Результат интеллектуальной деятельности: УСТРОЙСТВО МЕХАНИЧЕСКОГО ПЕРЕМЕЩЕНИЯ ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА
Вид РИД
Изобретение
Изобретение относится к точной механике и может быть использовано для сближения зонда и образца в сканирующей зондовой микроскопии.
Известно устройство механического перемещения для сканирующего зондового микроскопа, содержащее основание, СЗМ головку, оснащенную первой опорой, второй опорой, третьей опорой, при этом первая опора сопряжена с основанием и снабжена первым приводом, установленным на головке, а вторая опора и третья опора также сопряжены с основанием (Патент RU 2161343).
В этом устройстве в качестве подвижной опоры используется первая опора. В результате этого СЗМ головка в процессе подвода вместе с зондом изменяет угол по отношению к плоскости поверхности образца. Это приводит к снижению точности измерений. Данное устройство выбрано в качестве прототипа предложенного решения.
Технический результат предложенного решения заключается в повышении точности измерений.
Указанный технический результат достигается тем, что в устройстве механического перемещения для сканирующего зондового микроскопа, содержащем основание, СЗМ головку, оснащенную первой опорой, второй опорой, третьей опорой, при этом первая опора сопряжена с основанием и снабжена первым приводом, установленным на головке, а вторая опора и третья опора также сопряжены с основанием, вторая опора снабжена вторым приводом, установленным на головке, и третья опора снабжена третьим приводом, установленным на головке.
Существует вариант, в котором первый привод, второй привод и третий привод содержат передаточный механизм, обеспечивающий поступательное перемещение первой опоры, второй опоры и третьей опоры.
Существует вариант, в котором первый привод, второй привод и третий привод содержат модуль измерения перемещения.
Существует вариант, в котором первый привод, второй привод и третий привод содержат датчики крайних положений.
Существует вариант, в котором корпус первого привода, второго привода и третьего привода выполнены из титана.
Существует вариант, в котором в него введен теплоотводящий модуль, сопряженный с мотором.
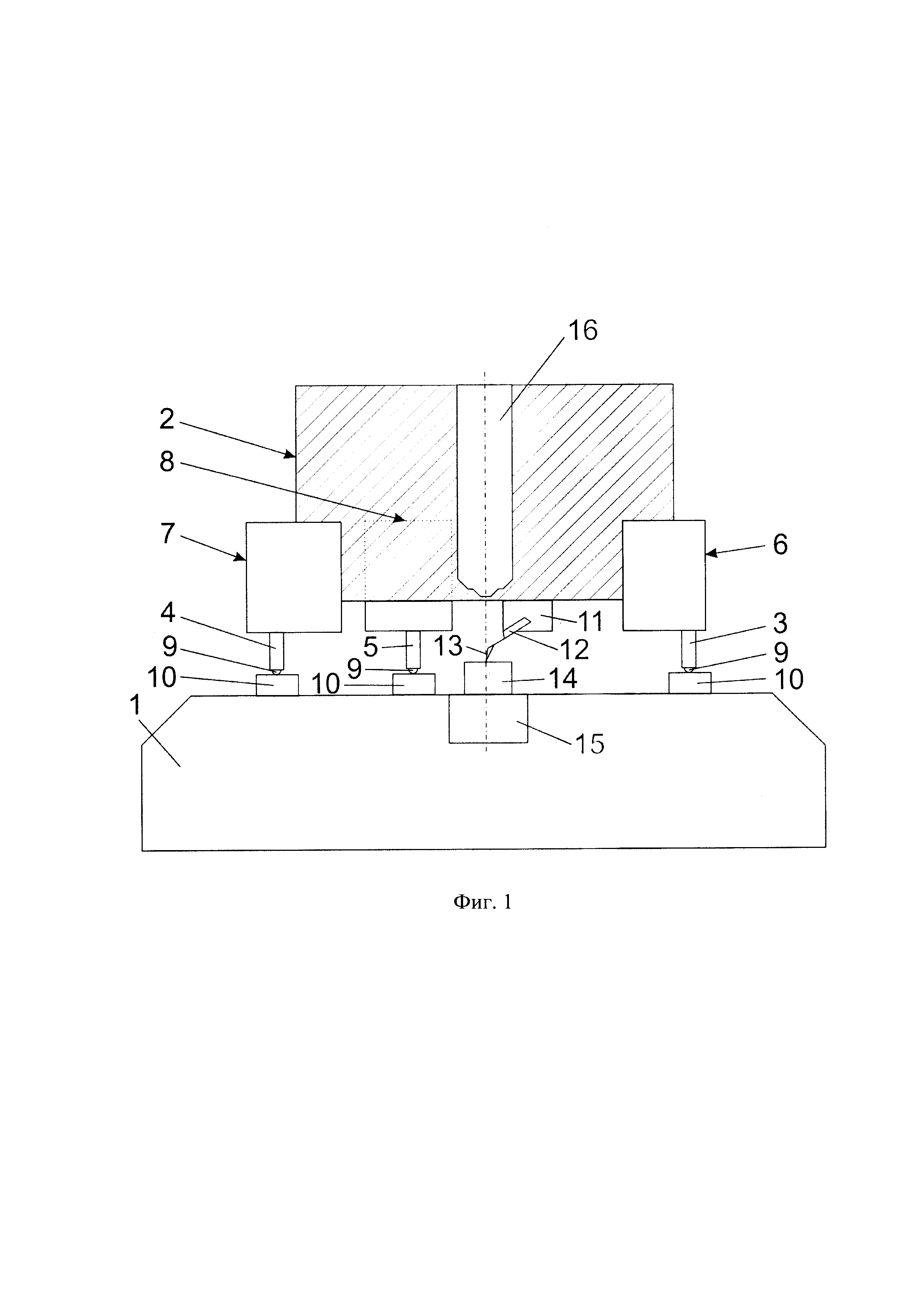
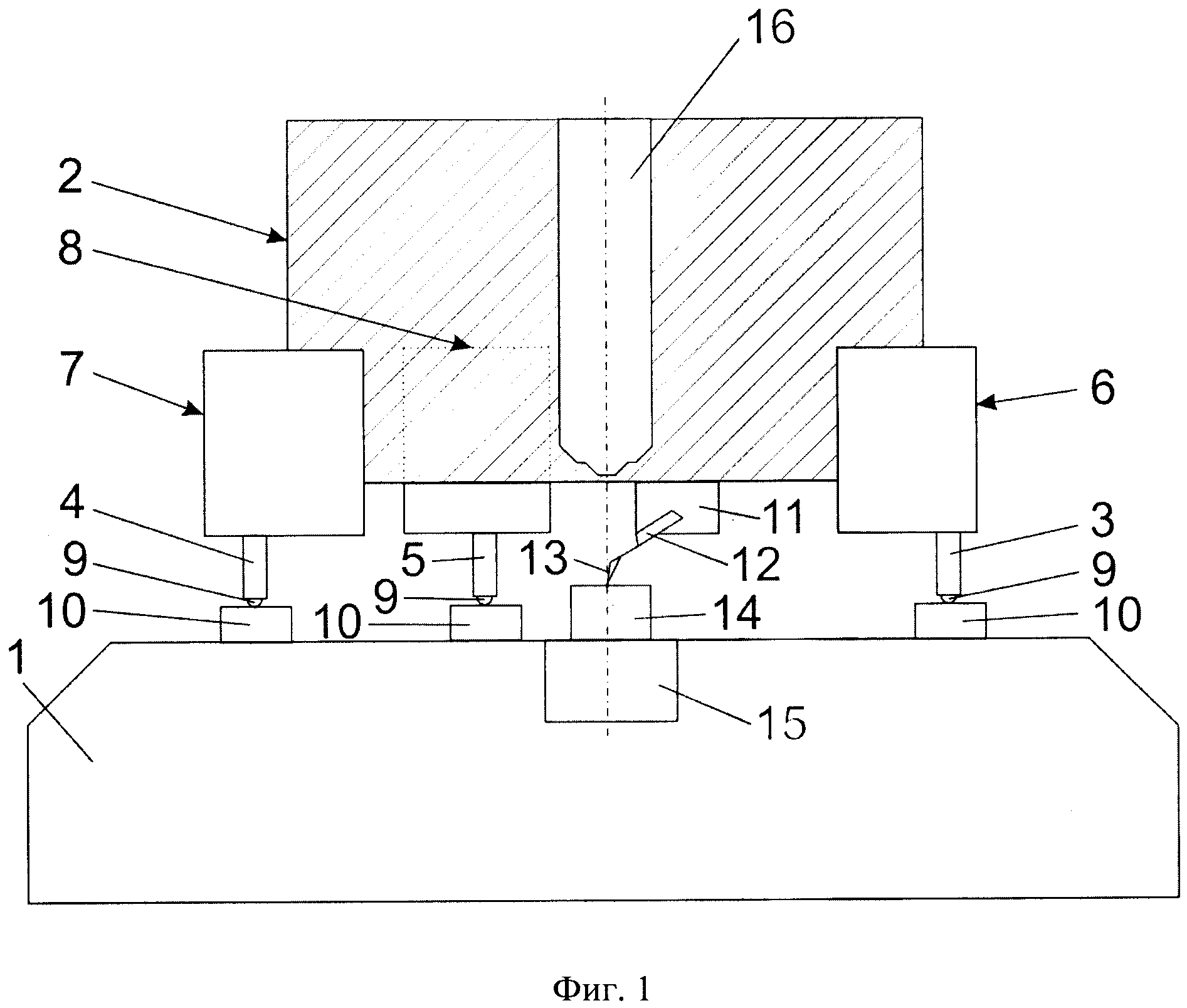
На фиг. 1 изображено устройство механического перемещения для сканирующего зондового микроскопа, вид сбоку.
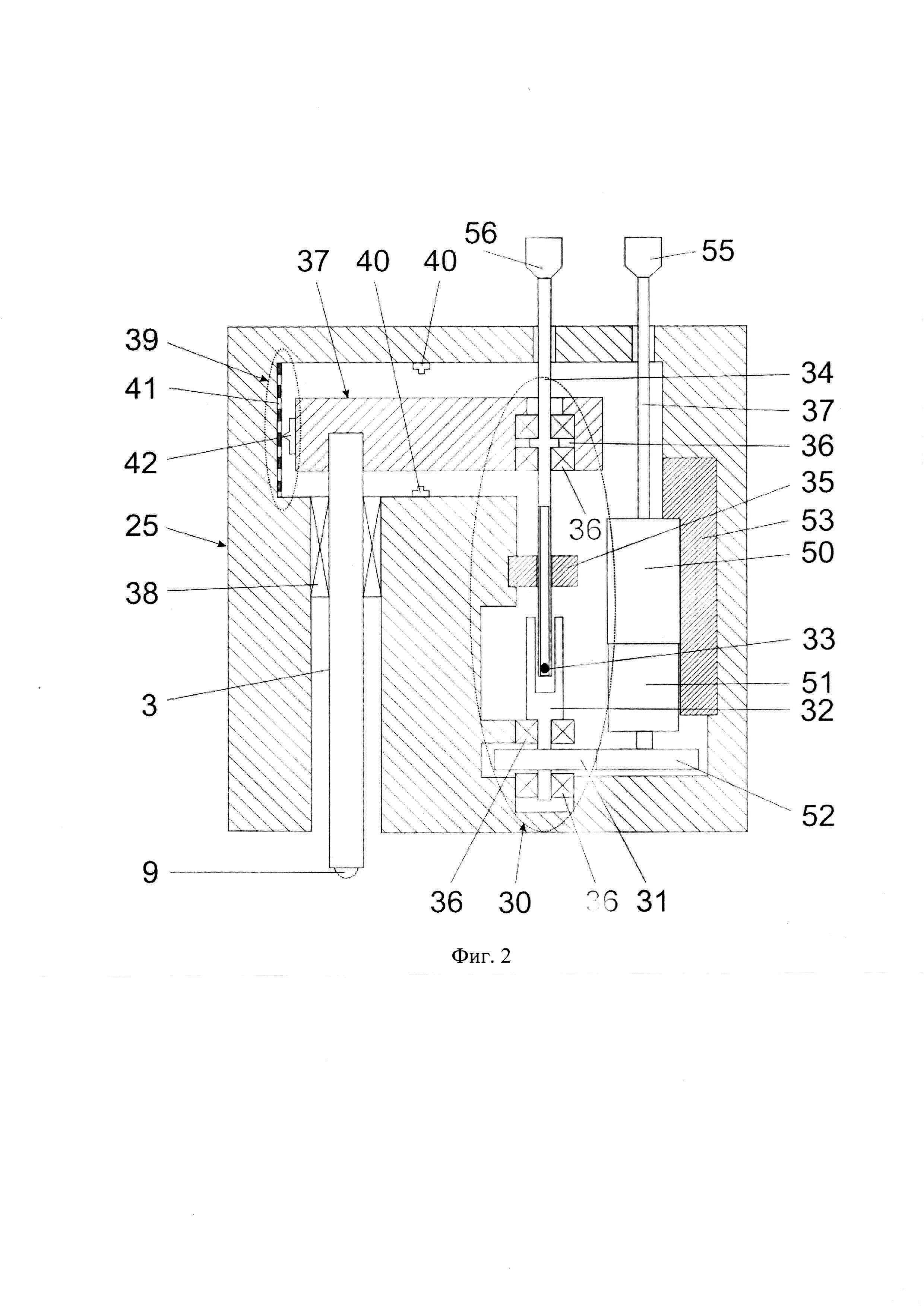
На фиг. 2 изображен привод устройства механического перемещения для сканирующего зондового микроскопа.
Устройство механического перемещения для сканирующего зондового микроскопа содержит основание 1 (фиг. 1), СЗМ головку 2, оснащенную первой опорой 3, второй опорой 4, третьей опорой 5. При этом первая опора 3 сопряжена с основанием 1 и снабжена первым приводом 6, установленным на СЗМ головке 2, вторая опора 4 снабжена вторым приводом 7, установленным на СЗМ головке 2, и третья опора 5 снабжена третьим приводом 8, установленным на СЗМ головке 2. Опоры 3, 4 и 5 содержат первые вкладыши 9, сопряженные со вторыми вкладышами 10, установленными на основании 1. Первые вкладыши 9 могут быть выполнены из стали ШХ15, вторые вкладыши 10 - из поликора. На СЗМ головке 2 закреплен модуль зонда 11 с зондом 12, включающим острие 13. На основании 1 установлен образец 14, сопряженный с зондом 12. В одном из вариантов образец 14 установлен на пьезосканере 15, закрепленном на основании 1. В СЗМ головке 2 может быть расположен объектив 16.
В корпусе 25 (фиг. 2) первого привода 6, второго привода 7 и третьего привода 8 расположен передаточный механизм 30, обеспечивающий поступательное перемещение первой опоры 3, второй опоры 4 и третьей опоры 5. Передаточный механизм 30 включает первую шестеренку 31, соединенную с направляющей 32, в пазу которой расположен штифт 33 винта 34, сопряженного с гайкой 35, закрепленной в корпусе 25. Передаточный механизм 30 установлен посредством подшипников 36 и сопряжен с платформой 37, в которой закреплена, например, первая опора 3, сопряженная с фрикционным элементом 38, закрепленным в корпусе 25.
Первый привод 6, второй привод 7 и третий привод 8 содержат модуль измерения перемещения 39.
Первый привод 6, второй привод 7 и третий привод 8 содержат датчики крайних положений 40.
В одном из вариантов модуль измерения перемещения 39 может включать датчик положения 41, закрепленный на корпусе 25, и считывающую головку 42, установленную на платформе 37.
Корпус 25 первого привода 6, второго привода 7 и третьего привода 8 выполнены из титана.
В корпусе 25 установлен мотор 50 с редуктором 51 и второй шестеренкой 52.
В корпусе 25 установлен теплоотводящий модуль 53, сопряженный с мотором 50.
Мотор 50 может быть снабжен первой рукояткой 55, а винт 34 - второй рукояткой 56.
Устройство механического перемещения для сканирующего зондового микроскопа работает следующим образом. Попеременно включая первый привод 6, второй привод 7 и третий привод 8, осуществляют подвод зонда 12 под нужным углом острия 13 к объекту 14. Первый привод 6, второй привод 7 и третий привод 8 работают следующим образом. Включают мотор 50 и посредством редуктора 51, второй шестеренки 52 и первой шестеренки 31 осуществляют вращение направляющей 32, которая вращает винт 34 посредством штифта 33. При вращении винта 34 в результате его взаимодействия с гайкой 35 происходит его осевое перемещение. При этом осуществляется линейное перемещение платформы 37 с первой опорой 3. При необходимости такое же перемещение можно осуществлять с использованием рукояток 55 и 56.
То, что в устройстве механического перемещения для сканирующего зондового микроскопа вторая опора 4 снабжена вторым приводом 7, установленным на СЗМ головке 2, и третья опора 5 снабжена третьим приводом 8, установленным на СЗМ головке 2, позволяет осуществлять плоскопараллельный подвод зонда 12 к образцу 14. Это позволяет обеспечить оптимальный угол зонда 12 (например, чтобы острие 13 располагалось по нормали к поверхности образца 14) относительно измеряемой поверхности образца 14, что повышает точность измерений.
То, что первый привод 6, второй привод 7 и третий привод 8 содержат передаточный механизм 30, обеспечивающий поступательное перемещение первой опоры 3, второй опоры 4 и третьей опоры 5 уменьшает трение этих опор о вторые вкладыши 10 основания 1. Это уменьшает их выработку, увеличивает стабильность положения СЗМ головки 2 в процессе сканирования образца 14 и повышает точность измерений.
То, что первый привод 6, второй привод 7 и третий привод 8 содержат модуль измерения перемещения 39 позволяет уменьшить вероятность несанкционированного касания зондом 12 образца 14, обеспечивает его сохранность и повышает точность измерений.
То, что первый привод 6, второй привод 7 и третий привод 8 содержат датчики крайних положений 40 повышает надежность работы устройства.
То, что корпус 25 первого привода 6, второго привода 7 и третьего привода 8 выполнены из титана, уменьшает термические дрейфы устройства и повышает точность измерений.
То, что в устройство введен теплоотводящий модуль 53, сопряженный с мотором 50, уменьшает термические дрейфы устройства и повышает точность измерений.
Способ измерения угла места радиолокационных целей, находящихся на больших углах места
Способ детектирования ближнепольного оптического отклика для сканирующего зондового микроскопа
Сканирующий зондовый микроскоп с устройством для функционирования многозондового датчика
Способ формирования изображения в сканирующей зондовой микроскопии
Способ пеленгации источника активных помех
Способ измерения угла места радиолокационных целей плоской фазированной антенной решеткой с одномерным движением луча
Способ формирования круговой зоны электронного сканирования цилиндрической фазированной антенной решетки с увеличенным темпом обзора
Способ измерения угла места радиолокационных целей цилиндрической фазированной антенной решеткой
Антенная система вторичного радиолокатора
Зонд ближнепольного оптического микроскопа
Способ изготовления пружин с повышенной прочностью
Система питания автоматической пушки
Способ измерения угла места радиолокационных целей плоской фазированной антенной решеткой с одномерным движением луча
Способ формирования круговой зоны электронного сканирования цилиндрической фазированной антенной решетки с увеличенным темпом обзора
Способ измерения угла места радиолокационных целей цилиндрической фазированной антенной решеткой
Система подачи боеприпасов для огнестрельного оружия
Рыбозащитное сооружение
Способ непрерывной утилизации жидкой фракции навоза крупного рогатого скота
Система для непрерывной утилизации жидкой фракции навоза крупного рогатого скота

