Результат интеллектуальной деятельности: Способ определения угловой ориентации беспилотного летательного аппарата
Вид РИД
Изобретение
Изобретение относится к области устройств измерения углового положения объектов в пространстве и может быть использовано для определения угла тангажа и крена беспилотного летательного аппарата (БПЛА).
Известен способ определения угла тангажа и крена БПЛА, описанный в патенте [US 6,181,989 В1, 30.01.2001] и заключающийся в использовании датчиков инфракрасного излучения (ИК датчиков) для выявления разности температурного фона вокруг летательного аппарата.
Недостатком способа является ограничение, накладываемое на расположение модуля ИК датчиков в конструкции БПЛА и заключающееся в том, что пары ИК датчиков ориентированы строго вдоль продольной и поперечной оси БПЛА. Такое расположение приводит к тому, что в поле зрения ИК датчиков попадают моторы, которые в процессе своей работы нагреваются и становятся побочными источниками инфракрасного излучения. Помимо этого, поле зрения ИК датчиков ограничивается крыльями и частями фюзеляжа БПЛА. Эти факторы приводят к появлению ошибок и снижают точность определения углов тангажа и крена.
Наиболее близким к представленному выше способу является способ, описанный в патенте [RU 100231 U1, 10.12.2010], заключающийся в измерении инфракрасного фона четырьмя ИК датчиками, размещенными на печатной плате взаимно перпендикулярно в одной плоскости. Так как оптические оси ИК датчиков ориентированы вдоль продольной и поперечной осей фюзеляжа БПЛА, становится возможным вычисление углов тангажа и крена на основе относительного разностного сигнала противоположно направленных ИК датчиков. Значения рассчитанных углов верифицируются на основе данных двухосевого или трехосевого некорректируемого датчика угловой скорости (ДУС), оси чувствительности которого расположены параллельно осям симметрии летательного аппарата. В случае, когда значения углов, рассчитанных на основе данных ИК датчиков, расходятся со значениями углов, рассчитанных с помощью ДУС, первые признаются неверными и вычисление углов ориентации осуществляется только по данным ДУС.
Недостаток этого способа заключается в том, что введение ДУС повышает надежность определения углов тангажа и крена при условиях, неблагоприятных для работы ИК датчиков, однако не решает проблему снижения точности и появления ошибок при попадании в поле зрения ИК датчиков винтов, моторов, крыльев, тепловыводящих элементов фюзеляжа и прочих элементов конструкции БПЛА.
Техническая задача изобретения заключается в повышении точности определения углов тангажа и крена БПЛА за счет исключения попадания в поле зрения ИК датчиков источников побочного инфракрасного излучения, а также перекрытия поля зрения элементами конструкции БПЛА.
Поставленная техническая задача в способе решается тем, что ИК датчики с углом поля зрения ε группируют попарно так, чтобы их оптические оси лежали в одной плоскости, были параллельны и направлены противоположно, каждую пару датчиков устанавливают под таким углом α к продольной оси фюзеляжа, чтобы виоле зрения датчиков не попадали элементы конструкции БПЛА, далее для каждой пары датчиков вычисляют относительный разностный сигнал, затем на основании полученных разностных сигналов определяют углы возвышения пар датчиков, после чего рассчитывают углы тангажа и крена по следующим зависимостям:
 ,
,
 ,
,
где θ - угол тангажа, γ - угол крена, hB1 - угол возвышения первой пары датчиков инфракрасного излучения, αB1 - угол между первой парой датчиков инфракрасного излучения и продольной осью фюзеляжа БПЛА, hB2 - угол возвышения второй пары датчиков инфракрасного излучения, αB2 - угол между второй парой датчиков инфракрасного излучения и продольной осью фюзеляжа БПЛА.
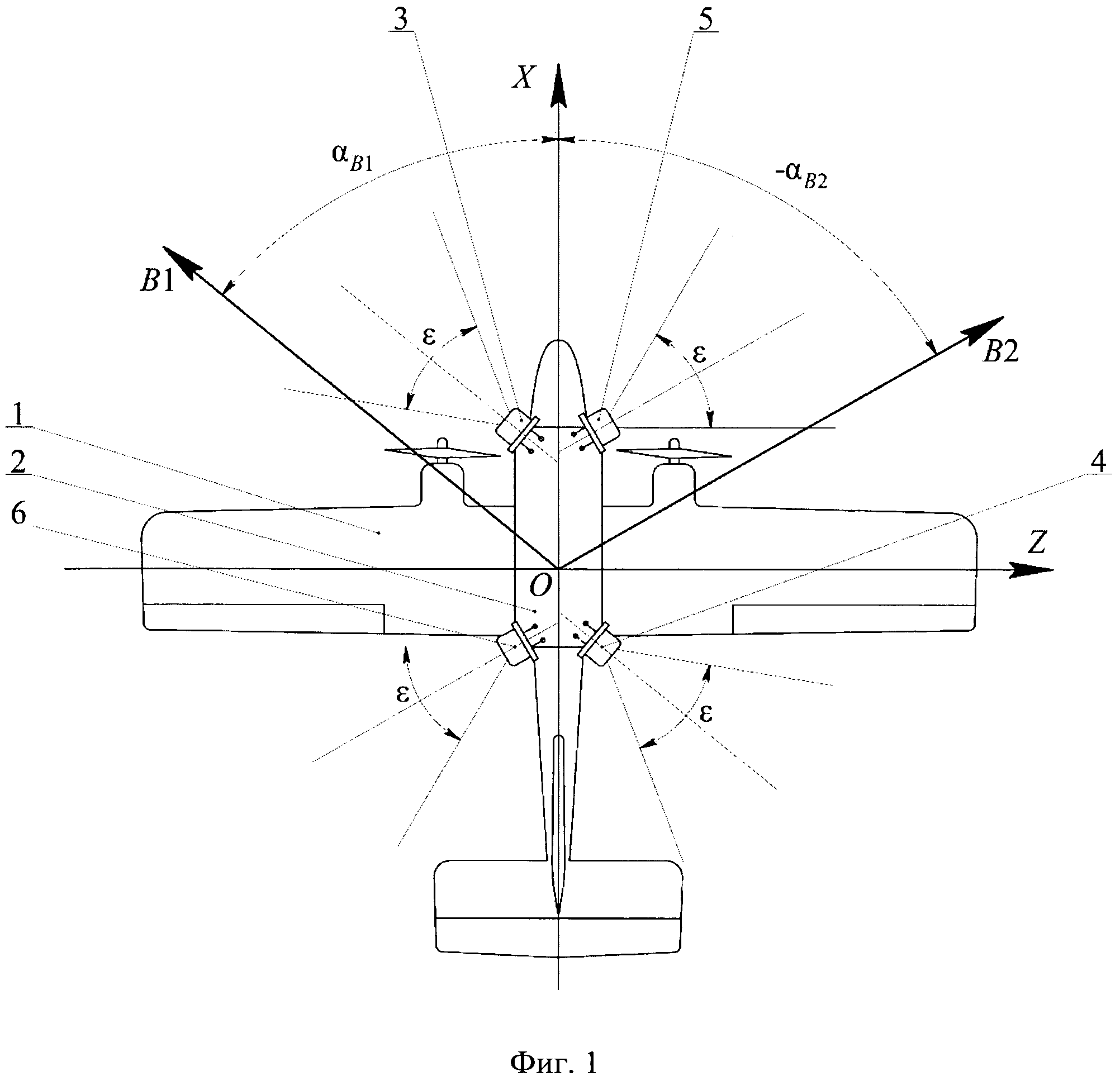
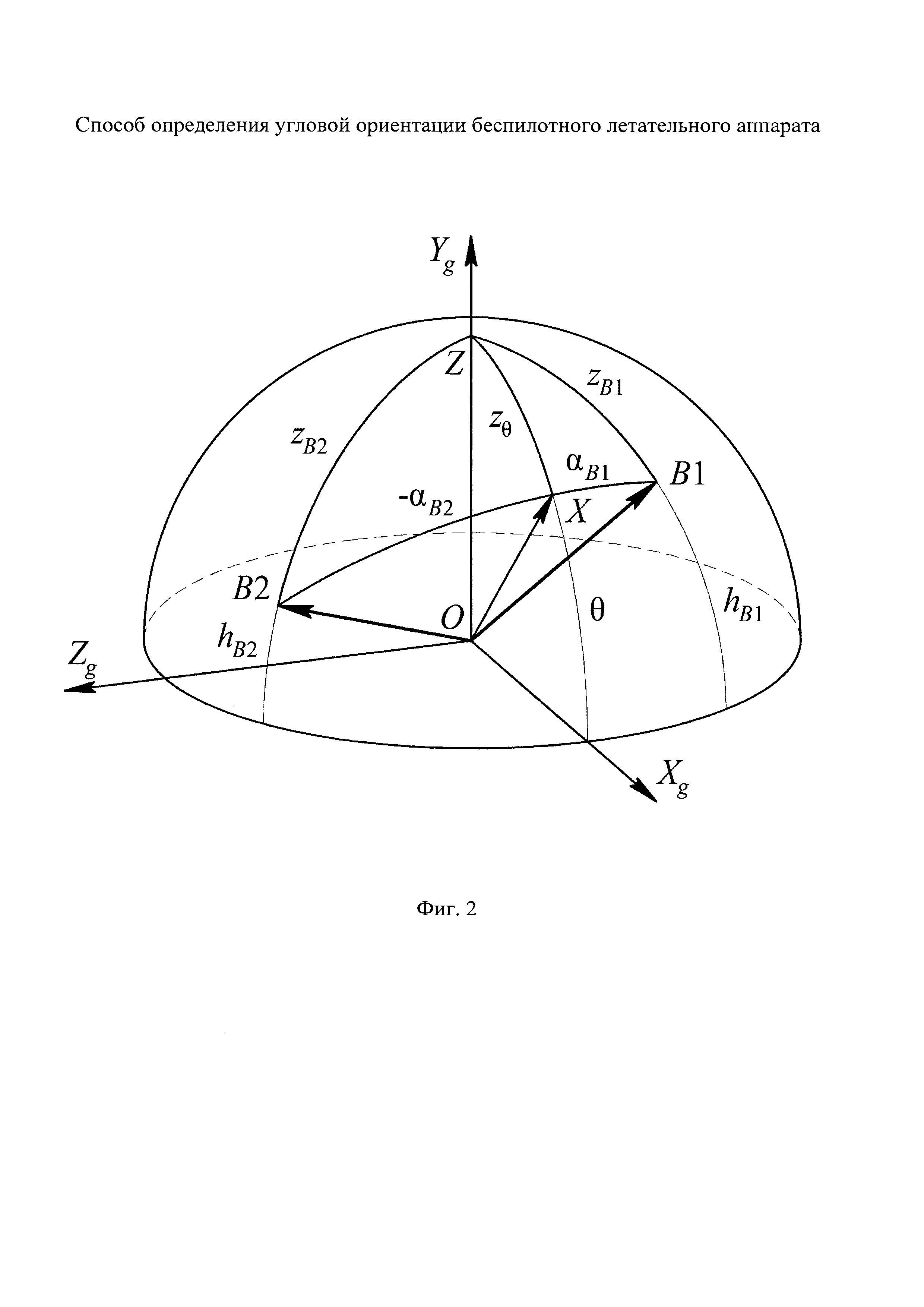
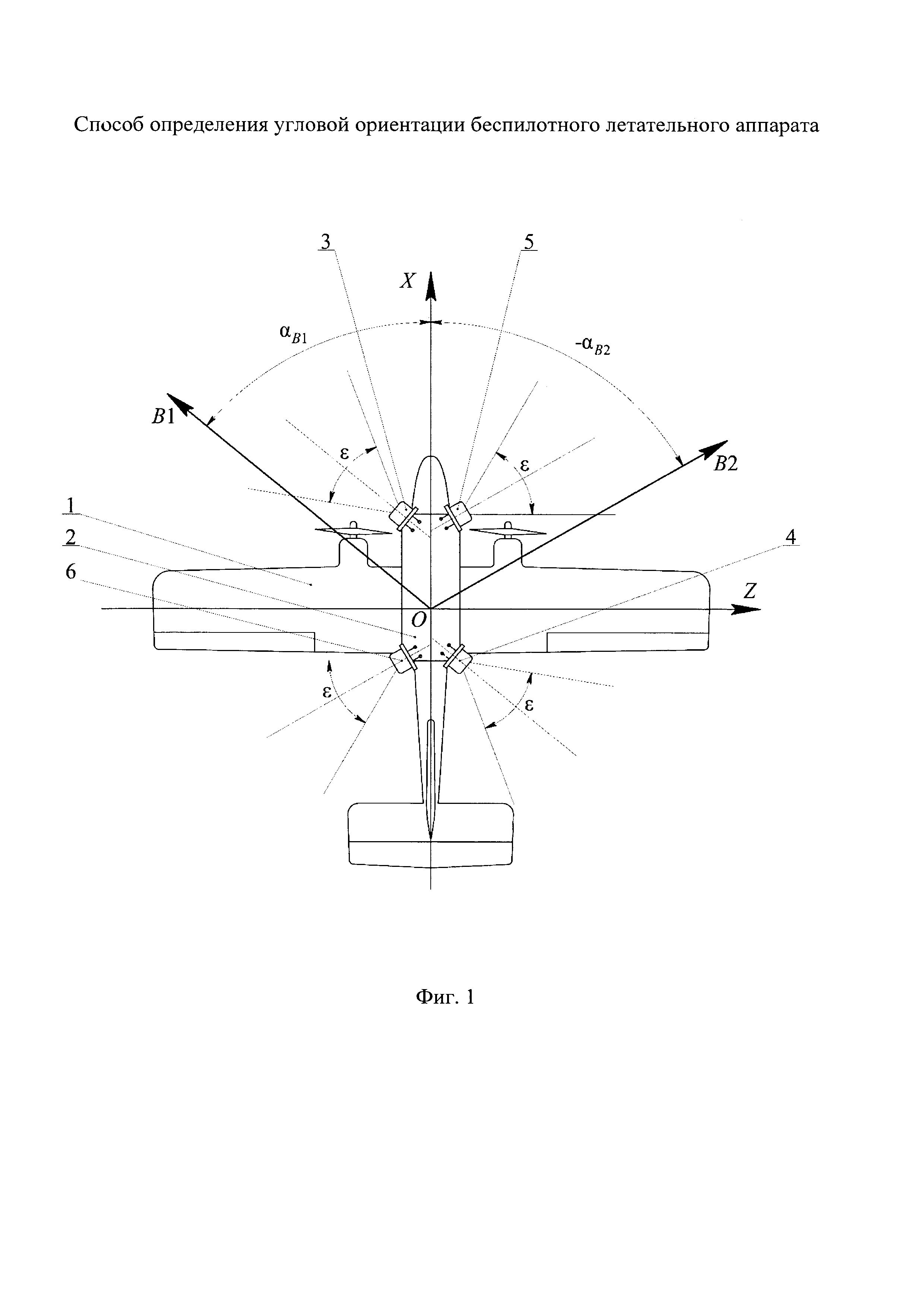
Изобретение поясняется чертежами, где на фиг. 1 представлена схема расположения пар ИК датчиков относительно фюзеляжа БПЛА самолетного типа с двумя тянущими винтами, на фиг. 2 показана ориентация оптических осей пар ИК датчиков в нормальной системе координат.
Способ определения углов тангажа и крена осуществляют следующим образом.
Лежащие в одной плоскости четыре ИК датчика группируют в две пары. ИК датчики, сгруппированные в пару, располагают на печатной плате таким образом, чтобы их оптические оси лежали в одной плоскости, были параллельны и направлены противоположно. Таким образом, пара ИК датчиков позволяет получить относительный разностный сигнал, характеризующий ее угловое положение. Поля зрения ИК датчиков, характеризуемые углом поля зрения ε, не должны перекрываться элементами конструкции БПЛА для правильного определения относительного разностного сигнала. Поэтому каждую пару ИК датчиков располагают на печатной плате под углом α к продольной оси фюзеляжа БПЛА. Угол α определяется индивидуально для каждой пары ИК датчиков, исходя из геометрического сопоставления конструкции БПЛА с углом поля зрения ИК датчика ε, так, чтобы исключить попадание источников побочного инфракрасного излучения и элементов конструкции БПЛА в поля зрения ИК датчиков. Относительные разностные сигналы пар ИК датчиков позволяют вычислить углы возвышения двух пар ИК датчиков по методике, аналогичной той, что применяется в патенте [US 6,181,989, В1, 30.01.2001] для определения углов тангажа и крена. При известных углах возвышения двух пар ИК датчиков с заданной ориентацией относительно продольной оси фюзеляжа БПЛА становится возможным определение углов тангажа и крена.
Оптические оси ИК датчиков (3), (4), (5) и (6) попарно параллельны векторам B1 и В2 (Фиг. 1). Вектор В1 параллелен оптическим осям первой пары ИК датчиков (датчик (3) и (4)), вектор В2 параллелен оптическим осям второй пары ИК датчиков (датчик (5) и (6)). Векторы В1 и В2 составляют с продольной осью БПЛА (1) углы αB1 и αB2. Знак углов определяют по правилу правой руки. Значения углов αB1 и αB2 задающих расположение пар ИК датчиков на печатной плате (2) выбирают таким образом, чтобы в угол поля зрения ε ИК датчиков не попадали моторы, крылья и элементы фюзеляжа БПЛА (1). Для определения угловой ориентации необходимо найти углы возвышения hB1 и hB2 векторов В1 и В2. Методика определенияуглов аналогична той, что представлена в патенте [US 6,181,989 В1, 30.01.2001] для определения углов тангажа и крена. В результате вычислений становятся известны углы возвышения hB1 и hB2, которые совместно с углами αB1 и αB2 являются входными параметрами для расчета углов тангажа и крена.
В сферическом треугольнике ZB1B2 (Фиг. 2) сторона ZB1 является зенитным углом вектора В1, а сторона ZB2 - зенитным углом вектора В2 соответственно.
 ,
,
 ,
,
где zB1 - зенитный угол вектора B1, hB1 - угол возвышения вектора B1, zB2 - зенитный угол вектора B2, hB2 - угол возвышения вектора B2.
Используя сферическую теорему косинусов, находят угол B1 сферического треугольника ZB1B2:
В сферическом треугольнике ZB1X сторона ZX является зенитным углом продольной оси БПЛА, а значит связана с углом тангажа следующим выражением:
ZX=zθ,
 ,
,
где zθ - зенитный угол продольной оси БПЛА.
Используя сферическую теорему косинусов, находят zθ:

Угол тангажа БПЛА определяют по следующей зависимости:

Из сферического треугольника ZB1X видно, что угол крена БПЛА равен 0 в том случае, если угол прямой, следовательно, угол крена БПЛА равен:
Используя сферическую теорему косинусов, находят угол ZXB1:

Таким образом, угол крена БПЛА равен:

Переходя от зенитных углов к углам возвышения, получают следующие зависимости для определения углов тангажа и крена БПЛА:

где hB1 - угол возвышения вектора B1, αB1 - угол между вектором B1 и продольной осью БПЛА, hB2 - угол возвышения вектора B2, а αB2 - угол между вектором B2 и продольной осью БПЛА.
Пример реализации. Для исключения попадания в поле зрения моторов и крыльев, ИК датчики с углом поля зрения ε=60° устанавливают на прямоугольной печатной плате (2) размером 400×100 мм, закрепленной на фюзеляже БПЛА (1) параллельно плоскости связанной системы координат (Фиг.). Датчики (3) и (4), образующие первую пару ИК датчиков, располагают к продольной оси фюзеляжа под углом αB1=50°, датчики (5) и (6), образующие вторую пару ИК датчиков - под углом αB2=-60°. При углах возвышения hB1=30° и hB2=-20° угол тангажа и крена БПЛА будет равен θ=10.5° и γ=30.6° соответственно.
Таким образом, результатом является создание способа повышения точности определения углов тангажа и крена БПЛА за счет исключения попадания в поле зрения ИК датчиков источников побочного инфракрасного излучения, а также перекрытия поля зрения элементами конструкции БПЛА.




Компенсационный акселерометр
Способ изготовления и конструкция стреловидной пули повышенного останавливающего действия
Устройство подачи импульсов электрического тока в зону резания при точении металлов
Способ гидроабразивной очистки поверхностей от загрязнений
Устройство возбуждения генератора и контроля качества генерируемой электрической энергии вентильно-реактивным генератором
Устройство для магнитно-импульсной штамповки
Устройство для магнитно-импульсной штамповки
Устройство для вытяжки цилиндрических оболочек из листовых металлов с плоскостной анизотропией механических свойств
Устройство для магнитно-импульсной штамповки
Устройство для магнитно-импульсной штамповки
Способ испытания образцов из материала при растяжении с повышенной температурой
Способ краткосрочного прогноза землетрясений
Абсолютный оптический однооборотный угловой энкодер
Волновой твердотельный гироскоп с металлическим резонатором

