Результат интеллектуальной деятельности: Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к системам автоматического управления беспилотными летательными аппаратами (БЛА), в частности к системам угловой стабилизации в условиях широкого диапазона изменения параметров полета по скорости, высоте полета, скоростному напору и другим параметрам.
Наиболее близким к предлагаемому изобретению способом формирования сигнала угловой стабилизации летательного аппарата (ЛА) является способ, содержащий задание сигнала углового отклонения ЛА, измерение сигнала углового положения ЛА, измерение сигнала угловой скорости, формирование цифрового сигнала рассогласования, преобразование цифрового сигнала рассогласования в аналоговый сигнал, формирование выходного сигнала суммированием преобразованного сигнала рассогласования и сигнала угловой скорости и подача его на рулевой привод ЛА [1].
Наиболее близким к предлагаемому изобретению устройством угловой стабилизации является устройство угловой стабилизации ЛА, содержащее измеритель углового положения ЛА, измеритель угловой скорости ЛА, задатчик сигнала углового отклонения ЛА, последовательно соединенные блок сравнения, цифроаналоговый преобразователь и суммирующий усилитель, второй вход которого соединен с выходом измерителя угловой скорости, рулевой привод и звено запаздывания, вход которого соединен с выходом измерителя углового положения ЛА [1].
Недостатком известных решений являются колебательность процессов, ограниченные функциональные возможности, определяемые нерациональным расходом рулей в области больших по уровню сигналов, и невысокая точность в связи с существенной нестационарностью ЛА.
Решаемой в предложенных способе и устройстве управления технической задачей является расширение функциональных возможностей системы, повышение точности, уменьшение колебательности координат процессов и повышение показателей качества управления в условиях широкого диапазона области применения, т.е. существенно нестационарным объектом - БЛА.
Указанный технический результат достигается тем, что в известный способ формирования цифроаналогового сигнала стабилизации углового положения БЛА, содержащий задание сигнала углового отклонения летательного аппарата, измерение сигнала углового положения летательного аппарата, измерение сигнала угловой скорости летательного аппарата, формирование сигнала рассогласования, преобразование сигнала рассогласования в аналоговый сигнал, формирование выходного сигнала суммированием преобразованных сигнала рассогласования и сигнала угловой скорости, формирование сигнала запаздывания относительно измеренного сигнала углового положения летательного аппарата, в него дополнительно введены измерение сигнала скоростного напора, адаптивное формирование передаточных коэффициентов К1 и К2 по аналоговому сигналу рассогласования и угловой скорости, соответственно, в обратно пропорциональной зависимости от сигнала скоростного напора, ограничения А1 сигнала запаздывания в адаптивной функции по обратно пропорциональной зависимости от сигнала скоростного напора, адаптивное формирование ограничения А2 заданного сигнала углового отклонения в функции по обратно пропорциональной зависимости от сигнала скоростного напора, при этом А2=А1, формирование сигнала рассогласования как разности между сформированными ограниченным сигналом заданного углового отклонения и ограниченным сигналом запаздывания, формирование суммарного сигнала на основе преобразованного аналогового сигнала с коэффициентом К1 и сигнала угловой скорости с коэффициентом К2, ограничение полученного суммарного сигнала с уровнем ограничения A3 в обратно пропорциональной зависимости от сигнала скоростного напора, при этом A3<(А1+А2) и составляет А3=(0,5-0,8)(А1+А2), противоизгибная фильтрация ограниченного суммарного сигнала с ограничением A3 и воздействие фильтрованного сигнала на рулевой привод.
Технический результат достигается также и тем, что в устройство стабилизации БЛА, содержащее измеритель углового положения летательного аппарата, измеритель угловой скорости летательного аппарата, задатчик сигнала углового отклонения летательного аппарата, последовательно соединенные блок сравнения и цифроаналоговый преобразователь, рулевой привод, выход которого является выходом устройства, звено запаздывания, вход которого соединен с выходом измерителя углового положения, отличающееся тем, что в него дополнительно введены последовательно соединенные измеритель скоростного напора и первый адаптивный ограничитель сигнала, второй вход которого соединен с выходом задатчика сигнала углового отклонения, а выход с первым входом блока сравнения, последовательно соединенные адаптивный суммирующий усилитель с ограничением, второй вход которого соединен с выходом измерителя угловой скорости, третий - с выходом измерителя скоростного напора, а вход - с выходом цифроаналогового преобразователя, и противоизгибный фильтр, выход которого соединен со входом рулевого привода, и второй адаптивный ограничитель сигнала, первый вход которого соединен с выходом звена запаздывания, второй - с выходом измерителя скоростного напора, а выход соединен со вторым входом блока сравнения.
Действительно, при этом решении обеспечивается отработка сигналов управления в широком диапазоне изменения параметров полета летательного аппарата, благодаря реализации сложной части устройства управления на основе бортовой цифровой вычислительной машины (БЦВМ) и сочетания с аналоговой частью.
На основе изложенных способа и устройства стабилизации предложенное решение содержит цифровую и аналоговую части, их сочетание производится цифроаналоговым преобразователем и ограничителями сигнала.
Необходимо отметить также, что прототип имеет существенный недостаток, определяемый наличием существенного перерегулирования по угловой координате и рассогласованию в управлении летательным аппаратом, что вызывает колебательность и увеличение времени переходного процесса и ограниченные функциональные возможности. Эти недостатки устраняется предложенным решением благодаря введению равных по уровню сигналов ограничений введенных адаптивных ограничителей сигнала. Функции ограничения обратно пропорциональны величине скоростного напора с целью сохранения интенсивности управления.
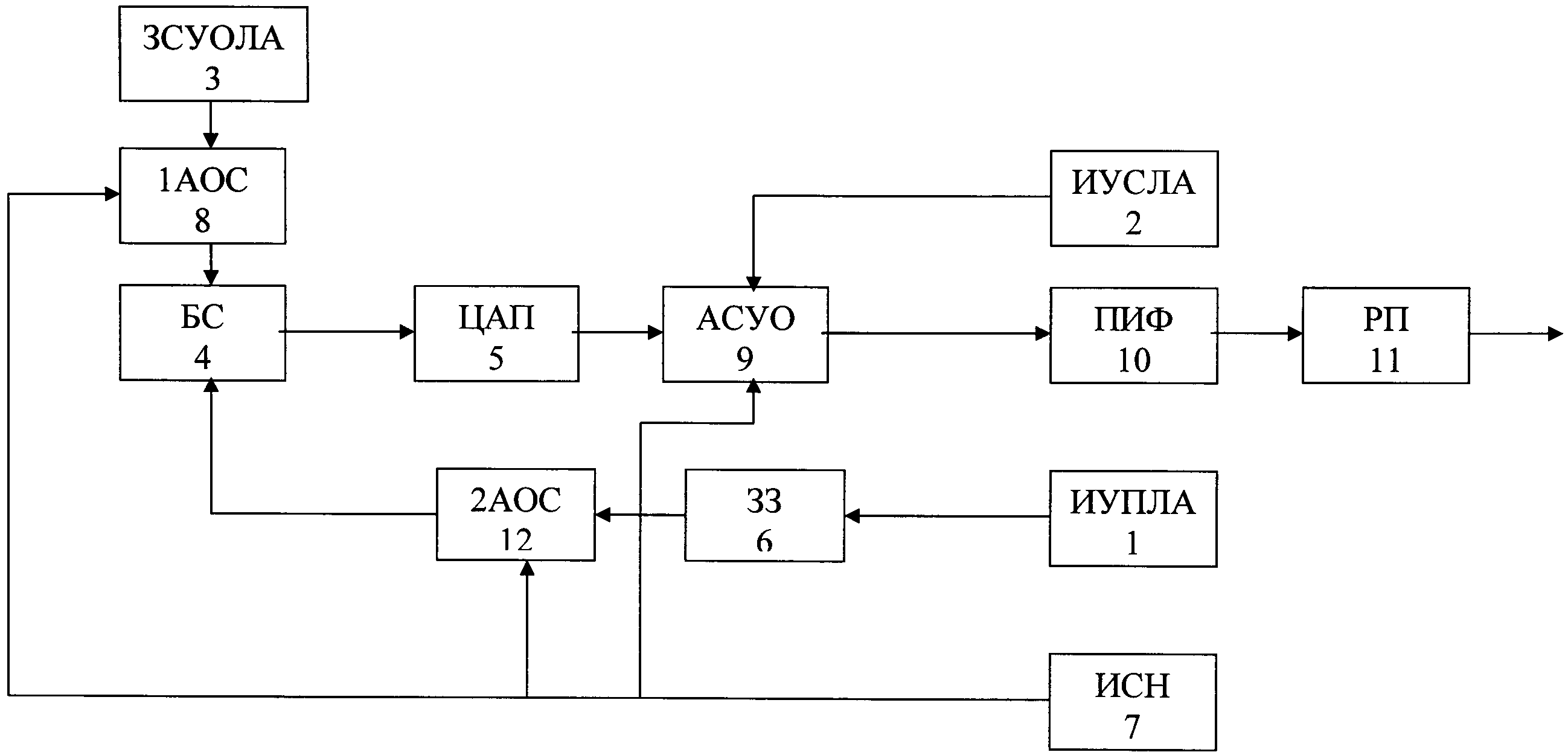
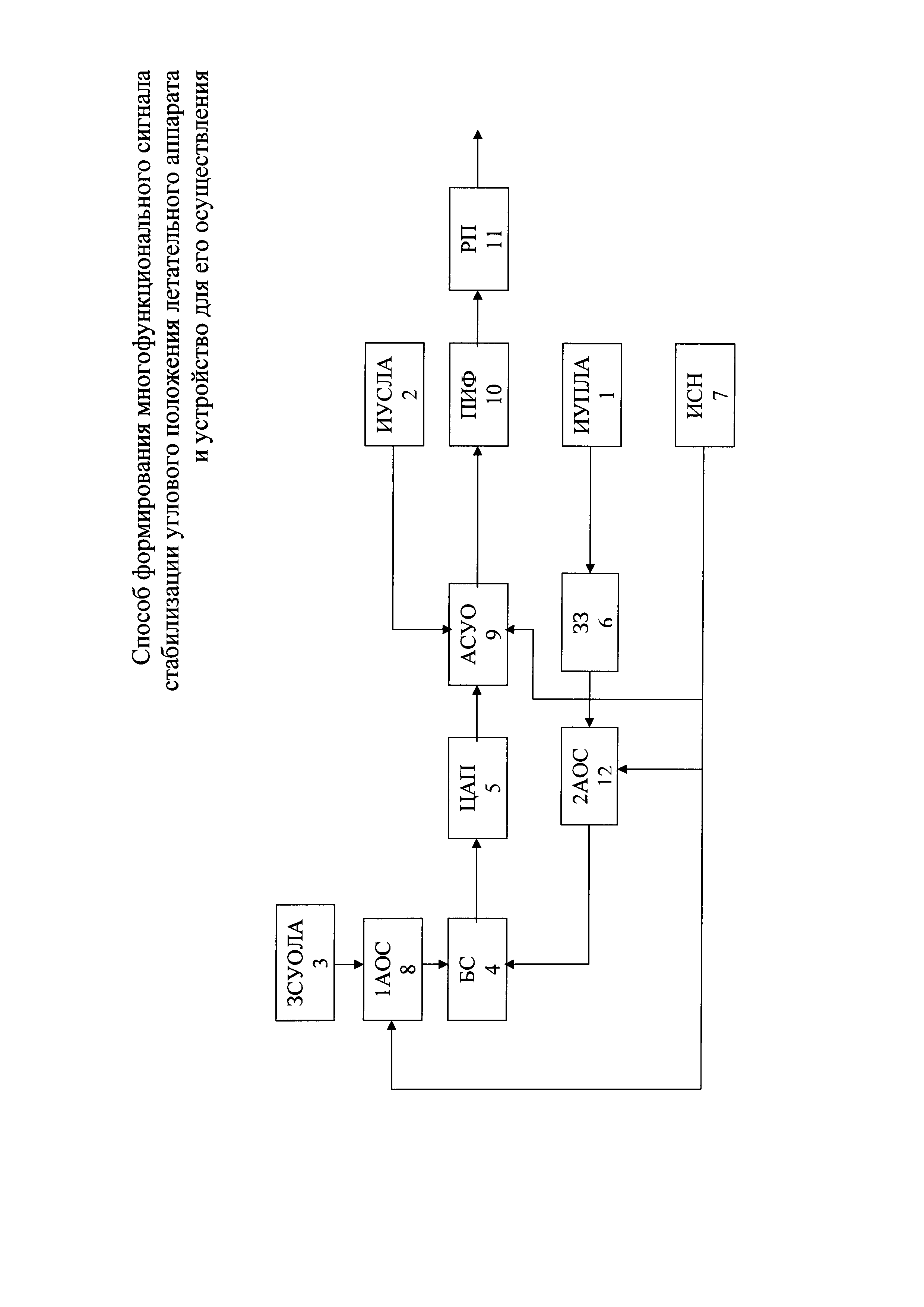
На чертеже представлена блок-схема предложенного устройства угловой стабилизации ЛА с реализацией предложенного Способа.
Устройство угловой стабилизации ЛА с реализацией Способа содержит измеритель углового положения ЛА 1 (ИУПЛА), измеритель угловой скорости ЛА 2 (ИУСЛА), задатчик сигнала углового отклонения ЛА 3 (ЗУОЛА), блок сравнения 4 (БС), цифроаналоговый преобразователь 5 (ЦАП), аналоговый суммирующий усилитель с ограничением 9 (АСУО), рулевой привод 11 (РП), звено запаздывания 6 (ЗЗ), измеритель скоростного напора 7 (ИСН), адаптивный суммирующий усилитель с ограничением 9 (АСУО), противоизгибным фильтр 10 (ПИФ), первый адаптивный ограничитель сигнала 8 (1АОС), второй адаптивный ограничитель сигнала 12 (2АОС), при этом функции ограничения первого и второго адаптивных ограничителей сигнала 8 и 12 равны между собой А2=А1, а функция ограничения сигнала A3 блока 9 меньше суммы уровней ограничений (А1+А2). При этом также вход блоков 8, 9, 12 от измерителя скоростного напора 7 - цифровой.
Аналоговая часть устройства включает в себя измеритель угловой скорости ЛА 2, противоизгибный фильтр 10, рулевой привод 12 и адаптивные усилители с ограничением сигналов в блоках 8(А2) и 12(А1) и адаптивный суммирующий усилитель с уровнем ограничения сигнала в блоке 9(А3).
Устройство с реализацией Способа работает следующим образом.
Сигнал управления σ для подачи на рулевой привод 11 формируется датчиками и блоками 1÷6, 8, 9, 12 в соответствии с законом управления:
σ=К1Δϕ+К2ωϕ,
где Δϕ - сигнал рассогласования, формируемый в блоке 4:
Δϕ=ϕ⋅е-τэзp-ϕзад,
здесь ϕзад - сигнал задающего воздействия, подается от задатчика 3;
К1, К2 - перестраиваемые в функции от скоростного напора передаточные коэффициенты блока 9.
Сигнал угла ϕ поступает от измерителя углового положения 1, сигнал угловой скорости ωϕ поступает от измерителя угловой скорости 2, сигнал задающего воздействия ϕзад формируется задатчиком угла 3. Коэффициенты K1 и К2 и сигнал σ с его ограничением формируются в усилителе 9. Сформированный сигнал фильтруется противоизгибным фильтром 10. При этом цифроаналоговый преобразователь 5 преобразует цифровой сигнал К1Δϕ в аналоговую форму. Сигнал с выхода измерителя скоростного напора 7 поступает на адаптивные блоки 8 и 12 для перестройки уровней сигналов ограничения и на блок 9 для перестройки передаточных коэффициентов К1 и К2 и уровня ограничения сигнала A3.
Рулевой привод 11 отрабатывает отфильтрованный суммарный аналоговый управляющий сигнал σф, отклоняя рулевые органы на соответствующую заданную величину δ.
Предложенные Способ и Устройство для его осуществления реализуются программно алгоритмически, а также на элементах автоматики и вычислительной техники, например, по [2, 3].
Предложенные способ формирования сигнала стабилизации углового положения нестационарного летательного аппарата и устройство для его осуществления позволяют расширить функциональные возможности устройства и повысить точность, что подтверждено результатами моделирования и натурными работами.
Источники информации
1. Патент РФ №2402057, 2009.
2. С.Б. Смолов. Функциональные преобразователи информации. Л., Энергоиздат, Ленинградское отделение, 1981.
3. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М., Машиностроение, 1981.
Способ выбора инструментального материала
Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления
Способ формирования цифроаналогового сигнала угловой стабилизации нестационарного объекта управления и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Устройство и способ концевой заделки кабеля с угловым вводом в электрический соединитель
Способ формирования отказоустойчивой вычислительной системы и отказоустойчивая вычислительная система
Способ формирования 4-канальной отказоустойчивой системы бортового комплекса управления повышенной живучести и эффективного энергопотребления и его реализация для космических применений
Способ определения момента времени окончания маневра и отсечки маршевого двигателя разгонного блока
Способ ориентации солнечной батареи космического аппарата по току
Способ управления положением солнечной батареи космического аппарата при частичных отказах датчика угла
Способ выбора инструментального материала
Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления
Способ формирования цифроаналогового сигнала угловой стабилизации нестационарного объекта управления и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ гидроструйной обработки поверхности изделий из режущей керамики
Способ получения армированного термопластичного композиционного материала и армированный термопластичный композиционный материал
Способ формирования интегрального сигнала управления для систем автоматического регулирования и устройство для его осуществления
Способ ориентации в пространстве осей связанной системы координат космического аппарата
Адаптивное устройство формирования сигнала управления продольно-балансировочным движением летательного аппарата
Способ калибровки импульса тяги маршевого двигателя

