Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ СО МНОЖЕСТВОМ ДАТЧИКОВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе, использующим множество датчиков для измерения той же самой физической величины.
Уровень техники
Когда набор датчиков является доступным для измерения той же самой физической величины, то для того чтобы определять, какое измерение является наилучшим среди выполненных измерений, поступающих от различных датчиков, общей практикой является подтверждать правильность измерений главным образом на основе логики, опирающейся на голосование, в которой измерения сравниваются между собой.
Недостаток технологий на основе голосования заключается в том факте, что они нуждаются в адаптации на основе рассмотрения каждого случая в отдельности, в зависимости от количества доступных измерений и как функция типа измерения, о котором идет речь. В процессе создания доступного управляющего программного обеспечения необходимо выполнять единичные тесты каждой из этих функций. Это подразумевает относительно высокие квалификационные затраты и вносит риски, связанные с разнородностью функций.
Раскрытие изобретения
Задача настоящего изобретения состоит в устранении вышеупомянутых недостатков, и если более точно - в выполнении синтеза данных, приходящих от датчиков любого вида и представляющих одну и ту же физическую величину, для того чтобы оценивать наилучшее возможное измерение, в то же время отвергая смещения, которые могут быть представлены в определенных датчиках, в частности вследствие шума, скачкообразного изменения средней величины, или присутствия неисправных датчиков.
Таким образом, задача изобретения состоит в том, чтобы позволить применение единственной оценивающей процедуры независимо от типов датчика и независимо от количества датчиков.
Эти задачи достигаются с помощью измерительной системы, имеющей множество датчиков для измерения одной и той же физической величины, при этом система характеризуется тем, что она содержит, по меньшей мере, один набор n избыточных датчиков или моделей, представляющих вышеуказанную одну и ту же физическую величину, для того чтобы доставлять n измерительных сигналов, интегрирующий модуль для объединения n измерительных сигналов, чтобы доставлять единый объединенный выходной сигнал, составленный из n измерительных сигналов, и восстановленный фильтр Калмана (UKF) без запаха, принимающий вышеуказанный объединенный выходной сигнал, сконфигурированный таким образом, чтобы выводить сигнал, составляющий наилучшую оценку измерения вышеуказанной физической величины, после отклонения сигналов, представляющих неисправный датчик.
Таким образом, система изобретения дает возможность интегрировать данные, приходящие от различных датчиков, а затем обрабатывать эти данные, чтобы оценивать подходящее измерение, которое было очищено от какой-либо ошибки. Это выполняется с помощью простого объединения данных, за которым следует передача единственного выходного сигнала, представляющего интегрирование измерительных сигналов, передаваемых датчиками к восстановленному фильтру Калмана (UKF) без запаха, для определения наилучшей возможной оценки, и таким образом обеспечивать измерение, которое свободно от влияния ошибки.
В отдельном варианте осуществления изобретения интегрирующий модуль содержит счетчик для подсчета количества n вышеуказанных датчиков, набор n модулей функции преобразования, используемых для преобразования электрической величины в физическую величину, причем модули соответственно взаимодействуют с каждым из n датчиков и адаптируются для сохранения информации от вышеуказанных n измерительных сигналов, набор из n блокирующих модулей нулевого порядка и блок мультиплексора, адаптированный для последовательного выбора отдельных измерительных сигналов от различных датчиков и доставки единственного потока данных на вход восстановленного фильтра Калмана (UKF) без запаха, при этом единственный поток данных содержит всю информацию от n измерительных сигналов.
В соответствии с предпочтительной характеристикой, восстановленный фильтр Калмана (UKF) без запаха производит обработку данных со скоростью, которая не меньше, чем скорость интегрирующего модуля, содержащего в себе вышеуказанный блок мультиплексора.
В отдельном варианте осуществления изобретения восстановленный фильтр Калмана (UKF) без запаха включает в себя нелинейный фильтрующий модуль, представляющий динамику изменений на выходе из блока мультиплексора.
В таких обстоятельствах в отдельном аспекте изобретения восстановленный UKF включает в себя тестовый модуль, адаптированный для определения для каждого шага блока мультиплексора, соответствует или нет информация измерительного сигнала значению, которое меньше или равно прогнозируемому значению фильтрующего модуля за вычетом допустимой амплитуды изменения, или значению, которое больше, чем вышеуказанное прогнозируемое значение плюс допустимая амплитуда изменения, и в случае соответствия этим условиям вызвать возвращение информации измерительного сигнала в исходное положение относительно прогнозируемого значения, а в противном случае вызвать возвращение в исходное положение относительно вышеуказанной информации измерительного сигнала и позволить обновление восстановленного UKF.
Изобретение также обеспечивает способ измерения одной и той же физической величины, использующий набор n избыточных датчиков или моделей, представляющих вышеуказанную одну и ту же физическую величину, доставляемую с помощью n измерительных сигналов, при этом способ характеризуется тем, что он содержит, по меньшей мере, шаги, состоящие в объединении n измерительных сигналов, для того чтобы доставить единственный объединенный выходной сигнал, интегрирующий n измерительных сигналов, и в фильтровании вышеуказанного объединенного выходного сигнала восстановленным фильтром Калмана (UKF) без запаха, чтобы вывести сигнал, содержащий наилучшую оценку измерения вышеуказанной физической величины после того, как отвергаются сигналы, представляющие неисправный датчик.
В соответствии с отдельной характеристикой, шаг фильтрования восстановленного фильтра Калмана (UKF) без запаха выполняется со скоростью обработки не меньшей, чем во время объединительного шага.
Предпочтительно, шаг фильтрования восстановленного UKF включает в себя нелинейное фильтрование, представляющее динамику изменения в выходе переключающей операции при выводе объединительного шага.
В соответствии с предпочтительной характеристикой, шаг фильтрования восстановленного UKF включает в себя тест для определения на каждом этапе переключающей операции, соответствует или нет информация измерительного сигнала значению, которое меньше или равно прогнозируемому значению фильтрующего шага за вычетом допустимой амплитуды изменения или значению, которое больше, чем вышеуказанное прогнозируемое значение плюс допустимая амплитуда изменения, и в случае соответствия этим условиям вызвать возвращение информации измерительного сигнала в исходное положение относительно прогнозируемого значения, а в противном случае вызвать возвращение в исходное положение относительно вышеуказанной информации измерительного сигнала и позволить обновление фильтрующего шага восстановленного UKF.
Краткое описание чертежей
Другие характеристики и преимущества изобретения будут понятны из последующего описания отдельных вариантов осуществления изобретения, представленных в неограничивающих примерах и со ссылками на прилагаемые чертежи, в которых:
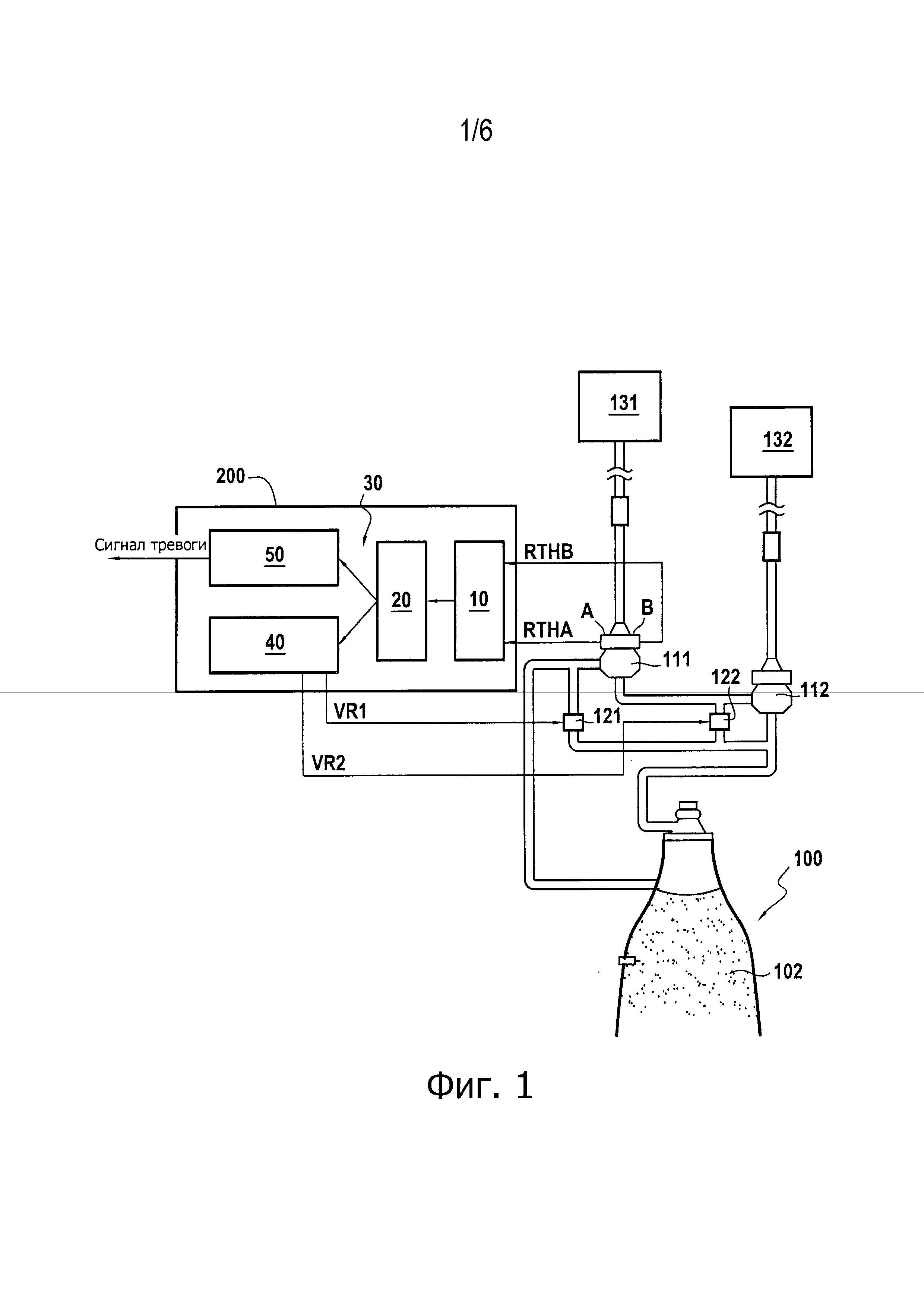
фиг. 1 является видом в виде диаграммы ракетного двигателя и его системы управления;
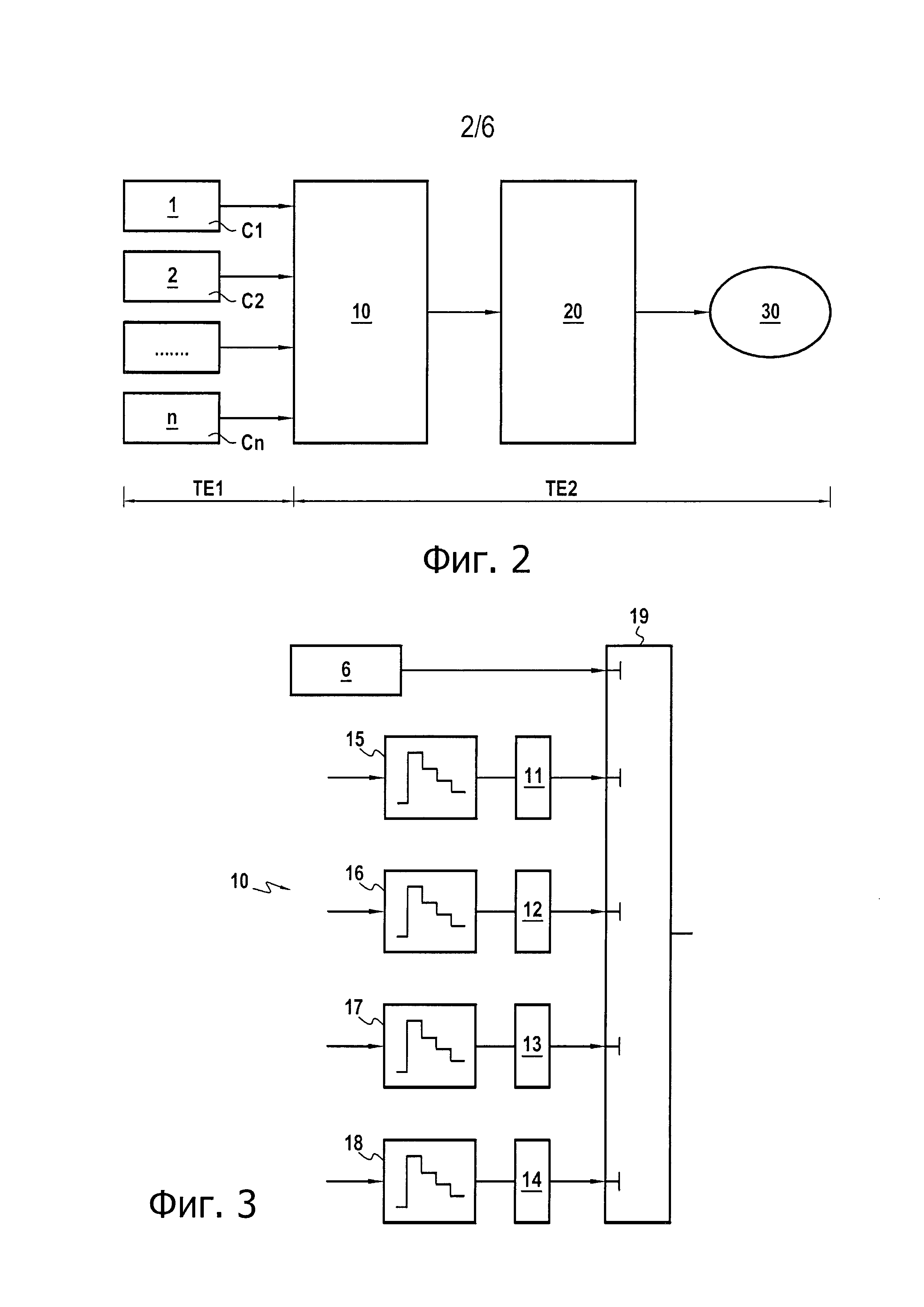
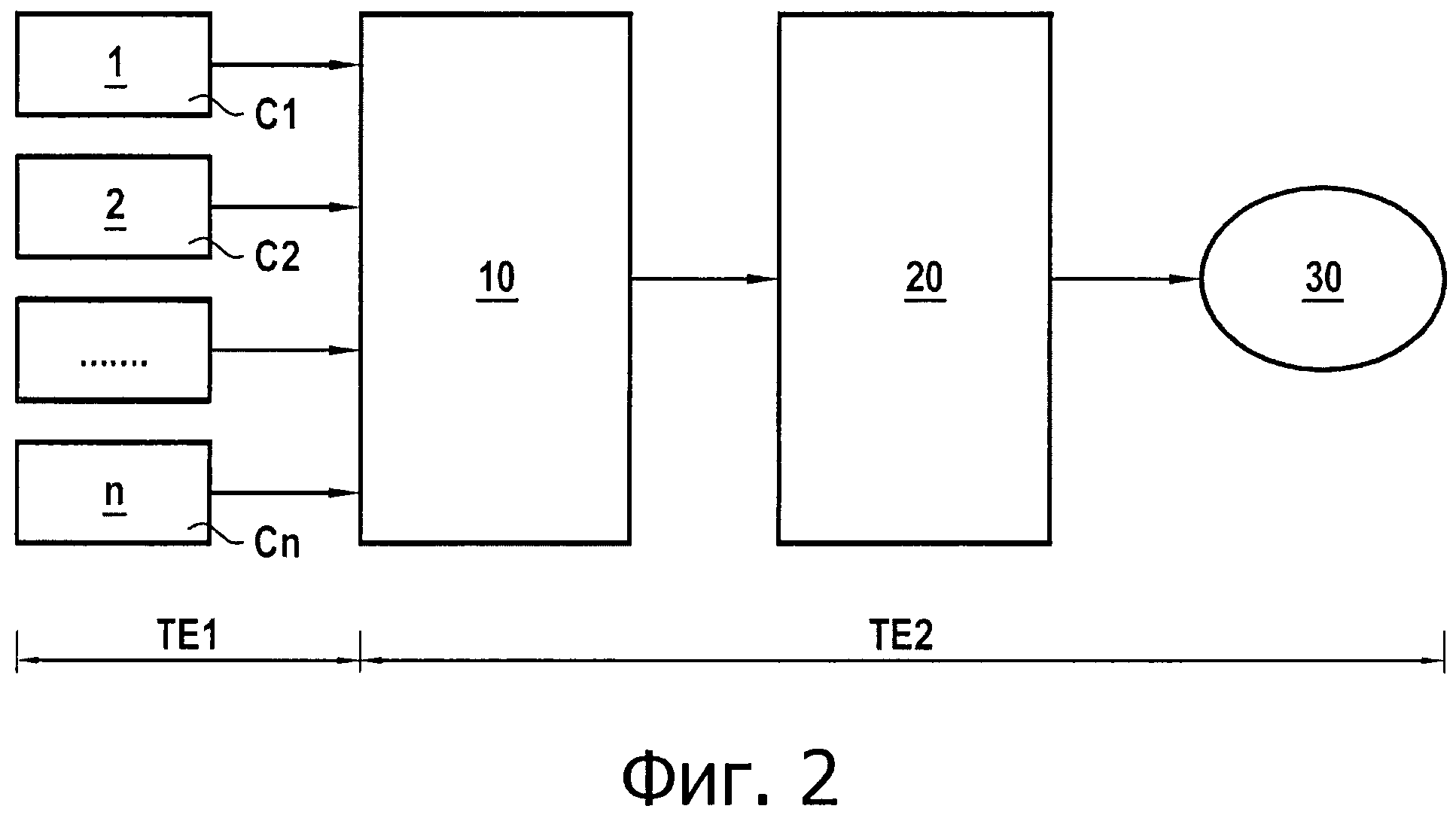
фиг. 2 является блок-схемой модулей, включающих в себя компоненты программного обеспечения, применяемые в системе или в измерительном способе изобретения;
фиг. 3 является более подробным видом интегрирующего модуля, включающего в себя блок мультиплексора, подходящего для встраивания в измерительную систему, показанную на фиг. 2;
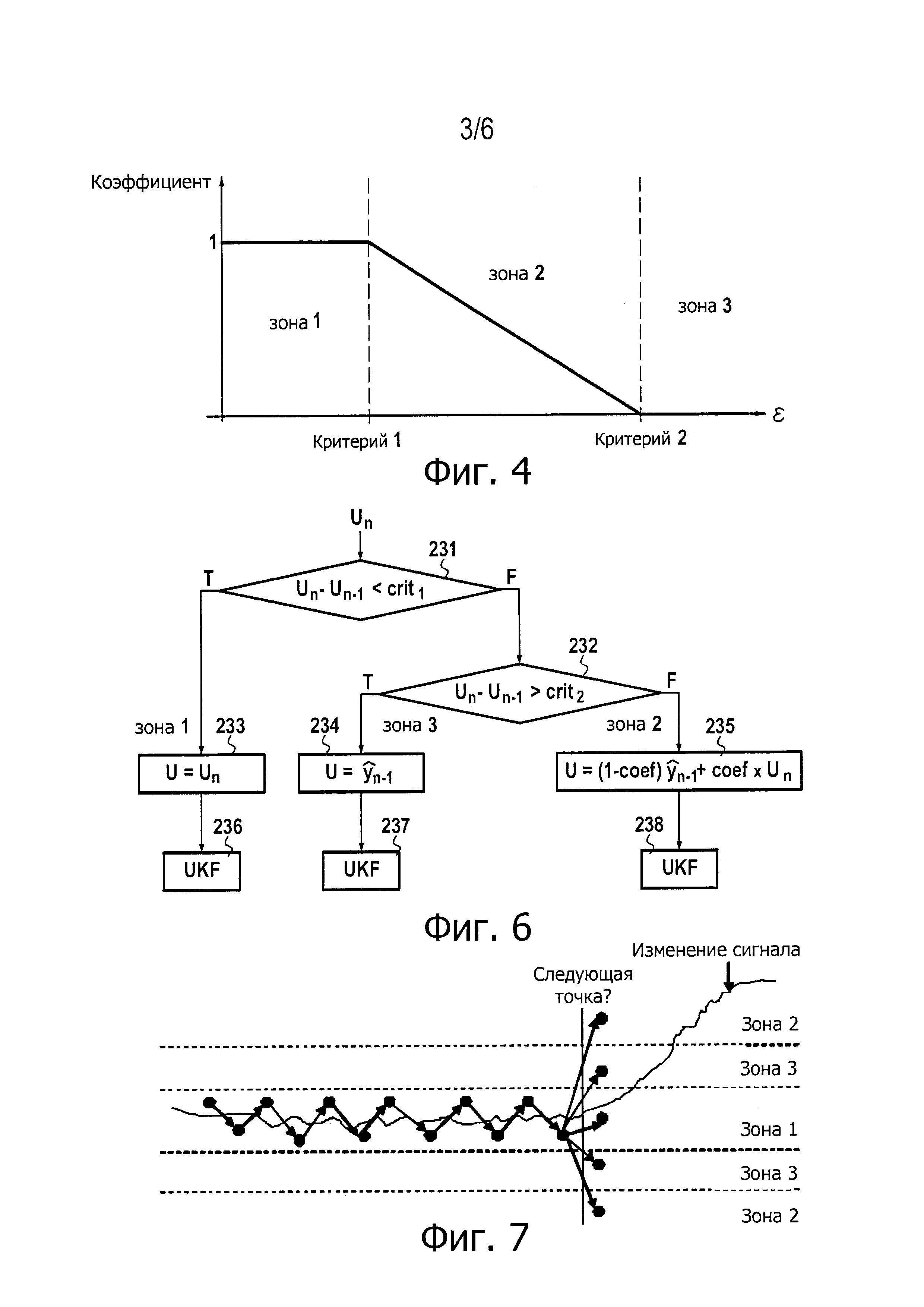
фиг. 4 является графиком, показывающим соотношение для вычисления параметра Coeff, используемого на фиг. 6, в то же время оценивающим измерительные сигналы;
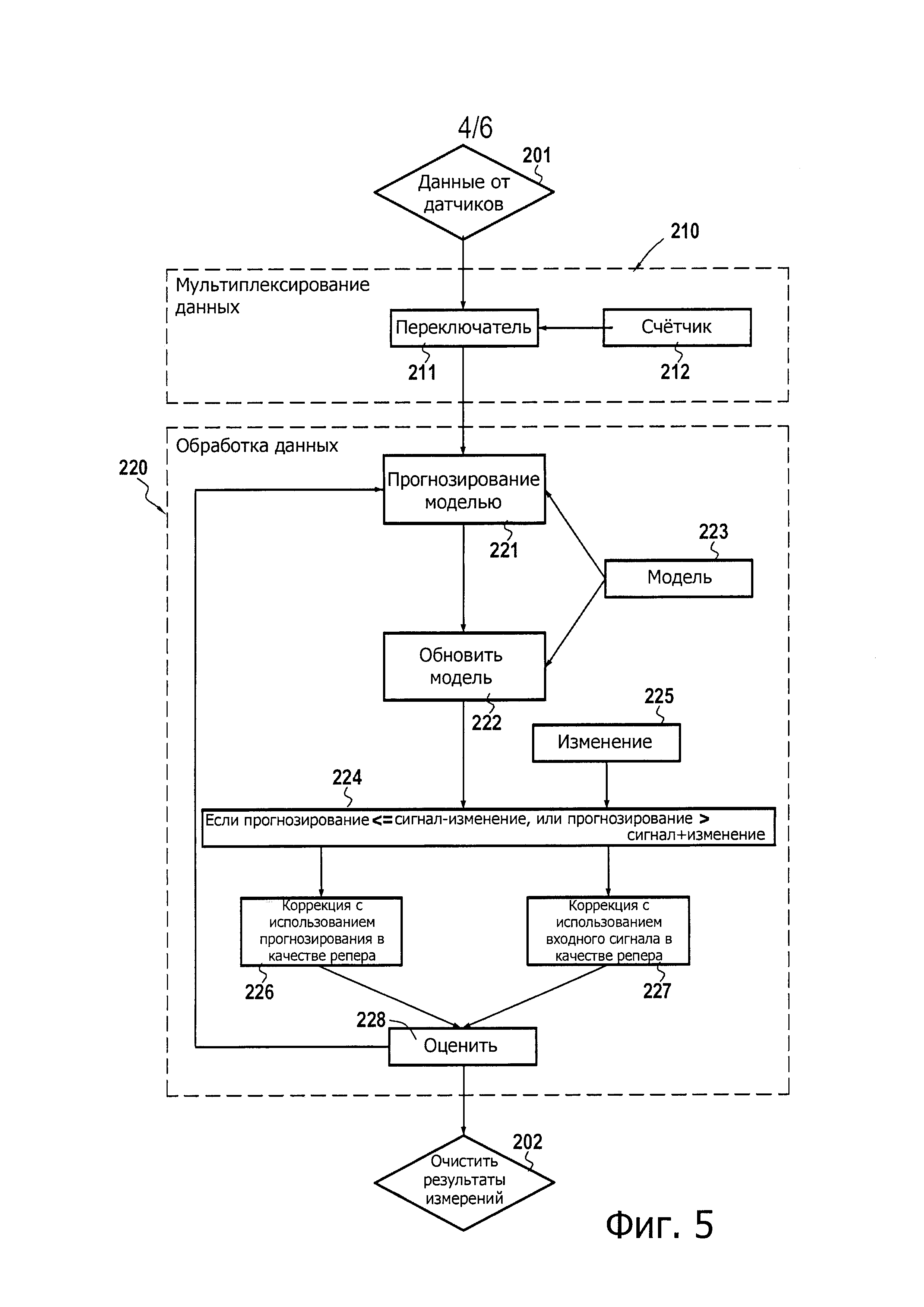
фиг. 5 является картой последовательности процесса, суммирующей шаги объединения данных и обработки данных в измерительном способе изобретения, во время которого обнаруживаются и корректируются возможные аномалии в измерительных сигналах;
фиг. 6 является картой последовательности процесса, представляющей диаграмму переходов для взвешивания сигналов, в зависимости от расстояния между последовательными образцами n и n-1;
фиг. 7 является графиком, показывающим процесс изменения окон допустимого отклонения;
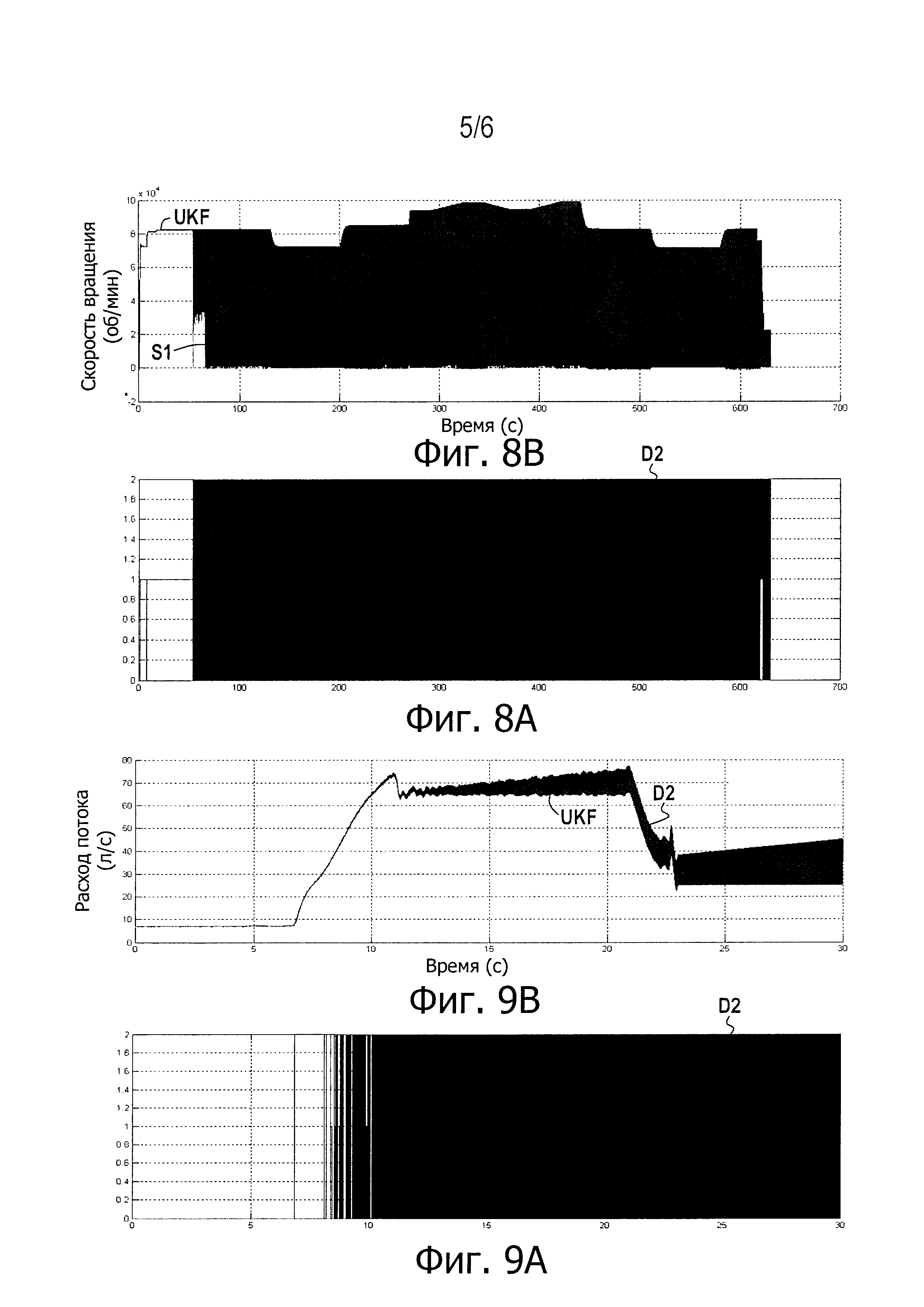
фиг. 8А показывает первый пример результатов обнаружения флага;
фиг. 8В показывает для этого первого примера результатов обнаружения флага необработанные объединенные сигналы вместе с отфильтрованным выходным сигналом;
фиг. 9А показывает второй пример результатов обнаружения флага;
фиг. 9В показывает для этого второго примера результатов обнаружения флага необработанные объединенные сигналы и отфильтрованный выходной сигнал;
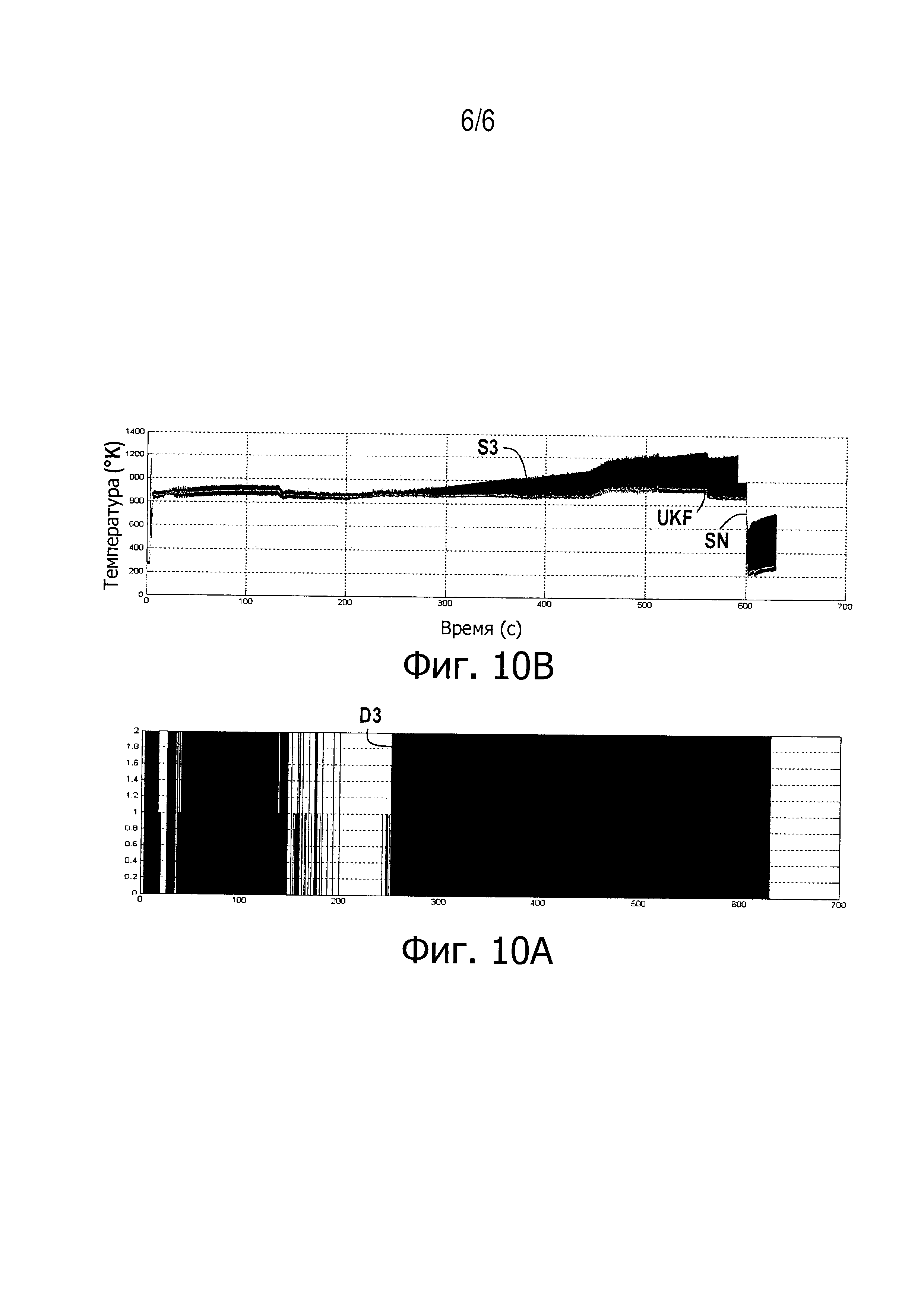
фиг. 10А показывает третий пример результатов обнаружения флага; и
фиг. 10В показывает для этого третьего примера результатов обнаружения флага необработанный объединенный сигнал вместе с отфильтрованным выходным сигналом.
Осуществление изобретения
Фиг. 1 показывает ракетный двигатель 100, содержащий сопло 102, получающее питание из двух баков 131 и 132 для ракетного топлива, каждый из которых располагается выше по ходу потока от насосов 111, 112.
Расход потока каждого ракетного топлива может контролироваться клапанами 121, 122, расположенными между насосами 111, 112 и соплом 102.
Расход потока каждого ракетного топлива измеряется непосредственно сразу выше по ходу потока от каждого из насосов 111, 112.
В описываемом примере применения для упрощения разъяснений объединяются только два измерения, однако количество объединяемых измерений может быть намного больше чем два.
Датчики А и В располагаются на насосе 111 и они измеряют скорость его вращения. Эти датчики обеспечивают два взаимно независимых измерения RTHA и RTHB, представляющие скорость насоса 111.
Двигатель 100 включает в себя контроллер 200, который составлен из блока 40 регулятора и блока 50 монитора. Блоки 40 и 50 принимают информацию, которая была объединена модулем 20 измерительного фильтра.
Фильтрующий модуль 20 принимает информацию RTHA и RTHB в виде обусловленной и объединенной информации интегрирующим модулем 10.
За счет использования информации, которая уже объединена с помощью шагов, выполненных интегрирующим модулем 10, а затем фильтрующим модулем 20, регулятор 40 находится в положении для регулирования работы двигателя 100 за счет пересылки заданных значений VR1 и VR2 регулируемой величины для открывания/закрывания клапанов 121,122, питающих двигатель 100. Аналогичным образом монитор 50 находится в таком положении, чтобы выдавать сигнал тревоги надежным способом в отношении чрезмерной скорости вращения насоса 111.
Принцип изобретения иллюстрируется блок-схемой, показанной на фиг. 2.
Система изобретения содержит набор n избыточных датчиков C1, С2,…,Cn или моделей, причем все они представляют одну и ту же физическую величину. Например, чертежи показывают набор четырех датчиков с С1 по Cn, однако количество n могло быть любым другим целым числом, отличающимся от четырех.
В отношении фазы, во время которой запрашиваются данные, доставляемые к n датчикам с С1 по Cn, существует время ТЕ1 выборки, равное N миллисекундам.
Система изобретения имеет первый интегрирующий модуль 10, содержащий в себе объединяющую функцию 19 для объединения данных, приходящих от датчиков с С1 по Cn, после предварительного преобразования в физические величины за счет функций преобразования модулей с 11 по 14 (фиг. 3), для того чтобы вывести единственное измерение, содержащее все предшествующие измерения, включающие в себя ошибки и данные, обеспечиваемые датчиками, которые являются бездействующими.
Выход из интегрирующего модуля 10 присоединяется к входу фильтрующего модуля 20, содержащего восстановленный так называемый фильтр Калмана (UKF) без запаха, чтобы дать возможность оценить наилучшее измерение из всех измерений датчиков, отвергая аномальные значения с помощью специальной перенастройки. Полученный таким образом сигнал 30 на выходе из фильтрующего модуля 20 содержит наилучшую оценку измерения.
Обработка в модулях 10 и 20 соответствует времени ТЕ2 выборки, равному ТЕ1, поделенному на количество n датчиков.
Фиг. 3 показывает вариант осуществления изобретения интегрирующего модуля 10.
В этом примере интегрирующий модуль 10 имеет счетчик 6 для подсчета количества n датчиков с С1 по Cn, набор n модулей с 11 по 14, выполняющих функции преобразования, соответственно взаимодействующих с каждым из n датчиков с С1 по Cn и адаптированных для записи информации n измерительных сигналов, и набор из n блокирующих модулей с 15 по 18 нулевого порядка. Кроме того, в интегрирующем модуле 10 блок 19 мультиплексора адаптируется для последовательного выбора индивидуальных измерительных сигналов от различных датчиков с С1 по Cn и доставки их к входу восстановленного UKF 20 как единственного потока данных, содержащего всю информацию из n измерительных сигналов.
Блок 19 мультиплексора синхронизируется с использованием времени ТЕ2 выборки, которое соответствует времени ТЕ1 поиска для выборки различных датчиков с С1 по Cn, поделенное на количество n датчиков.
Таким образом, блок 19 мультиплексора служит для последовательного выбора измерений от различных датчиков C1, С2,…, Cn и получения единственного потока
данных, вмещающего все измерения. Чтобы последовательно выбирать измерения, можно использовать простой счетчик 6, который запускается с 1 и считает до количества представленных датчиков. Эта операция повторяется на протяжении всего процесса оценки.
Далее следует описание варианта осуществления изобретения фильтрующего модуля 20, показанного на фиг. 2, который действует как восстановленный фильтр Калмана (UKF) без запаха.
В первую очередь следует обратить внимание, что информация о восстановленных фильтрах Калмана (UKF) без запаха может быть найдена в главе 7, озаглавленной «Малочувствительный фильтр Калмана» авторов Эрик Ван и Рудольф ван дер Мерве (Eric Wan и Rudolph van der Merwe), содержащейся в работе, озаглавленной «Фильтрующие и нейронные сети Калмана», опубликованной Симоном Хайкин (Simon Haykin) из компании John Wiley & Sons, Inc., в 2001 г.
Фильтрующий модуль 20, составленный восстановленным фильтром Калмана (UKF) без запаха, служит для оценки физической величины, измеренной датчиками с С1 по Cn, за счет того, что отвергаются аномалии такого типа, как шум или смещение с помощью специальной перенастройки. Кроме того, естественный шум, являющийся результатом объединения измерений датчиков, может быть уменьшен с помощью специального фильтра, вставляемого в фильтрующий модуль 20.
В фильтрующем модуле 20 UKF используется с фильтром, представляющим возможный динамический диапазон изменения в физической системе, в которой производится измерение. Этот фильтр является нелинейным, поскольку он включает в себя представительные насыщения изменения скорости для достоверности изменения в измерительном сигнале фильтруемого датчика. Тем не менее, должны быть отвергнуты значения, которые выглядят как выбросы (смещение, неработающий датчик, и т.п.). Единый поток на входе фильтрующего модуля 20 содержит как полезную информацию, которая является несмещенной, так и информацию от смещенных датчиков, в частности один раз за каждые N шагов переключающего модуля 19, если смещение представлено только на одном из датчиков. В этой ситуации код для традиционного фильтра Калмана без запаха включает в себя дополнительное условие, которое создает возможность для выборочной перенастройки следующим образом:
- или рассматривается, что входной сигнал является недопустимым (внутри вариационной маржи) и он отвергается за счет использования шага отклонения UKF (модуль 221), чтобы заменить входной сигнал во время шага перенастройки UKF (модуль 222). В этом случае прогнозирование является представительным для вставленной модели и само рассматривается как хорошее и неповреждаемое смещением;
- или дополнительно оно рассматривается таким образом, что входной сигнал является хорошим, в этом случае перенастройка выполняется нормально с использованием входного сигнала и шага обновления UKF.
Код для дополнительного условия, добавленный к концу кода UKF, может резюмироваться следующим образом:
IF (input_signal< = prediction - variation, т.е. входной сигнал < = прогнозирование - изменение) (тест 224)
OR (input_signal > prediction + variation, входной сигнал > прогнозирование + изменение) (тест 224)
THEN возврат в исходное положение по отношению к прогнозированию фильтра (модуль 226)
ELSE возврат в исходное положение по отношению к входному сигналу (модуль 227)
END
Решение для обнаружения и корректировки аномалий показано на карте последовательности процесса фиг. 5.
Модуль 210, являющийся мультиплексором данных, имеет переключатель 211, взаимодействующий со счетчиком 212, и принимает данные датчика, обеспечиваемые во время шага 201.
Модуль 220, являющийся процессором для обработки данных, имеет модуль 223, определяющий модель, модуль 221 для прогнозирования, использующий модель, который принимает данные от датчиков через переключатель 211, и модуль 222 для обновления за счет использования модели, который принимает данные от модуля 223 и от модуля 221.
Процессор 220 для обработки данных также имеет модуль 225, в котором сохраняется изменение сигнала и тест 224, в соответствии с чем:
1) если прогнозирование, определенное в модуле 221 и обновленное моделью, меньше или равно сигналу минус изменение; или
2) если прогнозирование, определенное в модуле 221 и обновленное моделью, больше или равно сигналу плюс изменение;
в таком случае перенастройка выполняется в модуле 226, используя прогнозирование в качестве образца; в противном случае
перенастройка выполняется в модуле 227, используя входной сигнал в качестве образца.
Выход из модуля 226 или из модуля 227 содержит блок 228 для сохранения оцененного значения, которое отсылается к модулю 221 для прогнозирования на основе модели и используется в качестве выхода для блока 202 с целью обеспечения чистого измерения.
Второе решение, показанное на карте последовательности процесса фиг. 6, состоит в использовании оценочной способности фильтра Калмана (UKF) без запаха и в комбинировании этой способности с алгоритмом, основанным на взвешивании, во взаимодействии с наборами однотипных сигналов неопределенностей, для того чтобы информировать фильтр о выпадающем или невыпадающем характере сигнала в текущий момент времени.
Различные области допустимых значений оцениваются с использованием уровня допустимого шума или его изменения между двумя последовательными точками сбора данных.
Фиг. 4 показывает, каким образом изменяется коэффициент как функция от значения "epsilon", которое представляет разницу между значением сигнала в текущий момент времени и его значением в предшествующий момент времени.
Фиг. 4 показывает три различных ситуации, определяющие три зоны диаграммы:
- зона 1: это зона, в которой точка, как предполагается, должна быть «правильной» (коэффициент равен 1);
- зона 2: «приграничная» зона (после критерия 1, коэффициент уменьшается до 0);
и
- зона 3: это зона, в которой точка рассматривается как выпадающая величина (после критерия 2, коэффициент равен 0).
Способ, по которому точка принимается во внимание, основывается на ее положении в статистическом окне с взвешиванием, используя следующую формулу:

Этот принцип показан с помощью диаграммы переходов на фиг. 6.
Принцип заключается в следующем: значение Un текущего сигнала (текущий момент времени "n") сравнивается с его значением Un-1 в предшествующий момент (n-1) времени по отношению к первому критерию crit1 (шаг 231):
- если результат меньше, чем критерий 1, тогда текущий сигнал принимается во внимание для последующей оценки (момент "n+1" времени). Это соответствует зоне №1, а весовой коэффициент составляет 1 (шаги 233, затем 236 для фильтра Калмана (UKF) без запаха);
- если результат больше, чем критерий 1, тогда тестируется критерий 2 (шаг 232), для того чтобы определить, является ли разница Un- Un-1 большей, чем второй критерий crit2. Если результат больше, чем crit2, тогда предшествующая оценка является оценкой, которая принимается во внимание для вычисления последующей оценки. Это соответствует зоне №3, а весовой коэффициент составляет 0 (шаги 234, за которыми следует шаг 237 для фильтра Калмана (UKF) без запаха);
Текущая и предшествующая оценки.
Это лежит в зоне №2 (шаг 235), а весовой коэффициент изменяется в применении соотношения прямой линии, представленного следующей формулой:
Ниже определяется, как определяются критерии 1 и 2:
критерий 1 представляет желаемую теоретическую допустимую неопределенность и является предопределенным атрибутом:

при этом:
- margin (допустимый предел) = 3 (safety margin, коэффициент безопасности), представляющий 99,7% вероятности;
σ1 и σ2 являются стандартными отклонениями на последовательных датчиках 1 и 2;
- существуют две возможности: или стандартные отклонения точно известны, и в этом случае достаточно ввести известные значения, или в противном случае они не известны, и тогда возможно использовать способность фильтра Калмана (UKF) без запаха оценивать несоответствие (и таким образом, стандартное отклонение).
Следует иметь в виду, что критерий 1 охватывает смещение, а также шум, накладываемые на два последовательных датчика.
Критерий 2 включает в себя потенциал и допустимую скорость отклонения сигнала (заданные характером контролируемой системы, ее собственной скоростью изменения, главным образом определяемую скоростью, с которой могут переключаться различные клапаны), и, следовательно, включает в себя «возможное» изменение для рабочей точки системы:

где:
σspeed: преобразование скорости, которое является неизменяемым соотношением, в нормальное соотношение, для того чтобы можно было добавлять его к ранее оцененной фильтром Калмана (UKF) без запаха неопределенности. Преобразование скорости в нормальное соотношение выполняется следующим образом:
Процесс, в соответствии с которым изменяются окна допустимых отклонений, показан на фиг. 7. В этом процессе можно увидеть три различные зоны для ситуации с последовательным измерением точек.
Флаг обнаружения показывает зону, в которой находится система:
- флаг при 0: смещение не обнаружено, оценка выполняется на основе текущего сигнала;
- флаг при 1: было обнаружено промежуточное смещение, оценка выполняется на основе взвешивания; и
- флаг при 2: было обнаружено чрезмерное смещение, оценка выполняется на основе предыдущей оценки.
Также можно наблюдать, что алгоритм, соответствующий скоростному насыщению, не является полезным в этой ситуации. Нелинейность модели сейчас обеспечивается за счет переменной «epsilon» и испытаний на критериях 1 и 2.
Фиг. 8А показывает пример обнаружения флага D1 для системы, измеряющей скорость вращения турбонасоса, подающего жидкий водород к ракетному двигателю.
Фиг. 8В показывает форму сигнала S1 и выход фильтра Калмана (UKF) без запаха для примера измерительной системы, соответствующей фиг. 1.
Фиг. 9А показывает пример обнаружения флага D2 для системы, измеряющей скорость потока турбонасоса, подающего жидкий водород к ракетному двигателю.
Фиг. 9В показывает форму реального сигнала S2 и выход фильтра Калмана (UKF) без запаха.
Фиг. 10А показывает пример обнаружения флага D3 для системы, измеряющей температуру внутри ракетного двигателя.
Фиг. 10В показывает форму реального сигнала S3 на выходе фильтра Калмана (UKF) без запаха, и номинальный сигнал SN.
Подводя итог, можно подчеркнуть, что система изобретения отличается, в частности, использованием блока 19 мультиплексора, позволяющего производить измерения, приходящие от датчиков с С1 по Cn, выполняемых последовательно, и позволяющего рассматривать входной сигнал к фильтрующему модулю 20 как сигнал, доставляющий только один элемент информации.
Изобретение также характеризуется использованием нелинейной модели в качестве модели измеряемого изменения.
Способ и система изобретения также замечательны тем, что обусловленная перенастройка выполняется таким образом, что она включается в состав кода фильтра Калмана (UKF) без запаха, для того чтобы позволить отвергать выпадающие значения и таким образом получать лучшую оценку измерения от всех датчиков с С1 по Cn.
Различные модули измерительной системы, показанной на фиг. 2 и 3, и шаги измерительного способа, определяемые со ссылками на фиг. 5 и 6, могут быть выполнены с использованием компьютера, имеющего один или более процессоров, вместе с модулями памяти.
Устройство капотирования мотогондолы блока силовой установки летательного аппарата
Устройство контроля насоса высокого давления в контуре питания топливом газотурбинного двигателя
Устройство разъединения опоры подшипника
Способ и система для определения углового положения ротора турбореактивного двигателя
Лопасть для лопастного рабочего колеса турбомашины, участок соплового аппарата турбомашины, рабочее лопастное колесо и турбомашина
Ротор газотурбинного двигателя, турбореактивный двигатель и заглушка для ротора газотурбинного двигателя
Обнаружение аномалий в авиационном двигателе
Способ изготовления детали лопаточного аппарата
Способ изготовления лопатки
Направляющая лопатка вентилятора, выполненная из трехмерного композиционного материала
Датчик для проверки поверхности круговой канавки в диске турбореактивного двигателя с помощью вихревых токов
Устройство капотирования мотогондолы блока силовой установки летательного аппарата
Устройство контроля насоса высокого давления в контуре питания топливом газотурбинного двигателя
Устройство разъединения опоры подшипника
Способ и система для определения углового положения ротора турбореактивного двигателя
Лопасть для лопастного рабочего колеса турбомашины, участок соплового аппарата турбомашины, рабочее лопастное колесо и турбомашина
Ротор газотурбинного двигателя, турбореактивный двигатель и заглушка для ротора газотурбинного двигателя
Обнаружение аномалий в авиационном двигателе
Способ изготовления детали лопаточного аппарата
Способ изготовления лопатки

