Результат интеллектуальной деятельности: ВИРТУАЛЬНЫЕ КАДРЫ ДЛЯ РАСПРЕДЕЛИТЕЛЬНОЙ ВРЕМЯПРОЛЕТНОЙ РЕКОНСТРУКЦИИ ДАННЫХ В РЕЖИМЕ СПИСКА С НЕПРЕРЫВНЫМ ДВИЖЕНИЕМ СТОЛА
Вид РИД
Изобретение
Изобретение относится, в общем, к медицинской визуализации. Настоящее изобретение находит применение, в частности, в связи с позитронно-эмиссионной томографией (ПЭТ), реконструкцией изображений и непрерывным движением стола (CBM) и описано в дальнейшем с отдельной ссылкой на них. Однако будет понятно, что изобретение находит также применение в других сценариях применения и не обязательно ограничено вышеупомянутым применением.
При ПЭТ визуализации решетки детекторов обнаруживают пары гамма-фотонов, испускаемых в результате события позитронной аннигиляции в субъекте. Пары обнаруженных гамма-фотонов определяют линию срабатывания (LOR). Времяпролетная (TOF) ПЭТ добавляет оценку местоположение источника, где произошло событие позитронной аннигиляции, на основании средней разности по времени между обнаружением каждой пары фотонов. Оценка является расстоянием вдоль линии LOR. Обнаруженные совпадающие пары и TOF информация могут быть записаны в список событий, называемый данными в режиме списка. По данным, собранным в режиме списка, реконструируют одно или более изображений.
Последовательность клинических действий включает в себя время сканирования пациента и время реконструкции одного или более изображений. Клиническое время стоит дорого. Последовательность клинических действий может включать в себя визуализацию с помощью одного или более средств визуализации, например, рентгеновской компьютерной томографии (КТ). Один подход к совершенствованию последовательности клинических действий состоит в быстром формировании изображений, при сокращении общего времени сканирования. При визуализации области пациента, которая длиннее, чем область визуализации сканера, для формирования удлиненного изображения применяли метод пошагового сканирования. Опора пациента перемещается в первую позицию, останавливается, и первую область пациента визуализируют. После визуализации первой области опору перемещают во вторую позицию, останавливают и вторую область визуализируют и так далее. При равномерной дискретизации, области пациента перекрываются, например, на 50%. Однако время перемещения или шага в следующую позицию продлевает общее время сканирования. Движение во время торможения/разгона неудобно для некоторых субъектов. В мультимодальных или гибридных системах, например ПЭТ-КТ, некоторые средства, например КТ, не извлекают пользу из метода пошагового сканирования, который может фактически задерживать последовательность действий другого средства.
Другим подходом является непрерывное движение стола (CBM). Движение CBM сокращает общее время сканирования, поскольку стол находится в постоянном движении, и данные собираются непрерывно. Время разгона и торможения стола в способе пошагового сканирования исключается. Однако собирается один большой набор данных, и реконструкция изображения откладывается до тех пор, пока не собираются все данные. Например, при реконструкции на основе синограмм удлиненного набора данных, каждая синограмма включает в себя вклады данных с полной длины набора данных. Следовательно, данные нельзя группировать в синограммы, пока не собраны все данные. Таким образом, хотя общее время сбора данных для ПЭТ можно сократить, реконструкция изображения откладывается до окончания, которое использует значительные вычислительные ресурсы. Обычно пациента не освобождают из сканера, пока реконструированное изображение не получено и подтверждено, что создает узкое место в последовательности действий. Кроме того, объединение реконструированных изображений с изображениями из других средств задерживается, что дополняет узкое место вычислительных ресурсов. Сочетание с другими средствами использует такие компоненты визуализации, как карты ослабления.
Ниже раскрываются новые и усовершенствованные виртуальные кадры для распределенной реконструкции данных в режиме списка с непрерывным движением стола, которые решают вышеупомянутые и другие проблемы.
В соответствии с одним аспектом, система позитронно-эмиссионной томографии (ПЭТ) включает в себя память, опору субъекта, группирующий блок и блок реконструкции. Память непрерывно записывает обнаруживаемые совпадающие пары событий, обнаруживаемые ПЭТ-детекторами. Опора субъекта поддерживает субъекта и перемещается в режиме непрерывного движения через поле видения ПЭТ-детекторов. Группирующий блок группирует записанные совпадающие пары в каждый из множества пространственно ограниченных виртуальных кадров. Блок реконструкции реконструирует сгруппированные совпадающие пары каждого виртуального кадра в изображение кадра и объединяет изображения кадров в общее удлиненное изображение.
В соответствии с другим аспектом, способ позитронно-эмиссионной томографии (ПЭТ) включает в себя непрерывное перемещение субъекта на опоре субъекта через поле видения ПЭТ-детекторов, с записью при этом обнаруженных совпадающих пар событий в памяти. Записанные совпадающие пары событий группируются в каждый из множества пространственно ограниченных виртуальных кадров. Сгруппированные совпадающие события каждого виртуального кадра реконструируются в общее удлиненное изображение.
В соответствии с другим аспектом, система времяпролетной (TOF) позитронно-эмиссионной томографии (ПЭТ) включает в себя решетку ПЭТ-детекторов, опору субъекта и один или более процессоров. Решетка ПЭТ-детекторов обнаруживает и записывает совпадающие события в данные в режиме списка. Опора субъекта поддерживает субъекта и перемещается в режиме непрерывного движения через поле видения решетки ПЭТ-детекторов. Один или более процессоров сконфигурированы с возможностью группировки записанных совпадающих пар в смежные виртуальные кадры на основании времяпролетной информации. Один или более процессоров дополнительно сконфигурированы с возможностью реконструкции изображения кадра из каждого виртуального кадра и объединения изображений кадров в непрерывное удлиненное поле видения.
Одно преимущество заключается в повышении комфорта пациента.
Другое преимущество состоит в интегрированной мультимодальной последовательности действий.
Другое преимущество состоит в эффективной параллельной реконструкции с помощью распределенной обработки.
Другое преимущество включает в себя уменьшение задержки сканирования.
Другое преимущество заключается в равномерном аксиальном профиле чувствительности.
Другое преимущество состоит в улучшенных осевой дискретизации и пространственном разрешении.
Другое преимущество включает в себя сбор данных с адаптацией к области интереса.
Другие дополнительные преимущества будут понятны специалистам со средним уровнем компетентности в данной области техники после прочтения и изучения нижеследующего подробного описания.
Изобретение может быть в форме различных компонентов и расположений компонентов и в форме различных этапов и расположения этапов. Чертежи предназначены только в целях иллюстрации предпочтительных вариантов осуществления и не подлежат трактовке как ограничивающие изобретение.
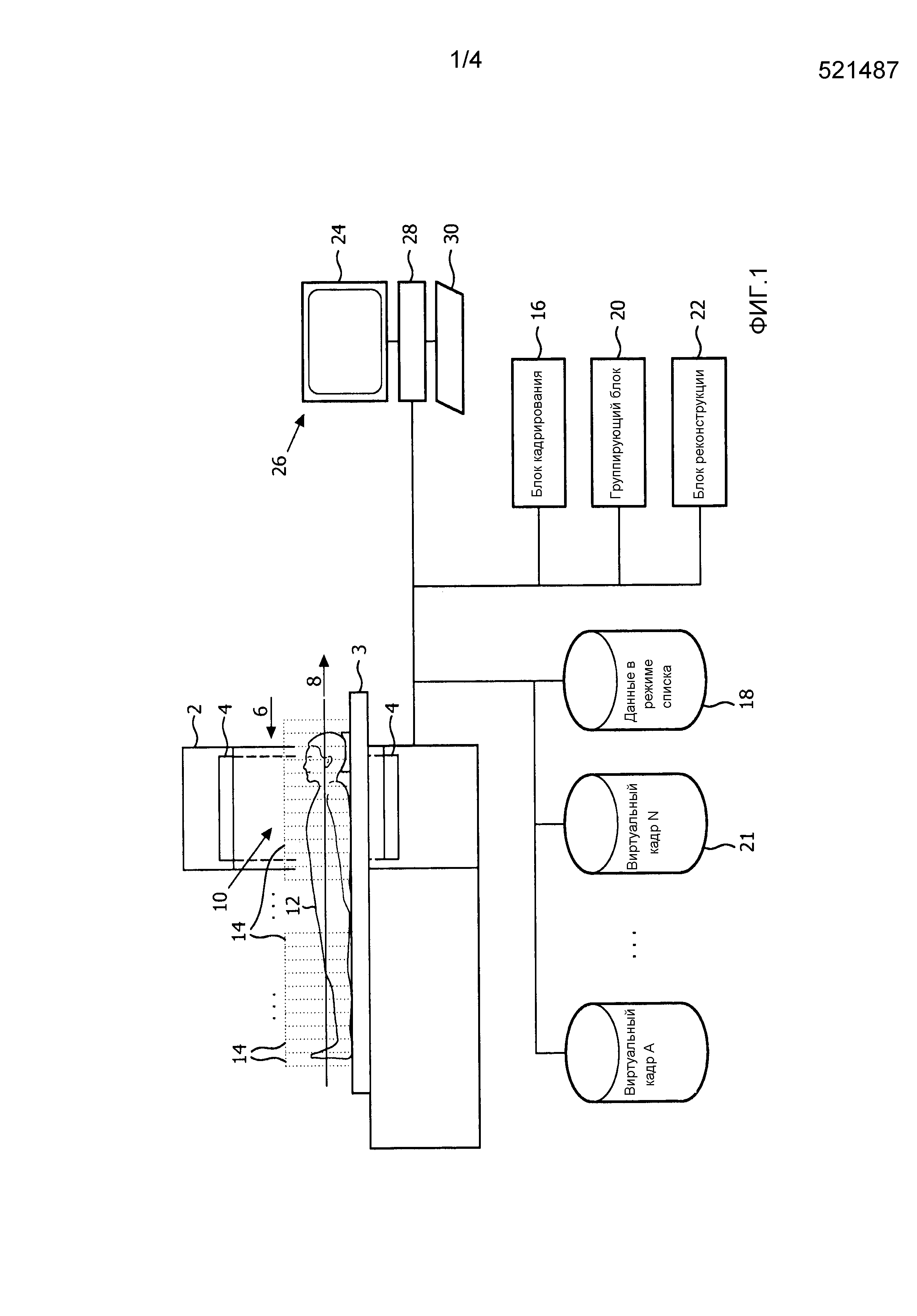
Фигура 1 – схематическое изображение варианта осуществления системы ПЭТ с CBM и виртуальными кадрами.
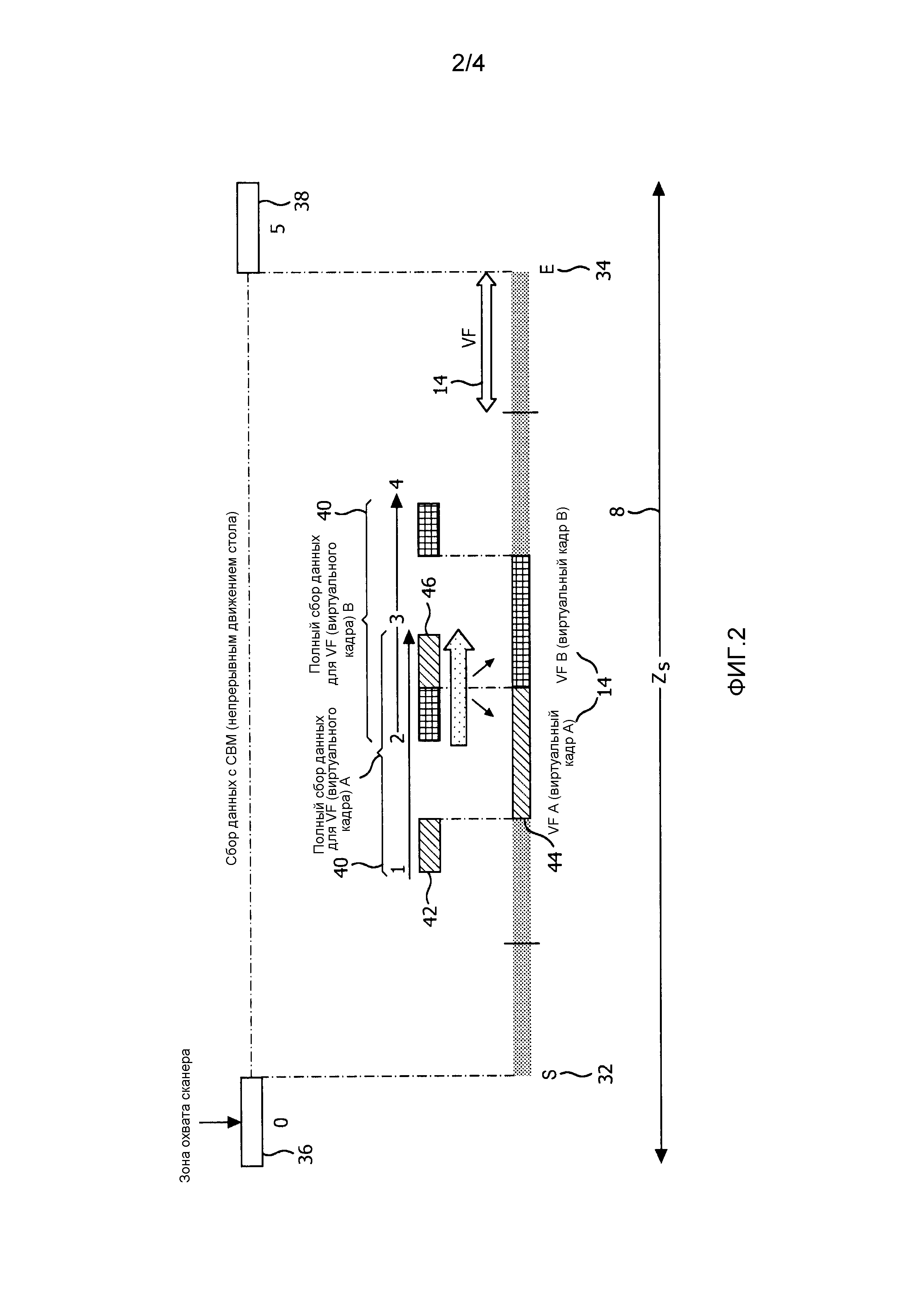
Фигура 2 – схематическое изображение примерного сбора данных с CBM и виртуальными кадрами.
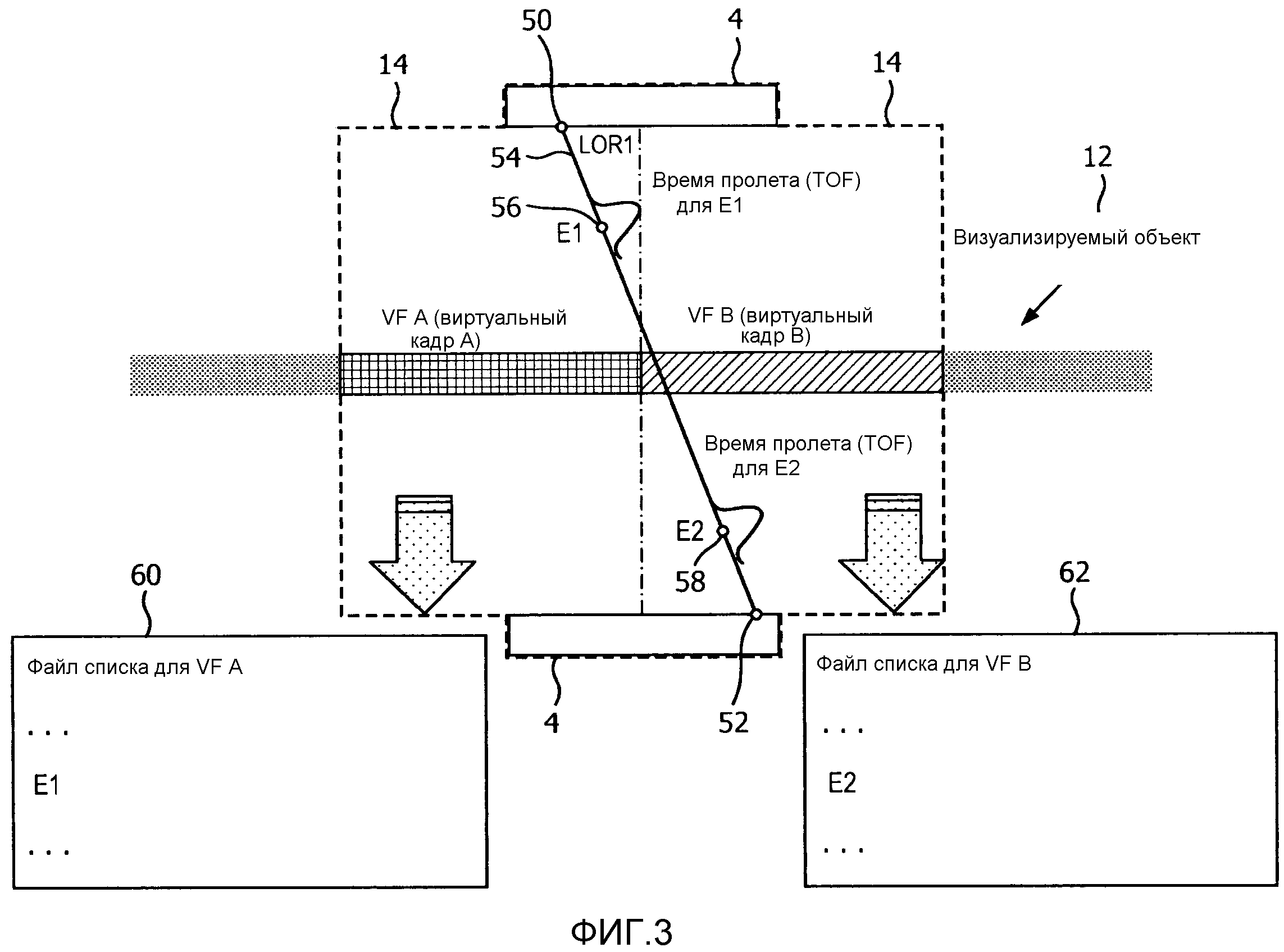
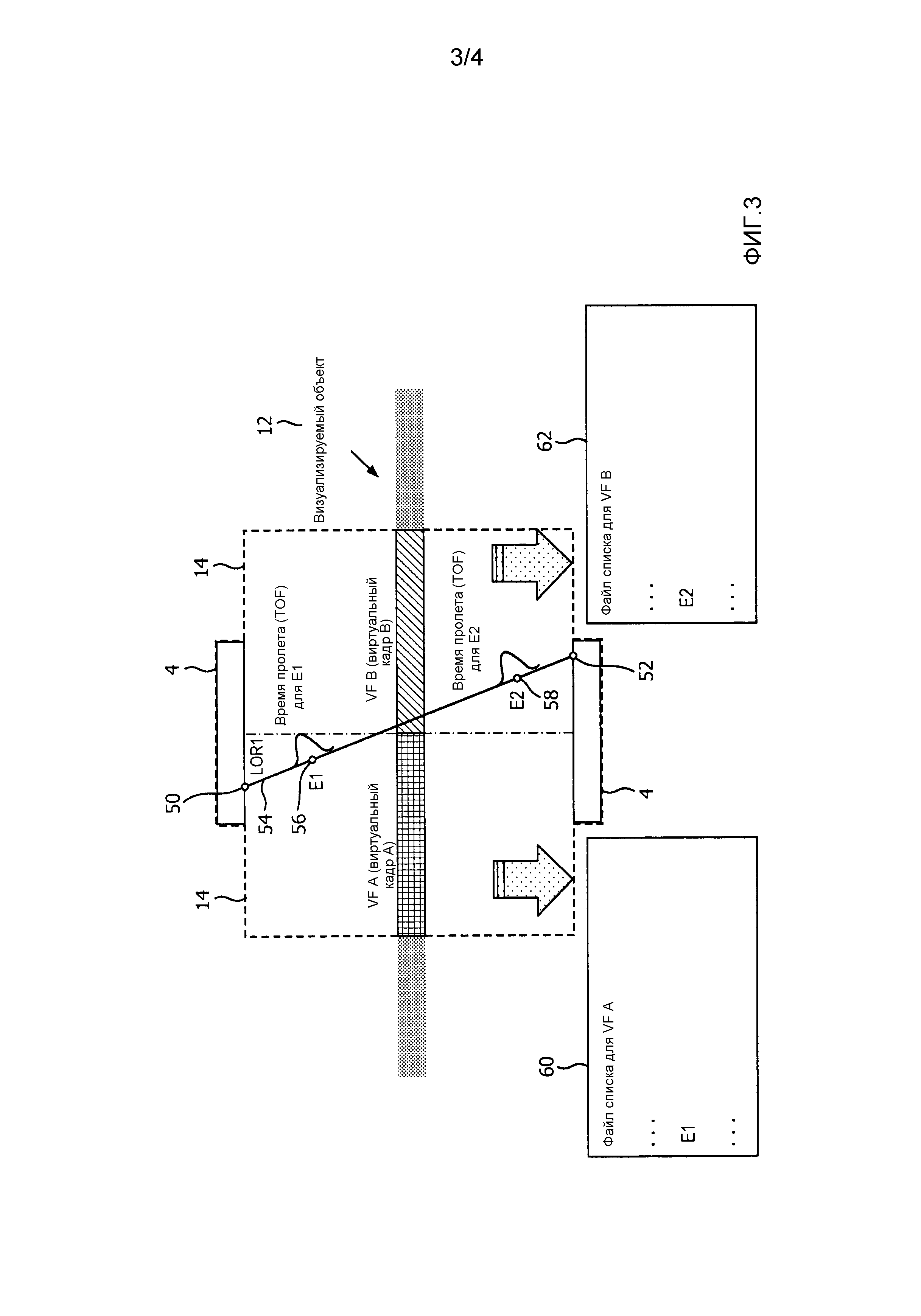
Фигура 3 – схематическое изображение примерного движения CBM с использованием времяпролетной (TOF) группировки событий по виртуальным кадрам.
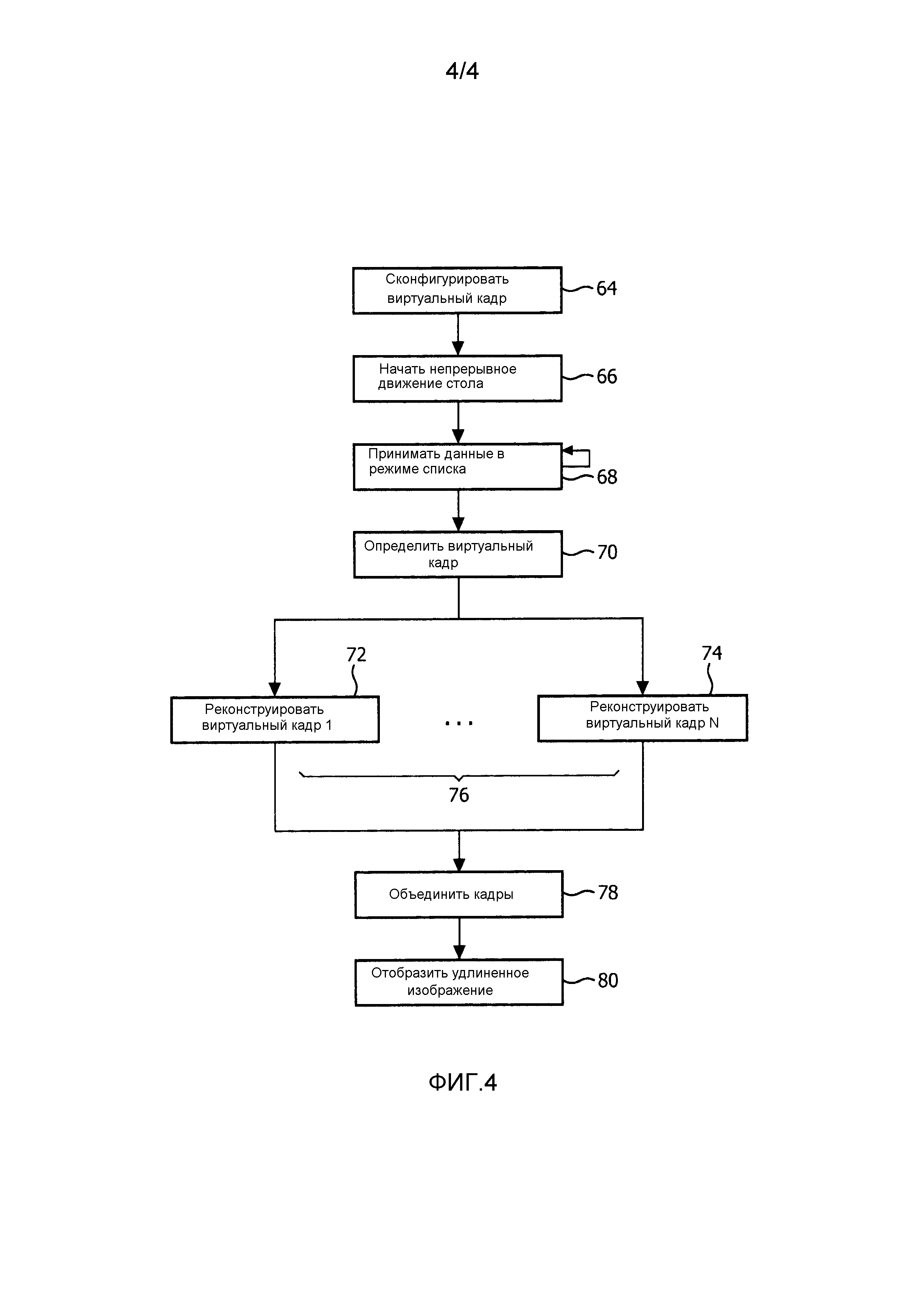
Фигура 4 – блок-схема последовательности операций для одного способа применения варианта осуществления движения CBM с виртуальными кадрами.
На фигуре 1 схематически изображен вариант осуществления TOF-ПЭТ системы (1) с CBM и виртуальными кадрами. Система 1 включает в себя TOF-ПЭТ сканер 2, показанный в разрезе. Предусмотрена также ПЭТ без времяпролетных измерений (без TOF). Сканер сконфигурирован с опорой 3 субъекта или столом, который перемещается в режиме непрерывного движения через решетку 4 ПЭТ-детекторов. Детекторы расположены вокруг отверстия или туннеля 6, через который опора субъекта движется в аксиальном направлении 8. Расположение детекторов 4 вокруг отверстия ограничивает поле 10 видения. Опора 3 субъекта поддерживает субъекта 12, которому введена инъекция радиофармацевтического препарата. По мере того как опора 3 субъекта перемещается через поле 10 видения, радиофармацевтический препарат распадается в то время, как он поглощается тканью и затем вымывается. По мере того как радиофармацевтический препарат распадается, испускаются позитроны, которые вызывают события аннигиляции, которые испускают гамма-фотоны в виде совпадающих пар. Совпадающие пары гамма-фотонов из поля 10 видения обнаруживаются детекторами 4. Движение CBM или перемещение опоры субъекта записывается в виде начальной позиции, постоянной скорости и затраченного времени, и/или позиционными датчиками, которые записывают точную позицию в момент времени, синхронизированный с детекторами. Данные для каждого события детектора включают в себя момент времени, когда обнаружено каждое событие пары, местоположение детектора, в котором обнаружено каждое событие, и местоположение опоры в момент времени обнаружения.
Объем или субъект 12, подлежащий визуализации подразделяется на смежные пространственные виртуальные кадры 14, заданные расстоянием вдоль аксиального направления перемещения опоры субъекта. Виртуальные кадры 14 могут быть любой длины и конфигурируются блоком 16 кадрирования. Длина каждого виртуального кадра 14, сконфигурированного блоком 16 кадрирования, может зависеть от множества различных факторов, например протокола сканирования, длины поля видения, конфигурации распределенных вычислений, скорости опоры субъекта, предполагаемого качества изображения, анатомических признаков субъекта из другого средства визуализации и т.п. Например, размеры могут быть установлены для одного кадра соответственно головному мозгу и для другого кадра соответственно сердцу, для еще одного соответственно брюшной полости и т.п. Кадры могут длиннее, короче или такого же размера, как поле 10 видения. В другом примере с многочисленными распределенными процессорами можно использовать много виртуальных кадров, чтобы распределить нагрузку по реконструкции. При большом значении скорости опоры субъекта, показаны более длинные виртуальные кадры.
Обнаруженные события совпадающих пар записываются в данные в режиме списка. Детекторы 4 соединены с памятью 18 данных в режиме списка, которая записывает события совпадающих пар по порядку. Данные в режиме списка включают в себя момент времени и местоположение каждого обнаруженного гамма-фотона, из которых выводится времяпролетная информация. Данные событий непрерывно собираются в режиме списка по мере того, как опора 3 субъекта непрерывно перемещается через поле 10 видения. Каждый виртуальный кадр 14 движется в поле видения, через поле видения и выходит из поля видения. Память данных в режиме списка может быть либо кратковременной, либо постоянной. Постоянная память включает в себя носители данных, например диск, виртуальные диски, облачное хранилище данных и т.п.
Группирующий блок 20 группирует совпадающие пары в один из виртуальных кадров 14 на основании пространственного местоположения, в котором произошло событие аннигиляционного распада. Группировка включает в себя пересчет из системы координат детекторов в систему координат опоры субъекта. Если субъект не перемещается, то опора субъекта и субъект совместно используют одну и ту же систему координат. Две системы координат совместно используют одинаковую планарную позицию или x-y-координаты и различаются только в z- или аксиальном направлении. Группировка различает разность между zd или координатой детектора и zs или координатой опоры субъекта. Решение может выполняться с использованием момента времени из данных в режиме списка и относительной позиции опоры субъекта в тот же момент времени. Относительная позиция опоры субъекта определяется по начальной позиции, скорости и затраченному времени и/или датчиками, которые определяют позицию в момент времени. Например, с моментом t0 времени начальной позиции, координатой zs=0 и скоростью 10 мм/с, в момент времени ti=50 с относительная координата равна zs=500 мм. Если начальная координата zs=zd для начальной позиции. То координата zs события, которое произошло в момент времени ti, задается как zd+500 мм. В качестве альтернативы, если известна позиция zs в моменты времени t1 и t2, и метка времени сбора данных указывает, что событие произошло в момент времени td, где t1<td<t2, и скорость является относительно постоянной, то позицию zs можно интерполировать для момента времени td.
Каждую совпадающую пару можно группировать в реальном времени, когда пара принимается, или ретроспективно из памяти данных в режиме списка. Группировка может включать в себя приписывание индекса, идентифицирующего его виртуальный кадр, совпадающей паре в памяти данных в режиме списка и/или распределение совпадающей пары в соответствующий отдельный список для каждого виртуального кадра 21. Следует отметить, события совпадающих пар группируются по пространственному местоположению, а не по времени обнаружения. В частности, когда граница раздела между двумя кадрами будет перемещаться по полю видения, события двух смежных кадров будут разбросаны по времени.
После того как виртуальный кадр вышел из поля видения, для виртуального кадра больше нельзя записать совпадающих пар событий. После того как все совпадающие пары, присутствующие в памяти данных в режиме списка в момент или до момента времени, когда каждый виртуальный кадр выходит из поля видения, сгруппированы, данный виртуальный кадр можно реконструировать. Каждый виртуальный кадр может быть реконструирован отдельно блоком 22 реконструкции. Блок 22 реконструкции реконструирует каждый виртуальный кадр с использованием совпадающих пар, сгруппированных для соответствующего виртуального кадра. Виртуальный кадр представляет законченную элементарную операцию реконструкции, которая может использовать методы распределенной обработки данных. Например, первый виртуальный кадр может быть распределен первому процессору, сконфигурированному с возможностью выполнения реконструкции, например реконструкции в декартовых координатах, реконструкции на основе синограмм или подобной реконструкции. В то время, когда первый процессор реконструирует первый кадр в изображение, данные снова и снова собираются для следующих виртуальных кадров. Когда данные для второго виртуального кадра становятся доступными в результате выхода кадра из поля видения и группировки совпадающих пар, второму процессору распределяется реконструкция второго виртуального кадра. По мере того как реконструкция каждого виртуального кадра в изображение заканчивается, процессору может быть повторно распределена реконструкция другого виртуального кадра. Процессоры могут включать в себя многоядерные процессоры и множественные процессоры и/или сочетания.
По мере того как блок реконструкции заканчивает реконструкцию каждого виртуального кадра в изображение, изображение кадра объединяется с другими реконструированными изображениями удлиненного изображения и может отображаться на устройстве 24 отображения, например, устройстве отображения рабочей станции 26. Устройство отображения может включать в себя компьютерный монитор, телевизионный экран, сенсорный экран, электроннолучевую трубку (ЭЛТ), плоскопанельный дисплей, дисплеи на светоизлучающих диодах (СД), электролюминесцентный дисплей (ЭЛД), плазменные дисплейные панели (ПДП), жидкокристаллический дисплей (ЖКД), дисплеи на органических светоизлучающих диодах (ОСД), проектор и т.п. Рабочая станция 26 включает в себя электронный процессор или электронные процессорные устройства 30. Дисплей 24 отображает удлиненное реконструированное изображение или каждый виртуальный кадр и меню, панели и элементы пользовательского управления, например, ввода или выбора информации о конфигурации, используемой блоком 16 кадрирования. Рабочая станция 20 может быть настольным компьютером, портативным компьютером, планшетом, мобильным компьютерным устройством, интеллектуальным телефоном и т.п. Устройство ввода может быть клавиатурой, мышью, микрофоном и т.п. Различные блоки 16, 20, 22 соответственно осуществляются посредством электронного устройства обработки данных, запрограммированного для выполнения функций различных блоков, и могут включать в себя электронный процессор или электронное процессорное устройство 28 рабочей станции 26 или посредством сетевого компьютера-сервера, соединяемого для работы с рабочей станцией 26, и так далее. Кроме того, раскрытые методы кадрирования, группировки и реконструкции соответственно реализуются с помощью постоянного носителя данных, хранящего команды (например, программное обеспечение), считываемые электронным устройством обработки данных и выполняемые электронным устройством обработки данных, чтобы выполнять раскрытые методы кадрирования, группировки и реконструкции. В качестве альтернативы, изображения каждого виртуального кадра можно повторно компоновать в объем изображения и сохранять в системе управления запоминающими устройствами, например, системах архивации и передачи изображений (PACS), радиологической информационной системе и т.п.
Фигура 2 схематически изображает примерный сбор данных с CBM и виртуальными кадрами 14. Объем субъекта, подлежащего визуализации, начинается в начальной точке 32 и заканчивается в конечной точке 34. Объем подразделяется на смежные виртуальные кадры 14. Сбор данных или аксиальная зона охвата сканера продолжается с начального момента времени 36, когда передний край первого кадра входит в поле видения, до конечного момента времени 38, когда задний край последнего кадра выходит из поля видения. Полный сбор 40 данных для каждого виртуального кадра 14 включает в себя передний компонент 42, основной компонент 44 и задний компонент 46. Передний компонент включает в себя линии LOR, которые содержат одну концевую точку в пределах виртуального кадра и одну концевую точку в переднем кадре. Основной компонент включает в себя линии LOR с обеими концевыми точками в виртуальном кадре, и задний компонент содержит одну концевую точку в виртуальном кадре и одну концевую точку в следующем кадре. Геометрия детекторов влияет на длину переднего и заднего компонентов. Размер туннеля и аксиальная протяженность детекторов определяет возможные линии LOR. Многие линии LOR возникают под углами, не ортогональными к оси перемещения. Таким образом, линии LOR могут пересекать виртуальные кадры, что означает, что сбор данных перекрывается между кадрами.
Фигура 3 схематически изображает примерное движение CBM с TOF (времяпролетной) группировкой по виртуальным кадрам совпадающих пар событий, которые охватывают два кадра. Совпадающая обнаруженная пара событий из первого 50 и второго 52 обнаруженных гамма-фотонов задает концевые точки линии срабатывания (LOR) 54. Позиция события аннигиляции, например E1 56 или E2 58, которое испустило обнаруженные гамма-фотоны, наблюдаемые вдоль линии LOR, определяется с помощью времяпролетной информации. Времяпролетная (TOF) информация обеспечивает информацию для определения местоположения или вероятностной кривой диапазона местоположений вдоль линии LOR, на которой произошло событие аннигиляции. Относительная позиция опоры субъекта, использующая синхронизированный момент времени, и/или позиция опоры субъекта обеспечивает пересчет в систему координат опоры субъекта. Таким образом, время пролета обеспечивает оценку, которая определяет в данном примере событие, возникшее в местоположении E1 или в местоположении E2. В случае возникновения в E1, обнаруженное совпадающее событие группируется в виртуальном кадре A посредством различения разности координат между детектором и опорой субъекта. В случае возникновения в E2 обнаруженное совпадающее событие группируется в виртуальном кадре B. Группировка выполняется группирующим блоком 20.
Местоположения пар гамма-фотонов определяются на основании позиции в системе координат опоры субъекта. Данная система включает в себя систему координат субъекта, который не двигается относительно опоры субъекта. Пары гамма-фотонов обнаруживаются как совпадающие пары посредством детекторов в системе координат детекторов. Группировка различает разность между двумя системами координат. В случае, когда TOF информация показывает событие, происходящее на границе кадра, событие можно различить либо группировкой события в обоих кадрах и взвешиванием границы в процессе реконструкции для перекрытия, либо группировкой по переднему краю, либо группировкой по заднему краю и т.п.
Группировка может включать в себя приписывание идентификатора, например индекса, данным в режиме списка и/или распределение данных в режиме списка по отдельным спискам. Отдельные списки можно использовать для предупреждения конфликтных ситуаций на уровне файлов и улучшения доступа к данным во время реконструкции. В данном примере, событие E1 распределяется в файл 60 списка для виртуального файла A, и событие E2 распределяется в файл 62 списка для виртуального файла B, на основании аксиальной координаты в момент времени t. Каждый список виртуального кадра A 60 и виртуального кадра B 62 включает в себя сгруппированные совпадающие пары или события для соответствующего виртуального кадра.
Вместо группировки по TOF события можно группировать другими способами, в частности, если TOF информация отсутствует. В одном примере событие аннигиляции распределяется кадру, который пересекается наибольшим участком линии LOR. В другом примере событие аннигиляции распределяется пропорционально обоим кадрам, например, на основании участков линии LOR.
Фигура 4 представляет блок-схему последовательности операций для одного способа применения варианта осуществления движения CBM с виртуальными кадрами. На этапе 64 виртуальные кадры 14 конфигурируются блоком 16 кадрирования. Конфигурация виртуальных кадров задает длину виртуального кадра вдоль аксиального направления 8 движения CBM. Виртуальные кадры 14 конфигурируются на основании ввода данных медицинским работником, медицинской карты субъекта, информации о конфигурации для TOF-ПЭТ сканера, распределенных вычислительных ресурсов и т.п.
После введения радиофармацевтического препарата и укладки субъекта 12 на опору 3 субъекта медицинским работником включает начало непрерывного движения стола (CBM) или перемещения опоры субъекта на этапе 66. Опора субъекта перемещается в режиме непрерывного движения и, предпочтительно, с, по существу, постоянной скоростью. Позиционные датчики и/или время определяют точную позицию опоры субъекта и виртуальных кадров. Непрерывное движение обеспечивает комфорт для пациента по сравнению с методами пошагового сканирования.
На этапе 68, система непрерывно принимает обнаруженные совпадающие пары, которые задают линии LOR в данных в режиме списка. Обнаруженные совпадающие пары включают в себя времяпролетную информацию. Обнаруженные совпадающие пары записываются в память данных в режиме списка. Пока опора субъекта двигается, система может непрерывно принимать обнаруженные данные. Движение CBM через детекторы вдоль аксиального направления обеспечивает более равномерный аксиальный профиль чувствительности. Дискретизация по аксиальной длине, которая проходит через детекторы, обеспечивает улучшенные осевую дискретизацию и пространственное разрешение. В альтернативном варианте осуществления информацию из других средств, например КТ, используют, чтобы задать виртуальный кадр для начала сбора данных для сбора данных, адаптированного к области интереса.
Обнаруженные совпадающие пары в памяти 18 данных в режиме списка группируются на этапе 70 посредством группирующего блока 20. Группировка может начинаться, как только каждое событие совпадающей пары записывается в памяти 18 данных в режиме списка и продолжается по мере того, как события добавляются в память. Группировка различает разность между системой координат детекторов 4 и опоры 3 субъекта и группирует событие в виртуальный кадр, в котором, как установлено или получено проецированием, произошло событие аннигиляции. Сгруппированный виртуальный кадр может включать в себя идентификатор, введенный в память данных в режиме списка, или сгруппированный виртуальный кадр может включать в себя распределение события в отдельный список для каждого виртуального кадра, соответственно.
Когда виртуальный кадр 14 покидает поле 10 видения детекторов 4, сбор данных для виртуального кадра заканчивается. В ряде параллельных этапов 70, реконструирующий блок 22 реконструирует каждый сгруппированный виртуальный кадр. Реконструкция каждого кадра использует отдельный список каждого виртуального кадра или индекс идентификаторов в памяти данных в режиме списка. Например, первый виртуальный кадр реконструируется на этапе 66, и конечный виртуальный кадр N реконструируется отдельно на этапе 68. Реконструкция виртуальных кадров по отдельности предусматривает применение методов распределенных вычислений для уменьшения узких мест вычислений и эффективной параллельной реконструкции изображения. Для каждой параллельной реконструкции можно использовать информацию, например карты ослабления, из других средств.
По мере того как каждая параллельная реконструкция заканчивается, реконструированное изображение каждого виртуального кадра, при желании, отображается на устройстве 24 отображения во время ряда параллельных этапов 76. Например, когда реконструкция первого виртуального кадра 66 заканчивается, изображение первого виртуального кадра отображается на устройстве отображения на этапе 72. Последующие виртуальные кадры могут отображаться бок о бок, с перекрытием и т.п. Отображение может продолжаться для каждого виртуального кадра, заканчивая конечным виртуальным кадром N на этапе 74. Кадры повторно компонуются 78 в непрерывное удлиненное изображение. Удлиненное изображение отображается, сохраняется в архивах пациентов и т.п. Медицинский работник может взаимодействовать с системой с помощью устройства 30 ввода.
Следует понимать, что в связи с конкретными наглядными вариантами осуществления, приведенными в настоящем описании, некоторые конструктивные и/или функциональные признаки описаны как включенные в определенные элементы и/или компоненты. Однако предполагается, что с такой же или подобной пользой упомянутые признаки могут быть также аналогичным образом включены в другие элементы и/или компоненты, в подходящем случае. Также следует понимать, что разные аспекты примерных вариантов осуществления можно выборочно использовать как подходящие для получения других альтернативных вариантов осуществления, пригодные для требуемых применений, при этом другие альтернативные варианты осуществления реализуют тем самым соответствующие преимущества заложенных в них аспектов.
Следует также понимать, что функции конкретных элементов или компонентов, описанных в настоящей заявке, могут быть соответственно реализованы посредством аппаратного обеспечения, программного обеспечения, программно-аппаратного обеспечения или их сочетания. Кроме того, следует понимать, что некоторые элементы, описанные в настоящей заявке как объединенные, могут быть в подходящих условиях независимыми или иначе разделенными элементами. Аналогично, множество конкретных функций, описанных как выполняемые одним конкретным элементом, могут выполняться множеством отдельных элементов, работающих независимо для выполнения отдельных функций, или некоторые отдельные функции можно разделить и выполнять множеством совместно работающих отдельных элементов. В качестве альтернативы, напротив, некоторые элементы или компоненты, описанные и/или показанные в настоящей заявке как отдельные друг от друга, можно физически или функционально объединять в подходящих случаях.
Вкратце, настоящее описание приведено выше со ссылкой на предпочтительные варианты осуществления. Безусловно, специалистам после прочтения и изучения настоящего описания придут на ум модификации и изменения. Предполагается, что изобретение следует интерпретировать как включающее в себя все упомянутые модификации и изменения в той степени, в которой они находятся в пределах объема охраны прилагаемой формулы изобретения или ее эквивалентов. То есть будет ясно, что многие из раскрытых выше и других признаков и функций или их альтернативы можно, при желании, объединять во многих других разных системах или областях применения, а также, что различные непредусмотренные или непредвиденные на данный момент альтернативы, модификации, варианты или усовершенствования в настоящей заявке могут быть впоследствии созданы специалистами в данной области техники, которые, как аналогично предполагается, должны охватываться нижеприведенной формулой изобретения.
Комплект для использования в приборе для создания жидких капель
Ручная система поддержки давления для лечения гиперинфляции
Оптическая система и способ для анализа в реальном времени жидкого образца
Дешевый безопасный дисплей для магнитного резонанса с сенсорным экраном
Паровой утюг
Способы и устройства для кодирования hdr-изображений и способы и устройства для использования таких кодированных изображений
Планирование траектории рамы с-типа для оптимального получения изображений в эндоскопической хирургии
Устройство аудиообработки и способ для этого
Система и способ эластографических измерений
Способ кодирования сигнала видеоданных для использования с многовидовым устройством визуализации
Насадка пылесоса
Обнаружение зубного налета с использованием потокового зонда
Узел вакуумной колбы
Обнаружение налета с использованием потокового зонда
Обнаружение десны с использованием оптического детектора в устройстве обнаружения зубной гигиены
Лазер с вертикальным резонатором и поверхностным излучением
Устройство для преобразования движения пользователя в электрическое напряжение
Способ и система выбора частоты проведения анализа газового состава артериальной крови для новорожденных
Ультразвуковая установка отображения изображений для удаленного терминала отображения

