Результат интеллектуальной деятельности: Система тактильной обратной связи, способ и устройство управления, блок дисплея и электронное устройство
Вид РИД
Изобретение
Перекрестные ссылки на связанные заявки
[0001] По настоящей заявке испрашивается приоритет согласно заявке на патент Китайской Народной Республики №201310068307.0, поданной 4 марта 2013 г., содержание которой полностью включено в настоящий документ путем ссылки и на основе которой подана настоящая заявка.
Область техники
[0002] Настоящее изобретение относится к области экранов дисплеев и, более конкретно, к системе тактильной обратной связи, пригодной для гибкого сенсорного экрана, способу управления, устройству управления, блоку дисплея и электронному устройству.
Предпосылки создания изобретения
[0003] Сенсорный экран дисплея представляет собой внешнюю часть, которая наиболее часто используется в мобильном терминале, таком как мобильный телефон, планшетный компьютер и устройство для чтения электронных книг. Сенсорный экран дисплея может не только отображать информацию для пользователя, но также может обеспечивать для пользователя функцию сенсорного ввода.
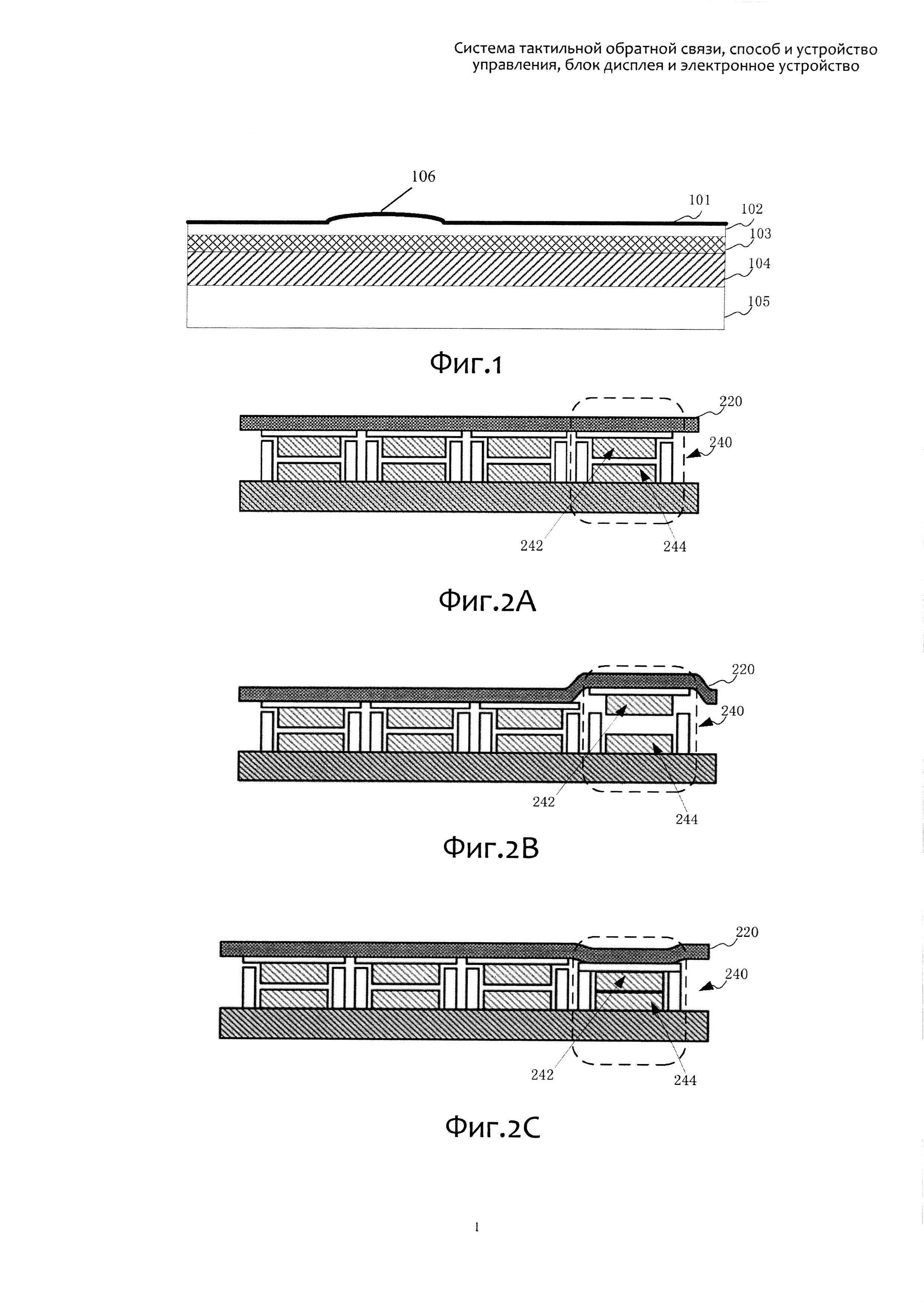
[0004] Поскольку сенсорный экран дисплея обычно представляет собой негибкий экран, пользователь при использовании функции сенсорного ввода сенсорного экрана дисплея может выполнять только такие операции как постукивание, скольжение, перетаскивание и касание несколькими пальцами на плоской и негибкой внешней поверхности сенсорного экрана дисплея, при этом самым большим недостатком такого сенсорного экрана дисплея является отсутствие тактильной обратной связи. Однако с развитием технологии сенсорного экрана дисплея в последние годы гибкий сенсорный экран дисплея постепенно выдвинулся вперед, таким образом, появилось устройство сенсорного дисплея, содержащее систему тактильной обратной связи. Как показано на фиг. 1, которая поясняет структурную схему устройства сенсорного дисплея, содержащего систему тактильной обратной связи, устройство сенсорного дисплея содержит пластиковый гибкий слой 101, заряженную жидкую среду 102, пластиковый негибкий слой 103, панель 104 жидкокристаллического дисплея (Liquid Crystal Display, LCD) и внутренний компонент 105 для поддержки отображения на LCD, которые расположены в одном корпусе последовательно от внешней стороны к внутренней стороне. При этом и пластиковый гибкий слой 101, функционирующий как сенсорный слой, и пластиковый негибкий слой 103, функционирующий как слой отображения, снабжаются проводящими контурами и узлами, которые подобны двум обкладкам конденсатора. Когда некоторая область экрана заряжается, заряженная жидкая среда 102 будет притягиваться и агрегироваться, таким образом, становясь способной к порождению объемного расширения внутренней области экрана, так что образуется выступ 106 в соответствующем месте пластикового гибкого слоя 101. Пользователь может тактильно ощущать касание, подобное касанию к кнопке при выполнении сенсорной операции на выступе 106. Кроме того, когда выступ 106 нажат, напряжение структуры, подобной конденсатору, образуемому пластиковым гибким слоем 101 и пластиковым негибким слоем 103, будет изменено, таким образом можно получать двухпозиционный управляющий сигнал и подавать этот сигнал обратно в систему.
[0005] В процессе реализации настоящего изобретения было найдено, что известный уровень техники имеет по меньшей мере следующие недостатки: поскольку для осуществления тактильной обратной связи используется заряженная жидкая среда, то время реакции для создания деформации на сенсорном экране дисплея является относительно длительным. То есть, когда пользователь выполняет сенсорную операцию на сенсорном экране дисплея, если отображаемая информация на экране изменяется, то необходимо относительно много времени для завершения процесса обновления деформации на сенсорном экране дисплея.
Сущность изобретения
[0006] Чтобы преодолеть проблему длительного времени реакции при реализации системы тактильной обратной связи с использованием заряженной жидкой среды, варианты осуществления настоящего изобретения предлагают систему тактильной обратной связи, пригодную для гибкого сенсорного экрана, а также способ и устройство управления, блок дисплея и электронное устройство. Технические решения приводятся ниже.
[0007] Согласно первому аспекту настоящего изобретения предлагается система тактильной обратной связи, содержащая:
[0008] по меньшей мере один блок тактильной обратной связи, расположенный под гибким сенсорным экраном;
[0009] причем блок тактильной обратной связи содержит якорную часть и катушечную часть, при этом по меньшей мере одна из упомянутых частей выполнена подвижной, а начальный зазор между якорной частью и катушечной частью равняется заранее заданному значению; и
[0010] когда на катушечную часть подается питание, зазор между якорной частью и катушечной частью изменяется под электромагнитным воздействием, причем измененный зазор становится больше или меньше чем заранее заданное значение, так что выступ или углубление образуется в соответствующем месте гибкого сенсорного экрана.
[0011] В одном варианте осуществления, когда на катушечную часть подается питание положительным током, зазор между якорной частью и катушечной частью изменяется до первого значения под электромагнитным воздействием, причем первое значение больше заранее заданного значения, так что выступ образуется в соответствующем месте гибкого сенсорного экрана; и
[0012] когда на катушечную часть подается питание отрицательным током, зазор между якорной частью и катушечной частью изменяется до второго значения под электромагнитным воздействием, причем второе значение меньше чем заранее заданное значение, так что углубление образуется в соответствующем месте гибкого сенсорного экрана.
[0013] В одном варианте осуществления число блоков тактильной обратной связи равно двум или более, причем блоки тактильной обратной связи мозаично расположены под всей областью или частичной областью гибкого сенсорного экрана, и форма проекции каждого блока тактильной обратной связи на панели гибкого сенсорного экрана представляет собой многоугольник;
[0014] причем многоугольник представляет собой квадрат и/или правильный шестиугольник.
[0015] В одном варианте осуществления блоки тактильной обратной связи мозаично расположены на многоуровневых панелях, прилегающих друг к другу сверху донизу под всей областью или частичной областью гибкого сенсорного экрана, и форма проекции блока тактильной обратной связи, расположенного на нижнем уровне на панели гибкого сенсорного экрана, больше или равна форме проекции блока тактильной обратной связи, расположенного на верхнем уровне на панели гибкого сенсорного экрана.
[0016] В одном варианте осуществления один или более блоков тактильной обратной связи является одним из следующих четырех блоков тактильной обратной связи:
[0017] блок тактильной обратной связи первого типа, содержащий корпус, неподвижную катушечную часть в нижней части корпуса и подвижную якорную часть в верхней части корпуса, причем якорная часть представляет собой электромагнит или постоянный магнит и связана с катушечной частью посредством пружины;
[0018] блок тактильной обратной связи второго типа, содержащий корпус, полую неподвижную катушечную часть в нижней части корпуса и подвижную цилиндрическую якорную часть в полости полой катушечной части, причем цилиндрическая якорная часть представляет собой электромагнит или постоянный магнит, и нижняя часть цилиндрической якорной части связана с корпусом посредством пружины;
[0019] блок тактильной обратной связи третьего типа, содержащий корпус, неподвижную якорную часть в нижней части корпуса и подвижную катушечную часть в верхней части корпуса, причем якорная часть представляет собой постоянный магнит и связана с катушечной частью посредством пружины; и
[0020] блок тактильной обратной связи четвертого типа, содержащий корпус, полую неподвижную якорную часть в нижней части корпуса и подвижную цилиндрическую катушечную часть в полости полой якорной части, причем полая якорная часть представляет собой постоянный магнит, и нижняя часть цилиндрической катушечной части связана с корпусом посредством пружины.
[0021] Согласно второму аспекту настоящего изобретения предлагается способ управления системой тактильной обратной связи, которая применяется в электронном устройстве, содержащем гибкий экран дисплея и систему тактильной обратной связи согласно какой-либо из вышеупомянутого первого аспекта и различным предпочтительным решениям первого аспекта, включающий:
[0022] обнаружение, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок; и
[0023] если результатом обнаружения является то, что отображаемое изображение представляет собой заранее заданное изображение, подачу питания на блок тактильной обратной связи под местоположением отображаемого изображения, так чтобы под электромагнитным воздействием изменить зазор между якорной частью и катушечной частью в блоке тактильной обратной связи.
[0024] В одном варианте осуществления перед подачей питания на блок тактильной обратной связи под местоположением отображаемого изображения способ также включает:
[0025] запрос параметра тока, соответствующего отображаемому изображению, из заранее сохраненной соответствующей зависимости между заранее заданным изображением и параметром тока согласно отображаемому изображению, причем параметр тока включает направление тока и значение тока;
[0026] при этом подача питания на блок тактильной обратной связи под местоположением отображаемого изображения включает:
[0027] подачу питания на блок тактильной обратной связи под местоположением отображаемого изображения согласно запрошенному параметру тока, соответствующему отображаемому изображению.
[0028] В одном варианте осуществления после подачи питания на блок тактильной обратной связи под местоположением отображаемого изображения способ также включает:
[0029] обнаружение, изменился ли ток; и
[0030] если результатом обнаружения является то, что ток изменился, изменение отображаемого изображения на гибком сенсорном экране согласно величине изменения тока.
[0031] В одном варианте осуществления после подачи питания на блок тактильной обратной связи под местоположением отображаемого изображения способ также включает:
[0032] обнаружение, изменился ли ток; и
[0033] если результатом обнаружения является то, что ток изменился, регулировку тока согласно величине изменения тока.
[0034] В одном варианте осуществления перед регулировкой тока согласно величине изменения тока способ также включает:
[0035] запрос параметра тока, соответствующего величине изменения тока, из заранее сохраненной соответствующей зависимости между величиной изменения тока и параметром тока согласно величине изменения тока, причем параметр тока включает направление тока и значение тока;
[0036] при этом регулировка тока согласно величине изменения тока включает:
[0037] регулировку тока согласно запрошенному параметру тока, соответствующему величине изменения тока.
[0038] Согласно третьему аспекту настоящего изобретения предлагается устройство для управления системой тактильной обратной связи, которое применяется в электронном устройстве, содержащем гибкий экран дисплея и систему тактильной обратной связи согласно первому аспекту, содержащее:
[0039] модуль обнаружения изображения, сконфигурированный для обнаружения, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок; и
[0040] модуль управления блоком, сконфигурированный для подачи питания на блок тактильной обратной связи под местоположением отображаемого изображения, так чтобы под электромагнитным воздействием изменился зазор между якорной частью и катушечной частью в блоке тактильной обратной связи, если результатом обнаружения модулем обнаружения изображения является то, что отображаемое изображение представляет собой заранее заданное изображение.
[0041] В одном варианте осуществления устройство также содержит модуль запроса изображения;
[0042] причем модуль запроса изображения, сконфигурированный для запроса параметра тока, соответствующего отображаемому изображению, обнаруженному модулем обнаружения изображения из заранее сохраненной соответствующей зависимости между заранее заданным изображением и параметром тока согласно отображаемому изображению, причем параметр тока включает направление тока и значение тока;
[0043] при этом модуль управления блоком сконфигурирован для подачи питания на блок тактильной обратной связи под местоположением отображаемого изображения согласно параметру тока, соответствующему отображаемому изображению, запрашиваемому модулем запроса изображения.
[0044] В одном варианте осуществления устройство также содержит:
[0045] модуль обнаружения тока и модуль регулировки отображения;
[0046] причем модуль обнаружения тока сконфигурирован для обнаружения, изменился ли ток, подаваемый модулем управления блоком;
[0047] а модуль регулировки отображения сконфигурирован для изменения отображаемого изображения на гибком сенсорном экране согласно величине изменения тока, если результатом обнаружения модулем обнаружения тока является то, что ток изменился.
[0048] В одном варианте осуществления устройство также содержит:
[0049] модуль обнаружения тока и модуль регулировки тока;
[0050] причем модуль обнаружения тока сконфигурирован для обнаружения, изменился ли ток, подаваемый модулем управления блоком;
[0051] а модуль регулировки тока сконфигурирован для регулировки тока согласно величине изменения тока, если результатом обнаружения модулем обнаружения тока является то, что ток изменился.
[0052] В одном варианте осуществления устройство также содержит модуль запроса изменения;
[0053] причем модуль запроса изменения, сконфигурированный для запроса параметра тока, соответствующего величине изменения тока, обнаруженной модулем обнаружения тока, из заранее сохраненной соответствующей зависимости между величиной изменения тока и параметром тока согласно величине изменения тока, при этом параметр тока включает направление тока и значение тока;
[0054] причем модуль регулировки тока сконфигурирован для регулировки тока согласно параметру тока, соответствующему величине изменения тока, запрашиваемой модулем запроса изменения.
[0055] Согласно четвертому аспекту настоящего изобретения предлагается блок дисплея, содержащий гибкий экран дисплея и систему тактильной обратной связи согласно какой-либо из вышеупомянутого первого аспекта и различным предпочтительным решениям первого аспекта.
[0056] Согласно пятому аспекту настоящего изобретения предлагается электронное устройство, содержащее гибкий экран дисплея, систему тактильной обратной связи согласно какой-либо из вышеупомянутого первого аспекта и различным предпочтительным решениям первого аспекта, и устройство для управления системой тактильной обратной связи согласно какому-либо из третьего аспекта и различным предпочтительным решениям третьего аспекта.
[0057] Технические решения, обеспечиваемые вариантами осуществления настоящего изобретения, могут обеспечивать следующие положительные эффекты:
[0058] настоящее изобретение осуществляет физическую обратную связь гибкого сенсорного экрана посредством блока тактильной обратной связи, содержащего якорную часть и катушечную часть, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи с использованием заряженной жидкой среды, а также позволяет достичь эффекта быстрого физического деформирования гибкого сенсорного экрана путем простой подачи питания на катушку и значительно сократить время реагирования.
[0059] Следует понимать, что и предшествующее описание сущности изобретения, и последующее подробное описание изобретения приводятся только в качестве примера и для пояснения и не ограничивают изобретение.
Краткое описание чертежей
[0060] Для более полного объяснения технических решений в вариантах осуществления изобретения, чертежи, используемые в описании вариантов осуществления изобретения, будут вводиться в дальнейшем. Очевидно, что чертежи, описываемые ниже, представляют собой конкретные варианты осуществления изобретения, и специалист в данной области техники также может получить другие чертежи согласно этим чертежам без выполнения изобретательской работы.
[0061] На фиг. 1 показана структурная схема сенсорного устройства отображения, содержащего систему тактильной обратной связи.
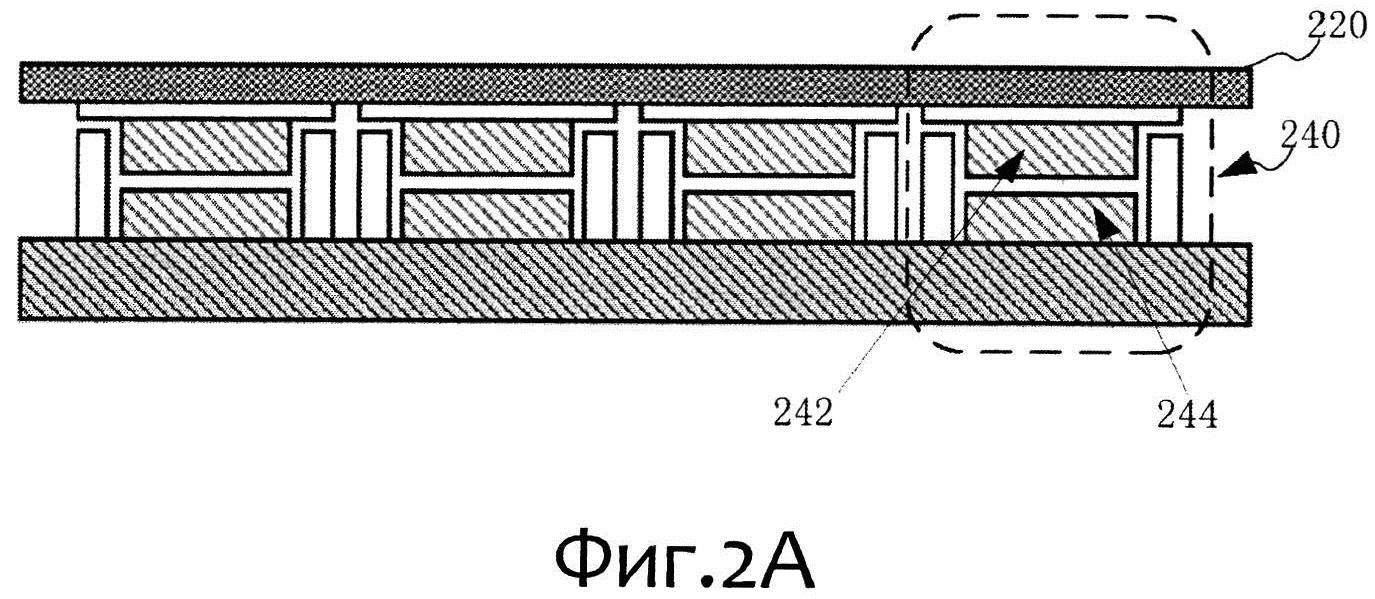
[0062] На фиг. 2А показана структурная схема системы тактильной обратной связи, предлагаемой первым вариантом осуществления настоящего изобретения.
[0063] На фиг. 2В показана структурная схема системы тактильной обратной связи, предлагаемой первым вариантом осуществления настоящего изобретения, при формировании выступа.
[0064] На фиг. 2С показана структурная схема системы тактильной обратной связи, предлагаемой первым вариантом осуществления настоящего изобретения, при формировании углубления.
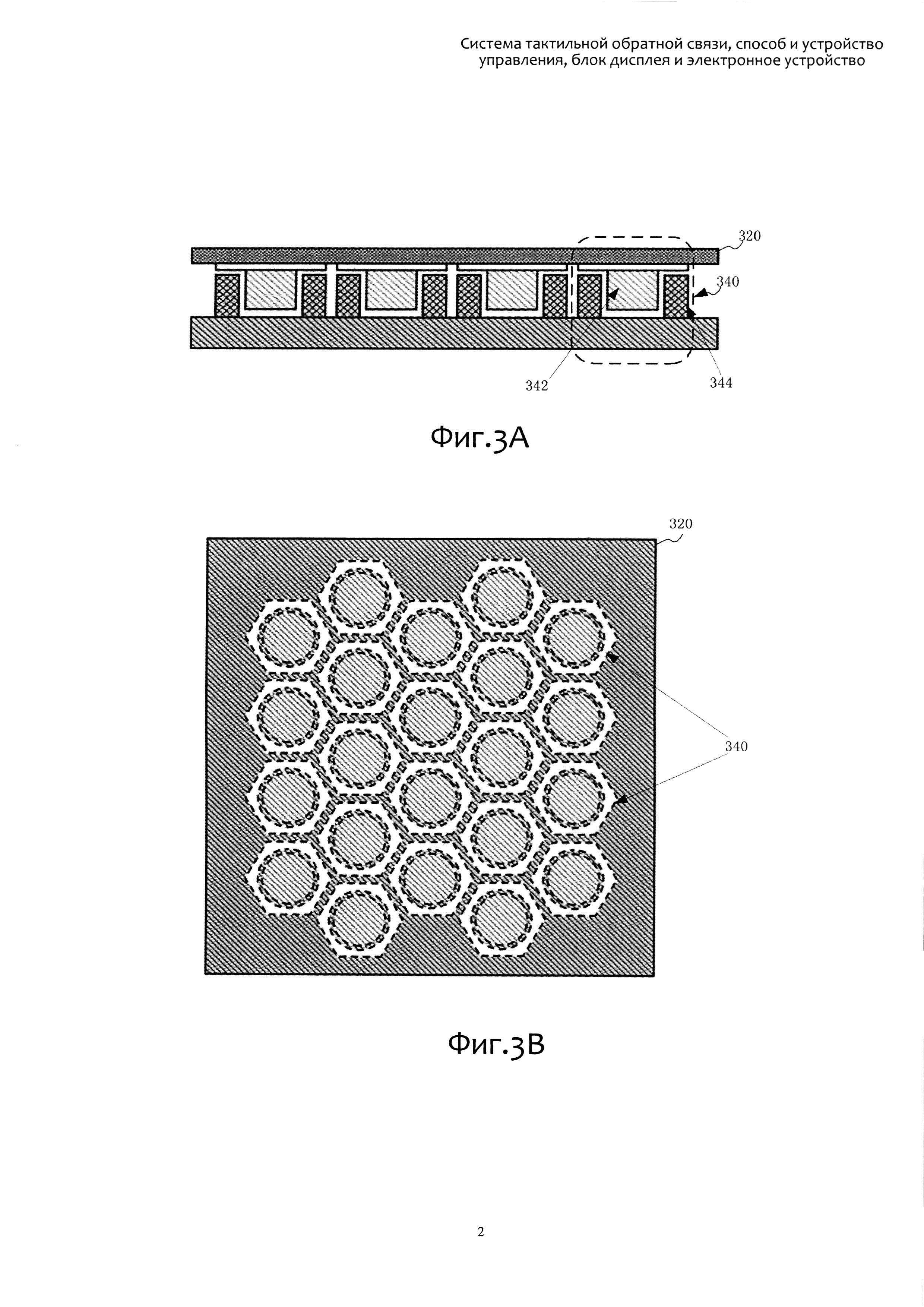
[0065] На фиг. 3А показана структурная схема системы тактильной обратной связи, предлагаемой вторым вариантом осуществления настоящего изобретения.
[0066] На фиг. 3В показана мозаичная схема блока тактильной обратной связи, предлагаемого вторым вариантом осуществления настоящего изобретения.
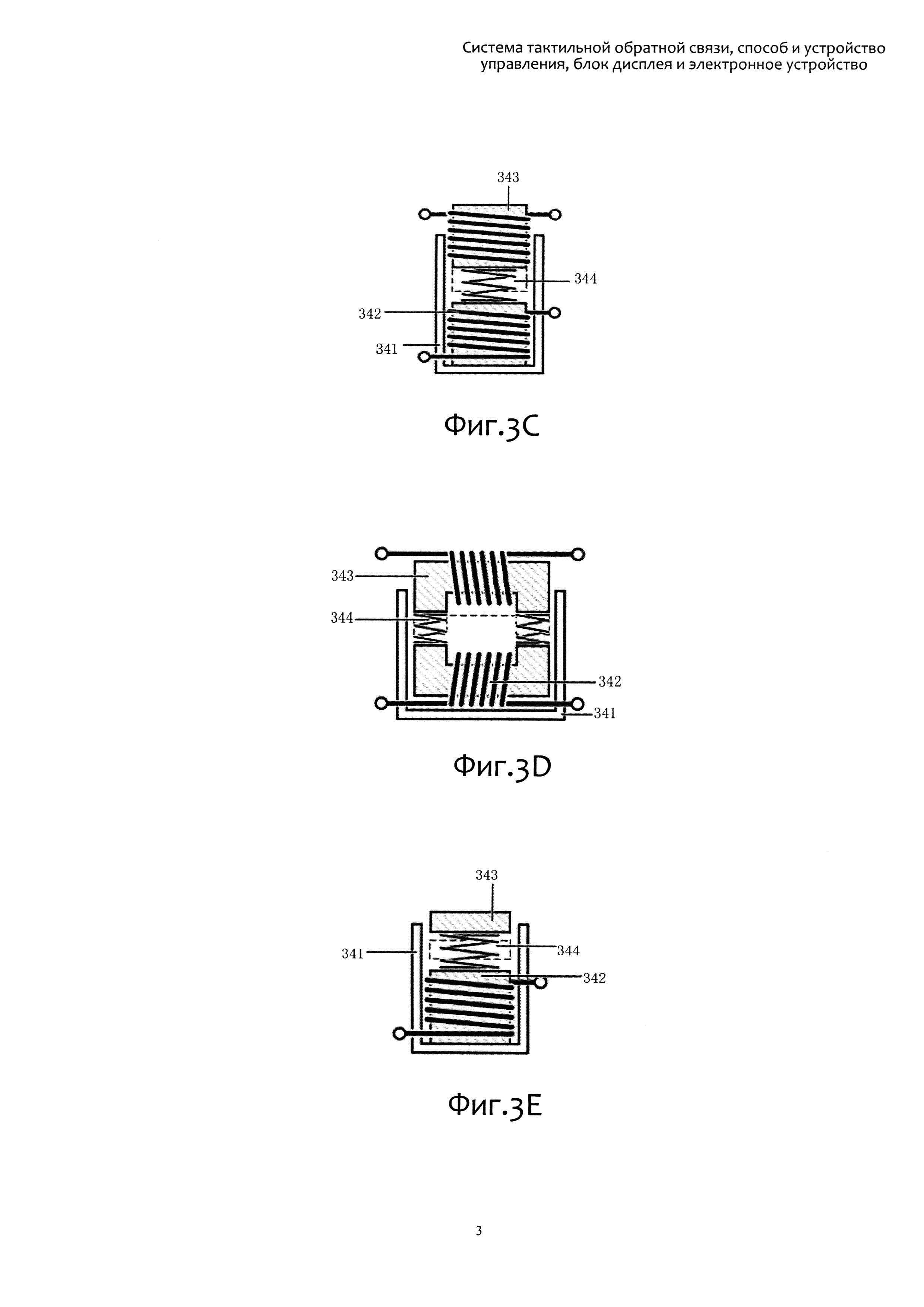
[0067] На фиг. 3C-3F показаны четыре структурные схемы блока тактильной обратной связи первого типа, предлагаемого вторым вариантом осуществления настоящего изобретения.
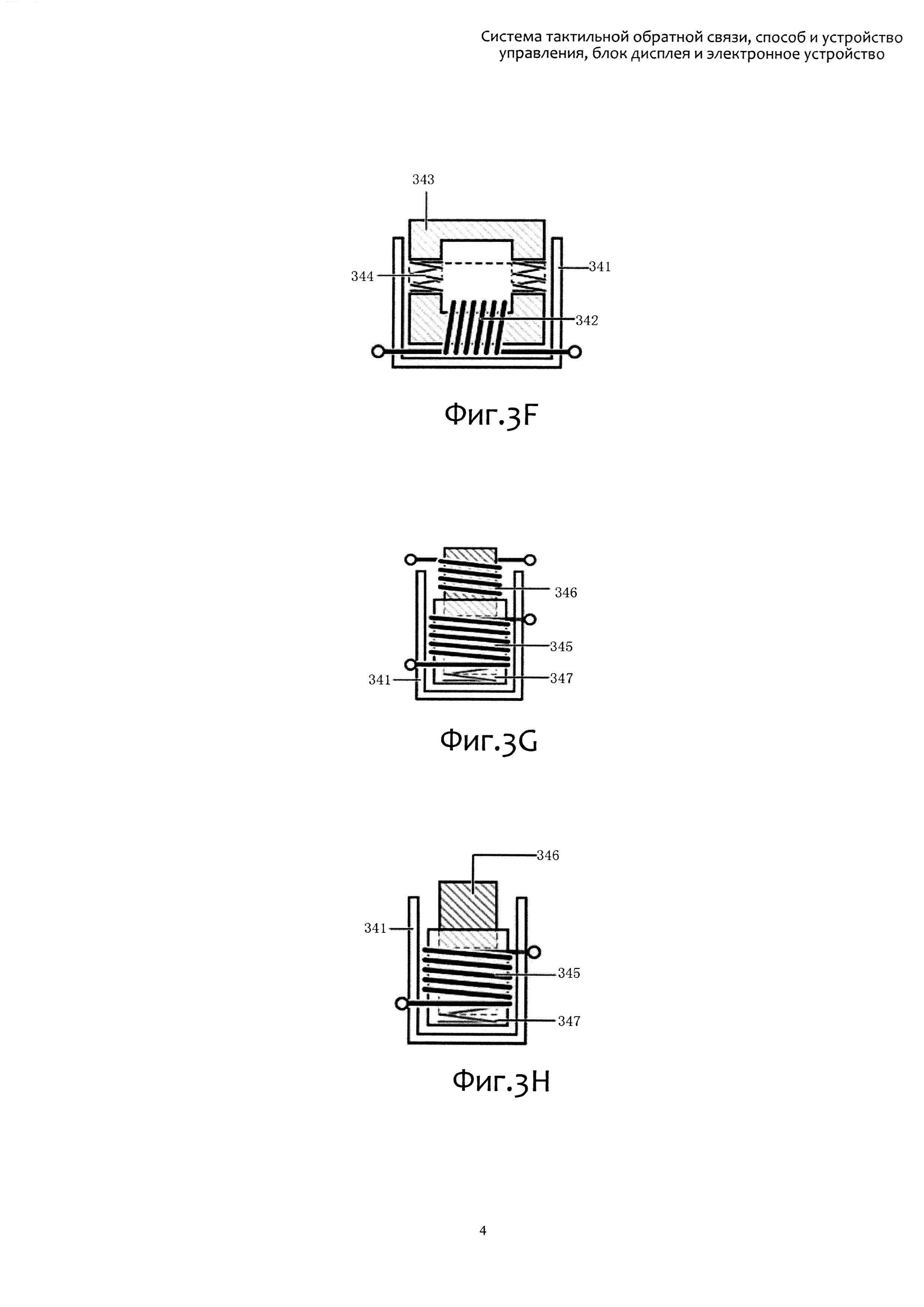
[0068] На фиг. 3G и 3F показаны две структурные схемы блока тактильной обратной связи второго типа, предлагаемого вторым вариантом осуществления настоящего изобретения.
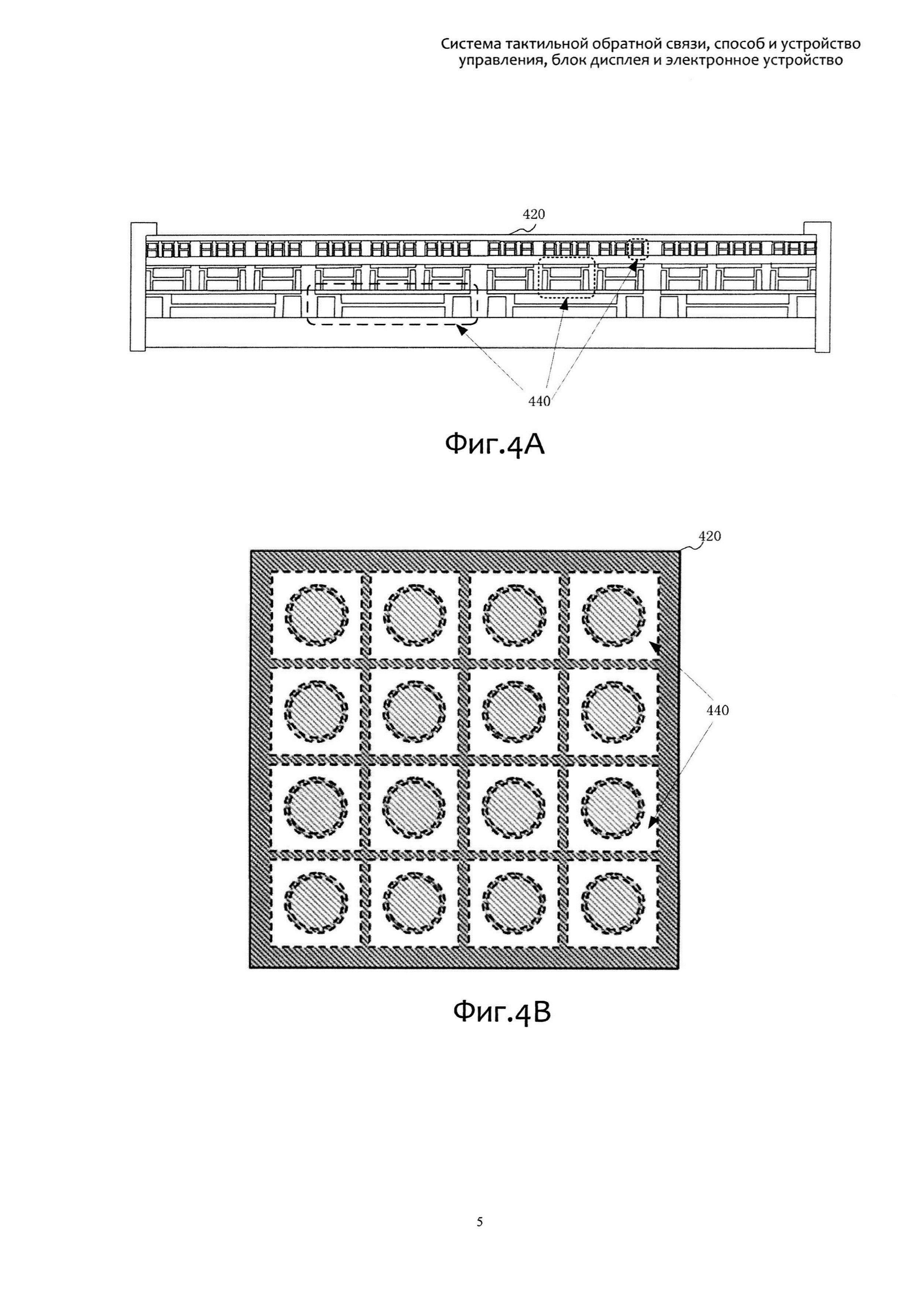
[0069] На фиг. 4А показана структурная схема системы тактильной обратной связи, предлагаемой третьим вариантом осуществления настоящего изобретения.
[0070] На фиг. 4В показана мозаичная схема блока тактильной обратной связи, предлагаемого третьим вариантом осуществления настоящего изобретения.
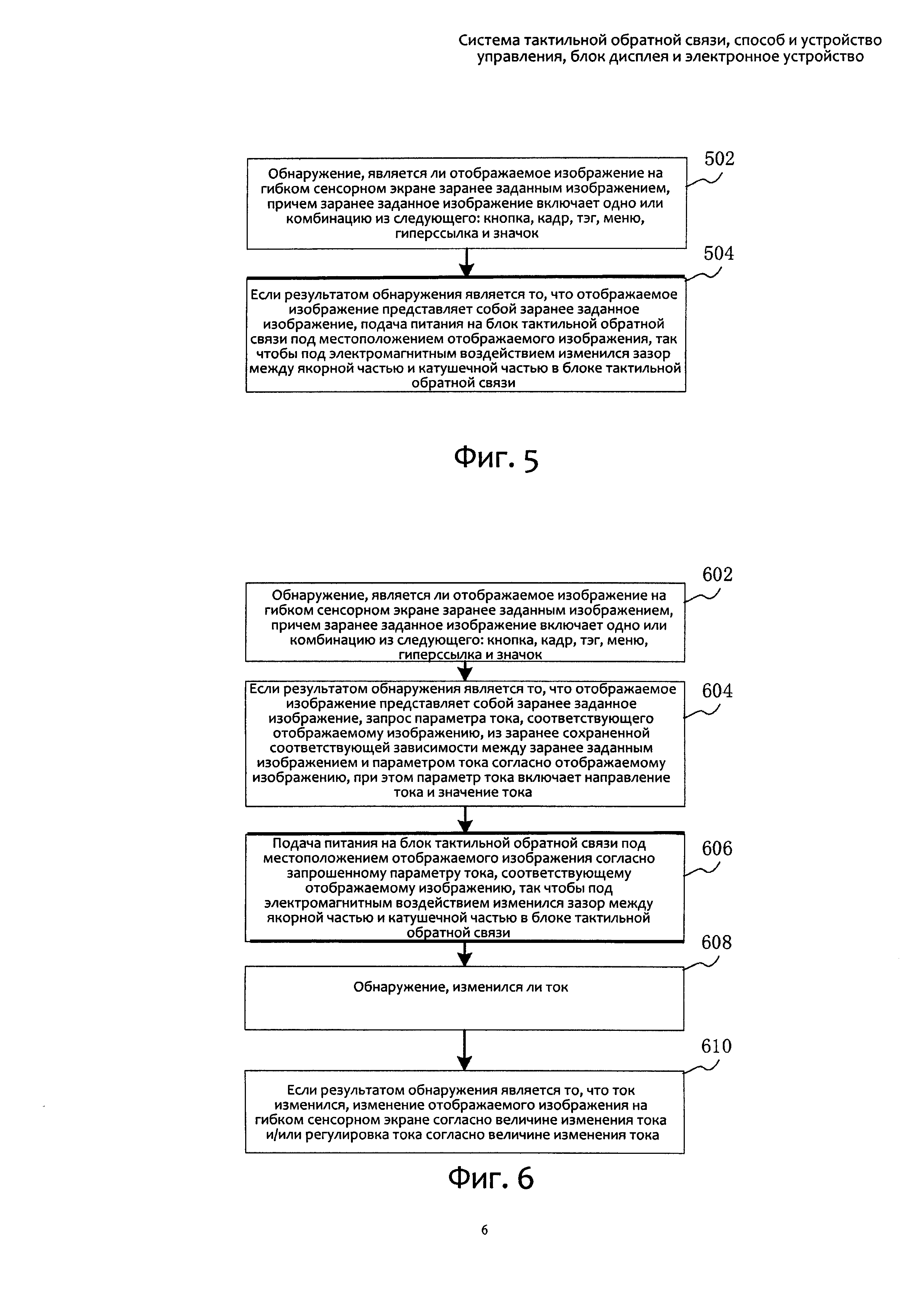
[0071] На фиг. 5 показан алгоритм способа управления системой тактильной обратной связи, предлагаемого четвертым вариантом осуществления настоящего изобретения.
[0072] На фиг. 6 показан алгоритм способа управления системой тактильной обратной связи, предлагаемого пятым вариантом осуществления настоящего изобретения.
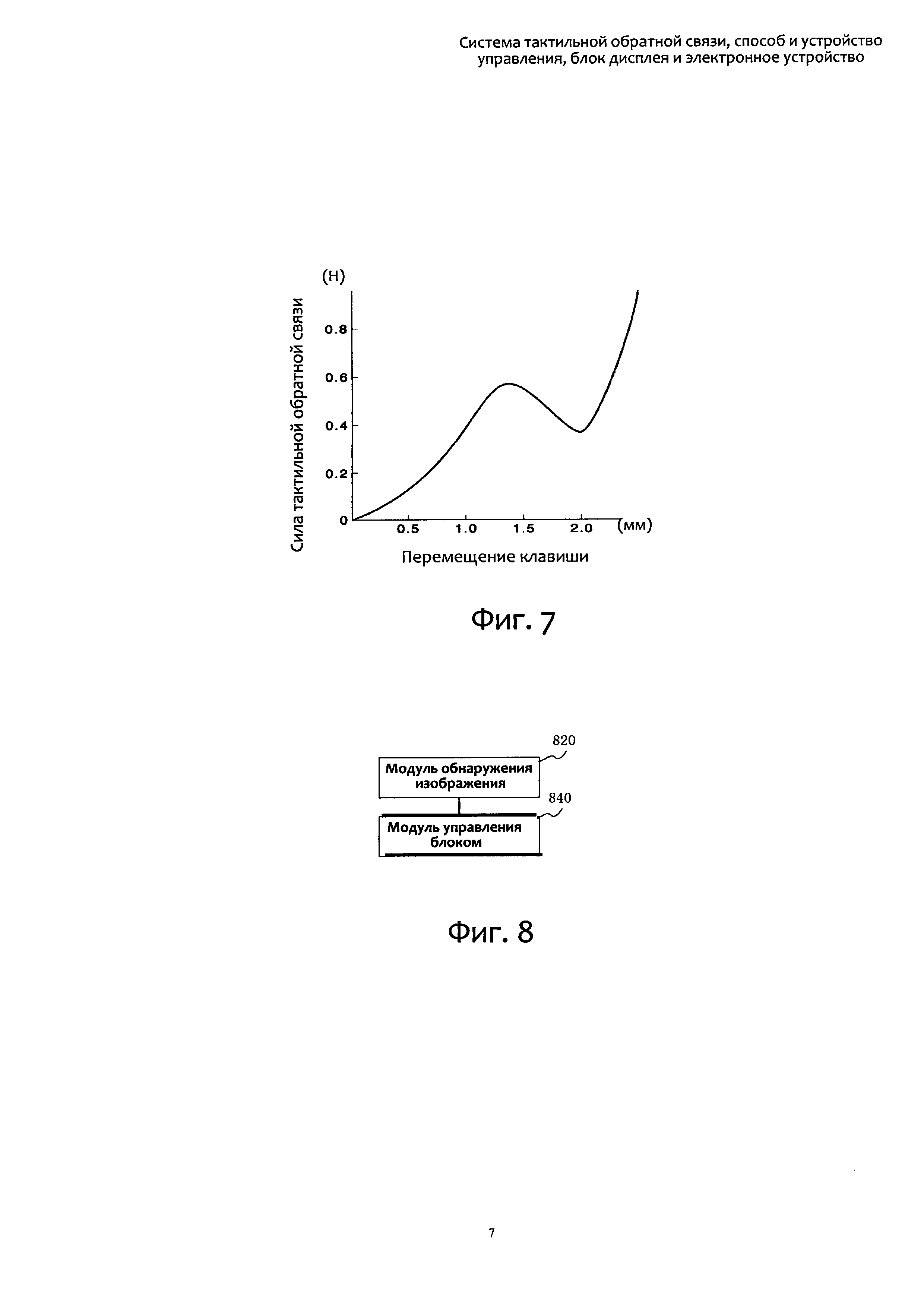
[0073] На фиг. 7 показана схема соотношения перемещения клавиши и силы тактильной обратной связи для фактической физической клавиши, используемой в пятом варианте осуществления настоящего изобретения.
[0074] На фиг. 8 показана блок-схема устройства для управления системой тактильной обратной связи, предлагаемого шестым вариантом осуществления настоящего изобретения.
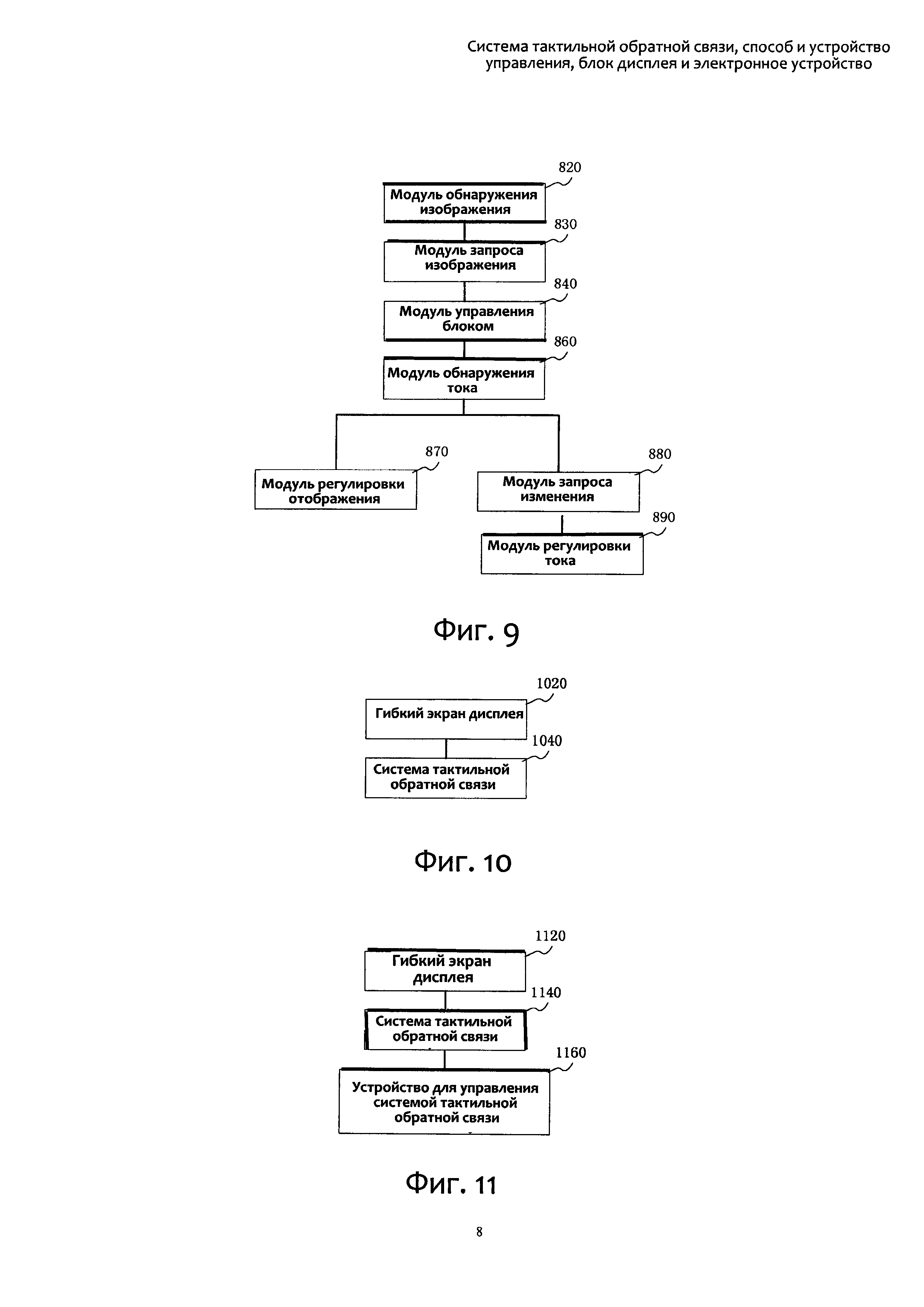
[0075] На фиг. 9 показана блок-схема устройства для управления системой тактильной обратной связи, предлагаемого шестым вариантом осуществления настоящего изобретения.
[0076] На фиг. 10 показана блок-схема блока дисплея, предлагаемого седьмым вариантом осуществления настоящего изобретения.
[0077] На фиг. 11 показана блок-схема электронного устройства, предлагаемого восьмым вариантом осуществления настоящего изобретения.
Подробное описание изобретения
[0078] Чтобы сделать цели, технические решения и преимущества настоящего изобретения более понятными, примеры осуществления настоящего изобретения будут подробно описаны ниже со ссылкой на приложенные чертежи.
[0079] Первый вариант осуществления изобретения.
[0080] Как показано на фиг. 2А, которая поясняет структурную схему системы тактильной обратной связи, предлагаемой первым вариантом осуществления настоящего изобретения, система тактильной обратной связи может быть реализована как часть электронного устройства, содержащего гибкий сенсорный экран. Электронное устройство может быть одним из следующего: смартфон, планшетный компьютер, устройство для чтения электронных книг, портативный компьютер или настольный дисплей. Система тактильной обратной связи содержит по меньшей мере один блок 240 тактильной обратной связи, расположенный под гибким сенсорным экраном 220.
[0081] Блок 240 тактильной обратной связи содержит якорную часть 242 и катушечную часть 244, при этом по меньшей мере одна из упомянутых частей выполнена подвижной, и начальный зазор между якорной частью 242 и катушечной частью 244 имеет заранее заданное значение.
[0082] Когда на катушечную часть 244 подается питание, зазор между якорной частью 242 и катушечной частью 244 изменяется под электромагнитным воздействием, и измененный зазор становится больше или меньше заранее заданного значения, так что образуется выступ или углубление в соответствующем месте гибкого сенсорного экрана 240.
[0083] Схема формирования выступа в соответствующем месте гибкого сенсорного экрана 240 может быть такой, как показанная на фиг. 2В, а схема формирования углубления в соответствующем месте гибкого сенсорного экрана 240 может быть такой, как показанная на фиг. 2С.
[0084] Таким образом, система тактильной обратной связи, предлагаемая вариантом осуществления изобретения, осуществляет физическую обратную связь гибкого сенсорного экрана посредством блока тактильной обратной связи, содержащего якорную часть и катушечную часть, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь эффекта быстрого физического деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования.
[0085] Второй вариант осуществления изобретения.
[0086] Как показано на фиг. 3А, которая поясняет структурную схему системы тактильной обратной связи, предлагаемой вторым вариантом осуществления настоящего изобретения, система тактильной обратной связи может быть реализована как часть электронного устройства, содержащего гибкий сенсорный экран. Электронное устройство может быть одним из следующего: смартфон, планшетный компьютер, устройство для чтения электронных книг, портативный компьютер или настольный дисплей. Система тактильной обратной связи содержит по меньшей мере один блок 340 тактильной обратной связи, расположенный под гибким сенсорным экраном 320.
[0087] Гибкий сенсорный экран 320 может быть прямоугольным гибким сенсорным экраном. Если гибкий сенсорный экран 320 может отображать различные изображения, то блок 340 тактильной обратной связи может быть расположен под всей областью гибкого сенсорного экрана 320. Например, если электронное устройство представляет собой компьютер, то гибкий сенсорный экран 320 может отображать различные интерфейсы, и местоположения таких изображений как кнопки, меню и гиперссылки на каждом интерфейсе не будут зафиксированы; в этом случае блок 340 тактильной обратной связи может быть расположен под всей областью гибкого сенсорного экрана 320. Однако если гибкий сенсорный экран 320 отображает только несколько неподвижных изображений, то блок 340 тактильной обратной связи может быть расположен только под частичной областью гибкого сенсорного экрана 320. Например, если электронное устройство представляет собой сенсорную машину для организации очереди в операционном зале банка, гибкий сенсорный экран 320 может отображать только несколько фиксированных наборов интерфейсов, и местоположения таких изображений как кнопки, меню и гиперссылки на нескольких наборах интерфейсов являются зафиксированными; в этом случае блок 340 тактильной обратной связи может быть расположен только под частичной областью гибкого сенсорного экрана 320, соответствующей таким изображениям как кнопки, меню и гиперссылки. В вариантах осуществления поясняется примерами только расположение блока 340 тактильной обратной связи под всей областью гибкого сенсорного экрана 320.
[0088] Число блоков 340 тактильной обратной связи может равняться двум или более. Блок 340 тактильной обратной связи мозаично расположен под всей областью или частичной областью гибкого сенсорного экрана 320, как показано на фиг. 3В. Так называемое "мозаичное расположение" относится к размещению различных изображений без наложений или пропусков, чтобы полностью покрыть внутреннюю область панели экрана без зазоров или перекрытий. При этом форма проекции каждого блока 340 тактильной обратной связи на панели гибкого сенсорного экрана 320 представляет собой многоугольник. Многоугольник может включать не только квадрат и/или правильный шестиугольник, но также может включать и прямоугольник, правильный треугольник и т.п. В варианте осуществления изобретения форма проекции каждого блока 340 тактильной обратной связи на панели гибкого сенсорного экрана 320, являющаяся правильным шестиугольником, приводится только для примера.
[0089] Каждый блок 340 тактильной обратной связи содержит якорную часть и катушечную часть, при этом по меньшей мере одна упомянутая часть является подвижной, и начальный зазор между якорной частью и катушечной частью имеет заранее заданное значение. Когда на катушечную часть подают питание, зазор между якорной частью и катушечной частью изменяется под электромагнитным воздействием, при этом измененный зазор становится больше или меньше заранее заданного значения, так что образуется выступ или углубление в соответствующем месте гибкого сенсорного экрана 320.
[0090] Согласно различным структурам и местоположениям якорной части и катушечной части, блок 340 тактильной обратной связи может иметь различные виды реализации. Например, каждый блок 340 тактильной обратной связи может быть одним из четырех блоков тактильной обратной связи, указанных ниже.
[0091] Блок 340а тактильной обратной связи первого типа содержит корпус 341, неподвижную катушечную часть 342 в нижней части корпуса 341 и подвижную якорную часть 343 в верхней части корпуса 341, при этом якорная часть 343 представляет собой электромагнит или постоянный магнит и связана с катушечной частью 342 посредством пружины 344. Структурная схема якорной части 343, представляющей собой электромагнит, может быть такой, как показанная на фиг. 3С или фиг. 3D; а структурная схема якорной части 343, представляющей собой постоянный магнит, может быть такой, как показанная на фиг. 3Е или фиг. 3F. Блок тактильной обратной связи, который показан на фиг. 2А-2С, является именно блоком тактильной обратной связи первого типа.
[0092] Блок 340b тактильной обратной связи второго типа содержит корпус 341, неподвижную полую катушечную часть 345 в нижней части корпуса 341 и подвижную цилиндрическую якорную часть 346 в полости полой катушечной части 345, при этом цилиндрическая якорная часть 346 представляет собой электромагнит или постоянный магнит, и нижняя часть цилиндрической якорной части 346 связана с корпусом 341 посредством пружины 347. Структурная схема цилиндрической якорной части 346, являющейся электромагнитом, может быть такой, как показанная на фиг. 3G; а структурная схема цилиндрической якорной части 346, являющейся постоянным магнитом, может быть такой, как показанная на фиг. 3Н. Блок тактильной обратной связи, который показан на фиг. 3А, является именно блоком тактильной обратной связи второго типа.
[0093] Блок тактильной обратной связи третьего типа содержит корпус, неподвижную якорную часть в нижней части корпуса и подвижную катушечную часть в верхней части корпуса, при этом якорная часть представляет собой постоянный магнит и связана с катушечной частью посредством пружины. Так как структуры блока тактильной обратной связи третьего типа и блока тактильной обратной связи первого типа по существу симметричны, то структурная схема блока тактильной обратной связи третьего типа может быть получена переменой местоположений якорной части 343 и катушечной части 342, показанных на фиг. 3Е или фиг. 3F.
[0094] Блок тактильной обратной связи четвертого типа содержит корпус, полую неподвижную якорную часть в нижней части корпуса и подвижную цилиндрическую катушечную часть в полости полой неподвижной якорной части, при этом полая якорная часть представляет собой постоянный магнит, и нижняя часть цилиндрической катушечной части связана с корпусом посредством пружины. Так как структуры блока тактильной обратной связи четвертого типа и блока тактильной обратной связи второго типа по существу симметричны, то структурная схема блока тактильной обратной связи четвертого типа может быть получена переменой местоположений полой катушечной части 345 и цилиндрической якорной части 346 на фиг. 3Н.
[0095] Следует отметить, что в предшествующих примерах только иллюстрируется, что одна из частей, якорная или катушечная, является подвижной, а другая часть является неподвижной. Но в конкретном варианте осуществления изобретения возможен тип реализации, в котором и якорная часть, и катушечная часть являются подвижными; например, якорная часть и катушечная часть связаны посредством пружины, и якорная часть или катушечная часть в нижней части корпуса также связана с корпусом посредством пружины.
[0096] Кроме того, из вышеприведенных структурных схем можно видеть, что начальный зазор между якорной частью и катушечной частью имеет такое заранее заданное значение, что гибкий сенсорный экран 320 остается плоским. Когда на катушечную часть подают питание положительным током, зазор между якорной частью и катушечной частью изменяется под электромагнитным воздействием до первого значения, при этом первое значение больше заранее заданного значения, чтобы образовался выступ в соответствующем месте гибкого сенсорного экрана 320. Когда на катушечную часть подают питание отрицательным током, зазор между якорной частью и катушечной частью изменяется под электромагнитным воздействием до второго значения, при этом второе значение меньше заранее заданного значения, чтобы образовалось углубление в соответствующем месте гибкого сенсорного экрана 320. Так как относительное перемещение между якорной частью и катушечной частью под электромагнитным воздействием является очень быстрым, то скорость образования деформации на гибком сенсорном экране 320 также является очень большой.
[0097] Таким образом, система тактильной обратной связи, предлагаемая вариантом осуществления изобретения, реализует тактильную обратную связь гибкого сенсорного экрана посредством блока тактильной обратной связи, содержащего якорную часть и катушечную часть, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования.
[0098] Третий вариант осуществления изобретения.
[0099] Как показано на фиг. 4А, которая поясняет структурную схему системы тактильной обратной связи, предлагаемую третьим вариантом осуществления настоящего изобретения, система тактильной обратной связи может быть реализована как часть электронного устройства, содержащего гибкий сенсорный экран. Электронное устройство может быть одним из следующего: смартфон, планшетный компьютер, устройство для чтения электронных книг, портативный компьютер или настольный дисплей. Система тактильной обратной связи содержит по меньшей мере один блок 440 тактильной обратной связи, расположенный под гибким сенсорным экраном 420.
[00100] Гибкий сенсорный экран 420 может быть прямоугольным гибким сенсорным экраном. Блок 440 тактильной обратной связи может быть расположен под всей областью или частичной областью гибкого сенсорного экрана 420. В варианте осуществления изобретения расположение блока 420 тактильной обратной связи под всей областью гибкого сенсорного экрана 440 приводится только в качестве примера.
[00101] В качестве варианта осуществления изобретения, более предпочтительного, чем предлагаемый второй вариант осуществления изобретения, в настоящем варианте осуществления изобретения число блоков 440 тактильной обратной связи равно двум или более. Блоки 440 тактильной обратной связи мозаично расположены на многоуровневых панелях, прилегающих друг к другу сверху донизу под всей (или частичной) областью гибкого сенсорного экрана 420. Форма проекции каждого блока 440 тактильной обратной связи на панели гибкого сенсорного экрана 420 представляет собой многоугольник, и форма проекции блока 440 тактильной обратной связи, расположенного на нижнем уровне на панели гибкого сенсорного экрана 420, больше или равна форме проекции блока 440 тактильной обратной связи, расположенного на верхнем уровне на панели гибкого сенсорного экрана 420. В варианте осуществления изобретения форма проекции каждого блока 440 тактильной обратной связи на панели гибкого сенсорного экрана 420, являющаяся квадратом, приводится только в качестве примера, как показано на фиг. 4В.
[00102] Например, три уровня блоков 440 тактильной обратной связи расположены под гибким сенсорным экраном 420, причем длина стороны квадрата блока 440 тактильной обратной связи на низшем уровне равна 9а; длина стороны квадрата блока 440 тактильной обратной связи на среднем уровне равна 3а; и длина стороны квадрата блока 440 тактильной обратной связи на самом верхнем уровне равна а. То есть, на среднем уровне имеются девять блоков 440 тактильной обратной связи, расположенных выше одного блока 440 тактильной обратной связи на низшем уровне. И на самом верхнем уровне имеются девять блоков 440 тактильной обратной связи, расположенных выше одного блока 440 тактильной обратной связи на среднем уровне.
[00103] В этом случае посредством подачи питания на блоки 440 тактильной обратной связи на различных уровнях величина деформации гибкого сенсорного экрана 420 в вертикальном направлении является большей, например, при условии, что величина деформации блока тактильной обратной связи во втором варианте осуществления изобретения в вертикальном направлении равна h, а величина деформации блока тактильной обратной связи на каждом уровне в третьем варианте осуществления изобретения в вертикальном направлении также равна h, тогда величина деформации гибкого сенсорного экрана 420 в третьем варианте осуществления изобретения в вертикальном направлении будет равна 3h, а время реагирования остается равным времени реагирования, необходимому блоку тактильной обратной связи, предлагаемому вторым вариантом осуществления. Минимальная величина деформации гибкого сенсорного экрана 420 на его панели определяется формой проекции блока 440 тактильной обратной связи на самом верхнем уровне на панели гибкого сенсорного экрана 420.
[00104] Таким образом, система тактильной обратной связи, предлагаемая вариантом осуществления изобретения, реализует тактильную обратную связь гибкого сенсорного экрана посредством блока тактильной обратной связи, содержащего якорную часть и катушечную часть, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования. В то же время, посредством расположения многоуровневых блоков тактильной обратной связи под гибким сенсорным экраном величина деформации гибкого сенсорного экрана в вертикальном направлении становится большей без изменения времени реагирования, так чтобы настоящее изобретение было более подходящим образом реализовано в электронном устройстве, содержащем большой гибкий сенсорный экран, например, широкоформатный экран для вещания прогноза погоды, и компьютер в графической рабочей станции. Кроме того, так как блок тактильной обратной связи обеспечивает тактильную обратную связь и распознает введенные сигналы на основании давления, создаваемого электромагнитным эффектом, отсутствует какая-либо точка контакта или соединение, выполняемое во внутренней области блока тактильной обратной связи, благодаря чему уменьшаются потери, вызванные трением, и увеличиваются точность ввода и срок службы экрана.
[00105] Четвертый вариант осуществления изобретения.
[00106] Как показано на фиг. 5, которая поясняет алгоритм способа управления системой тактильной обратной связи, предлагаемого четвертым вариантом осуществления настоящего изобретения, способ управления системой тактильной обратной связи может быть применен для электронного устройства, содержащего гибкий сенсорный экран и систему тактильной обратной связи, предлагаемую первым или вторым вариантом осуществления. Способ управления системой тактильной обратной связи включает следующие шаги.
[00107] На шаге 502 обнаруживают, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок.
[00108] Электронное устройство обнаруживает, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок.
[00109] На шаге 504, если результатом обнаружения является то, что отображаемое изображение представляет собой заранее заданное изображение, на блок тактильной обратной связи под местоположением отображаемого изображения подают питание, так чтобы под электромагнитным воздействием изменить зазор между якорной частью и катушечной частью в блоке тактильной обратной связи.
[00110] Если результатом обнаружения электронным устройством является то, что отображаемое изображение представляет собой заранее заданное изображение, тогда электронное устройство подает питание на блок тактильной обратной связи под местоположением отображаемого изображения, так чтобы под электромагнитным воздействием изменился зазор между якорной частью и катушечной частью в блоке тактильной обратной связи; таким образом, образуется выступ или углубление в местоположении отображаемого изображения на гибком сенсорном экране.
[00111] Таким образом, способ управления системой тактильной обратной связи, предлагаемый вариантом осуществления, реализует тактильную обратную связь гибкого сенсорного экрана посредством подачи питания на блок тактильной обратной связи под отображаемым изображением на гибком сенсорном экране, когда отображаемое изображение представляет собой заранее заданное изображение, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования.
[00112] Пятый вариант осуществления изобретения.
[00113] Как показано на фиг. 6, которая поясняет алгоритм способа управления системой тактильной обратной связи, предлагаемого пятым вариантом осуществления настоящего изобретения, способ управления системой тактильной обратной связи может применяться в электронном устройстве, содержащем гибкий сенсорный экран и систему тактильной обратной связи, предлагаемую первым или вторым вариантом осуществления. Способ управления системой тактильной обратной связи включает следующие шаги.
[00114] На шаге 602 обнаруживают, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок.
[00115] Предположим, что начальное состояние гибкого сенсорного экрана представляет собой плоское состояние, электронное устройство обнаруживает, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок.
[00116] На шаге 604, если результатом обнаружения является то, что отображаемое изображение представляет собой заранее заданное изображение, то запрашивают параметр тока, соответствующий отображаемому изображению, из заранее сохраненной соответствующей зависимости между заранее заданным изображением и параметром тока согласно отображаемому изображению; при этом параметр тока включает направление тока и значение тока.
[00117] Электронное устройство может заранее сохранять соответствующую зависимость между заранее заданным изображением и параметром тока, например, соответствующую зависимость между заранее заданным изображением (кнопкой) и параметром тока (положительный, величина тока х мА), и соответствующую зависимость между заранее заданным изображением (кадром) и параметром тока (положительный, величина тока уа мА, уровень серого а кадра). Когда результатом обнаружения электронным устройством является то, что отображаемое изображение представляет собой заранее заданное изображение, электронное устройство может запросить параметр тока, соответствующий отображаемому изображению, из заранее сохраненной соответствующей зависимости между заранее заданным изображением и параметром тока согласно отображаемому изображению; при этом параметр тока включает направление тока и значение тока.
[00118] На шаге 606 на блок тактильной обратной связи под местоположением отображаемого изображения подается питание согласно запрошенному параметру тока, соответствующему отображаемому изображению, так чтобы под электромагнитным воздействием изменился зазор между якорной частью и катушечной частью в блоке тактильной обратной связи.
[00119] Электронное устройство подает питание на блок тактильной обратной связи под местоположением отображаемого изображения согласно запрошенному параметру тока, соответствующему отображаемому изображению, так чтобы под электромагнитным воздействием изменился зазор между якорной частью и катушечной частью в блоке тактильной обратной связи; таким образом, образуется выступ или углубление в местоположении отображаемого изображения на гибком сенсорном экране. В это время изменение относительного расстояния H зависит от значения тока в блоке тактильной обратной связи.
[00120] На шаге 608 обнаруживают, изменился ли ток.
[00121] Есть большая разница между режимом работы гибкого сенсорного экрана, содержащего систему тактильной обратной связи, и режимом работы обыкновенного сенсорного экрана, например, когда пользователь касается конкретной кнопки обыкновенного сенсорного экрана, будет запущена операция, которую электронное устройство считает необходимым выполнить, когда кнопка нажата. Однако когда пользователь касается конкретной кнопки гибкого сенсорного экрана, содержащего систему тактильной обратной связи, будет запущена только операция, в результате которой электронное устройство заставляет курсор оставаться на кнопке, а кнопку перейти в выделенное состояние для обратной связи; и только когда пользователь выполняет фактическое физическое нажатие кнопки, будет запущена операция, которую электронное устройство считает необходимым выполнить, когда кнопка нажата. В это время электронное устройство не только должно собирать данные о местоположении пальцев пользователя на сенсорном экране посредством гибкого сенсорного экрана, но также должно собирать данные об операции нажатия пальцами пользователя на сенсорном экране с помощью блока тактильной обратной связи. Когда пользователь выполняет операцию нажатия на блоке тактильной обратной связи посредством пальцев, ток в блоке тактильной обратной связи будет изменяться вследствие обратной реакции электрического тока. Электронное устройство может определять, изменился ли ток, втекающий в блок тактильной обратной связи, чтобы судить, нажимает ли пользователь на блок тактильной обратной связи посредством пальцев, и получать на основании величины изменения тока информацию, например, о смещении, силе и скорости нажатия пальцами пользователя.
[00122] На шаге 610, если результатом обнаружения является то, что ток изменился, тогда изменяют отображаемое изображение на гибком сенсорном экране согласно величине изменения тока, и/или регулируют ток согласно величине изменения тока.
[00123] Если результатом обнаружения электронным устройством является то, что ток, подаваемый на блок тактильной обратной связи, изменился, то тогда запускают различные операции согласно различным сценариям.
[00124] Если отображаемое содержимое гибкого экрана дисплея должно быть изменено после нажатия кнопки на отображаемом изображении, а результатом обнаружения электронным устройством является то, что ток, подаваемый на блок тактильной обратной связи, изменился, тогда отображаемое изображение на гибком сенсорном экране изменяют согласно величине изменения тока.
[00125] Если необходимо обеспечить пользователя ощущением тактильной обратной связи, приближенным к реальной физической кнопке, после того, как кнопка на отображаемом изображении нажата, а результатом обнаружения электронным устройством является то, что ток, подаваемый на блок тактильной обратной связи, изменился, тогда ток повторно регулируют согласно величине изменения тока. В одном варианте осуществления изобретения регулировка тока согласно величине изменения тока включает следующие два подэтапа.
[00126] На первом подэтапе параметр тока, соответствующий величине изменения тока, запрашивают из заранее сохраненной соответствующей зависимости между величиной изменения тока и параметром тока согласно величине изменения тока; при этом параметр тока включает направление тока и значение тока.
[00127] Электронное устройство может заранее сохранять соответствующую зависимость между величиной изменения тока и параметром тока, нуждающимся в регулировке, например, схема соотношения перемещения клавиши и силы тактильной обратной связи для фактической физической клавиши может быть такой, как показано на фиг. 7. Чтобы имитировать физическую клавишу, соответствующая зависимость между величиной изменения тока и параметром тока, нуждающимся в регулировке, может быть рассчитана согласно зависимости, которая показана на фиг. 7. В частности, при нажатии пальцами пользователя величина изменения тока пропорциональна смещению. После того, как пропорциональная соответствующая зависимость устанавливается для значения изменения тока, и клавиша перемещается как физическая клавиша, соответствующее усилие тактильной обратной связи можно запросить согласно соотношению, как показано на фиг. 7, и тогда параметр тока, нуждающийся в регулировке, может быть рассчитан согласно запрошенной силе тактильной обратной связи, таким образом, устанавливается соответствующая зависимость между величиной изменения тока и параметром тока, нуждающимся в регулировке. Электронное устройство может заранее сохранять соответствующую зависимость между величиной изменения тока и параметром тока, нуждающимся в регулировке, и после того, как конкретное значение изменения тока определено, запрашивать параметр тока, соответствующий величине изменения тока, из заранее сохраненной соответствующей зависимости между величиной изменения тока и параметром тока согласно обнаруженной величине изменения тока; при этом параметр тока включает направление тока и значение тока.
[00128] На втором подэтапе ток регулируют согласно запрошенному параметру тока, соответствующему величине изменения тока.
[00129] Впоследствии, электронное устройство регулирует ток согласно запрошенному параметру тока, соответствующему величине изменения тока, так чтобы пользователь получал более реальное ощущение тактильной обратной связи при нажатии на выступающую кнопку, формируемую блоком тактильной обратной связи на гибком сенсорном экране.
[00130] Таким образом, способ управления системой тактильной обратной связи, предлагаемый вариантом осуществления изобретения, реализует тактильную обратную связь гибкого сенсорного экрана посредством подачи питания на блок тактильной обратной связи под отображаемым изображением на гибком сенсорном экране, когда отображаемое изображение представляет собой заранее заданное изображение, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования. Кроме того, посредством дополнительного регулирования отображаемого изображения на гибком экране дисплея или повторного регулирования тока в блоке тактильной обратной связи посредством изменения величины тока в блоке тактильной обратной связи, способ дает возможность пользователю получать более реальное ощущение тактильной обратной связи во время выполнения операции и делает выполнение операции более реальным и эффективным, а также эффективно предотвращает неверное выполнение операций.
[00131] Шестой вариант осуществления изобретения.
[00132] Как показано на фиг. 8, которая поясняет блок-схему устройства для управления системой тактильной обратной связи, предлагаемого шестым вариантом осуществления настоящего изобретения. Устройство для управления системой тактильной обратной связи может применяться в электронном устройстве, содержащем гибкий сенсорный экран и систему тактильной обратной связи, предлагаемую первым или вторым вариантом осуществления. Устройство для управления системой тактильной обратной связи содержит: модуль 820 обнаружения изображения и модуль 840 управления блоком.
[00133] Модуль 820 обнаружения изображения сконфигурирован для обнаружения, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением; причем заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок.
[00134] Модуль 840 управления блоком сконфигурирован для подачи питания на блок тактильной обратной связи под местоположением отображаемого изображения, так чтобы под электромагнитным воздействием изменился зазор между якорной частью и катушечной частью в блоке тактильной обратной связи, если результатом обнаружения модулем 820 обнаружения изображения является то, что отображаемое изображение представляет собой заранее заданное изображение.
[00135] Таким образом, устройство для управления системой тактильной обратной связи, предлагаемое вариантом осуществления изобретения, реализует тактильную обратную связь гибкого сенсорного экрана посредством подачи питания на блок тактильной обратной связи под отображаемым изображением на гибком сенсорном экране, когда отображаемое изображение представляет собой заранее заданное изображение, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования.
[00136] Шестой вариант осуществления изобретения.
[00137] Как показано на фиг. 9, которая поясняет блок-схему устройства для управления системой тактильной обратной связи, предлагаемого седьмым вариантом осуществления настоящего изобретения, устройство для системы тактильной обратной связи может применяться в электронном устройстве, содержащем гибкий сенсорный экран и систему тактильной обратной связи, предлагаемую первым или вторым вариантом осуществления. Устройство для управления системой тактильной обратной связи содержит: модуль 820 обнаружения изображения, модуль 830 запроса изображения, модуль 840 управления блоком, модуль 860 обнаружения тока, модуль 870 регулировки отображения и модуль 890 регулировки тока.
[00138] Модуль 820 обнаружения изображения сконфигурирован для обнаружения, является ли отображаемое изображение на гибком сенсорном экране заранее заданным изображением, при этом заранее заданное изображение включает одно или комбинацию из следующего: кнопка, кадр, тэг, меню, гиперссылка и значок.
[00139] Модуль 830 запроса изображения сконфигурирован для запроса параметра тока, соответствующего отображаемому изображению, из заранее сохраненной соответствующей зависимости между заранее заданным изображением и параметром тока согласно отображаемому изображению, обнаруженному модулем 820 обнаружения изображения; причем параметр тока включает направление тока и значение тока.
[00140] Модуль 840 управления блоком сконфигурирован для подачи питания на блок тактильной обратной связи под местоположением отображаемого изображения согласно параметру тока, соответствующему отображаемому изображению, запрашиваемому модуль 840 запроса изображения.
[00141] Модуль 860 обнаружения тока сконфигурирован для обнаружения, изменился ли ток, подаваемый модулем 840 управления блоком.
[00142] Модуль 870 регулировки отображения сконфигурирован для изменения отображаемого изображения на гибком сенсорном экране согласно величине изменения тока, если результатом обнаружения модулем 860 обнаружения тока является то, что ток изменился.
[00143] Модуль 890 регулировки тока сконфигурирован для регулировки тока согласно величине изменения тока, если результатом обнаружения модулем 860 обнаружения тока является то, что ток изменился.
[00144] В одном варианте осуществления изобретения устройство также содержит модуль 880 запроса изменения.
[00145] Модуль 880 запроса изменения сконфигурирован для запроса параметра тока, соответствующего величине изменения тока, из заранее сохраненной соответствующей зависимости между величиной изменения тока и параметром тока согласно величине изменения тока, обнаруженной модулем 860 обнаружения тока, при этом параметр тока включает направление тока и значение тока.
[00146] Модуль 890 регулировки тока сконфигурирован для регулировки тока согласно параметру тока, соответствующему величине изменения тока, которую запрашивает модуль 880 запроса изменения.
[00147] Следует пояснить, что в некоторых вариантах осуществления изобретения устройство может не содержать модуль 880 запроса изменения и модуль 890 регулировки тока. В некоторых других вариантах осуществления изобретения устройство может не содержать модуль 870 регулировки отображения.
[00148] Таким образом, устройство для управления системой тактильной обратной связи, предлагаемое вариантом осуществления, реализует тактильную обратную связь гибкого сенсорного экрана посредством подачи питания на блок тактильной обратной связи под отображаемым изображением на гибком сенсорном экране, когда отображаемое изображение представляет собой заранее заданное изображение, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования. Кроме того, посредством дополнительной регулировки отображаемого изображения гибкого экрана дисплея или повторной регулировки тока в блоке тактильной обратной связи посредством изменения величины тока в блоке тактильной обратной связи, способ дает возможность пользователю получать более реальное ощущение тактильной обратной связи во время выполнения операции и делает выполнение операции более реальным и эффективным, а также эффективно предотвращает неверное выполнение операций.
[00149] Седьмой вариант осуществления изобретения.
[00150] Как показано на фиг. 10, которая поясняет блок-схему блока дисплея, предлагаемого седьмым вариантом осуществления настоящего изобретения, блок дисплея содержит гибкий экран 1020 дисплея и систему 1040 тактильной обратной связи.
[00151] Система 1040 тактильной обратной связи может быть любой из систем тактильной обратной связи, предлагаемых от первого до третьего варианта осуществления изобретения.
[00152] Таким образом, блок дисплея, предлагаемый вариантом осуществления, снабжается блоком тактильной обратной связи, содержащим якорную часть и катушечную часть под гибким сенсорным экраном, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования.
[00153] Восьмой вариант осуществления изобретения.
[00154] Как показано на фиг. 11, которая поясняет блок-схему электронного устройства, предлагаемого восьмым вариантом осуществления настоящего изобретения, электронное устройство содержит гибкий экран 1120 дисплея, систему 1140 тактильной обратной связи и устройство 1160 управления для управления системой тактильной обратной связи.
[00155] Система 1140 тактильной обратной связи может быть любой из систем тактильной обратной связи, предлагаемых от первого до третьего варианта осуществления изобретения.
[00156] Устройство 1160 управления для управления системой тактильной обратной связи может быть устройством, предлагаемым пятым или шестым вариантом осуществления.
[00157] Таким образом, электронное устройство, предлагаемое вариантом осуществления, снабжается системой тактильной обратной связи, содержащей якорную часть и катушечную часть под гибким сенсорным экраном, и решает проблему длительного времени реагирования при реализации системы тактильной обратной связи, использующей заряженную жидкую среду, а также позволяет достичь быстрого деформирования гибкого сенсорного экрана путем простой подачи питания на катушечную часть и значительно сократить время реагирования.
[00158] Следует пояснить, что, когда устройства управления для управления системой тактильной обратной связи, предлагаемые в вышеупомянутых вариантах осуществления изобретения, управляют системой тактильной обратной связи, изобретение было иллюстрировано на примере разделения функциональных модулей. Во время практического применения предшествующее распределение функций может выполняться различными функциональными модулями согласно требованиям. То есть внутренняя часть устройства разделяется на различные функциональные модули для выполнения всех или части функций, описанных выше. Кроме того, устройство управления для управления системой тактильной обратной связи, предлагаемое предшествующими вариантами осуществления изобретения, и варианты осуществления способа управления системой тактильной обратной связи, принадлежат одной и той же концепции, и подробный процесс их реализации показан в вариантах осуществления способа и поэтому подробно не рассматривается здесь.
[00159] Номера предшествующих вариантов осуществления настоящего изобретения предназначены только для описания и не представляют лучшие или худшие из вариантов осуществления.
[00160] Специалистам в данной области техники должно быть понятно, что все или часть шагов реализации предшествующих вариантов осуществления изобретения могут выполняться аппаратными средствами или могут выполняться соответствующими аппаратными средствами, управляемыми программой. Программа может храниться на машиночитаемом носителе данных, и упомянутым выше носителем данных могут быть постоянное запоминающее устройство (Read-Only Memory, ROM), магнитная лента или оптический диск и т.п.
[00161] Вышеизложенное представляет собой просто предпочтительные варианты осуществления изобретения, но не предназначено для ограничения изобретения, и любые изменения, эквивалентные замены, улучшения и т.п., сделанные в пределах сущности и принципов изобретения, должны находиться в пределах охраны изобретения.
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта

