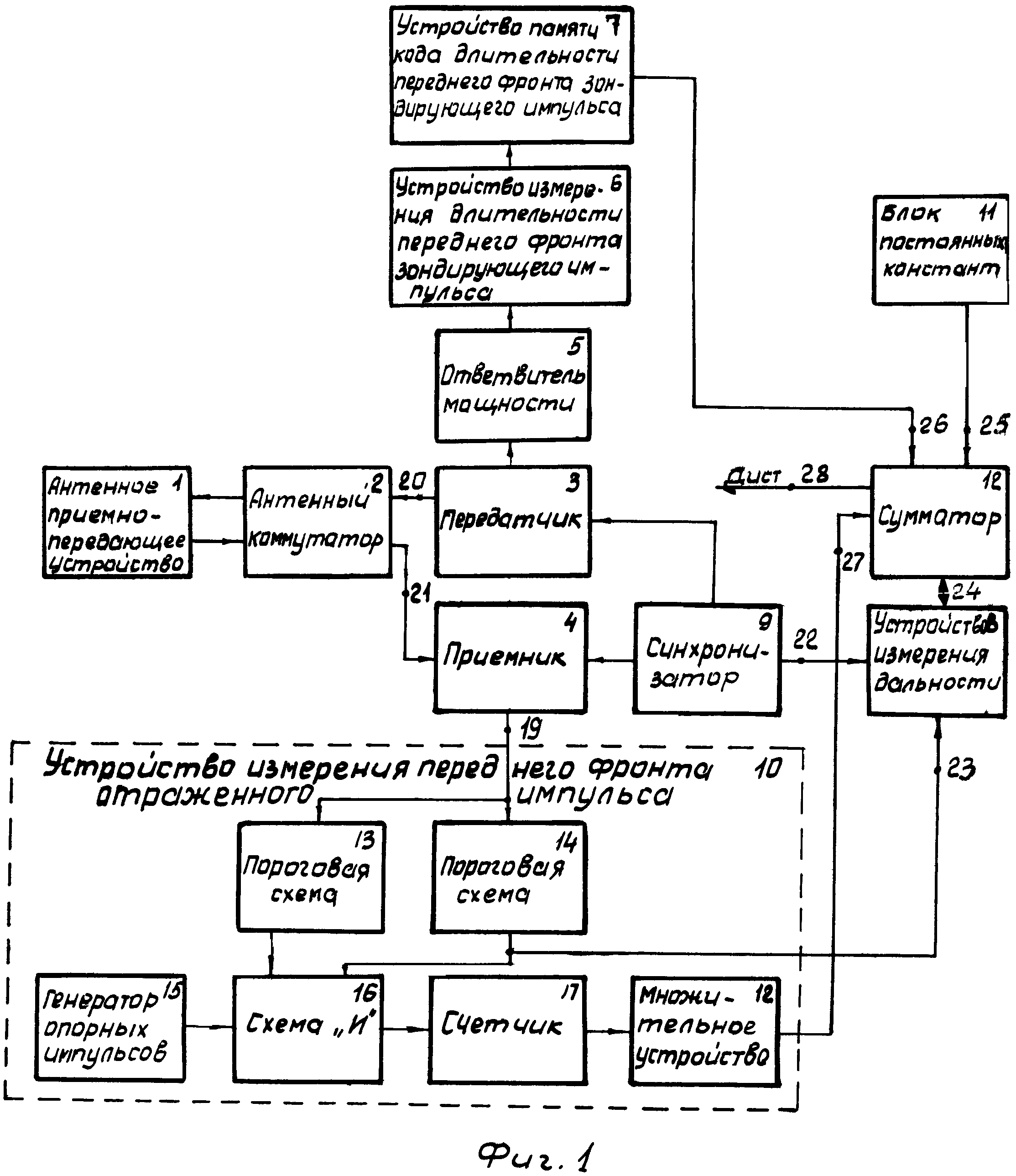
Пассивная система определения координат источников излучения
Пеленгатор систем пассивного целеуказания
Устройство автоматического измерения длительности импульса
Устройство для контроля пеленгатора
Устройство для временной идентификации последовательностей сигналов

