Результат интеллектуальной деятельности: Система дистанционного управления вертолетом
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может найти применение в бортовых системах дистанционного управления летательными аппаратами, в частности вертолетами.
Неоспоримыми достоинствами системы дистанционного управления (СДУ) являются возможности широкой и эффективной автоматизации режимов полета летательного аппарата (ЛА), обеспечения заданного уровня характеристик устойчивости и управляемости, реализации функций предупреждения (сигнализации экипажу) и предотвращения выхода за установленные эксплуатационные ограничения. При этом возникает необходимость использования СДУ в комплексе с системой автоматического управления (САУ), системой формирования и выдачи экипажу ограничительных сигналов (СОС), автоматикой ограничения предельных режимов (ОПР). Использование СДУ позволяет значительно упростить конструкцию, летную и техническую эксплуатацию системы управления, а также ее связи с САУ и с другими системами бортового комплекса. Но, главное, использование СДУ дает возможность применения более гибких законов управления, обеспечивающих качественно и количественно существенно более высокие характеристики устойчивости, управляемости и маневренности вертолета на всех режимах полета. В дальнейшем, систему, объединяющую в себе функции СДУ, САУ, СОС и ОПР, будем называть комплексной системой дистанционного управления (КСДУ).
Известна электродистанционная система управления, представленная в патенте RU 2174702 С1, МПК7 G05G 11/00, опубликованном 10.10.2001. Изобретение относится к электродистанционным системам управления. Каждый из двух управляющих органов имеет датчик усилия, прилагаемого его оператором. Каждый из двух электромеханических приводов имеет датчик его положения и выполнен с возможностью выполнения функции интегрирующего звена. Устройство управления электромеханическими приводами содержит сумматор, соединенный с выходами датчиков усилий, и подключено к выходам обоих датчиков положения. Управляемый орган подключен к выходу одного из датчиков положения. Управляющий вход одного из приводов может быть соединен с выходом сумматора сигналов датчиков усилий, а управляющий вход другого привода - с выходом сумматора сигналов датчиков положения. Между выходом сумматора сигналов датчиков усилий и входами двух управляющих сумматоров может быть включен интегрирующий элемент. В каждом из управляющих сумматоров другой вход соединен с выходом датчика положения соответствующего привода, а выход - с управляющим входом этого же привода. Каждый привод может быть снабжен редуктором и соединен с датчиком положения посредством одного из управляющих органов и датчика усилия.
Недостатком указанной системы является ограниченность функциональных возможностей. Кроме того, не предусмотрена возможность реконфигурации системы в случае отказа каналов управления для обеспечения продолжения выполнения задания или возврата на аэродром посадки и недостаточно уделено внимание вопросам кворумирования сигналов резервированных каналов для контроля исправности всех систем управления. При обнаружении отказа система переходит в аварийный режим, который позволяет осуществить только посадку вертолета.
Известна Система управления вертолетом, патент № RU 2282562, МПК7 В64С 13/40, G05D 1/00, опубликован 27.08.2006 г., выбранная в качестве прототипа. Известная система управления вертолетом содержит в каждом канале управления орган управления, кинематически связанный с датчиком его положения, электрически связанный с электронным вычислителем, к которому подключена бортовая информационная система контроля и который по аналоговому выходу связан с дистанционными рулевыми приводами, а также датчики параметров полета. Выходы датчиков параметров полета подключены к указанному вычислителю, датчик положения органа управления в каждом канале управления и электронный вычислитель по цифровой части и по аналоговой части выполнены минимум двукратно резервированными и с функцией формирования и обработки сигналов одновременно во всех резервированных каналах.
Недостатком указанной системы управления, также как и описанной выше, является ограниченность функциональных возможностей, что обусловлено, в частности, отсутствием возможности реконфигурации архитектуры, как системы в целом, так и ее составных частей, таких как, например, СДУ. Это в свою очередь в случае отказа какого-либо из каналов не позволяет продолжить полет для выполнения задания или возврат на аэродром посадки. Кроме того, недостаточно внимания уделено вопросам кворумирования сигналов резервированных каналов для контроля исправности системы.
Целью заявляемого изобретения является расширение функциональных возможностей системы дистанционного управления и повышение надежности работы комплекса путем обеспечения возможности реконфигурации архитектуры вычислительно-управляющего оборудования дистанционной системы управления ЛА.
Указанная цель достигается тем, что система дистанционного управления вертолетом, содержащая в каждом канале органы управления, кинематически связанные с датчиками положения ручек управления (ДПР), электрически связанными с резервированным электронным вычислительным устройством (ВУ), которое связано с рулевыми приводами, а также с комплексом бортового оборудования (КБО), выходы которого подключены к указанному ВУ, отличается тем, что в нее дополнительно введены на первом посту управления двукратно резервированный блок преобразования сигналов (БПС), первый двукратно резервированный интегрированный блок датчиков (ИБД), первый четырехкратно резервированный блок управления приводом (БУП), четырехкратно резервированный блок резервной навигации (БРН), второй четырехкратно резервированный БУП, четырехкратно резервированный блок кворумирования сигналов резервных каналов (БКС), четырехкратно резервированный блок управления архитектурой СДУ (БУА), третий четырехкратно резервированный БУП, на втором посту управления - второй двукратно резервированный ИБД, второй двукратно резервированный БПС, четвертый четырехкратно резервированный БУП и второе двукратно резервированное ВУ, четырехкратно резервированные ДПР первого и второго поста управления соединены между собой и соединены с входами первого и второго БПС соответственно, которые соединены между собой шинами БПС и ВУ, а также соединены с выходами первого и второго ИБД соответственно, первый, второй, третий и четвертый резервированные БУП соединены с шиной ВУ и с входами соответствующих электромеханических приводов, входы БРН соединены с выходами первого и второго резервированных ИБД, выходы БРН соединены с шиной БПС, блок БКС подключен ко входам БУА, причем БУА и БКС соединены с шинами ВУ и БПС, а шина ВУ соединена с шиной КБО, к которой подключены все системы комплекса бортового оборудования.
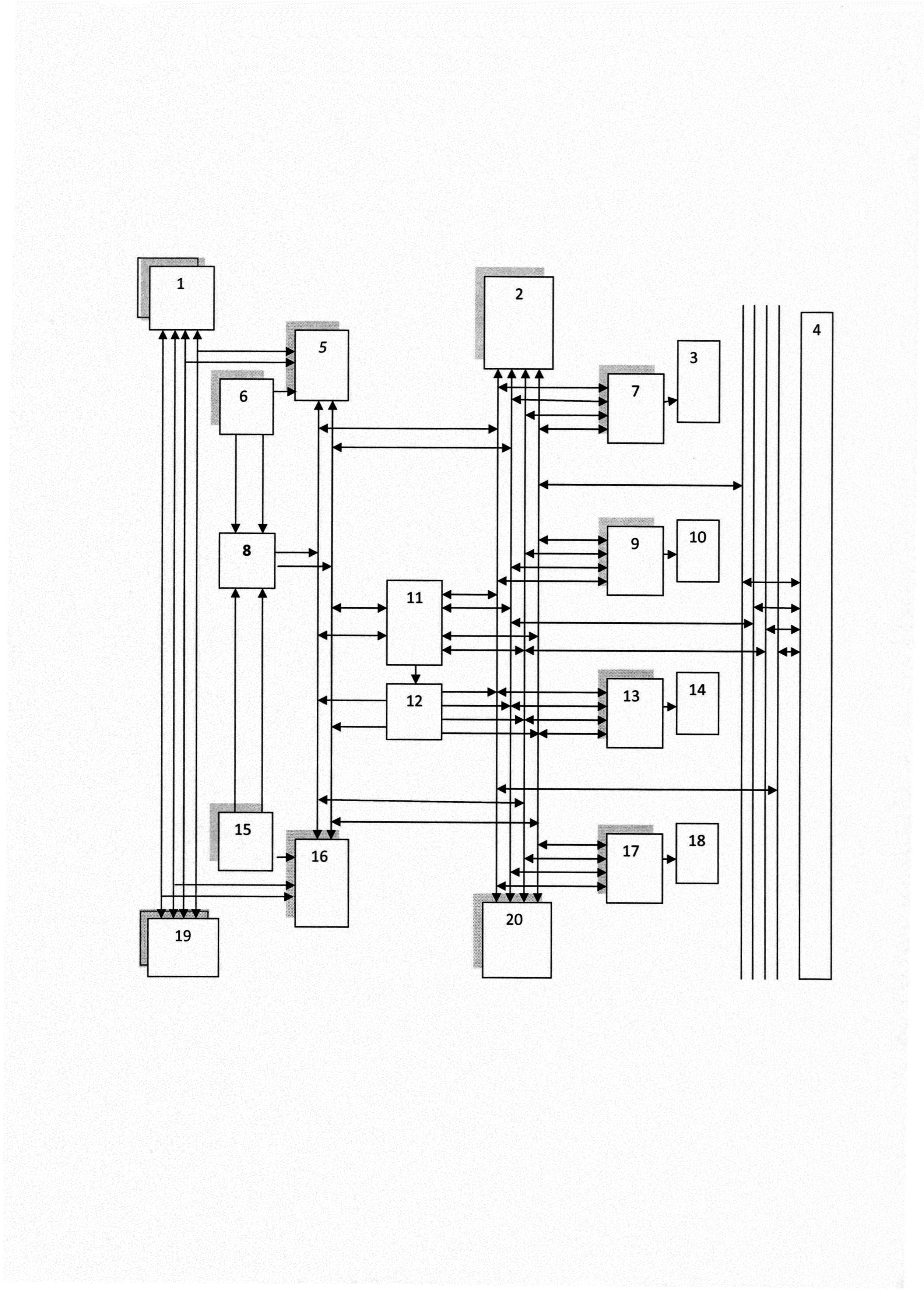
Сущность изобретения поясняется чертежом, на котором представлена структурная схема СДУ.
СДУ содержит: на первом посту управления ручки 1 управления общим шагом и цикличным шагом с четырехкратно резервированными ДПР (на чертеже не показан), двукратно резервированное вычислительное устройство 2 ВУ, первый электромеханический привод 3, комплекс бортового оборудования 4 КБО, двукратно резервированный блок 5 БПС, двукратно резервированный блок 6 ИБД, первый четырехкратно резервированный блок 7 БУП, четырехкратно резервированный блок 8 резервной навигации БРН, второй четырехкратно резервированный блок 9 БУП, второй электромеханический привод 10, четырехкратно резервированный в каждом канале блок 11 БКС 1, четырехкратно резервированный блок 12 БУА, третий четырехкратно резервированный блок 13 БУП, третий электромеханический привод 14, второй двукратно резервированный блок 15 ИБД, второй двукратно резервированный блок 16 БПС, четвертый четырехкратно резервированный блок 17 БУП, четвертый электромеханический привод 18, ручки 19 управления общим шагом и цикличным шагом с четырехкратно резервированными ДПР на втором посту управления, второе двукратно резервированное вычислительное устройство 20 ВУ.
Для управления вертолетом используют четыре привода: три привода для управления тарелкой автомата перекоса и ползуном общего шага несущего винта и один привод для управления общим шагом хвостового винта.
Управление осуществляют с двух постов управления: поста управления первого и поста управления второго. Каждый пост управления включает:
- ручку управления боковую (РУБ), выполняющую функции продольного и поперечного управления;
- рычаг общего шага (РОШ);
- пульт управления СДУ.
Вычислитель управления полетом ВУ выполняет функции вычислителя САУ и ОПР верхнего уровня. Управление режимами САУ осуществляется с ПУ СДУ, а также от кнопок, расположенных на ручках управления ЛА. По внешней шине от КБО в ВУ поступает необходимая для выполнения функций САУ и верхнего уровня ОПР информация от систем КБО.
Блок преобразования сигналов БПС предназначен для добавления сигналов управления, сформированных алгоритмами БПС (например, сигналы демпфирования и стабилизации углов крена и тангажа). Затем суммарные сигналы управления в БПС, пересчитанные в заданные значения штоков, поступают для отработки в БУП.
Блоки управления приводами БУП формируют сигналы управления приводом ui на основе информации о заданном положении штока δiзад, а также на основе сигналов положения штока δiзад, поступающих из привода с датчиков обратных связей. Тем самым обеспечивается установка штоков в заданное положение.
Интегрированный блок датчиков ИБД предназначен для выдачи сигналов, пропорциональных угловым скоростям и линейным ускорениям в связанной с ЛА системе координат.
Блок резервной навигации БРН предназначен для преобразования сигналов ИБД в сигналы, пропорциональные углам крена и тангажа.
Блок кворумирования сигналов резервных каналов БКС предназначен для кворумирования одноименных сигналов резервированных датчиков, блоков и шин с целью выявления отклонения их параметров от пороговых значений и подачи сигнала в блок БУА.
Блок управления архитектурой БУА предназначен для выработки оптимальной архитектуры СДУ и подачи команды в БПС, ВУ и БУП с целью реорганизации архитектуры СДУ.
Структура СДУ представляет собой совокупность архитектур, характеризующих систему с независимых, но взаимосвязанных точек зрения, отражающих природу разных классов ресурсов, на основе которых СДУ должна строиться: функционально-алгоритмических (результирующей формой которых являются программные ресурсы); информационно-вычислительных и коммуникационных (топология бортовой распределенной вычислительной среды СДУ с шинами информационного обмена), аппаратных и энергетических. Наиболее важным среди указанных классов ресурсов является класс функциональных ресурсов, обеспечивающих достижение целей разработки СДУ в смысле обеспечения решения в соответствующей функциональной архитектуре предписанных системе задач управления полетом. Эта архитектура разрабатывается первой, что позволяет обеспечить безусловную реализацию всех функций СДУ при последующем проектировании других архитектур по принципу «сверху-вниз». В СДУ обеспечивают максимальную внутрисистемную унификацию блоков и модулей.
Для повышения живучести СДУ в предлагаемом изобретении четыре резерва вычислительно-управляющей системы разделены на блоки левого и правого бортов, согласно постам управления, в каждом из которых реализовано по два резерва, пространственно рассредоточенных на борту вертолета.
В СДУ предусмотрены три режима работы: основной режим, альтернативный режим и резервный режим.
Контроль исправности 4-кратно резервированных каналов управления осуществляют методом определения разности сигналов 4-х каналов между собой. Путем сравнения разностей с назначенным порогом определяют исправность каналов управления, по результатам проверки выбирают один из трех режимов управления и выдают сигнал на индикатор режимов работы СДУ, производят соответствующую ему реконфигурацию архитектуры блоков вычисления и управления.
Если все системы исправны, работает архитектура, соответствующая режиму управления "основной". Основной режим управления - режим максимальной функциональной конфигурации, в котором задействованы все основные функциональные элементы КСДУ при числе вычислителей в каждом контрольном сечении не менее 3-х. В основном режиме работают все функциональные блоки, обеспечивающие решение всех функциональных задач СДУ в полном объеме, и ядро СДУ, образованное программно-аппаратными ресурсами СДУ, наращивают за счет соответствующих ресурсов САУ и взаимодействия с КБО. Связь СДУ с системами КБО осуществляют по шинам цифрового обмена через вычислители САУ. Вычислители САУ, в виду высокой критичности выполняемых ею функций на этапах взлета и посадки по категории IIIA, также выполняют резервированными.
При возникновении более 2-х последовательных отказов в разноименных контрольных сечениях осуществляют архитектурное преобразование, соответствующее режиму управления "альтернативный", при котором задействованы все функциональные компоненты СДУ, но допускается возникновение более 2-х последовательных отказов в разноименных контрольных сечениях. В альтернативном режиме задействованы интегрированные блоки датчиков ИБД в качестве датчиков линейных ускорений и угловых скоростей, а в части СДУ задействованы все функциональные элементы, но число вычислителей-резервов в каком-либо контрольном сечении из-за отказов уменьшилось до трех. В этом режиме управления используют режимы демпфирования и стабилизации крена и тангажа по сигналам ИБД в помощь летчику при ручном управлении. Углы крена и тангажа вычисляют блоками резервной навигации. В альтернативном режиме работают функциональные блоки СДУ без привлечения блоков КБО и обеспечивают решение определенного круга задач. Переход в альтернативный режим управления осуществляется автоматически при отказе цифрового обмена с системами КБО либо при отказе всех основных взаимодействующих систем КБО. В этом режиме должны обеспечиваться безопасное завершение полета и посадка вертолета в ситуации не хуже сложной. В альтернативном режиме выполняют в полном объеме только функции ручного автоматизированного управления и нижнего уровня ОПР.
После второго отказа в каком-либо одном контрольном сечении тракта формирования и передачи сигналов управления на уровне КБО, СДУ переходит автоматически в режим управления "резервный", в котором сохраняются только сигналы, передаваемые на привод с органов управления ЛА летчиком. Подсистему, обеспечивающую режим резервного управления, реализуют в виде ядра КСДУ, обособленного по всем видам ресурсов от других устройств КСДУ, а также от систем КБО. В резервном режиме доступны только функции ручного управления.
В резервном режиме управляющие сигналы формируются цифровым вычислителем только по сигналам датчиков ДПР. В резервный режим СДУ переходит автоматически, при возникновении критических отказов и реконфигурация режимов работы КСДУ будет осуществляться автоматически. При наличии интегрального сигнала неисправности ВУ (выдаваемого извне самими ВУ или сформированного кворумами на входе БПС: неисправны два и более резерва ВУ) СДУ должна переходить в режим резервного управления по сигналам БКС и БУА. Все резервы БПС при этом могут быть исправны. Для формирования заданного положения штоков приводов блоки БПС в этом режиме не используют сигналы управления, поступающие из ВУ. В этом случае сигналы заданного положения штоков вычисляют только на основе алгоритмов СДУ и СУУ, реализованных в БПС.
Таким образом, в режиме резервного управления в КСДУ задействованы следующие элементы: ДПР РУБ и РОШ, БПС, ИБД, БУП, внутренние шины обмена, переключатель "Резервный режим". В режиме резервного управления сохраняют функции демпфирования угловых колебаний и функцию автоматической балансировки.
В предлагаемом изобретении используют принцип сохранения автономии СДУ по всем видам ресурсов, прежде всего в интересах обеспечения ее надежности и отказобезопасности, а также с целью упрощения процедур разработки. Кроме того, применительно к функциональным подсистемам СДУ применен принцип рационального обособления внутри комплексной системы. Так, СДУ не взаимодействует напрямую с КБО. Причем в составе СДУ для резервного режима (прямого) управления вводится дополнительная внутренняя полная автономия. В этом режиме СДУ функционирует только на основе собственных ресурсов и не взаимодействует не только с КБО, но и с САУ. На этот режим "наслаиваются" все другие режимы управления, реализующие дополнительные функции, в том числе и функции САУ. Такое обособление и автономия СДУ могут быть обеспечены на основе концепции построения сетевых распределенных архитектур для бортовых систем ЛА. Кроме того, архитектура распределенной вычислительной среды системы управления должна определяться ее функциональной архитектурой.
Техническим результатом является расширение функциональных возможностей системы дистанционного управления, позволяющее осуществить возвращение на аэродром взлета или продолжать выполнение задания при наличии двух и более отказов в разноименных сечениях. Повышение надежности работы комплекса осуществляется путем реконфигурации архитектуры КСДУ.
Система дистанционного управления вертолетом, содержащая в каждом канале органы управления, кинематически связанные с датчиками положения ручек управления (ДПР), электрически связанными с резервированным электронным вычислительным устройством (ВУ), которое связано с рулевыми приводами, а также с комплексом бортового оборудования (КБО), выходы которого подключены к указанному ВУ, отличающаяся тем, что в нее дополнительно введены на первом посту управления двукратно резервированный блок преобразования сигналов (БПС), первый двукратно резервированный интегрированный блок датчиков (ИБД), первый четырехкратно резервированный блок управления приводом (БУП), четырехкратно резервированный блок резервной навигации (БРН), второй четырехкратно резервированный БУП, четырехкратно резервированный блок кворумирования сигналов резервных каналов (БКС), четырехкратно резервированный блок управления архитектурой СДУ (БУА), третий четырехкратно резервированный БУП, на втором посту управления - второй двукратно резервированный ИБД, второй двукратно резервированный БПС, четвертый четырехкратно резервированный БУП и второе двукратно резервированное ВУ, четырехкратно резервированные ДПР первого и второго поста управления соединены между собой и соединены с входами первого и второго БПС соответственно, которые соединены между собой шинами БПС и ВУ, а также соединены с выходами первого и второго ИБД соответственно, первый, второй, третий и четвертый резервированные БУП соединены с шиной ВУ и с входами соответствующих электромеханических приводов, входы БРН соединены с выходами первого и второго резервированных ИБД, выходы БРН соединены с шиной БПС, блок БКС подключен ко входам БУА, причем БУА и БКС соединены с шинами ВУ и БПС, а шина ВУ соединена с шиной КБО, к которой подключены все системы комплекса бортового оборудования.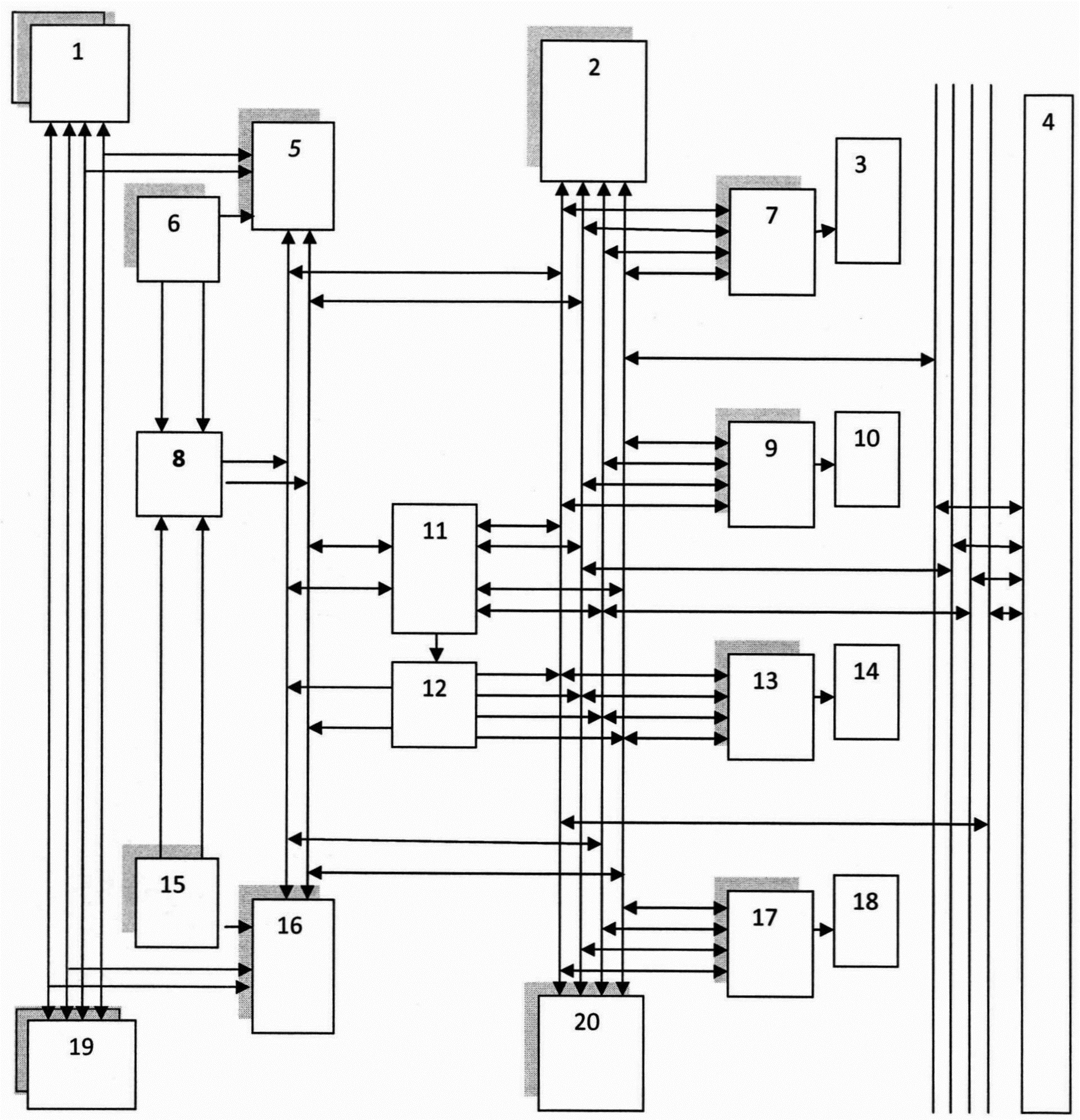
Самолет с системой дистанционного управления
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Самолет с системой дистанционного управления
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения

