Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ
Вид РИД
Изобретение
Изобретение относится к системам автоматического управления летательными аппаратами (ЛА) как пилотируемыми, так и беспилотными.
Известны способы предупреждения столкновения ЛА с рельефом местности, в которых определяют местоположение ЛА с помощью навигационной системы, производят определение параметров текущего динамического состояния, экстраполируют упомянутые параметры текущего динамического состояния на заданный временной интервал, вычисляют прогнозируемую траекторию, сопоставляют ее с рельефом местности и предупреждают об опасности столкновения. При этом предупреждение об опасности столкновения осуществляется, как правило, с помощью формирования в направлении полета защитного пространства с аварийной сигнальной областью. Информирование экипажа о наличии опасного рельефа производится в два этапа: в случае пересечения рельефа защитным пространством вне аварийной сигнальной области (предупреждающая сигнализация) и в случае пересечения рельефа аварийной сигнальной областью (аварийная сигнализация).
Ограниченностью применения таких способов является недостаточная надежность предотвращения столкновений ЛА с рельефом, так как они не предусматривают ситуации, когда при обнаружении опасного рельефа по курсу будет невозможно обойти его путем набора высоты ЛА.
Известны способы предупреждения столкновения, основанные на выходе из опасной ситуации путем оценки возможности вертикального маневра [1], а при отрицательном результате такой оценки путем определения направления разворота [2].
Известен способ формирования увода ЛА с опасной высоты «Способ предупреждения столкновения самолетов и вертолетов с рельефом местности и устройство на его основе» RU № 2376645 [3].
Суть заявляемого способа предупреждения столкновения самолетов и вертолетов с рельефом местности состоит в том, что определяют местоположение летательного аппарата с помощью навигационной системы, производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию, при этом непрерывно вычисляют на основе параметров текущего динамического состояния минимально допустимые радиусы разворота, затем прогнозируют упомянутые радиусы разворота на время определения потенциально опасного рельефа, а далее путем сканирования пространства прогнозируемой траекторией формируют безопасный коридор, границы которого определяют с учетом возможности разворота летательного аппарата на обратный курс в соответствии с прогнозируемыми значениями минимально допустимых радиусов разворота, определяют потенциально опасный рельеф сопоставлением упомянутого безопасного коридора с рельефом местности и предупреждают о наличии потенциально опасного рельефа, при этом внутри безопасного коридора формируют защитное пространство с аварийной сигнальной областью прогнозируют аварийную сигнальную область на длину безопасного коридора, причем в случае пересечения рельефа местности безопасным коридором по обе стороны от прогнозируемой траектории, а также в случае пересечения рельефа местности безопасным коридором по одну сторону от прогнозируемой траектории и одновременно прогнозируемой аварийной сигнальной областью производят исследование пространства путем вариаций параметров безопасного коридора и соответствующей прогнозируемой траектории последовательным перебором возможных изменений траекторного угла, допустимых радиусов разворота в диапазонах возможных изменений величины путевой скорости и направления бокового маневрирования, определяют безопасные варианты изменения параметров полета и соответствующие им маневры летательного аппарата, упомянутые маневры летательного аппарата отображают в удобной для пилота форме для выбора наиболее эффективного из них по условиям полета.
Наиболее близким техническим решением к заявляемому изобретению является изобретение по патенту RU №2388058 «Способ и система для содействия пилотированию воздушного судна, летящего на малой высоте» [4] (принято за прототип).
Изобретение относится к системам управления самолетом. Способ заключается в том, что автоматически и повторяющимся образом выполняются операции определения траектории уклонения, определения профиля местности, определения предельного угла, представления пилоту на просмотровом экране характерного знака, который отображает предельный угол и который связан с угловой шкалой. Система содержит первое средство для определения траектории уклонения, второе средство для определения профиля местности, третье средство для определения предельного угла, средство отображения для представления на просмотровом экране характерного знака. Воздушное судно по первому варианту содержит вышеуказанную систему. Воздушное судно по второму варианту содержит вышеуказанную систему, которая осуществляет способ, заключающийся в том, что автоматически и повторяющимся образом выполняются операции определения траектории уклонения, определения профиля местности, определения предельного угла, представления пилоту на просмотровом экране характерного знака, который отображает предельный угол и который связан с угловой шкалой. Технический результат заключается в повышении безопасности.
Для достижения указанного технического результата согласно настоящему изобретению упомянутый способ примечателен тем, что автоматически и повторяющимся образом выполняются операции, на которых:
а) определяют по меньшей мере одну траекторию уклонения по меньшей мере на предопределенном расстоянии перед воздушным судном, причем упомянутая траектория уклонения соответствует боковой траектории на малой высоте и содержит по меньшей мере один боковой поворот;
b) определяют профиль местности, находящейся под этой траекторией уклонения;
c) в зависимости от упомянутого профиля местности определяют по меньшей мере первый предельный угол, соответствующий углу, по которому должен лететь самолет, чтобы иметь возможность пролететь над упомянутой местностью по всему упомянутому предопределенному расстоянию вдоль упомянутой траектории уклонения;
d) представляют пилоту на просмотровом экране по меньшей мере первый характерный знак, который отображает упомянутый первый предельный угол и который связан с угловой шкалой, с которой также связан символ, иллюстрирующий вектор путевой скорости воздушного судна.
Недостатком использования существующего метода является тот факт, что для выполнения увода с опасной высоты, во-первых, летчику предоставляется несколько вариантов траекторий увода, для выбора наиболее эффективного из них в условиях необходимости быстрого принятия решения, что увеличивает психическую и физическую нагрузку летчика, во-вторых, приводит к существенному усложнению программно-алгоритмического обеспечения системы автоматического управления (САУ) ЛА, что может отразиться на итоговой надежности САУ. В связи с этим крайне актуальной становится задача выполнения автоматического увода ЛА с опасной высоты, легкореализуемой в САУ существующих и перспективных ЛА.
Предлагаемое изобретение направлено на решение задачи обеспечения устойчивости движения и безопасности выполнения летательным аппаратом (ЛА) пикирующего маневра. Технический результат заключается в повышении безопасности полета в режиме увода ЛА с опасной высоты.
Технический результат достигается за счет применения способа управления, который реализуется в системе управления в продольном канале пилотируемых и беспилотных летательных аппаратов в режиме увода с опасной высоты при работе по наземным объектам (Система) с астатическим законом управления по невязке угловой скорости тангажа.
Система состоит из модальной системы дистанционного управления (СДУ) и цифровой системы траекторного управления (СТУ), радиовысотомера малых высот (РВ), системы воздушных сигналов (СВС) для измерения вертикальной скорости Vy и воздушной скорости V, бесплатформенной инерциальной навигационной системы (БИНС) в составе датчика нормальной перегрузки nу, датчика угловой скорости тангажа ωz, датчика положения ручки летчика Хр.
В СДУ поступают данные с датчиков первичной информации БИНС, от СВС, РВ и датчика положения ручки летчика Хр. В состав СДУ входят блок формирования приведенного коэффициента подъемной силы  в зависимости от условий полета по высоте и воздушной скорости, вычислитель желаемой передаточной функции Wж(р) по критерию Шомбера-Гертсена [5] оптимальной управляемости по угловой скорости тангажа ωzm, на вход которого подключены сигналы
в зависимости от условий полета по высоте и воздушной скорости, вычислитель желаемой передаточной функции Wж(р) по критерию Шомбера-Гертсена [5] оптимальной управляемости по угловой скорости тангажа ωzm, на вход которого подключены сигналы  и Хр, и вычислитель формирования астатической невязки по разности (ωz-ωzm), входы которого соответственно соединены с датчиками угловой скорости тангажа ωz и вычислителем Wж(p), а выход соединен с первым входом электрогидравлического привода, второй вход которого соединен с выходом демпфера по сигналу ωzm и nу. Модальная СДУ работает на всех режимах полета ЛА.
и Хр, и вычислитель формирования астатической невязки по разности (ωz-ωzm), входы которого соответственно соединены с датчиками угловой скорости тангажа ωz и вычислителем Wж(p), а выход соединен с первым входом электрогидравлического привода, второй вход которого соединен с выходом демпфера по сигналу ωzm и nу. Модальная СДУ работает на всех режимах полета ЛА.
Для обеспечения формирования закона управления в состав СТУ введены вычислитель управления высотой (ВУВ) и вычислитель алгоритма (ВАСОВ) формирования сигнала опасной высоты Ноп, на вход которого поступают сигнал текущей высоты с выхода радиовысотомера НРВ, сигнал безопасной высоты Hбо=Ноп+ΔH, введенный на пульте РВ и корректируемый сигнал вертикальной скорости с выхода СВС.
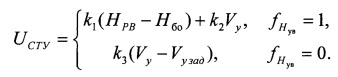
При условии НРВ≤Нбо+k⋅Vy с выхода ВАСОВ выдается сформированный сигнал Ноп, который поступает на вход вычислителя управления высотой (ВУВ) и обеспечивает начало его работы. Также на соответствующие входы ВУВ поступают сигналы НРВ, Нбо и k⋅Vу, при этом на выходе ВУВ формируется сигнал управления гидравлическим приводом ЛА в виде:

где UСТУ=k1(HPB-Hбо)+k2Vy – управляющий сигнал СТУ;
k - масштабный коэффициент для формирования скорректированного значения вертикальной скорости Vускор;
k1 - коэффициент закона управления СТУ в невязке по высоте;
k2 - коэффициент закона управления СТУ по вертикальной скорости;
k4 - коэффициент закона управления модальной СДУ в пропорциональной и интегральной составляющих по невязке в угловых скоростях тангажа;
k5 - коэффициент закона управления модальной СДУ по вертикальной перегрузке.
Описание работы Системы
Взятая за прототип система содействия пилотированию воздушного судна, летящего на малой высоте, включает в себя три автоматических действия: сначала задается угол наклона траектории, ЛА начинает набирать высоту, далее срабатывает режим приведения к горизонту и затем выполняется стабилизация заданной высоты полета траекторным контуром управления (СТУ). При этом летчик может испытывать сильные перегрузки, а угловая скорость слежения средствами ПВО может сильно уменьшиться, что в итоге увеличивает вероятность поражения ЛА средствами ПВО.
В целях формирования переходных процессов в контуре «летчик - система автоматического управления», близких к апериодическим, и в целях уменьшения умственной и физической нагрузки, которая непосредственно влияет на безопасность полета, предлагается следующий подход к построению алгоритма синтеза ЛА.
Вводится понятие безопасной высоты, отличающейся от опасной высоты на допустимую величину приращения.
Логика переключения сигналов управления при выполнении увода с опасной высоты формируется следующим образом:
если НРВ>Нбо+Vускор, то из СТУ на вход электрогидравлического привода стабилизатора поступает сигнал управления:
UСТУ=k3(Vy-Vузад), если НРВ<Hбо+Vускор, то UСТУ=k1(НРВ-Hбo)+k2Vy,
где Vy - вертикальная скорость ЛА,
и вводится в закон управления для уменьшения перерегулирования, т.е. выполняет функцию демпфера;
Нбо - безопасная высота,
здесь:
Нбо=Ноп+ΔΗ; НРВ - текущая высота полета, измеренная радиовысотомером малых высот;
UСТУ - управляющий сигнал системы траекторного управления;
k3 - коэффициент закона управления СТУ по невязке в вертикальных скоростях.
В качестве решения задачи обеспечения безопасности полета при работе по наземным целям предлагается алгоритм увода с опасной высоты с применением модальной системы, которая реализуется в СДУ и имеет следующие особенности:
наличие внутреннего контура оптимальной управляемости по критерию Шомбера-Гертсена;
наличие астатического закона управления по невязке угловой скорости тангажа.
Указанный контур СДУ принимает из бортового измерительного комплекса ЛА данные об угловой скорости тангажа, скоростном напоре и нормальной перегрузке.
Процедура выполнения маневра увода с опасной высоты относится к траекторному контуру управления, который в общем случае решает следующие задачи:
управление перегрузкой;
управление высотой полета;
управление вертикальной скоростью;
увод с опасной высоты.
В СТУ для каждого режима управления ЛА сформирован свой алгоритм управления. Перед выполнением пикирования летчик переводит ЛА в заданную точку полетного задания и задает требуемую вертикальную скорость.
На пульте РВ вводится информация о высоте: (Нбо=Ноп+ΔН).
Для обеспечения формирования закона управления СТУ ЛА в вертикальной плоскости при решении задачи увода с опасной высоты используется информация от следующих измерительных средств ЛА:
вертикальная скорость от СВС;
истинная высота полета по показанию радиовысотомера.
Выполняя пикирование, летчик или автоматика задает требуемую вертикальную скорость -Vy.
Алгоритм определения момента получения сигнала Ноп.
Сигнал Ноп ( ) формируется при условии Нбо+Vускор≥НРВ. Этот сигнал запоминается в бортовом вычислителе в целях исключения повторных срабатываний. В этом случае летчику выдаются звуковой и визуальный сигналы об опасной высоте. Если автоматический полет ЛА продолжается, то алгоритм СТУ переводит ЛА в режим управления высотой.
) формируется при условии Нбо+Vускор≥НРВ. Этот сигнал запоминается в бортовом вычислителе в целях исключения повторных срабатываний. В этом случае летчику выдаются звуковой и визуальный сигналы об опасной высоте. Если автоматический полет ЛА продолжается, то алгоритм СТУ переводит ЛА в режим управления высотой.
Логика и законы управления ЛА в режиме увода с опасной высоты имеют следующий вид:
Следовательно, управление осуществляется по высоте для достижения Нбо. При этом обеспечивается выход на Нбо с углом наклона траектории θ=0°. Указанный алгоритм позволяет работать и в холмистой местности со склоном не более 6°.
В итоге на электрогидравлический привод стабилизатора поступает следующий сигнал:

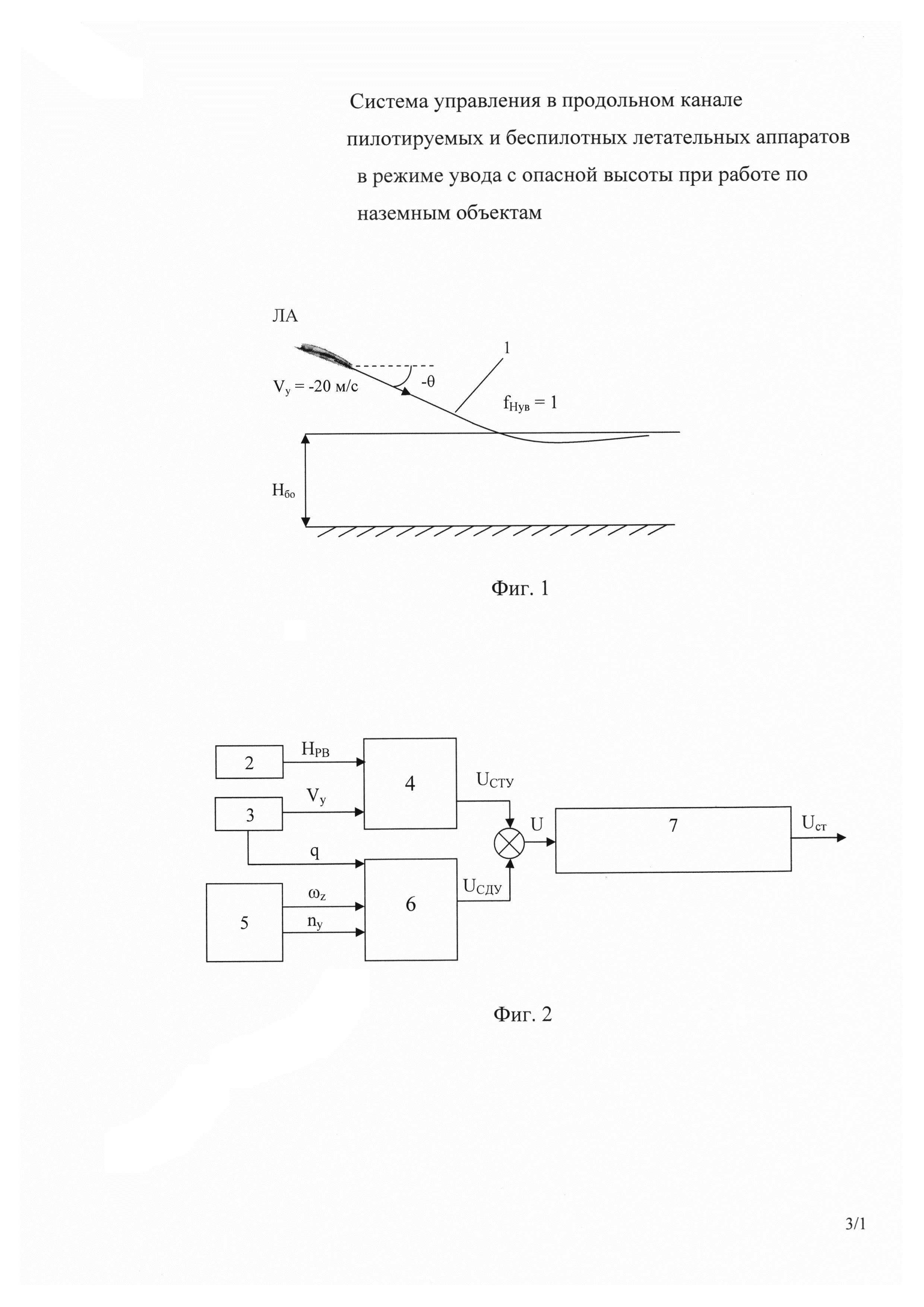
Иллюстрация работы алгоритма приведена на фигуре 1:
1 - траектория ухода ЛА с опасной высоты.
В результате сформированного маневра уменьшается нормальная перегрузка, ЛА выходит на Нбо, a Vy стремится к нулю. При этом полет выполняется на безопасной высоте, летчик может наблюдать за происходящим вокруг и перейти на ручное управление ЛА. Применение указанного способа в итоге приведет к уменьшению умственной и физической нагрузки летчика.
Увод с опасной высоты может быть выполнен полностью в автоматическом режиме. При этом за летчиком остается только функция контроля выполнения увода.
Указанный алгоритм может быть применен в системах автоматического управления современных беспилотных летательных аппаратов с различным комплексом бортового оборудования.
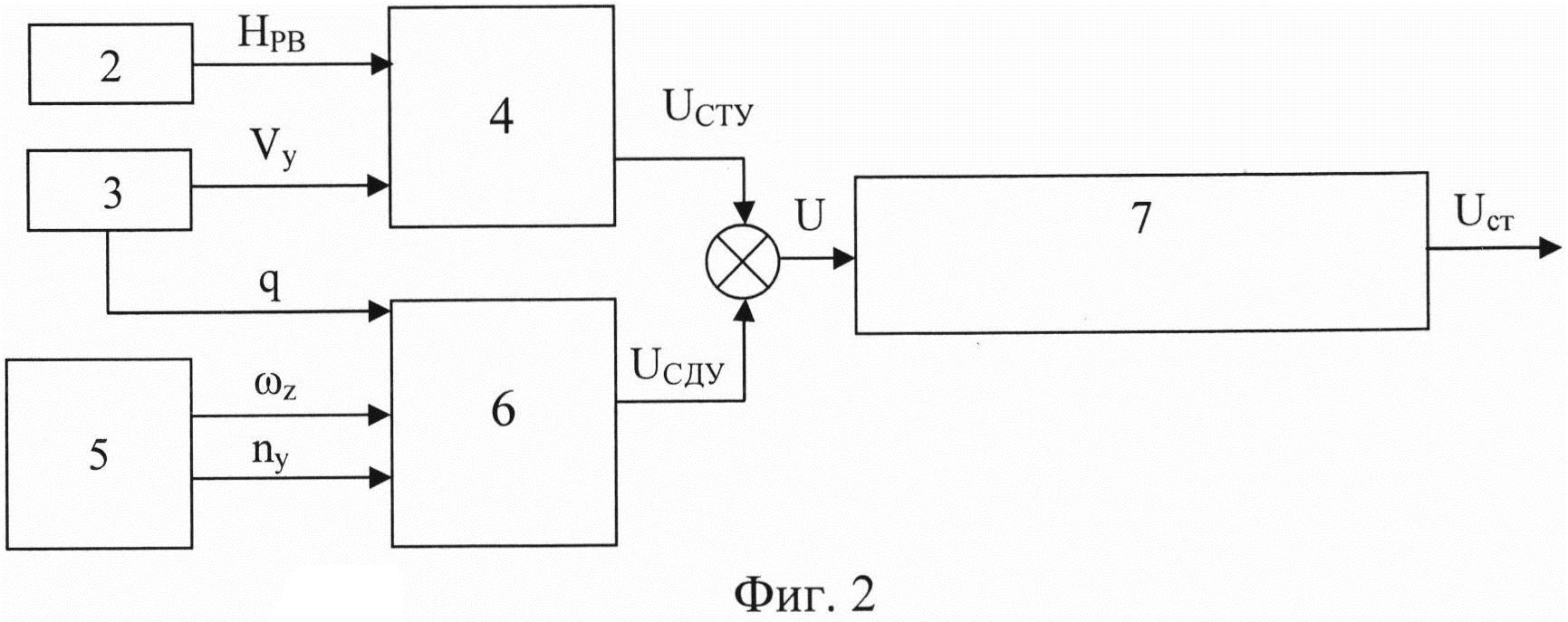
На фигуре 2 приведена структурная схема системы увода самолета с опасной высоты: 2 - радиовысотомер малых высот РВ; 3 - система воздушных сигналов СВС; 4 - цифровая система траекторного управления (СТУ); 5 - бесплатформенная инерциальная навигационная система (БИНС); 6 - модальная система дистанционного управления; 7 - электрогидравлический привод ЛА;
q - сигнал измерения скоростного напора с СВС;
НРВ - сигнал текущей высоты с выхода PB;
Vy - сигнал вертикальной скорости;
ωz - сигнал с датчика угловой скорости тангажа;
nу - сигнал с датчика нормальной перегрузки
U, UСДУ и UСДУ - сигналы управления;
ϕст - угол поворота стабилизатора ЛА.
Результаты моделирования работы системы увода с опасной высоты при M=0,4 представлены ниже на фигурах 3, 4, 5, 6, 7, 8:
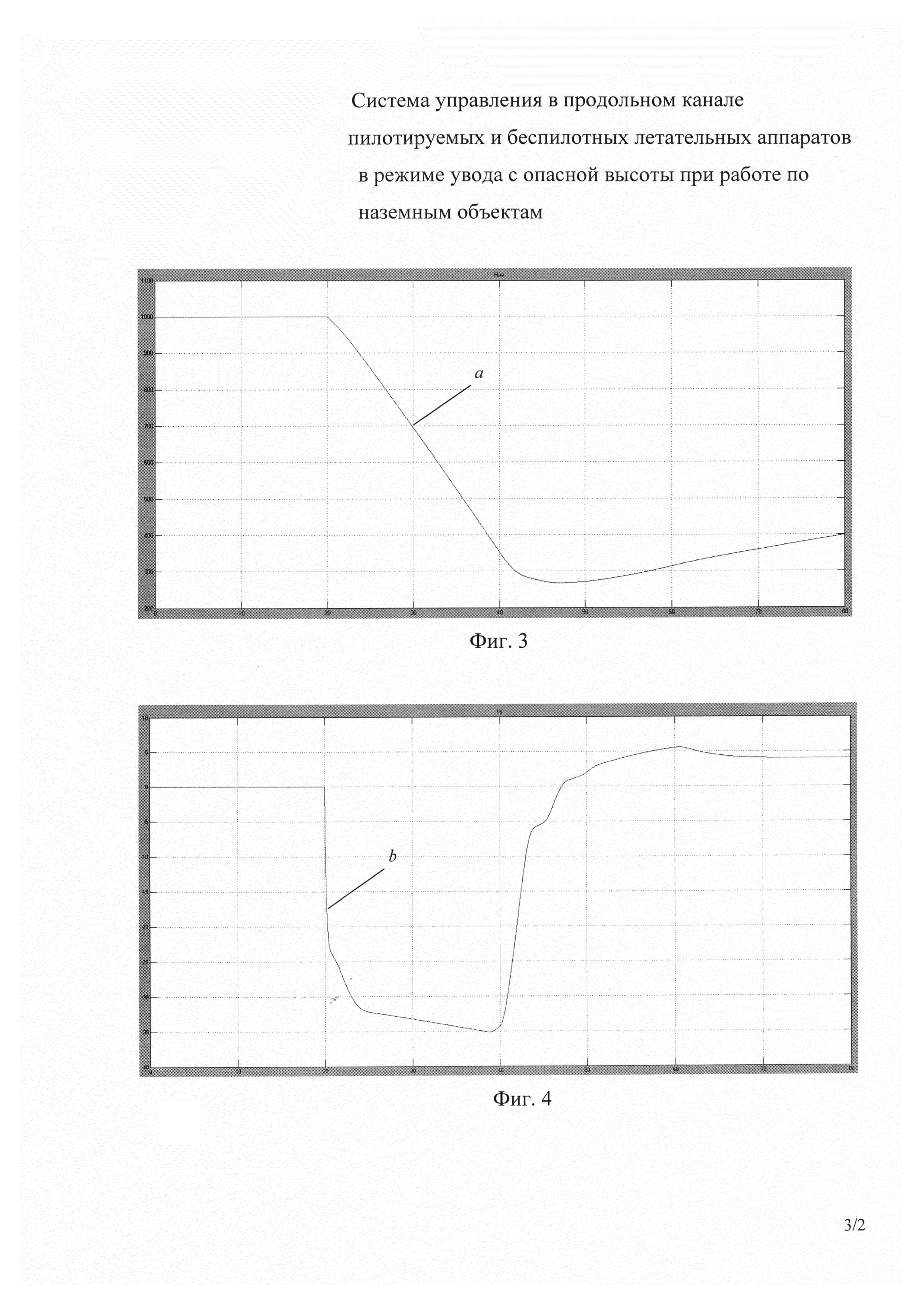
на фигуре 3 изображено: Hrw - значение высоты от радиовысотомера, по оси абсцисс приводится время, в сек;
на фигуре 4 изображена: Vy - величина вертикальной скорости от системы воздушных сигналов, по оси абсцисс приводится время, в сек;
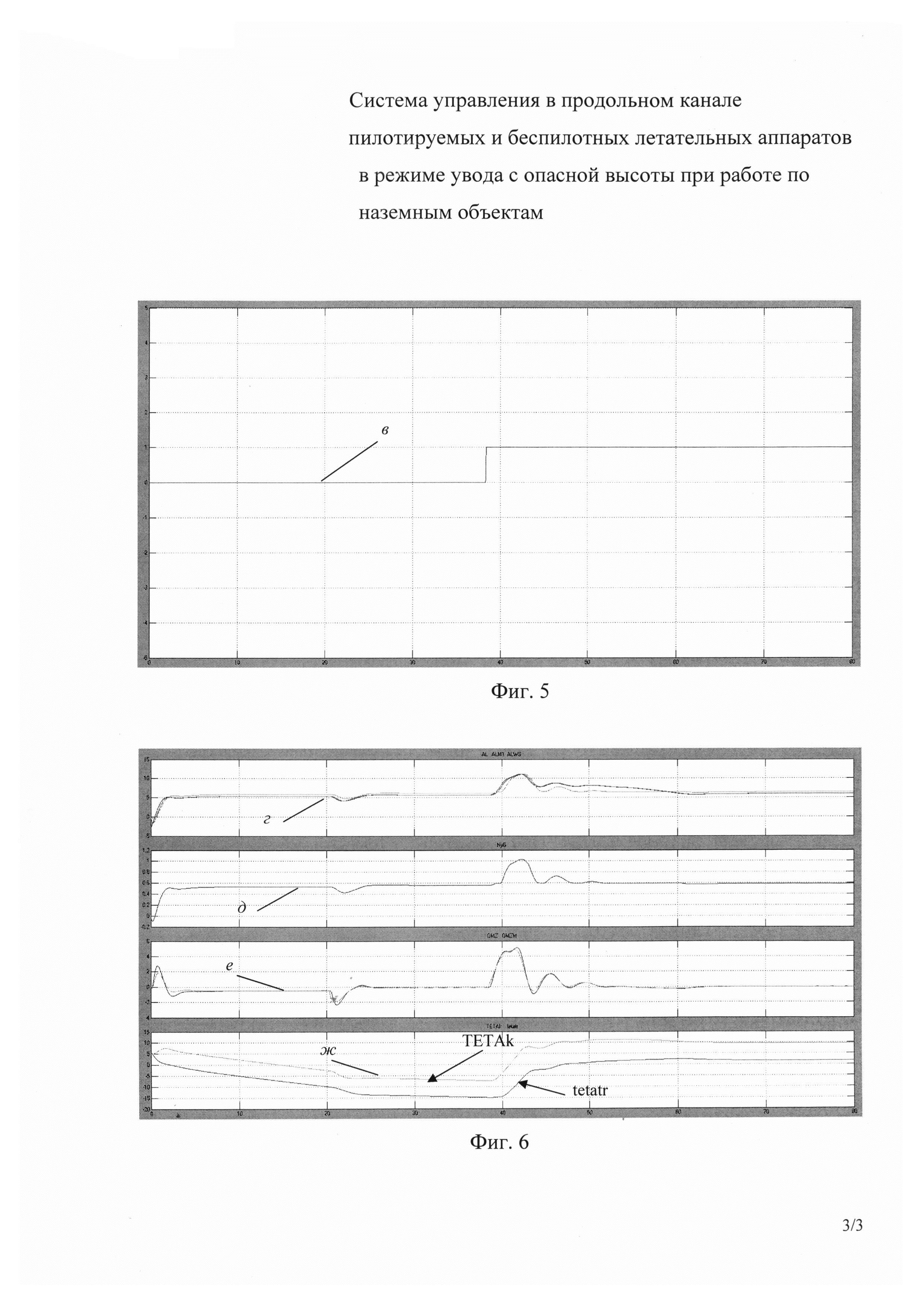
на фигуре 5 показан результат срабатывания признака увода с опасной высоты как функция времени, в сек;
на фигуре 6 показано сравнение данных с выхода желаемой эталонной модели и с выхода объекта в режиме увода с опасной высоты
на фигуре 6, г изображено: AL - значение угла атаки с датчика угла атаки (ДУА), ALM - угол атаки желаемой эталонной модели как функции времени, в сек;
на фигуре 6, д изображена: NyG - величина нормальной перегрузки с датчика линейных ускорений (ДЛУ) (БИНС) как функция времени, в сек;
на фигуре 6, е изображена: OMZ - угловая скорость тангажа с датчика угловой скорости (ДУС) (БИНС), OMZM - угловая скорость тангажа желаемой эталонной модели как функции времени;
на фигуре 6, ж изображен: ТЕТАk - угол тангажа с БИНС, tetatr - угол наклона траектории как функции времени, в сек.
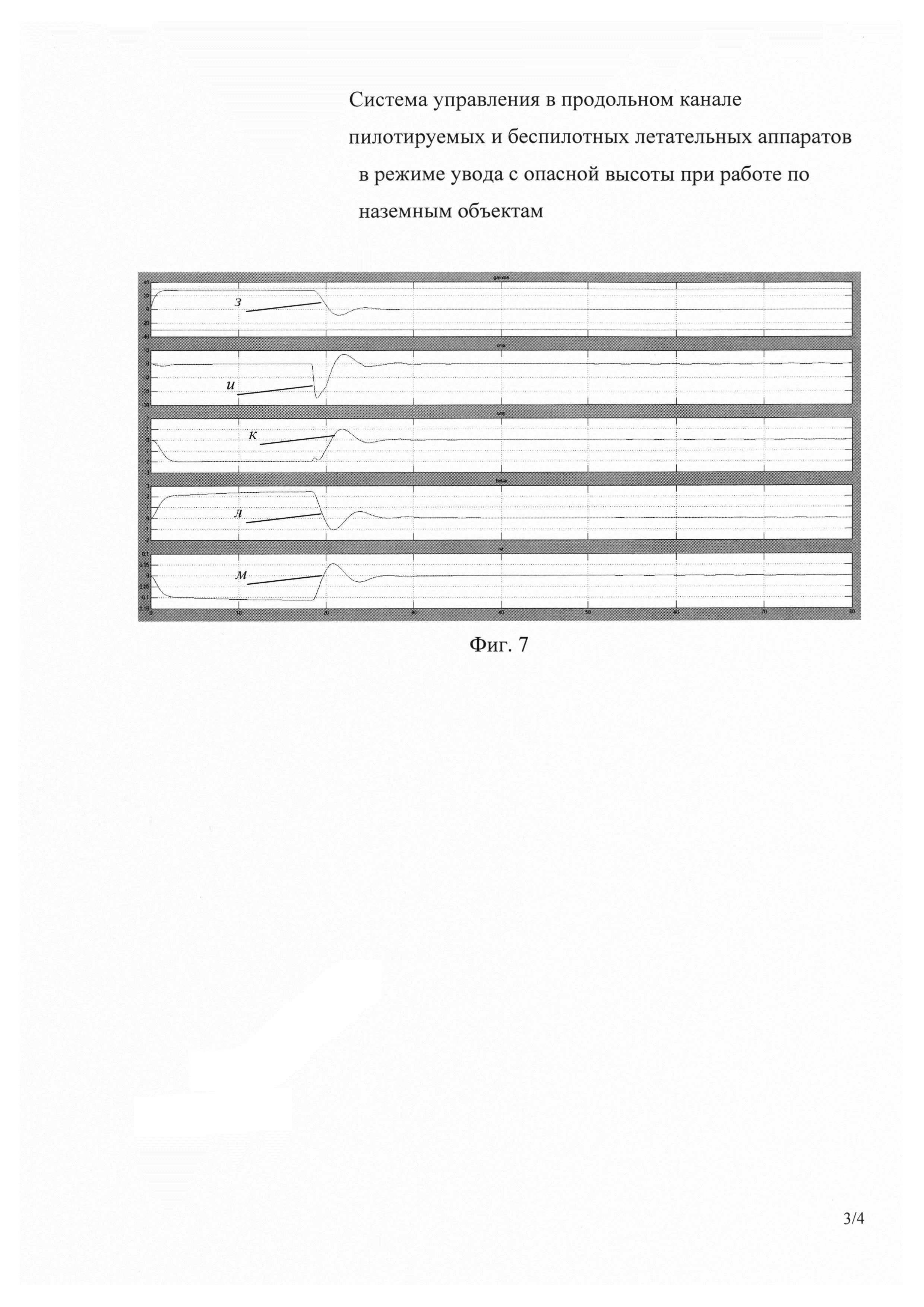
На фигуре 7 - показаны результаты моделирования работы модальной системы в боковом канале в режиме увода с опасной высоты.
На фигуре 7, з изображен: gamma - угол крена с БИНС как функция времени, в сек;
на фигуре 7, и изображена: оmx - угловая скорость крена с датчика угловых скоростей (БИНС) как функция времени, в сек;
на фигуре 7, к изображена: оту - угловая скорость рысканья с датчика угловых скоростей (БИНС) как функция времени, в сек;
на фигуре 7, л изображен: beta - угол скольжения с датчика аэродинамических углов как функция времени, в сек;
на фигуре 7, м изображена: nz - боковая перегрузка как функция времени, в сек.
Полученные данные моделирования подтверждают возможность реализации изобретения с заявленным техническим результатом.
Источники информации
1. Патент России №2262746, кл. МПК G08G 5/04, заявл. 10.06.2004 г., опубл. 20.10.2005 г.
2. Патент России №2271039, кл. МПК G08G 5/04, B64D 45/04, заявл. 24.03.2005 г., опубл. 27.02.2006 г.
3. Патент России №3376645, кл. МПК G08G 5/04, заявл. 29.12.2008, опубл. 2012.2009.
4. Патент России №2388058, кл. МПК G08G 5/04, заявл. 12.06.2006, опубл. 27.07.2009.
5. Shomber H., Gertsen W. - Longitudinal Handing Qualities Griteria: an Evaluation. AIAA Paper, N65-780, 1965 y.


Способ изготовления трехмерного электронного модуля
Сверхширокополосная активная антенная решетка с электрическим сканированием
Способ трассового сопровождения воздушных маневрирующих источников радиоизлучения по пеленговой информации от однопозиционной системы радиотехнической разведки воздушного базирования
Способ управления летательными аппаратами по курсу в угломерной двухпозиционной радиолокационной системе
Способ траекторного управления беспилотным летательным аппаратом для облета городской застройки в вертикальной плоскости
Наземный пункт управления робототехническими комплексами
Способ нелинейного управления инерционным приводом антенны, обеспечивающий высокую устойчивость сопровождения интенсивно маневрирующих объектов
Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов
Способ автоматического группового целераспределения истребителей с учетом возможного выбывания участников
Адаптивный способ пространственного отождествления пеленгов с наземными источниками радиоизлучения и система для его реализации
Блокинг-генератор для работы в ждущем режиме

