Результат интеллектуальной деятельности: ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА
Вид РИД
Изобретение
Изобретение относится к области измерительной техники, в частности к автоматическим устройствам, используемым для лазерной локации и определения положения и ориентации объектов в пространстве.
Известна лазерная локационная система (см. Б.В. Сергеев, В.С. Бойков ″О возможности определения параметров объекта по его изображению на многоэлементном фотоприемнике. - Специальные вопросы электродинамики и техники лазерных систем. Межвузовский сборник. Л., 1980 г., стр. 121), содержащая излучатель с заданным распределением энергии по сечению пучка, приемный объектив, многоэлементный фотоприемник, чувствительная поверхность которого расположена в фокальной плоскости приемного объектива, и схему обработки сигналов, определяющая угловое положение объекта по смещению энергетического центра его изображения относительно оптического центра фотоприемника, координаты которого в плоскости чувствительной поверхности фотоприемника определяются выражениями:
 ,
, 
где Uij - выходной сигнал ij-го элемента фотоприемника, содержащего набор прямоугольных фоточувствительных площадок размерами a×b, разделенных зазорами, который равен

где µ0 - интегральная чувствительность фотоприемника;
µ(ξ-ξi, η-ηi) - распределение чувствительности по ij-му элементу;
ξi, ηj - координаты элементов фотоприемника.
Недостатками данной системы является большое количество каналов регистрации и обработки сигналов, усложняющее обработку информации и конструктивное выполнение устройства, снижающее его быстродействие, а также наличие погрешности, вызванной изменением чувствительности по каналам и дискретизацией фоточувствительной поверхности фотоприемника.
Наиболее близким к заявляемому по конструкции устройством является устройство оптико-электронного координатора, описанное в (см. Е.Г. Лебедько, Л.Ф. Парфирьев, Ф.И. Хантун. Теория и расчет импульсных и цифровых оптико-электронных систем. Л., Машиностроение, 1984 г., стр. 9) и представляющее собой четырехканальный координатор линейного типа, содержащее излучатель, приемный объектив, квадрантный фотоприемник, имеющий четыре квадратных чувствительных элемента, расположенных в фокальной плоскости приемного объектива и схему обработки сигналов, использующее зависимость величины принимаемых сигналов от направления прихода излучения и выделяющее сигналы рассогласования по двум координатам согласно выражениям:
 ,
,  .
.
где Uа, Uб, Uв, Uг - сигналы, поступающие с соответствующих квадрантов фотоприемника.
Недостатками этого устройства является то, что оно позволяет проводить измерения только для объектов, создающих поля излучения по типу точечного источника излучения, и определяет только направление на точку, в которой находится объект, но не измеряет координат энергетического центра протяженного пространственного объекта, и может быть использовано только в качестве нуль-органа в следящих системах. Кроме того, оно имеет малый диапазон чувствительности по перемещению (см. Измерение энергетических параметров и характеристик лазерного излучения. Под ред. А.Ф. М., Радио и связь, 1981 г., стр. 258).
Таким образом, в первом случае определяются координаты энергетического центра изображения объекта в плоскости чувствительной поверхности матричного фотоприемника, и по их смещению относительно оптического центра определяется угловое положение пространственного объекта в опорной системе отсчета, связанной с лазерным локатором. Но наличие в устройстве отмеченных выше источников погрешностей не позволяет определить положение объекта с достаточной степенью точности. Кроме того, устройство конструктивно сложно и ограничено по быстродействию из-за большого числа каналов приема и обработки сигналов.
Во втором случае координаты энергетического центра протяженного пространственного объекта вообще не измеряются.
Целью изобретения является повышение точности измерений координат энергетического центра пространственных протяженных объектов при сохранении простоты конструктивного выполнения устройства и скорости обработки информативных сигналов.
Указанная цель достигается за счет того, что в известное устройство - лазерный локатор, содержащий излучатель (лазер), приемный объектив и квадрантный фотоприемник, четыре усилителя, семь сумматоров, два инвертора и блок автоматической регулировки усиления (АРУ), входы усилителей которого подключены к соответствующим квадрантам фотоприемника, выход первого усилителя соединен с первыми входами первого, третьего и седьмого сумматоров, выход второго усилителя соединен со вторыми входами первого, седьмого сумматоров и первым входом второго сумматора, выход третьего усилителя соединен со вторым входом второго сумматора, первым входом четвертого сумматора и третьим входом седьмого сумматора, выход четвертого усилителя соединен со вторыми входами третьего, четвертого сумматоров и четвертым входом седьмого сумматора, выход первого сумматора соединен с первым входом пятого сумматора, выход второго сумматора соединен с входом первого инвертора, выход третьего сумматора соединен с первым входом шестого сумматора, а выход четвертого сумматора соединен со входом второго инвертора, выход первого инвертора соединен со вторым входом шестого сумматора, выход второго инвертора соединен со вторым входом пятого сумматора, выход седьмого сумматора соединен со входом АРУ, а выход АРУ соединен со вторыми входами первого, второго, третьего и четвертого усилителей, введена диафрагма, центр которой совмещен с оптической осью квадрантного фотоприемника, а стороны отверстия диафрагмы параллельны сторонам квадрантов фотоприемника, и установлен в передней главной плоскости приемного объектива, а квадрантный фотоприемник размещен на расстоянии ″l″ от задней главной плоскости приемного объектива, равном

где r - размер стороны квадранта фотоприемника;
β - угол поля зрения приемного объектива, при этом размер стороны зоны пропускания диафрагмы определяется из соотношения:
 ,
,
где f′ - фокусное расстояние приемного объектива (см. Приложение).
Заявляемое устройство отличается от прототипа конструктивно тем, что в нем имеется новый элемент - диафрагма с заданной конфигурацией зоны пропускания и новые связи между такими элементами устройства как диафрагма, приемный объектив и фотоприемник, что выражается в их расположении относительно друг друга и взаимной зависимости их размеров, связанных определенными, указанными выше соотношениями.
Таким образом, благодаря вновь введенному элементу появляются новые связи между этим элементом и элементами, имеющимися и в прототипе. То есть заявляемая совокупность отличается от известных ранее. Кроме того, у заявляемой совокупности появляется новое свойство, отличное от свойства прототипа и известных решений, позволяющее измерять координаты энергетического центра протяженных пространственных объектов с высокими скоростью и точностью.
Налицо наличие положительного эффекта от использования изобретения, заключающегося в повышении точности измерений пространственного положения объектов при сохранении скорости выделения и обработки информативных сигналов и конструктивной простоты устройства.
Таким образом, заявляемое устройство имеет новые, отличные от прототипа и известных решений признаки и связи, взаимодействие которых позволяет получить новое свойство заявляемой совокупности и добиться положительного эффекта при его использовании.
Сущность изобретения поясняется чертежами:
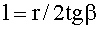
- на фиг. 1 представлена структурная схема устройства;
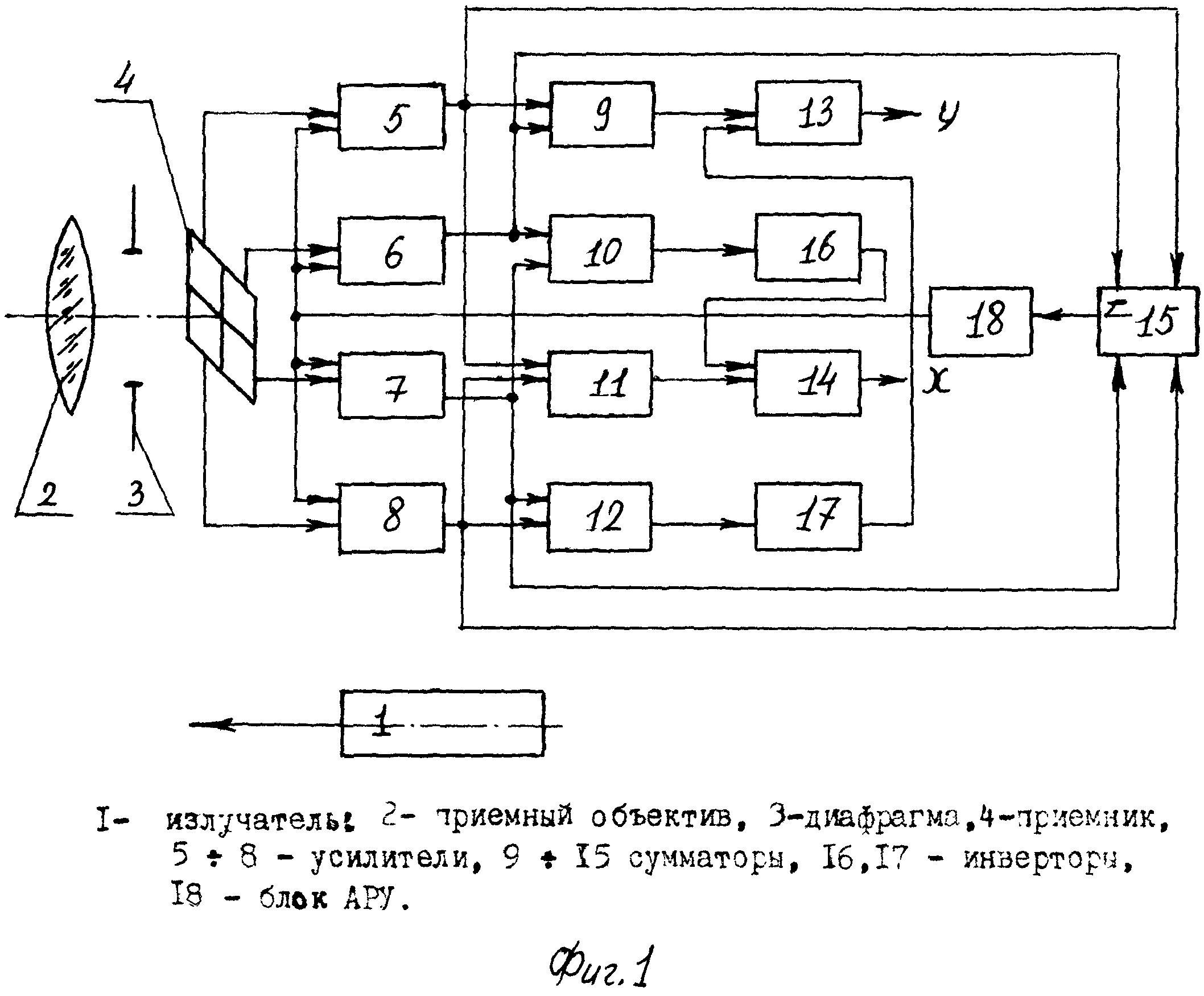
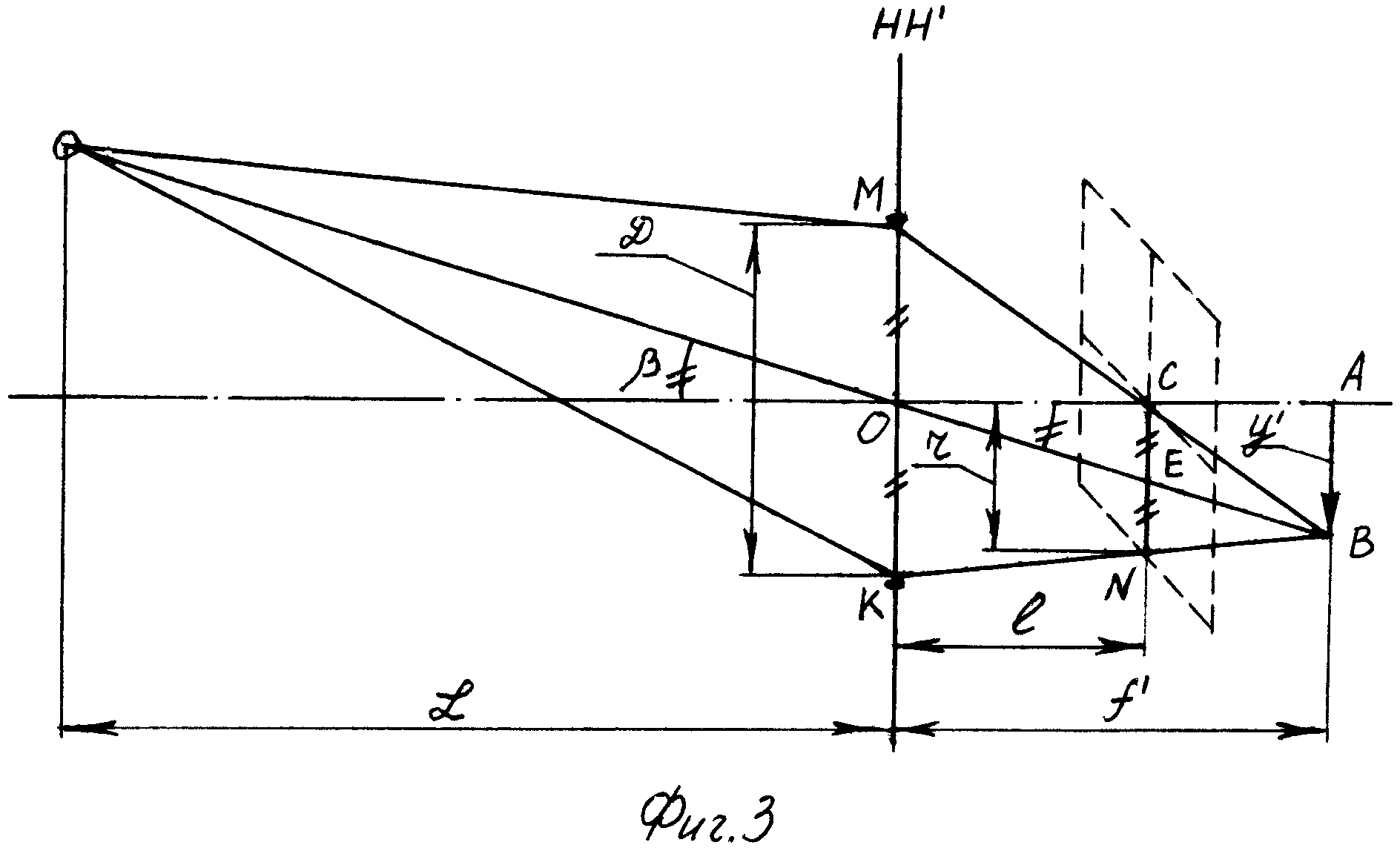
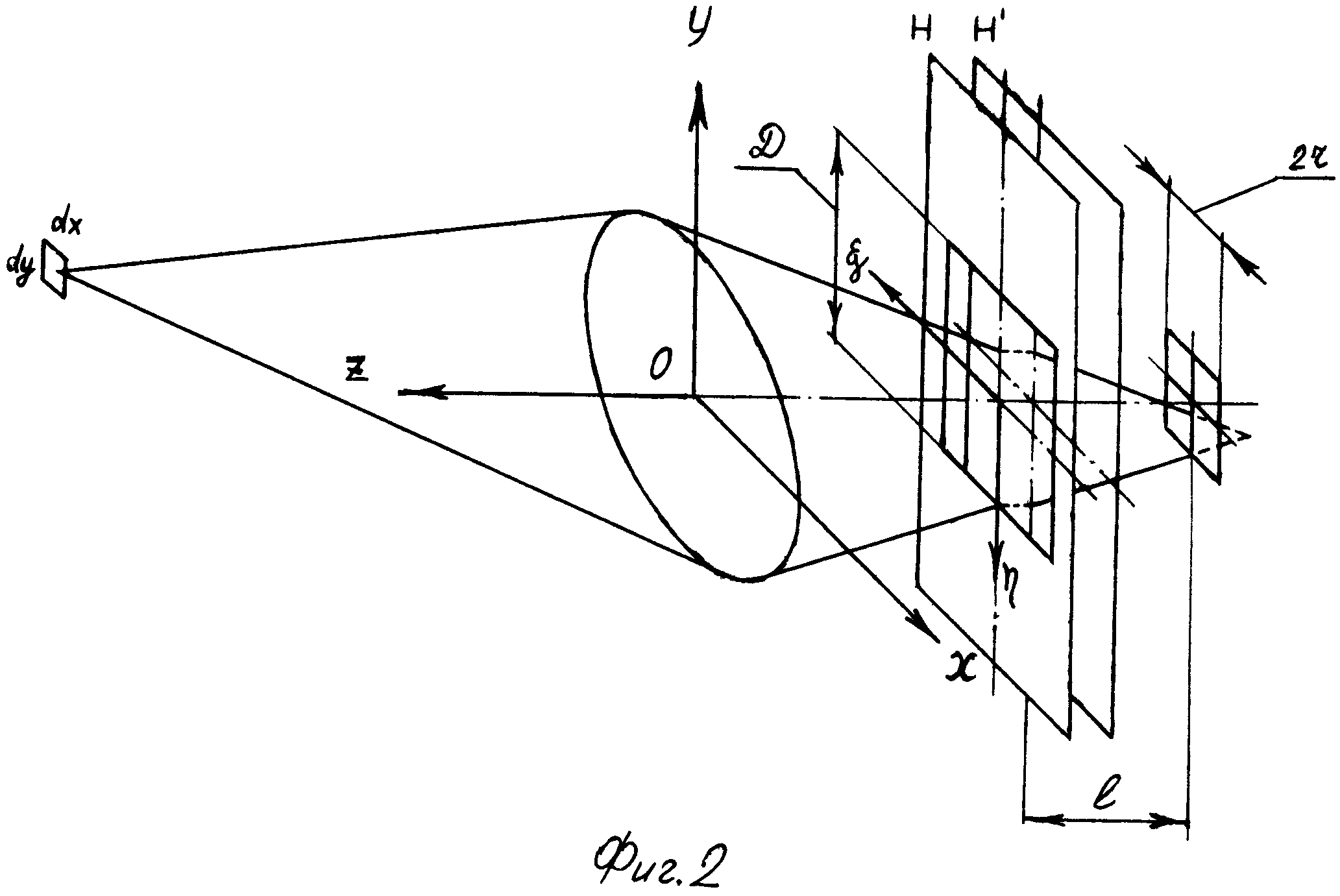
- фиг. 2, 3 поясняют взаимосвязь размеров диафрагмы, квадрантов фотоприемника и объектива и их взаимное расположение.
Устройство содержит (см. фиг. 1) излучатель 1, приемный объектив 2, диафрагму 3, а также первый, второй, третий и четвертый усилители соответственно 5, 6, 7 и 8, первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры 9, 10, 11, 12, 13, 14 и 15 соответственно, первый и второй инверторы 16 и 17 соответственно, и блок АРУ-18 - автоматической регулировки усиления.
Выход усилителя 5 соединен с первыми входами сумматоров 9, 11 и 15, выход усилителя 6 соединен со вторыми входами сумматоров 9, 15 и первым входом сумматора 10, выход усилителя 7 соединен со вторым входом сумматора 10, первым входом сумматора 12 и третьим входом сумматора 15, выход усилителя 8 соединен со вторыми входами сумматоров 11 и 12 и четвертым входом сумматора 15.
Выход сумматора 9 соединен с первым входом сумматора 13, выход сумматора 10 соединен со входом инвертора 16, выход сумматора 11 соединен с первым входом сумматора 14, выход сумматора 12 соединен со входом инвертора 17, выход инвертора 16 соединен со вторым входом сумматора 14, выход инвертора 17 соединен со вторым входом сумматора 13, выход сумматора 15 соединен со входом блока АРУ 18 и выход блока АРУ соединен со вторыми входами усилителей 5, 6, 7, 8.
Диафрагма имеет квадратную зону пропускания и расположена в передней главной плоскости приемного объектива, причем центр диафрагмы совмещен с оптической осью квадрантного фотоприемника, а стороны отверстия диафрагмы параллельны сторонам квадрантов фотоприемника, расположенного на расстоянии ″l″ от его чувствительной поверхности до задней главной плоскости объектива, равном

где r - размер стороны квадранта фотоприемника;
β - угол поля зрения приемного объектива;
а размер стороны зоны пропускания диафрагмы равен
 ,
, 
где f′ - фокусное расстояние приемного объектива.
В качестве источника излучения используется лазер любого типа с формирующей оптической системой.
В качестве приемного объектива используется телеобъектив, работающий в обратном ходе лучей.
Диафрагму изготавливают из любого непрозрачного в заданной области излучения материала механической обработкой, либо методом фотолитографии. Поверхность диафрагмы покрыта поглощающим материалом, например, черной замшей для исключения бликов.
В качестве квадрантного фотоприемника использован любой известный четырехплощадный фотодиод, например, ФД-142К.
Все электронные блоки схемы обработки сигналов построены по общеизвестным схемам с использованием известных аналоговых и аналого-цифровых элементов средств электроники, выполняющих известные операции.
Блоки 5÷8 представляют собой усилители с регулируемым коэффициентом усиления, собранные на операционных усилителях, например, серии 153УД2 по схеме усилителя с дифференциальным каскадом (см. А.Г. Алексеенко и др. ″Применение прецизионных аналоговых микросхем″, М.: ″Радио и связь″, 1985 г., рис. 2.11, стр. 93, а также книга ″Функциональные устройства на микросхемах″, М.: ″Радио и связь″, 1985 г., рис. 1.14, стр. 24).
Блоки 9÷15 представляют собой сумматоры, собранные на микросхемах, например серии 153УД2 по типовым схемам (см. например Л. Фонкенберри ″Применение операционных усилителей и линейных интегральных схем″ М., ″Мир″ - 1985 г., гл. 5, суммирующие схемы рис. 5.5, стр. 113).
Блоки 16÷17 представляют собой инвертирующие усилители, собранные на тех же микросхемах серии 153УД2 по типовой схеме (см. Л. Фонкенберри ″Применение операционных усилителей и линейных ИС″, М., Мир, 1985 г., рис. 2.7, стр. 37).
Блок 18, вырабатывающий сигнал для управления автоматической регулировкой усиления, собран по типовой схеме пикового детектора на операционных усилителях серии 153УД2 (см. Л. Фонкенберри ″Применение операционных усилителей и линейных ИС″, М., ″Мир″, 1985 г., рис. 9.1, стр. 234).
Работа устройства основана на следующих принципах. Если шум фонового излучения не является преобладающим, то отраженный от объекта поток лазерного излучения может быть зарегистрирован фотоприемником приемного устройства.
Объект освещается излучением лазера с известным законом распределения энергии по сечению пучка. При достаточно большом расстоянии ″L″ от объекта до приемного устройства, считая коэффициент отражения излучения от объекта постоянным, а поверхность объекта, рассеивающей диффузно по закону Ламберта, распределение яркости на поверхности объекта будет представлено функцией

Поток излучения dF, приходящий на каждый квадрант чувствительной поверхности фотоприемника от элемента излучающей поверхности объекта равен

(см. Мирошников М.М., Теоретические основы оптико-электронных приборов, Л., Машиностроение, 1977 г. Гудмен Дж. Введение в Фурье-оптику. М., Мир, 1970 г.),
где α - угол между направлением на объект и нормалью к элементу излучающей поверхности объекта;
dω - телесный угол, в котором распространяется поток излучения от элемента излучающей поверхности объекта;

где S - площадь сечения конуса излучения;
φ - угол между направлением на объект и нормалью к площадке;
L - расстояние между элементом излучающей поверхности объекта и площадкой S.
Отсюда

а весь поток излучения, падающий на площадку S, можно получить в виде суммы потоков, приходящих от различных элементов излучающей поверхности объекта

Поток излучения, приходящий на i-й квадрант фотоприемника, при этом определяется величиной потока излучения, проходящего через эффективную площадь сечения конуса излучения Sэфi плоскости диафрагмы, через которую излучение от различных элементов излучающей поверхности объекта попадает на i-й квадрант фотоприемника. Эффективные площади сечения конуса излучения Sэф1, Sэф2, Sэф3, Sэф4, через которые поток излучения попадает на 1-й, 2-й, 3-й и 4-й квадранты фотоприемника, соответственно, равны:
 ,
,
 ,
,
 ,
,
 ,
,
где S0=D2 - площадь зоны пропускания диафрагмы;
x, y - текущие координаты каждого элемента излучающей поверхности объекта;
ξ, η - текущие координаты в плоскости диафрагмы;
 ,
,  .
.
Поток излучения в виде суммы потоков от каждого элемента излучающей поверхности объекта с координатами x, y, попавший на соответствующий квадрант фотоприемника, преобразуется фотоприемником в электрический сигнал

где ni - коэффициент преобразования потока излучения, представляющий собой постоянную величину для данного фотоприемника, условно, для простоты дальнейшего изложения, можно принять его равным 1;
с учетом того, что расстояние L велико, а углы α и φ - малы и мало зависят от координат x, y.
С учетом последнего C0 можно рассматривать как постоянный коэффициент и вынести его из-под знака интеграла

Суммируя сигналы 1-го, 2-го, 3-го и 4-го квадрантов фотоприемника попарно, получим:

 ,
,
где  ;
;
 ;
;
 ,
,
 .
.
Просуммировав все четыре сигнала, получим сигналы:
 .
.
Далее вычитанием соответствующих сигналов получим сигналы:
 ,
,
 .
.
Разделив последние два сигнала на сумму всех четырех сигналов, подучим сигналы, пропорциональные координатам x, y энергетического центра пространственного объекта:
 ,
,

Устройство работает следующим образом.
Пространственный объект подсвечивается сформированным пучком излучения лазера от излучателя 1 (см. фиг. 1).
Отраженный от объекта поток лазерного излучения в виде суммы потоков от каждого элемента излучающей поверхности объекта принимается приемным объективом 2, проходит через диафрагму 3, попадает на квадрантный фотоприемник 4 и преобразуется в электрические сигналы квадрантов фотоприемника, пропорциональные приведшим на них потокам излучения J1, J2, J3, J4, которые поступают на входы усилителей 5, 6, 7, 8.
С выходов усилителей сигналы J1, J2, J3, J4 поступают на входы сумматора 15, где производится их суммирование

и сигнал J9, равный их сумме, поступает с выхода сумматора 15 на вход схемы 18 АРУ, с выхода которой управляющий сигнал J9 поступает на входы усилителей 5, 6, 7, 8, осуществляя деление сигналов J1, J2, J3, J4 на их сумму.
Затем с выходов усилителей 5, 6 сигналы J1, J2 поступают на входы сумматоров 9, 10, 11, а сигналы J3, J4 с выходов усилителей 7, 8 поступают на входы сумматоров 10, 11, 12. Сигналы J1, J2 суммируются сумматором 9

и сигнал J5, равный сумме сигналов, поступает с выхода сумматора 9 на вход сумматора 13.
Сигналы J3, J4 суммируются сумматором 12

и сигнал J6, равный сумме сигналов, с выхода сумматора 12 поступает на вход инвертора 17.
Сигналы J1, J4 суммируются сумматором 11:

и сигнал J7, равный сумме сигналов, поступает с выхода сумматора 11 на вход сумматора 14.
Сигналы J2, J3 суммируются сумматором 10:

и сигнал J8, равный сумме сигналов, поступает с выхода сумматора 10 на вход инвертора 16. С выхода инвертора 16 сигнал поступает в противофазе на вход сумматора 14, на другой вход которого поступает сигнал J7. Сигналы J7, J8 суммируются

и на выходе сумматора 14 образуется сигнал J11, пропорциональный координате "Х" энергетического центра пространственного объекта:

С выхода инвертора 17 сигнал J6 поступает в противофазе на вход сумматора 13, на другой вход которого поступает сигнал J5. Сигналы J5 и J6 суммируются

и на выходе сумматора 13 образуется сигнал J10, пропорциональный координате "Y" энергетического центра пространственного объекта

Таким образом, заявленное устройство позволяет измерять координаты энергетического центра протяженных пространственных объектов и по их смещению относительно оптического центра определять положение объектов в опорной системе отсчета, связанной с лазерным локатором с высокой точностью, благодаря высокой точности реализации линейного закона зависимости весовых коэффициентов интегрируемых приемником излучения сигналов от каждого элемента излучающей поверхности объекта. Диапазон перемещений энергетического центра объекта определяется полем зрения приемного объектива и расстоянием до объекта.
ПРИЛОЖЕНИЕ К ОПИСАНИЮ ИЗОБРЕТЕНИЯ
На фиг. 2, 3 показано взаимное расположение элементов заявленного устройства в пространстве относительно друг друга и с их помощью иллюстрируется вывод соотношений, указанных в формуле изобретения. На фиг. 3 приемный объектив для простоты условно показан своими двумя совмещенными главными плоскостями НН′. Так как расстояние L от плоскости расположения пространственного объекта до приемного объектива очень велико, то изображение этой плоскости пространства практически находится в фокальной плоскости приемного объектива. То есть задний отрезок S′, характеризующий расстояние от совмещенных главных плоскостей приемного объектива до плоскости изображения, практически равен фокусному расстоянию объектива

Величина изображения y′ при этом равна
y′=f′tgβ,
где β - угол поля зрения приемного объектива.
Квадрантный фотоприемник устанавливается на расстояние ″l″ от диафрагмы, находящейся в плоскости совмещенных главных плоскостей объектива, таким образом, чтобы луч, приходящий с края поля зрения объектива (см. фиг. 3) на нижний край диафрагмы, попадал на нижний край чувствительной площадки фотоприемника, а луч, приходящий с края поля зрения на верхний край диафрагмы, попадал на центр фотоприемника, как и показано на фиг. 3.
Если β - угол поля зрения объектива, то согласно законам геометрической оптики
 ,
,
а так как вследствие законов геометрии треугольники MBK и CBN подобны и  , то
, то 
где D - размер стороны отверстия диафрагмы;
r - размер стороны квадранта фотоприемника.
Тогда

Так как треугольники ОМС и САВ подобны, то можно составить пропорцию
 ,
,
или, учитывая, что
 ,
,  ,
,  ,
,  ,
, 
Отсюда находим
 ,
,
 .
.