Результат интеллектуальной деятельности: СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ
Вид РИД
Изобретение
Настоящее техническое решение относится к области передачи информации от источников к приемникам по каналам связи. Предметная область - автоматизированные системы управления, в том числе центры и комплексы управления робототехническими объектами.
Известное техническое решение - многоканальная цифровая система связи [1] SU 1406805 A1 и его усовершенствованные версии [2] SU 1453607 A1 и [3] SU 1800631 А1 осуществляют передачу информации в двоичном коде по тракту передачи данных, образованному в многоканальной цифровой системе связи. Скорость передачи данных в этом тракте изменяется в зависимости от числа подключаемых в тракт каналов, свободных от передачи речи. Таким образом, технические решения [1-3] обеспечивают повышение скорости передачи данных, что позволяет сократить время передачи информации и повысить оперативность управления.
Известно техническое решение - способ передачи информации из передающего пункта в приемный и устройство его осуществления [4] RU 2416873 C2, которое характеризуется передачей информации без ее трансляции по каналу связи. В данном способе на передающем пункте вырабатывают и передают по каналу связи два сигнала «начало генерации» и «конец генерации» данных об информации. В приемном пункте по этим сигналам воспроизводят информацию в соответствии с заранее согласованной между пунктами закономерностью генерации двоичного кода.
Наиболее близким аналогом предлагаемого технического решения является способ передачи информации [5] RU 2560820 C2. Данное решение характеризуется тем, что организуются сеансы связи, длительность периодов которых определяется числом тактовых импульсов, периоды поступления которых равны периодам передачи сигналов в канале связи. При поступлении от источника информации и при поступлении очередного сигнала начала сеанса формируют контрольную информацию в двоичном коде, начиная с единицы и увеличивая ее на единицу с поступлением каждого следующего тактового импульса. При этом производят сравнение двоичного кода контрольной информации с двоичным кодом информации, поступившей от источника. Прекращают формирование контрольной информации при их совпадении и передают заранее сформированный единый сигнал генерации в канал связи. На приемной стороне по данному сигналу производится восстановление в двоичном коде копии информации, принятой от источника, и передают ее в приемник. Решение [5] обеспечивает сокращение числа сигналов генерации до одного. Однако это достигается за счет образования задержки в передаче сигнала генерации в канал связи. Длительность задержки зависит от объема информации и скорости передачи в канале связи - чем больший объем и ниже скорость, тем длительнее задержка. Например, если в составе информации передается команда управления и сценарий работы по ней, задержка может превысить ограничение на время передачи информации. Это критично для объектов, управляемых в реальном масштабе времени.
Технической задачей, на решение которой направлено настоящее техническое решение, является предложение способа передачи информации, обеспечивающего высокий уровень ее скрытности с учетом заданных ограничений на время передачи информации.
Техническим результатом, на достижение которого направлено настоящее техническое решение, является расширение функциональных возможностей за счет автоматического выполнения оценки ожидаемого времени задержки в передаче сигнала генерации об информации в канал связи, его передачи и преобразования в данные об информации с учетом выполненной оценки.
Ниже приведено описание предлагаемого технического решения.
Техническое решение - способ передачи информации от источника в приемник через передающий пункт, канал связи и приемный пункт, характеризующийся тем, что в передающем и приемном пункте:
- вырабатывают периодическую последовательность тактовых импульсов и периодическую последовательность сигналов начала сеанса;
- формируют и запоминают данные о служебной команде, которую определяют из условия несовпадения ее ни с одной из команд управления, передаваемой из источника информации.
В передающем пункте:
- формируют и запоминают сигнал генерации;
- формируют и запоминают данные о допустимом времени задержки в передаче сигнала генерации в канал связи и данные о скорости передачи данных в канале связи;
- принимают от источника информацию и запоминают в двоичном коде;
- определяют ожидаемое время задержки в передаче сигнала генерации в канал связи;
- производят его сравнение с допустимым временем задержки,
если ожидаемое время задержки не больше допустимого времени задержки, то формируют при поступлении очередного сигнала начала сеанса и соответствующего ему тактового импульса контрольную информацию в двоичном коде, начиная с единицы, увеличивая на единицу с поступлением каждого следующего тактового импульса, при этом производят сравнение двоичного кода контрольной информации, начиная с единицы, с двоичным кодом информации, поступившей от источника информации, прекращают формирование контрольной информации при совпадении этих кодов и передают сигнал генерации (информации) через канал связи в приемный пункт;
если ожидаемое время задержки больше допустимого времени задержки, то копируют данные о служебной команде, формируют при поступлении очередного сигнала начала сеанса и соответствующего ему тактового импульса контрольную информацию в двоичном коде, начиная с единицы, увеличивая на единицу с поступлением каждого следующего тактового импульса, при этом производят сравнение двоичного кода контрольной информации, начиная с единицы, с двоичным кодом служебной команды, прекращают формирование контрольной информации при совпадении этих кодов и передают сигнал генерации (служебной команды) в канал связи, а из канала связи передают в приемный пункт, после чего производят кодирование данных об информации, поступившей от источника, и передают их через канал связи в приемный пункт.
В приемном пункте:
- устанавливают состояние готовности к приему сигнала генерации;
- формируют при поступлении сигнала начала сеанса и соответствующего ему тактового импульса контрольную информацию в двоичном коде, начиная с единицы, увеличивая на единицу с поступлением каждого последующего тактового импульса, прекращают формирование контрольной информации при поступлении из канала связи сигнала генерации, запоминают сформированную ко времени поступления из канала связи сигнала генерации контрольную информацию;
- производят сравнение двоичного кода контрольной информации с двоичным кодом служебной команды, хранящейся в приемном пункте,
если сравниваемые коды не равны, то маркируют сформированную контрольную информацию как информацию, поступившую от источника, и передают в приемник, обнуляют контрольную информацию, при поступлении следующего сигнала начала сеанса вновь формируют контрольную информацию в двоичном коде, начиная с единицы, и так далее,
если сравниваемые коды равны, то маркируют сформированную контрольную информацию как служебную команду, поступившую из передающего пункта, устанавливают состояние готовности к приему информации в двоичном коде, принимают из канала связи кодированные данные об информации, декодируют, маркируют декодированные данные как информацию, поступившую от источника, передают их в приемник и устанавливают состояние готовности к приему сигнала генерации.
При этом:
- последовательности тактовых импульсов в передающем и приемном пункте синхронизированы с помощью внешней системы синхронизации, длительность интервалов времени между соседними сигналами синхронизации определяется длительностью тактовых импульсов в передающем и приемном пункте, периодом их следования и показателями стабильности канала связи;
- последовательности сигналов начала сеанса в передающем и приемном пункте формируются на основе тактовых импульсов соответственно в передающем и приемном пункте, а периоды следования сигналов начала сеанса в передающем и приемном пункте равны;
- при нулевой контрольной информации в приемном пункте информация, представляемая как информация, поступившая от источника в двоичном коде, в приемник не передается.
- поступающая от источника информация в двоичном коде, содержащая только единицы или только нули, игнорируется - поступление данной информации не инициирует действия по формированию новой контрольной информации;
- в передающем пункте от источника принимается информация в двоичном коде числом бит не менее двух;
- в передающем пункте информация, принятая из источника, и контрольная информация обнуляется после передачи сигнала генерации, обусловленного данной информацией, в канал связи;
- в передающем пункте принимается от источника новая информация, если передача сигнала генерации в канал связи, обусловленная принятой от источника предыдущей информацией, уже произведена, а предыдущая информация и контрольная информация, сформированная в соответствии с предыдущей информацией, обнулена;
- в передающем пункте игнорируются периодические сигналы начала сеанса, если принятая от источника предыдущая информация и контрольная информация, сформированная в соответствии с предыдущей информацией, не обнулена - поступление данных сигналов начала сеанса не инициирует действия по формированию новой контрольной информации;
- в приемном пункте игнорируются сигналы начала сеанса, если контрольная информация, сформированная до поступления данных сигналов в соответствии с сигналом генерации, не обнулена - поступление данных сигналов начала сеанса не инициирует действия по формированию новой контрольной информации;
- периоды поступления тактовых импульсов равны периодам передачи сигналов в канале связи.
2. Техническое решение, описанное выше в п. 1, в котором ожидаемое время задержки в передаче сигнала генерации в канал связи определяют как отношение числа 2 в степени, равной числу бит в данных об информации, поступившей из источника, к данным о скорости передачи данных в канале связи.
3. Техническое решение, описанное выше в п. 1, в котором число тактовых импульсов, поступающих в каждом из периодов поступления сигналов начала сеанса в передающем пункте и в приемном пункте, всегда меньше произведения допустимого времени задержки в передаче сигнала генерации в канал связи на скорость передачи данных в канале связи.
Настоящее техническое решение выполняется в соответствии с приведенным выше описанием и поясняется на чертежах:
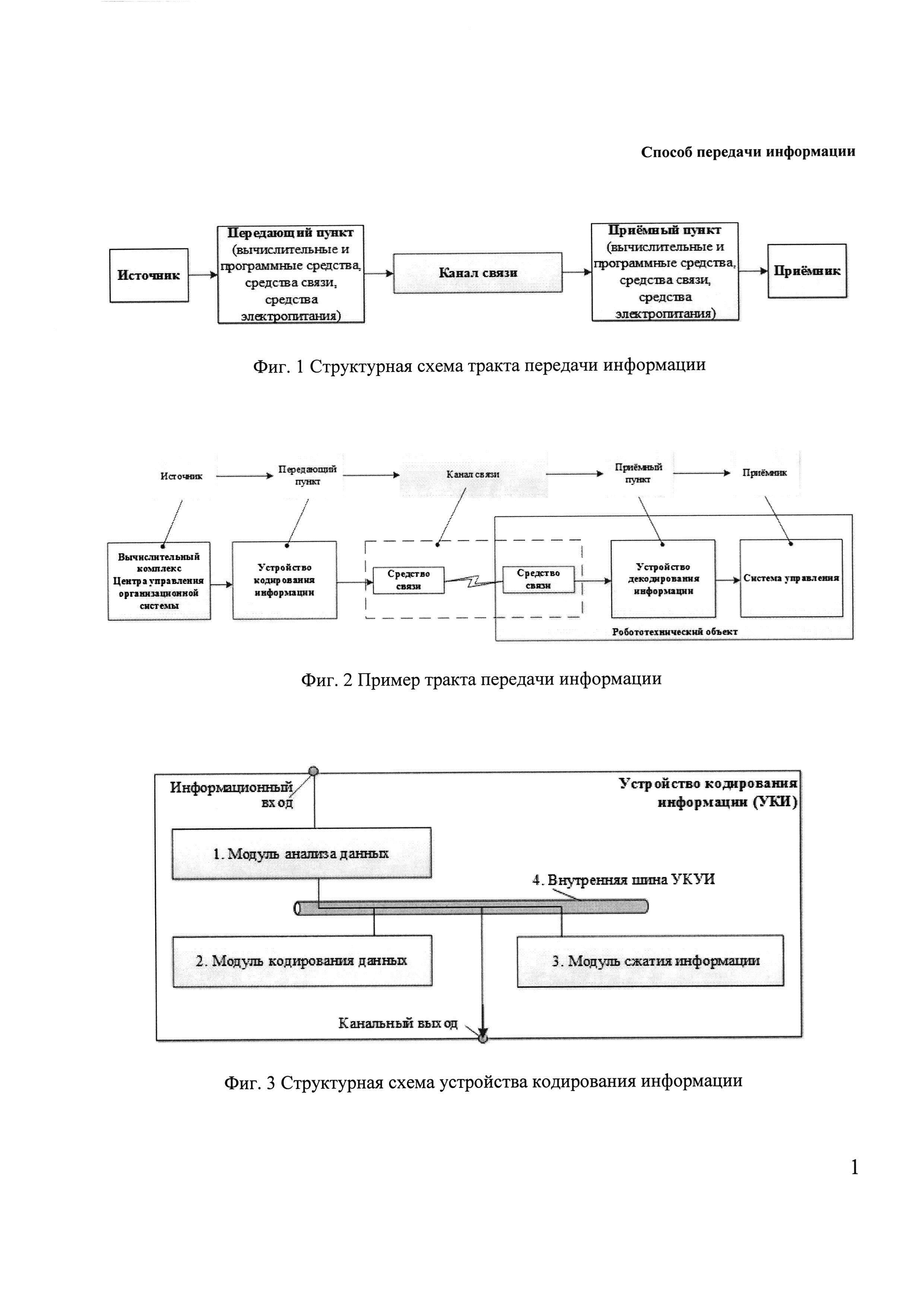
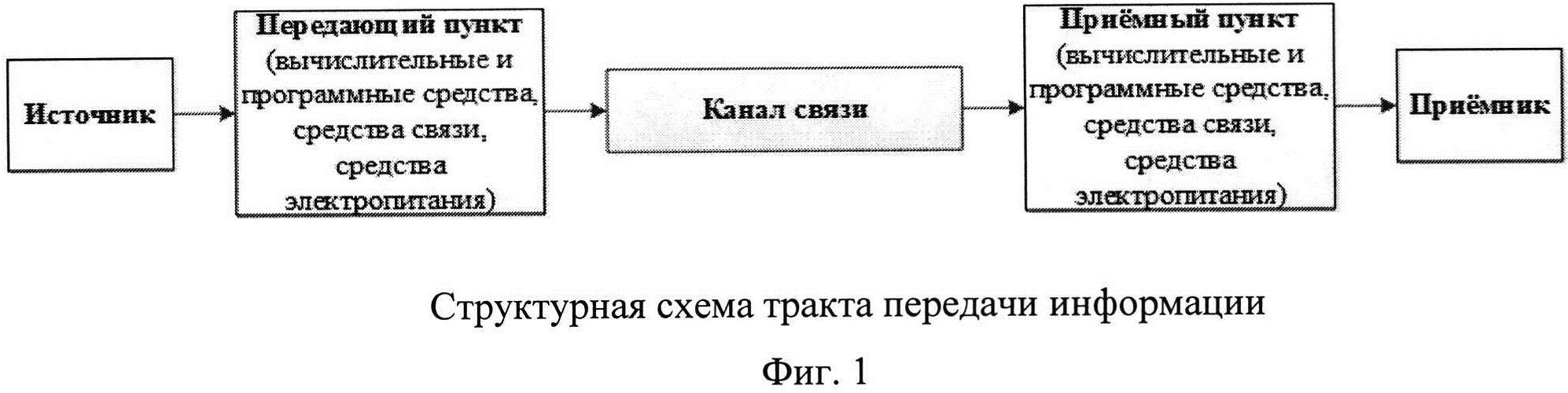
фиг. 1 - структурная схема тракта передачи управляющей информации;
фиг. 2 - пример тракта передачи информации;
фиг. 3 - устройство кодирования информации (УКИ);
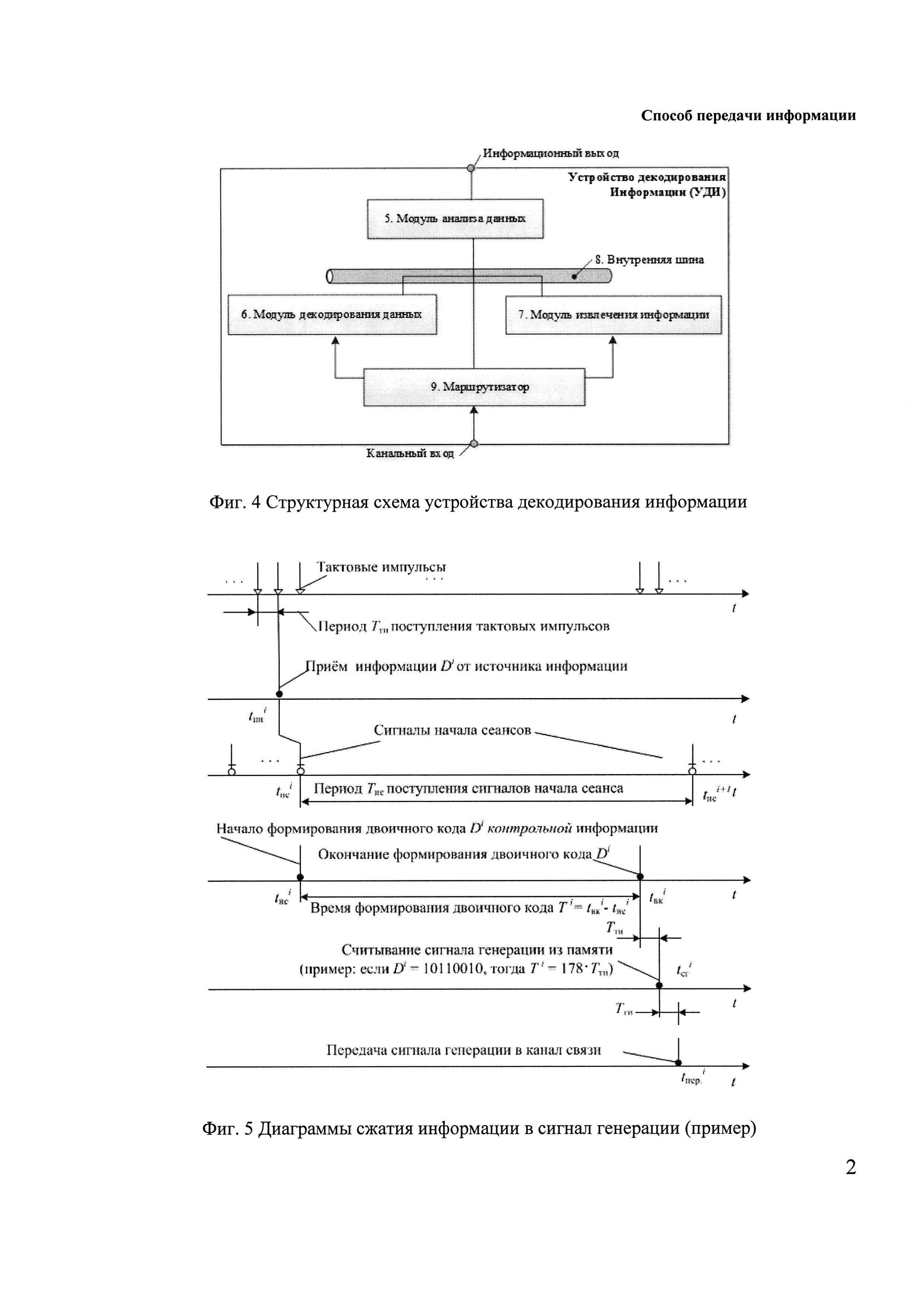
фиг. 4 - устройство декодирования информации (УДИ);
фиг. 5 - диаграммы сжатия информации в сигнал генерации;
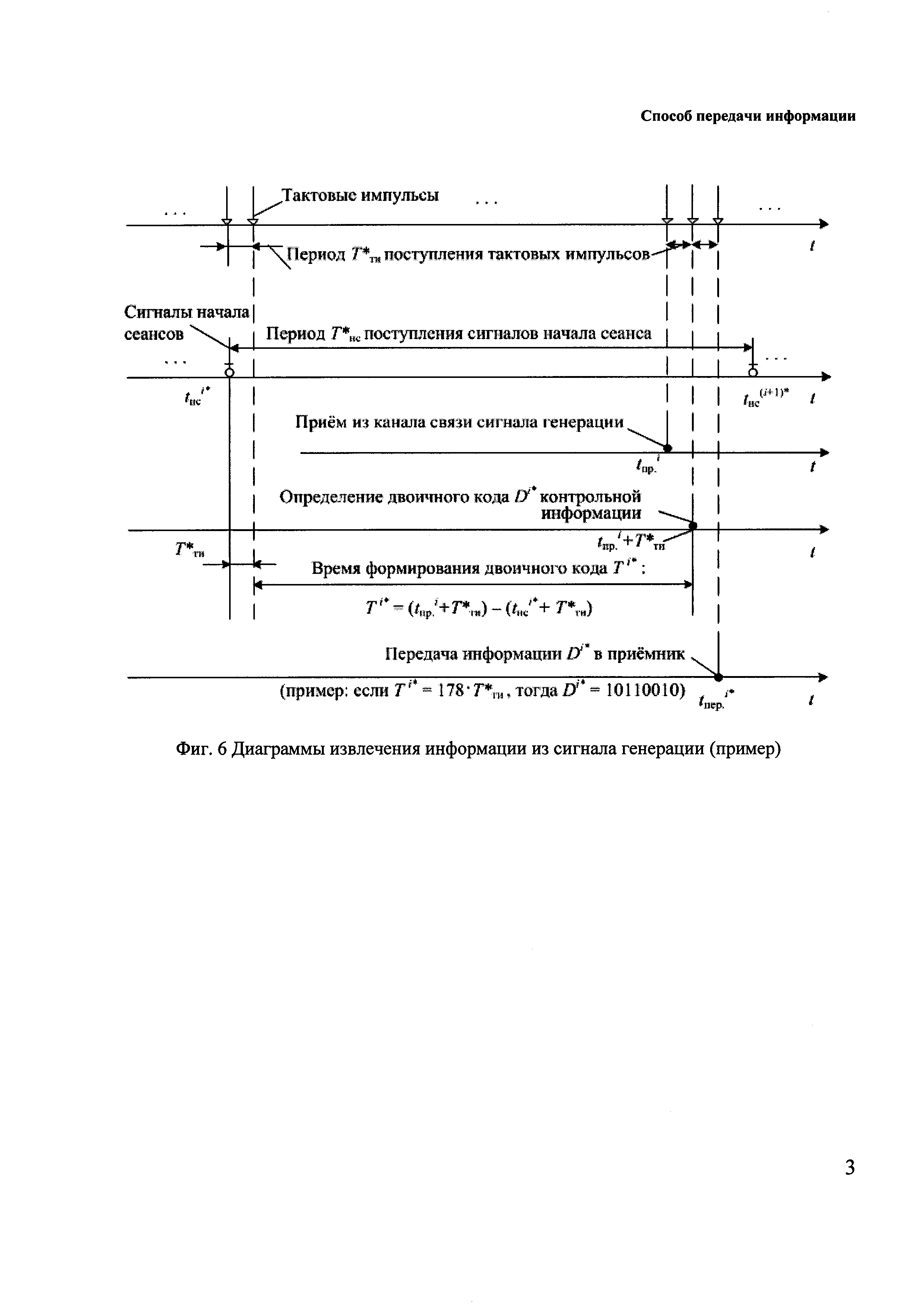
фиг. 6 - диаграммы извлечения информации из сигнала генерации.
Сущность технического решения и последовательность выполнения действий способа поясняется с помощью структурной схемы тракта передачи информации (фиг. 1) на примере тракта передачи информации (фиг. 2), в котором источником информации является вычислительный комплекс центра управления организационной системы [6], и на примере работы устройств кодирования (фиг. 3) и декодирования (фиг. 4) информации в качестве соответственно передающего и приемных пунктов. На фиг. 5 и фиг. 6 приведены диаграммы, иллюстрирующие действия соответственно по сжатию информации в единый сигнал в передающем пункте и по извлечению (преобразованию) информации из единого сигнала в приемном пункте.
На фиг. 3 изображена структура устройства кодирования информации:
1 - модуль анализа данных;
2 - модуль кодирования данных;
3 - модуль сжатия информации;
4 - внутренняя шина.
На фиг. 4 изображена структура устройства декодирования информации:
5 - модуль анализа данных;
6 - модуль декодирования данных;
7 - модуль извлечения информации;
8 - внутренняя шина;
9 - маршрутизатор.
Способ передачи информации может быть реализован следующим образом.
При подготовке к работе УКИ (фиг. 3).
В модуле 1 анализа данных:
- формируют и запоминают состояние SУКИ устройства кодирования информации, равное единице

при этом состоянии информация должна быть подвержена сжатию в модуле 3 сжатия информации;
- запоминают скорость V передачи данных по каналу связи и допустимое время Tдоп. передачи данных по каналу связи (допустимое время задержки сигнала генерации в передающем пункте);
- формируют и запоминают служебную команду, предназначенную для установления состояния SУКИ, равного нулю, при котором информация должна быть подвержена кодированию без сжатия в модуле 2 кодирования данных

Служебную команду определяют из условия несовпадения ее ни с одной из возможных команд управления в составе информации.
При подготовке к работе УДИ (фиг. 4).
В модуле 5 анализа данных:
- формируют и запоминают состояние SУКИ устройства декодирования информации, равное единице

при этом состоянии поступающая в маршрутизатор 9 информация в виде единого сигнала генерации должна быть подвержена извлечению в виде данных в модуле 7 извлечения информации;
- формируют и запоминают служебную команду, предназначенную для установления состояния SУКИ, равного нулю (zero), при котором поступающая в маршрутизатор 9 информация в виде кодированных данных должна быть подвержена декодированию в модуле 6 декодирования данных

при этом служебная команда тождественна по кодам служебной команде в модуле 1 анализа данных УКИ.
В маршрутизаторе 9 настраивают внутренний тракт передачи сигналов из средства связи через канальный вход на информационный вход маршрутизатора 9 и далее на информационный вход модуля 7 извлечения информации, что соответствует условию (3).
При промышленной эксплуатации выполняются следующие действия.
На передающей стороне в устройстве кодирования информации (фиг. 3):
Модуль 1 анализа данных:
- принимает с информационного входа данные об информации в двоичном коде, которые сформированы в вычислительном комплексе центра управления организационной системы (фиг. 2) [6], и запоминает;
- определяет объем В информации - число бит двоичных данных;
- определяет ожидаемое время Tож. задержки в передаче сигнала генерации в канал связи для состояния S=one (1), например, как отношение числа 2 в степени В к скорости V передачи данных по каналу связи

- если ожидаемое время Тож. задержки в передаче сигнала генерации не больше допустимого времени Tдоп. передачи данных по каналу связи

то передает данные об информации в модуль 3 сжатия информации для выполнения действий по формированию сигнала генерации об информации и передачи его в канал связи;
- если ожидаемое время Тож. задержки в передаче сигнала генерации больше допустимого времени Тдоп. передачи данных по каналу связи

то выполняет следующие действия:
- копирует данные о служебной команде и передает их в модуль 3 сжатия информации для выполнения действий по формированию сигнала о служебной команде и передаче его в канал связи.
Модуль 3 сжатия информации:
- при выполнении условия (6) принимает из модуля 1 данные об информации, запоминает их и выполняет действия в соответствии с техническим решением [7] по формированию и передаче сигнала генерации об информации в канал связи;
- при выполнении условия (7) принимает из модуля 1 данные о служебной команде, запоминает их и выполняет действия в соответствии с техническим решением [7] по формированию и передаче сигнала генерации о служебной команде в канал связи;
- передает сообщение в модуль 1 анализа данных о передаче сигнала генерации о служебной команде в канал связи.
На фиг. 5 приведены диаграммы, поясняющие действия технического решения [7] по формированию и передаче сигнала генерации в канал связи.
Модуль 1 анализа данных по получении из модуля 3 сообщения о передаче сигнала генерации о служебной команде в канал связи передает в модуль 2 кодирования данных данные об информации.
Модуль 2 кодирования данных принимает из модуля 1 данные об информации и выполняет следующие действия:
- производит кодирование данных об информации, что может быть выполнено на базе одной из известных технологий кодирования, основывающейся на коде с коррекцией ошибок [8] или на более сложных, например, [9, 10];
- передает кодированные данные об информации на канальный выход (к этому времени он будет свободен после передачи сигнала генерации о служебной команде) и далее в канал связи.
При этом:
- обмен данными между модулями УКИ и канальным выходом осуществляется с помощью внутренней шины 4;
- настройка модулей УКИ осуществляется с помощью рабочей станции администратора, подключаемой через внутреннюю шину 4 к внутренним входам и выходам модулей;
- электропитание модулей УКИ осуществляется от устройства электропитания, соединенного с входами электропитания модулей;
- модули УКИ могут быть выполнены на основе известных вычислительных средств, путем программного (по записанной или по замонтированной программе) исполнения приведенных в описании операций, например, на базе микроЭВМ, в частности:
- модуль 2 кодирования данных может быть реализован в виде микроЭВМ с компьютерными алгоритмами, выполняющими операции в соответствии с известным решением [8], или [9], или [10], или другим, в части действий по кодированию данных;
- модуль 3 сжатия информации может быть реализован в виде микроЭВМ с компьютерными алгоритмами, выполняющими операции по формированию сигнала генерации и передаче его в канал связи в соответствии с решением [3] и с решением [7] (в решении [7] этот сигнал обозначен, как «сигнал начала кодирования»), на фиг. 5 приведены временные диаграммы, поясняющие алгоритм работы модуля 3 сжатия информации.
На приемной стороне в устройстве декодирования информации (фиг. 4):
Модуль 7 извлечения информации:
- принимает из канала связи через канальный вход и маршрутизатор 5 сигнал генерации, т.к. исходное состояние УДИ соответствует условию (3);
- преобразует его в данные об информации, выполняя для этого действия в соответствии с техническим решением [3] по преобразованию единого сигнала генерации в данные об информации, и передает их через внутреннюю шину 8 в модуль 5 анализа данных.
На фиг. 6 приведены временные диаграммы, поясняющие действия технического решения [3] по приему и преобразованию сигнала генерации в данные об информации.
Модуль 5 анализа данных путем сравнения хранящихся в его памяти данных о служебной команде с принятыми данными об информации определяет - является ли информация служебной командой,
- если не является, то это означает, что принята информация, сформированная в источнике - в вычислительном комплексе центра управления организационной системы, и модуль 1 передает данные об информации через информационный выход в систему управления робототехнического объекта (фиг. 2);
- если принятая информация является служебной командой, то модуль 5 устанавливает состояние SУКИ=zero (4) и настраивает маршрутизатор 9 в состояние, при котором вслед за сигналом о служебной команде на канальный вход УДИ будут поступать кодированные данные об информации, которые будут передаваться через маршрутизатор 9 в модуль 6 декодирования данных.
Настройка маршрутизатора 5 осуществляется модулем 5 через внутреннюю шину 4.
Модуль 6 декодирования данных принимает поступающие из канала связи через канальный вход УКИ и маршрутизатор кодированные данные об информации, декодирует их и передает данные об информации через внутреннюю шину 8 в модуль 5 анализа данных.
Модуль 5 анализа данных передает данные об информации через информационный выход УДИ в систему управления робототехнического объекта и изменяет состояние SУКИ=zero (4) на исходное - SУКИ=one (3), подготавливая УДИ к следующему сеансу связи.
При этом:
- обмен данными между модулями УДИ и канальным входом осуществляется с помощью внутренней шины 8;
- настройка модулей УДИ осуществляется с помощью рабочей станции администратора, подключаемой через внутреннюю шину 4 к внутренним входам и выходам модулей;
- электропитание модулей УДИ осуществляется от устройства электропитания, соединенного с входами электропитания модулей;
- модули УДИ могут быть выполнены на основе известных вычислительных средств, путем программного (по записанной или по замонтированной программе) исполнения приведенных в описании действий, например, на базе микроЭВМ, в частности:
- модуль 6 декодирования данных может быть реализован в виде микроЭВМ с компьютерными алгоритмами, выполняющими операции в соответствии с известным решением [8], или [9], или [10], или другим, в части действий по декодированию данных;
- модуль 7 извлечения информации может быть реализован в виде микроЭВМ с компьютерными алгоритмами, выполняющими операции по извлечению (преобразованию) из сигнала генерации данных об информации в соответствии с решением [3] или с решением [7], на фиг. 6 приведены временные диаграммы, поясняющие работу модуля 3;
- маршрутизатор 5 может быть реализован в виде микроЭВМ с компьютерными алгоритмами, выполняющими операции по переключению трактов передачи в соответствии с известным решением [11];
- внутренние шины 4 в УКИ и 8 в УДИ могут быть реализованы как интерфейсы типа «общая шина».
В качестве внешней системы синхронизации последовательностей тактовых импульсов в передающем и приемном пункте может быть применена служба единого скоординированного времени (UTC) или единый источник синхронизации, например, радионавигационные системы Loran-C, GPS/ГЛОНАСС, «Чайка» и другие [12, 13].
Положительный эффект от применения способа заключается в повышении оперативности управления робототехническими объектами за счет исключения или сведения к минимуму случаев передачи управляющей информации за время, превышающее допустимое время.
Источники
[1] SU 1406805 A1, кл. H04J 3/17, опубл. 30.06.88 г. в бюл. №24.
[2] SU 1453607 A1, кл. H04J 3/24, опубл. 23.01.89 г. в бюл. №3.
[3] SU 1800631 А1, кл. H04J 3/24, опубл. 07.03.93 г. в бюл. №9.
[4] RU 2416873 C2, кл. Н04В 1/66, опубл. 20.04.2011 г. в бюл. №11.
[5] RU 2560820 C2, кл. G06F 7/76, опубл. 20.08.2015 г. в бюл. №23.
Дополнительные источники
[6] Центр управления организационной системы // RU 127493 U1, G05B 19/00, опубл. 27.04.2013, бюл. №. 12.
[7] Комплекс управления робототехническими объектами // RU 140887 U1, G05B 19/00, опубл. 20.05.2014 г., бюл. 14.
[8] Морелос-Сарагоса Р. Искусство помехоустойчивого кодирования. Методы, алгоритмы, применение // пер. с англ. В.Б. Афанасьева. - М.: Техносфера, 2006. - 320 с.
[9] Способ кодирования управляющей информации в системе связи // RU 2498517 C2, H04L 27/2, опубл. 10.11.2013 г., бюл. 31.
[10] Способ кодирования многословной информации // RU 2224358 C2, Н03М 13/27, опубл. 20.02.2004, бюл. 5.
[11] Устройство сеансовой связи // SU 1481905 A1, кл. Н04В 3/46, 1/74, опубл. 23.05.89 г. в бюл. №19.
[12] Н. Слепов. Синхронизация цифровых сетей. Методы, терминология, аппаратура // Электроника НТБ, №2, 2002.
[13] Бабокин Е.И. и др. Радионавигационное обеспечение России на пороге XXI века // Технологическое оборудование и материалы, №12, 1997.
Способ поддержки деятельности организационной системы
Система ситуационно-аналитических центров организационной системы
Способ передачи информации
Система управления деятельностью организационных систем
Способ передачи информации
Центр управления робототехническими объектами
Интегрированная система управления
Способ передачи команд управления
Преобразователь унарного сигнала в парафазный сигнал с нулевым спейсером
Преобразователь унарного сигнала в парафазный сигнал с единичным спейсером
Способ поддержки деятельности организационной системы
Система ситуационно-аналитических центров организационной системы
Способ передачи информации
Система управления деятельностью организационных систем
Способ передачи информации
Центр управления робототехническими объектами
Интегрированная система управления
Способ передачи команд управления
Способ определения объектов инноваций в информационных системах
Система дистанционного управления передающим радиоцентром

