ДЕТЕКТОРНЫЙ УЗЕЛ ДЛЯ ПЕРЕДВИЖНОЙ РАБОЧЕЙ УСТАНОВКИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к детекторному узлу для передвижной рабочей установки.
Изобретение относится также к способу определения взаимного положения или взаимного состояния движения по меньшей мере двух конструктивных элементов передвижной рабочей установки.
Уровень техники
Определение абсолютного или относительного положения конструктивных элементов передвижных рабочих установок, таких как лесозаготовительные машины, необходимо, например, для управления машинами, улучшения эргономики рабочего места оператора, обеспечения безопасной и эффективной работы и регулирования сил, воздействию которых подвергается машина. Известны различные решения по определению положения конструктивных элементов. Эти решения часто основаны на контактном и (или) механическом соединении, например на измерениях угла шарнирного соединения между двумя конструктивными элементами с помощью датчика угла поворота, устанавливаемого непосредственно в шарнире, такого как резольвер, или, альтернативно, на измерениях положения при линейном перемещении линейного исполнительного механизма, управляющего шарнирным соединением, с помощью резольверов или потенциометров, например. Однако все известные решения создают проблемы, вызываемые обычно применяемыми способами измерения и измерительными устройствами, а также способами и условиями эксплуатации лесозаготовительных машин и (или) их совместимостью. Лесозаготовительные машины применяют, например, на пересеченной, часто наклонной и труднопроходимой местности, где они подвергаются механическим воздействиям, оказываемым, например, ветвями, стволами или пнями, а также различного рода вибрациям, при этом стрелы и грузы, расположенные на них, прикладывают к машинам силы и механические напряжения. Кроме того, условия окружающей среды, такие как большие изменения наружной температуры, а также влажность и загрязнения, могут повредить датчики, в частности, соединенные с конструкциями лесозаготовительной машины, или управляющую электронику машины.
Определение углового положения с помощью различных традиционных детекторов наклона создает разнообразные проблемы. Проблема, связанная с детекторами на основе датчика ускорения, состоит в том, что другие виды ускорения, направленные на датчик в дополнение к ускорению свободного падения, вызывают искажение углового значения. Поэтому для уменьшения этих искажений обычно требуется интенсивная фильтрация сигнала, которая, в свою очередь, вызывает замедленную реакцию отфильтрованного сигнала на изменения угла. Детекторы, основанные на определении угловой скорости, такие как гироскопические измерительные устройства, в свою очередь, обнаруживают скорость изменения угла, а не абсолютное положение относительно направления ускорения, вызванного, например, вектором тяготения. Вследствие этого погрешности, вызванные неидеальностью измерения и измерительных узлов, накапливаются в процессе использования при определении углового положения на основе угловой скорости.
Раскрытие изобретения
Целью настоящего изобретения является предложение нового усовершенствованного детекторного узла и способа определения взаимного положения или взаимного состояния движения по меньшей мере двух конструктивных элементов передвижной рабочей установки.
Решение согласно настоящему изобретению отличается признаками, раскрытыми в независимых пунктах формулы изобретения.
В решении, предложенном в настоящем описании, раскрыт детекторный узел для определения взаимного положения или взаимного состояния движения по меньшей мере двух конструктивных элементов передвижной рабочей установки, причем конструктивные элементы выполнены с возможностью вращения относительно друг друга по меньшей мере в одном направлении вращения. Этот детекторный узел содержит по меньшей мере детекторы и средства обработки данных. Эти детекторы могут быть расположены в каждом указанном конструктивном элементе и быть использованы для определения по меньшей мере в одном направлении измерения по меньшей мере двух различных измеряемых параметров, первого и второго измеряемых параметров, для каждого направления измерения, позволяя получать по меньшей мере информацию о положении или состоянии движения конкретного конструктивного элемента, для данного конструктивного элемента относительно по меньшей мере одного заданного углового опорного сигнала. Средства обработки данных, в свою очередь, могут принимать первый и второй сигналы измерения, описывающие первый и второй измеряемые параметры и передаваемые детекторами, и определять положение или состояние движения конкретного конструктивного элемента, для каждого конструктивного элемента на основе первого и второго сигналов измерения. Кроме того, средства обработки данных могут определять по меньшей мере взаимное положение или взаимное состояние движения конструктивных элементов на основе этой информации о положении или состоянии движения конкретного конструктивного элемента.
Во втором решении, предложенном в настоящем описании, способ определения взаимного положения или взаимного состояния движения по меньшей мере двух конструктивных элементов передвижной рабочей установки, выполненных с возможностью вращения относительно друг друга по меньшей мере в одном направлении вращения, содержит по меньшей мере следующие шаги. Определяют по меньшей мере в одном направлении измерения по меньшей мере два различных измеряемых параметра, первый и второй измеряемые параметры, для каждого направления измерения с помощью детекторов, причем измеряемые параметры позволяют получать по меньшей мере информацию о положении или состоянии движения конкретного конструктивного элемента, относительно по меньшей мере одного заданного углового опорного сигнала. Принимают с помощью средств обработки данных первый и второй сигналы измерения, описывающие первый и второй измеряемые параметры и передаваемые детекторами. Определяют каждый фрагмент информации о положении или состоянии движения конкретного конструктивного элемента на основе первого и второго сигналов измерения, после чего определяют по меньшей мере взаимное положение или взаимное состояние движения конструктивных элементов на основе этой информации о положении или состоянии движения конкретного конструктивного элемента.
В третьем решении передвижная рабочая установка, такая как лесозаготовительная машина, содержит один из раскрытых детекторных узлов.
Идея, лежащая в основе настоящего изобретения, заключается в том, что по меньшей мере информацию о положении или состоянии движения конкретного конструктивного элемента получают для двух конструктивных элементов в каждом направлении измерения с помощью по меньшей мере двух различных измеряемых параметров.
Преимущество настоящего решения заключается, например, в том, что такой детекторный узел и способ обеспечивают по меньшей мере более точное, более надежное и более быстрое реагирование на информацию о взаимном положении или состоянии движения для двух конструктивных элементов. Другие преимущества решения раскрыты в подробном описании.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что измеряемые параметры для каждого направления измерения и для каждого конструктивного элемента включают в себя по меньшей мере две из следующих величин: ускорение, угловую скорость и угловое ускорение.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что для каждого направления измерения и для каждого конструктивного элемента детекторы содержат по меньшей мере датчик ускорения или инклинометр, а также датчик угловой скорости или датчик углового ускорения.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что для каждого направления измерения и для каждого конструктивного элемента детекторы включают детектор, выполненный с возможностью измерения по меньшей мере направления, перпендикулярного направлению ускорения, вызванного вектором тяготения, такого как компасный румб, или магнитное поле.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что средства обработки данных выполнены с возможностью получения по меньшей мере уточненной информации о положении или состоянии движения конкретного конструктивного элемента, для двух конструктивных элементов таким образом, что информация о положении или состоянии движения конструктивного элемента получена по отдельности на основе первого измеряемого параметра и второго измеряемого параметра, и чтобы погрешность измерения информации о положении или состоянии движения, получаемой на основе первого измеряемого параметра, корректируется с использованием соответствующей информации о положении или состоянии движения, получаемой на основе второго измеряемого параметра, в качестве эталонной информации.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что средства обработки данных выполнены с возможностью получения по меньшей мере уточненной информации о взаимном положении или состоянии движения для двух конструктивных элементов на основе уточненной информации о положении или движении конкретного конструктивного элемента.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что данные о взаимном положении или взаимном состоянии движения содержат по меньшей мере один фрагмент следующей информации: информацию об абсолютной разности положения конструктивных элементов, информацию по меньшей мере об одном угле шарнирного соединения по меньшей мере одной соединительной конструкции, взаимосвязывающей конструктивные элементы, информацию об угловой скорости абсолютной разности положения конструктивных элементов или ее производной, информацию об угловой скорости по меньшей мере одного угла шарнирного соединения по меньшей мере одной соединительной конструкции, взаимосвязывающей конструктивные элементы, или ее производной, или информацию о положении или состоянии движения исполнительного механизма или конструктивного элемента, образованного по меньшей мере одной соединительной деталью.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что заданный угловой опорный сигнал представляет собой одну из следующих величин: ускорение, вызванное вектором тяготения, направление, перпендикулярное ускорению, вызванному вектором тяготения, такое как компасный румб, или магнитное поле.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что конструктивные элементы содержат по меньшей мере две рамные части передвижной рабочей установки, а также в том, что информация о взаимном положении этих конструктивных элементов содержит по меньшей мере информацию об угле шарнирного соединения.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что конструктивные элементы содержат по меньшей мере одну секцию стрелы передвижной рабочей установки или кабину управления передвижной рабочей установки.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что средства обработки данных выполнены с возможностью формирования сигнала предупреждения об опасности потери устойчивости, когда определяемое взаимное положение или взаимное состояние движения конструктивных элементов превышает заданное предельное значение или меньше его.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что по меньшей мере уточненную информацию о положении или состоянии движения конкретного конструктивного элемента, для двух конструктивных элементов получают таким образом, что информация о положении или состоянии движения конструктивного элемента получена по отдельности на основе первого измеряемого параметра и второго измеряемого параметра, и чтобы погрешность измерения информации о положении или состоянии движения, получаемой на основе первого измеряемого параметра, корректировалась с использованием соответствующей информации о положении или состоянии движения, получаемой на основе второго измеряемого параметра, в качестве эталонной информации.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что по меньшей мере один кинематический параметр по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, определяют, используя определяемое взаимное положение или взаимное состояние движения конструктивных элементов.
Идея, лежащая в основе раскрытого варианта осуществления, заключается в том, что кинематический параметр представляет собой одну из следующих величин: абсолютную разность положения конструктивных элементов, по меньшей мере один угол шарнирного соединения по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, угловую скорость абсолютной разности положения конструктивных элементов или ее производную, угловую скорость по меньшей мере одного угла шарнирного соединения по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, или ее производную, или положение или состояния движения исполнительного механизма или конструктивного элемента, образованного по меньшей мере одной указанной соединительной деталью.
Краткое описание чертежей
Некоторые варианты настоящего изобретения будут раскрыты более подробно со ссылкой на прилагаемые чертежи.
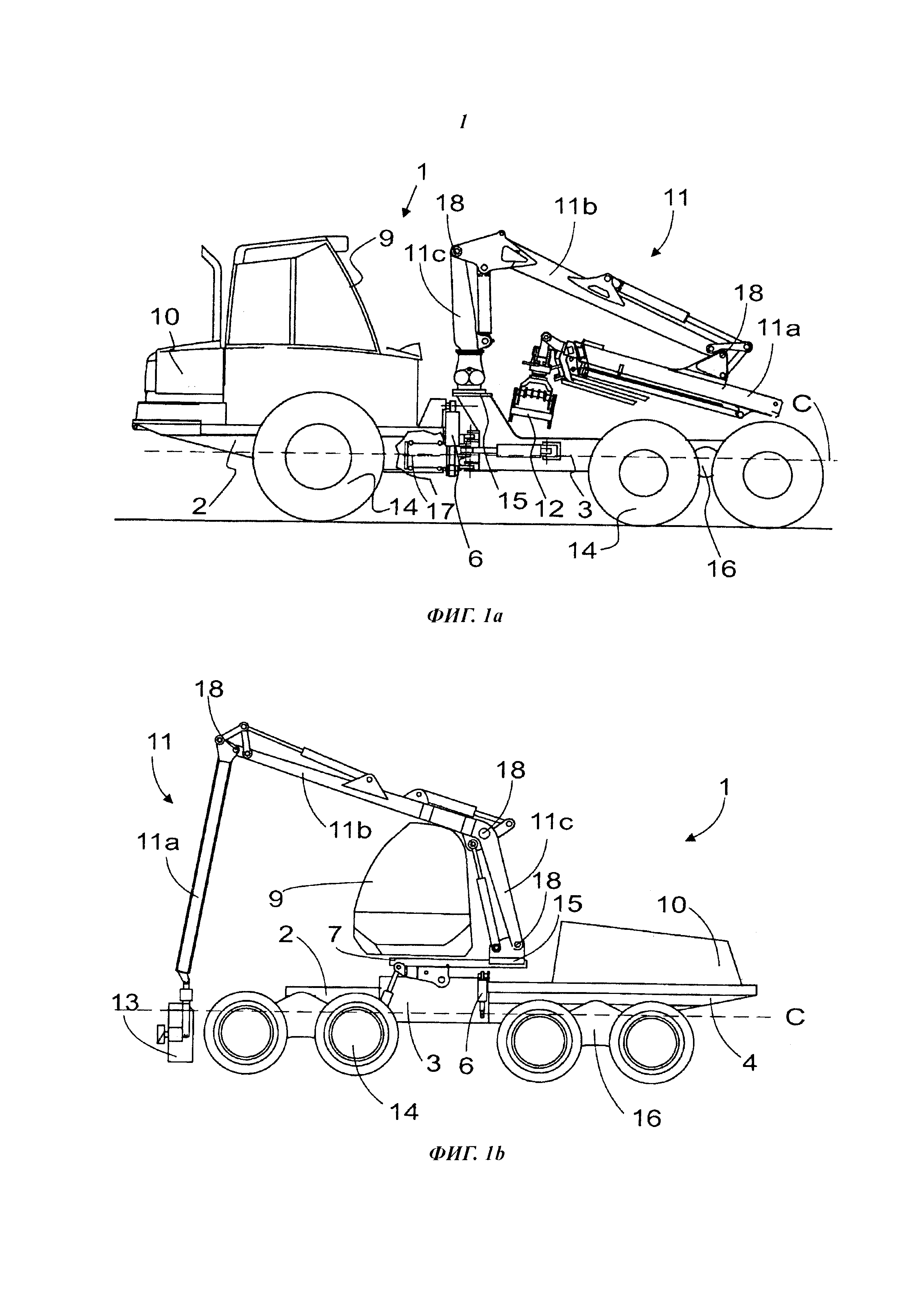
На ФИГ. 1а и ФИГ. 1b схематически показаны две лесозаготовительные машины.
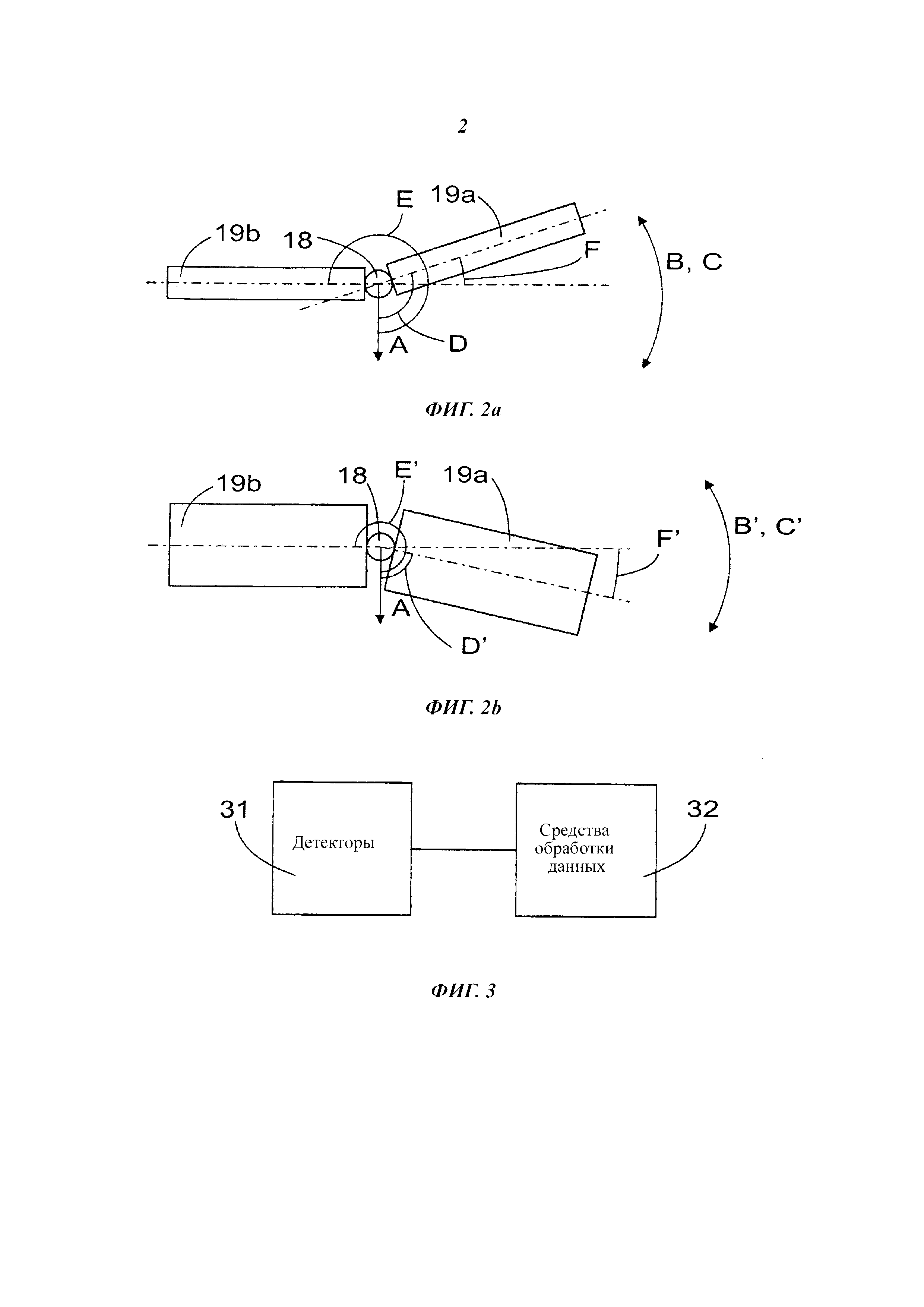
На ФИГ. 2а и ФИГ. 2b схематически представлены с различных сторон некоторые концепции и направления, относящиеся к детекторному узлу.
На ФИГ. 3 схематически представлен детекторный узел.
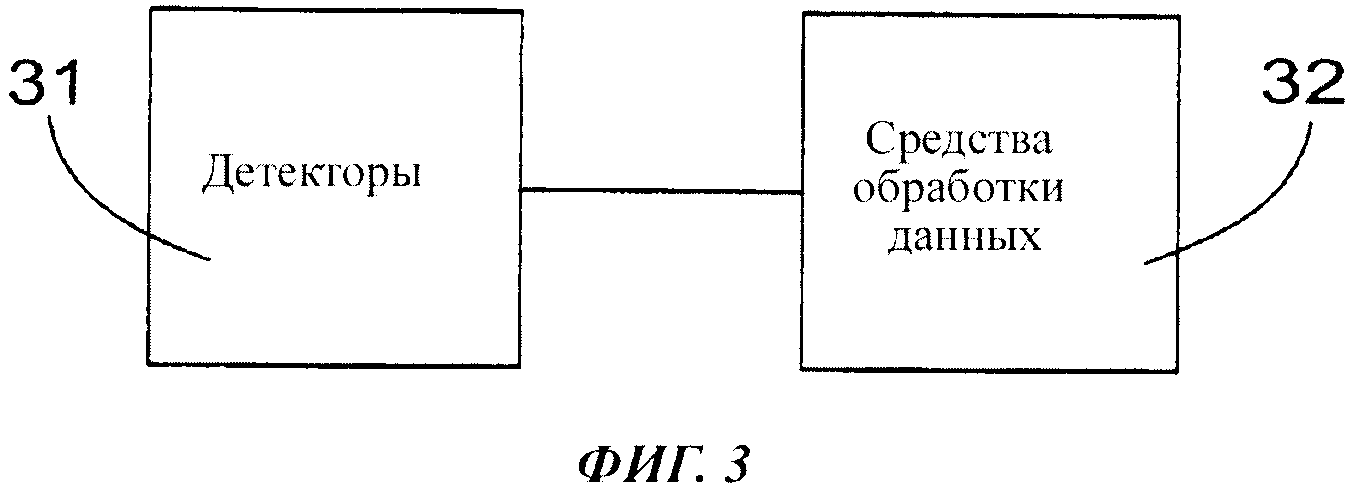
На ФИГ. 4 схематически показан способ определения взаимного положения или взаимного состояния движения двух конструктивных элементов передвижной рабочей установки.
Для ясности некоторые варианты осуществления настоящего изобретения показаны на чертежах упрощенно. Одинаковые позиционные обозначения на чертежах указывают на одинаковые элементы.
Осуществление изобретения
На ФИГ. 1а и ФИГ. 1b схематически показаны две лесозаготовительные машины в качестве примеров передвижных рабочих установок 1. Одинаковые позиционные обозначения на чертежах указывают на детали, имеющие одинаковую конструкцию и (или) назначение. Передвижная рабочая установка 1, такая как лесозаготовительная машина, форвардер в случае ФИГ. 1а и лесозаготовительный комбайн в случае ФИГ. 1b, может содержать рамные части, при этом в случае ФИГ. 1а - две рамные части 2, 3, соединенные вместе при помощи шарнирного соединения. Лесозаготовительная машина 1, как правило, содержит кабину 9 управления, расположенную на одной рамной части 2, 3, 4, по меньшей мере один источник 10 питания, расположенный на той же рамной части 2, 3, 4, что и кабина управления, или на другой рамной части, и предназначенный для вырабатывания энергии с целью перемещения и управления лесозаготовительной машиной и (или) установленными на ней инструментами. Лесозаготовительная машина 1 содержит также инструменты, такие как стреловой узел 11, который может содержать одну или несколько секций 11а, 11b и 11с стрелы, сочлененных шарнирно с помощью шарниров 18 друг с другом и (или) с рамной частью, как правило, расположенный на одной или нескольких рамных частях 2, 3, 4, и грейфер 12 прикрепленный к нему на ФИГ. 1а, или харвестерную головку 13, прикрепленную к нему на ФИГ. 1b. Такие передвижные лесозаготовительные машины 1 содержат также средства для перемещения лесозаготовительной машины, например колеса 14, опорные узлы, ножные механизмы или другие хорошо известные элементы для перемещения. Кроме того, в зависимости от варианта осуществления и функционального назначения лесозаготовительные машины могут также содержать другие многочисленные хорошо известные конструктивные элементы. Передвижные рабочие установки 1 другого типа часто содержат конструктивные элементы аналогичного назначения; однако при этом реальные инструменты и их соединительные конструкции, как правило, различаются в соответствии с типом установки и функциональным назначением. Для ясности в настоящем описании и на относящихся к нему других чертежах эти конструктивные элементы обозначены номерами позиций 19, 19а, и 19b.
Как правило, по меньшей мере некоторые из вышеупомянутых или других конструктивных элементов передвижной рабочей установки 1 выполнены с возможностью поворота относительно друг друга по меньшей мере в одном направлении вращения. Обычно это реализуется путем монтирования конструктивных элементов друг с другом с помощью шарнирного соединения по меньшей мере с одной степенью свободы, однако в других вариантах осуществления различные конструктивные элементы могут также монтироваться друг с другом при помощи шарниров с большим количеством степеней свободы, при этом конструктивные элементы, например, такие как секции стрелы телескопического типа, могут также перемещаться друг относительно друга, например, в направлении прямолинейного перемещения. Положение и (или) состояние движения этих конструктивных элементов относительно углового опорного сигнала, например ускорения, вызванного вектором тяготения, и, в частности, его направления, а также относительно друг друга можно использовать для многих целей в процессе эксплуатации и управления передвижной рабочей установкой, например для управления рабочим состоянием установки или для контроля или управления стреловым узлом или секцией стрелы, кабиной управления или другим конструктивным элементом относительно друг друга, рамной части лесозаготовительной машины или другого конструктивного элемента лесозаготовительной машины или, например, для предупреждения оператора машины о приближающейся опасности потери устойчивости машины. В данном контексте термин «состояние движения» относится к конструктивному элементу, имеющему по меньшей мере одно направление вращения по отношению к направлению или направлениям контроля, в частности, находящемуся в неподвижном состоянии или в движении, которое, в свою очередь, может представлять собой движение с замедлением, равномерное движение или движение с ускорением.
На ФИГ. 2а и 2b с различных сторон схематически показаны направление А углового опорного сигнала, направление вращения В, В', направление измерения С, С' и угловое положение D, D' конструктивного элемента 19а относительно направления заданного углового опорного сигнала, угловое положение Е, Е' конструктивного элемента 19b относительно направления углового опорного сигнала, а также взаимное угловое положение F, F' между конструктивными элементами 19а и 19b. Центральные линии конструктивных элементов 19а и 19b показаны пунктиром. Конструктивные элементы 19а и 19b соединены вместе при помощи шарнира 18, имеющего по меньшей мере одну степень свободы. На ФИГ. 2а показан вид сбоку, при этом направление А углового опорного сигнала может представлять собой направление ускорения, вызванного, например, вектором тяготения. На ФИГ. 2b показан вид сверху, при этом направление А углового опорного сигнала может представлять собой направление, перпендикулярное ускорению, вызванному вектором тяготения, например компасный румб.
Направление измерения и направления вращения предпочтительно являются по существу параллельными, как показано на ФИГ. 2а и ФИГ. 2b, но, в других вариантах осуществления, в зависимости от функционального назначения измерительной информации и, например, конструктивных соображений, они могут также отличаться друг от друга. Естественно, что конструктивные элементы 19а и 19b могут быть соединены вместе при помощи шарнира 18, имеющего по меньшей мере две степени свободы. Тот же детекторный узел может также быть выполнен с возможностью измерения углового положения и (или) состояния движения конструктивных элементов в направлении углового опорного сигнала и относительно друг друга более чем в одном направлении измерения, например, по меньшей мере в двух направлениях измерения С, С'. Для специалиста в данной области техники очевидно, что определение углового положения и (или) состояния движения можно осуществить с помощью множества различных конфигураций детекторов с использованием для каждого конструктивного элемента детекторов, обнаруживающих один или несколько измеряемых параметров таким образом, чтобы каждый детектор имел возможность обнаружения по меньшей мере одного измеряемого параметра в одном или нескольких направлениях измерения.
В различных вариантах осуществления, например, ускорение, вызванное вектором тяготения, направление, перпендикулярное направлению ускорения, вызванного вектором тяготения, такое как компасный румб, магнитное поле Земли или другой подходящий естественный или искусственный угловой опорный сигнал, относительно которого определяется положение и (или) состояние движения конструктивных элементов, может быть задано в качестве углового опорного сигнала. В некоторых вариантах осуществления для определений положений и (или) состояний движения той же пары конструктивных элементов или других пар конструктивных элементов можно также использовать больше одного углового опорного сигнала.
На ФИГ. 3 схематически показан детекторный узел для передвижной рабочей установки. Рассматриваемый детекторный узел содержит детекторы 31, которые могут быть размещены по меньшей мере в двух конструктивных элементах, выполненных с возможностью вращения относительно друг друга по меньшей мере в одном направлении вращения, и при этом могут быть расположены в каждом указанном конструктивном элементе 19, причем детекторы 31 могут быть выполнены с возможностью определения по меньшей мере в одном направлении измерения по меньшей мере двух различных измеряемых параметров, первого и второго параметров, для каждого направления измерения. Эти измеряемые параметры можно выбирать таким образом, чтобы они позволяли получать информацию о положении или состоянии движения конкретного конструктивного элемента, для конструктивного элемента 19 относительно по меньшей мере одного заданного углового опорного сигнала. Рассматриваемый детекторный узел содержит также по меньшей мере одни средства 32 обработки данных, например блок управления, который может быть выполнен с возможностью приема по меньшей мере первого и второго сигналов измерения, описывающих первый и второй измеряемые параметры и формируемых детекторами 31. Кроме того, средства 32 обработки данных могут быть выполнены с возможностью получения, на основе первого и второго измеряемых параметров, информации о положении или состоянии движения конкретного конструктивного элемента, для каждого конструктивного элемента 19, а также определения по меньшей мере взаимного положения и (или) взаимного состояния движения двух конструктивных элементов 19 на основе этой информации о положении или состоянии движения конкретного конструктивного элемента. Информацию о положении и (или) состоянии движения конкретного конструктивного элемента, предпочтительно можно определять относительно ускорения, вызванного, например, вектором тяготения. Направление измерения предпочтительно по существу параллельно направлению вращения.
В одном варианте осуществления по меньшей мере один детектор 31 может быть выполнен с возможностью непосредственного определения измеряемого параметра, описывающего требуемую информацию о положении и (или) состоянии движения, и в этом случае информация о положении и (или) состоянии движения может быть получена непосредственно на основе сигнала измерения, описывающего рассматриваемый измеряемый параметр. В некоторых вариантах осуществления по меньшей мере один детектор 31 может быть выполнен с возможностью определения измеряемого параметра, на основе которого путем вычислений можно получить требуемую информацию о положении и (или) состоянии движения, например, с помощью интегрирования или другого подходящего алгоритма. В некоторых других вариантах осуществления все детекторы 31 могут быть выполнены с возможностью определения измеряемых параметров, на основе которых требуемую информацию о положении и (или) состоянии движения можно получить путем вычислений. Иными словами, информацию о положении и (или) состоянии движения можно получить на основе каждого измеряемого параметра и описывающего его сигнала измерения, непосредственно или путем вычислений.
В одном варианте осуществления средства обработки данных выполнены с возможностью получения по меньшей мере уточненной информации о положении или состоянии движения конкретного конструктивного элемента, для двух конструктивных элементов таким образом, чтобы информация о положении или состоянии движения конструктивного элемента была получена по отдельности на основе первого измеряемого параметра и второго измеряемого параметра, и чтобы погрешность измерения информации о положении или состоянии движения, полученной на основе первого измеряемого параметра, корректировалась с использованием соответствующей информации о положении или состоянии движения, полученной на основе второго измеряемого параметра, в качестве эталонной информации. В еще одном варианте осуществления средства обработки данных могут также быть выполнены с возможностью получения по меньшей мере уточненной информации о взаимном положении или состоянии движения для двух конструктивных элементов на основе уточненной информации о положении или движении конкретного конструктивного элемента.
В некоторых вариантах осуществления информация о положении и (или) состоянии движения может также быть скорректирована по другому измерению, детектору или информации о состоянии, или по другой соответствующей информации, например информации об ускорении передвижной рабочей установки.
В одном варианте осуществления измеряемые параметры для каждого направления измерения и для каждого конструктивного элемента включают в себя по меньшей мере две из следующих величин: ускорение, угловую скорость и угловое ускорение.
В одном варианте осуществления детекторный узел содержит детекторы для определения углового положения и (или) углового ускорения каждого конструктивного элемента, контролируемого относительно заданного углового опорного сигнала по меньшей мере в одном направлении измерения. В одном варианте осуществления эти детекторы могут для каждого конструктивного элемента и контролируемого направления измерения содержать по меньшей мере два из следующих детекторов: датчик ускорения, датчик угловой скорости и датчик углового ускорения. Особенно предпочтительно, если детекторный узел содержит датчик ускорения или инклинометр, а также датчик угловой скорости и (или) датчик углового ускорения. В другом варианте осуществления для каждого направления измерения и для каждого контролируемого конструктивного элемента эти детекторы могут содержать детектор, определяющий по меньшей мере направление, перпендикулярное направлению ускорения, вызванного вектором тяготения, такое как компасный румб, или магнитное поле. В других вариантах осуществления эти детекторы различного типа и (или) с различными угловыми опорными сигналами могут комбинироваться соответствующим способом.
Определение по меньшей мере двух различных измеряемых параметров для любого направления измерения и для любого конструктивного элемента позволяет быстро и точно компенсировать погрешности измерения, возникающие в одном измеряемом параметре и вызываемые различными помехами. В этом случае, комбинируя сигналы датчика ускорения и (или) датчика угловой скорости и (или) датчика углового ускорения с целью компенсации погрешностей измерения, можно надежно вычислить угловое положение и (или) угловую скорость каждого конструктивного элемента. Определение углового положения и угловой скорости на основе сигналов измерения датчика ускорения, датчика угловой скорости или датчика углового ускорения хорошо известно, поэтому нет необходимости подробнее объяснять его в настоящей заявке. Работа датчика ускорения или инклинометра основана на обнаружении ускорения движения и ускорения свободного падения датчика, поэтому, в связи с раскрытыми решениями, типы этих датчиков соответствуют друг другу и могут считаться равноценными в контексте раскрытых решений. Применение этих детекторов обеспечивает, например, то преимущество, что информацию о положении и (или) состоянии движения можно получать с помощью небольших, недорогих, надежных детекторов с длительным сроком службы, которые, кроме того, часто можно свободно располагать в контролируемом конструктивном элементе. По сравнению с настоящими решениями, износостойкие датчики угла шарнирного соединения и датчики линейного положения, например, являются дорогостоящими.
В одном варианте осуществления вместо ускорения, вызванного вектором тяготения, и его направления положение и (или) состояние движения конструктивного элемента могут определять по отношению к другому направлению, например компасному румбу. При определении положения и (или) состояния движения конструктивного элемента, например, по отношению к компасному румбу можно применять, например, электрический компас или данные спутниковой навигации во время движения. Первый измеряемый параметр, описывающий положение и (или) состояние движение конструктивного элемента, может затем быть определен, например, с помощью какого-либо другого раскрываемого здесь детекторного узла и (или) способа.
В различных вариантах осуществления детекторы могут, таким образом, представлять собой различные устройства, подходящие для обнаружения измеряемых параметров, например датчики или измерительные устройства.
Преимущество настоящего детекторного узла заключается в том, что контроль по меньшей мере двух различных измеряемых параметров позволяет получать информацию по меньшей мере о положении и (или) состоянии движения, относящуюся к одному конструктивному элементу, при этом первый измеряемый параметр можно использовать в качестве исходного измерения для второго измеряемого параметра и, соответственно, полученную информацию измерения - в качестве эталонной информации для корректирования погрешностей измерения, связанных со вторым измеряемым параметром. Это позволяет эффективно и не снижая скорости измерения корректировать погрешности измерения, связанные с различными способами измерения, такие как чувствительность к вибрациям, ориентированным в направлении измерения при измерении информации об углах с помощью датчика абсолютных значений, такого как инклинометр, и накапливание погрешностей, связанное с определением путем вычислений. С другой стороны, при этом удается избежать снижения скорости измерения, связанного с интенсивной фильтрацией сигнала измерения, и погрешностей результата измерения, вызванных замедленностью реакции, а также погрешностей измерения, связанных с высокоскоростной фильтрацией. Аналогичным образом, в некоторых вариантах осуществления второй измеряемый параметр можно использовать в качестве исходного измерения для первого измеряемого параметра и (или) оба измеряемых параметра можно использовать в качестве исходного измерения друг для друга с целью получения информации о том же или ином положении и (или) состоянии движения. Кроме того, информацию о положении и (или) состоянии движения можно также корректировать с помощью другого доступного значения измерения, данных детектора или информации о состоянии, или другой соответствующей информации.
Таким образом, эта схема позволяет обеспечить недорогой, компактный и устойчивый детекторный узел для точного определения углового положения и (или) углового ускорения выбранного конструктивного элемента в одном или нескольких направлениях измерения. Это решение позволяет эффективно устранять погрешности результатов измерений, вызванные ускорениями, составляющими ускорений, обусловленными различными помехами, такими как удары, вибрации и рабочие перемещения, связанными с использованием только датчика ускорения. Вследствие этого детекторный узел работает надежно и в случае перемещения всей рабочей установки, в частности, например, когда рабочая установка движется с ускорением, замедлением или по криволинейной траектории, когда рабочая установка перемещается по неровной поверхности, что очень часто имеет место при работе передвижных рабочих установок, таких как лесозаготовительные машины, а также при раскачивании или вибрациях рабочей установки под действием исполнительного механизма или внешней нагрузки, например. Эти помехи, препятствующие измерению, обычно трудно и (или) невозможно обнаружить и (или) отфильтровать при традиционных способах измерения, поскольку частота этих помех может быть, например, идентична частоте фактических измеряемых рабочих перемещений, т.е. измеряемой информации. С другой стороны, фильтрация этих помех от результатов стандартных измерений также вызывает замедление. Другое преимущество такого детекторного узла заключается в том, что он позволяет свободно располагать детекторы в конструктивном элементе, при этом их не нужно размещать, например, в соединительных деталях, взаимосвязывающих конструктивные элементы, где детекторы часто подвергаются излишним механическим напряжениям и, например, воздействию внешних факторов, таких как толчки, обусловленные рельефом местности или положением установки, загрязнения и влияние погодных условий, а также другим соответствующим внешним воздействиям, сокращающим срок службы детекторов. Такое влияние погодных условий включает в себя, например, замерзание и оттаивание воды, термическое расширение льда, уплотнение снега и конденсацию воды. Кроме того, очистка, например, использование мойки высокого давления, применение эффективных очищающих химических веществ осложняются и ограничиваются типичной механической обнаруживающей системой, электропроводкой и соединителями на раме, поскольку, в частности, механические датчики и соединители электропроводки могут быть при этом повреждены.
При этом настоящее изобретение позволяет также избежать механически точного и трудоемкого прикрепления, присоединения, например, соединительной муфты для валов, и позиционирования обычных систем измерения, а также риска поломки, вызванного ослаблением и изменением положения шарниров вследствие износа механизма. Для использования датчиков и электропроводки обычных систем измерения необходимы точные системы защиты, требующие дорогостоящей установки и обслуживания, а, с другой стороны, такое прокладывание закрытой электропроводки невыгодно с точки зрения монтажа, затрат на монтаж и пригодности к эксплуатации. На ФИГ. 4 схематически показан способ определения взаимного положения или взаимного состояния движения по меньшей мере двух конструктивных элементов передвижной рабочей установки, при этом по меньшей мере два конструктивных элемента выполнены с возможностью вращения друг относительно друга по меньшей мере в одном направлении вращения. Способ, представленный на схеме, содержит шаг 41 определения по меньшей мере в одном направлении измерения по меньшей мере два различных измеряемых параметров, первого и второго измеряемых параметров, для каждого направления измерения с помощью детекторов, причем измеряемые параметры позволяют получать по меньшей мере информацию о положении или состоянии движения конкретного конструктивного элемента, относительно по меньшей мере одного заданного углового опорного сигнала. Подходящие угловые опорные сигналы раскрыты выше, например, в связи с представлением соответствующей схемы применительно к ФИГ. 1 и ФИГ. 2.
Кроме того, способ содержит шаг приема 42 средствами обработки данных первого и второго сигналов измерения, описывающих первый и второй измеряемые параметры и передаваемых детекторами, и шаг 43 определения каждого фрагмента информации о положении или состоянии движения конкретного конструктивного элемента, на основе первого и второго сигналов измерения. После этого способ содержит шаг 44 определения по меньшей мере взаимного положения или взаимного состояния движения конструктивных элементов на основе информации о положении или состоянии движения конкретного конструктивного элемента.
В одном варианте осуществления по меньшей мере уточненная информация о положении или состоянии движения конкретного конструктивного элемента, для двух конструктивных элементов может быть определена таким образом, чтобы информация о положении или состоянии движения для конструктивного элемента определялась по отдельности на основе первого измеряемого параметра и второго измеряемого параметра, и чтобы погрешность измерения информации о положении или состоянии движения, определяемой на основе первого измеряемого параметра, корректировалась с использованием соответствующей информации о положении или состоянии движения, определяемой на основе второго измеряемого параметра, в качестве эталонной информации.
В другом варианте осуществления по меньшей мере один кинематический параметр по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, определяют, используя определяемое взаимное положение или взаимное состояние движения конструктивных элементов. В еще одном варианте осуществления этот кинематический параметр представляет собой одну из следующих величин: абсолютную разность положения конструктивных элементов, по меньшей мере один угол шарнирного соединения по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, угловую скорость абсолютной разности положения конструктивных элементов или ее производную, угловую скорость по меньшей мере одного угла шарнирного соединения по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, или ее производную, или положение или состояние движения исполнительного механизма или конструктивного элемента, образованного по меньшей мере одной указанной соединительной деталью.
В одном варианте осуществления по меньшей мере один кинематический параметр по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы 19, определяют, используя определяемое взаимное положение или взаимное состояние движения конструктивных элементов. В таком случае соединительная деталь, взаимосвязывающая конструктивные элементы 19, может представлять собой шарнир 18, исполнительный механизм 6, такой как цилиндр, управляемый средой под давлением, например гидравлический цилиндр, или другую соединительную конструкцию. Этот кинематический параметр представляет собой одну из следующих величин: абсолютная разность положения конструктивных элементов, по меньшей мере один угол шарнирного соединения по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, угловая скорость абсолютной разности положения конструктивных элементов или ее производная, угловая скорость по меньшей мере одного угла шарнирного соединения по меньшей мере одной соединительной детали, взаимосвязывающей конструктивные элементы, или ее производная, или положение или состояние движения исполнительного механизма или конструктивного элемента, образованного по меньшей мере одной указанной соединительной деталью, относительно перпендикулярного направления, такого как компасный румб, например, относительно ускорения, вызванного вектором тяготения, и его направления, другого конструктивного элемента и (или) направления ускорения, вызванного вектором тяготения. Положение и состояние движения может при этом представлять собой, например, расположение/местоположение, скорость и (или) ускорение исполнительного механизма, управляемого рабочей средой под давлением, или положение другого исполнительного механизма. Таким образом, в этом случае можно надежно и точно получать различную кинематическую информацию о соединительных конструкциях на основе косвенной информации о положении и (или) состоянии движения, избегая соединения детекторов для прямого считывания данных с соединительными конструкциями; проблемы, создаваемые такими детекторами, были изложены выше. Кроме того, такой детекторный узел и (или) способ обеспечивают возможность точного и надежного определения положения и (или) состояния движения между конструктивными элементами без использования детекторов, размещаемых в изнашиваемых/заменяемых деталях, таких как датчики положения цилиндров, управляемых рабочей средой под давлением, в соединительных конструкциях; износостойкие устройства, альтернативные таким детекторам, как правило, являются дорогостоящими, при этом их часто приходится заменять в связи с заменой цилиндров, управляемых рабочей средой под давлением, даже если сам датчик не поврежден. Это решение также обеспечивает возможность практически свободного размещения детекторов, используемых для определения кинематических параметров таких соединительных деталей, в конструктивных элементах, взаимосвязанных с помощью соединительной конструкции, при этом детекторы можно монтировать в наиболее удобном месте с точки зрения, например, оптимизации срока службы детектора и предотвращения различных рисков и механических напряжений.
Раскрытое решение особенно предпочтительно при определении положения и (или) состояния движения крупных шарниров, например, при управлении так называемым выравнивающим и центральным/рамным шарниром. При использовании известных решений проблема связана с тем, что конструкция испытывает механические напряжения, вызываемые как самими конструкциями, так и внешними факторами, такими как ветви, пни, и т.п., сокращающие срок службы и повышающие риск отказа, а также со сложностью защиты самого детектора и его электропроводки в тех местах, где они подвергаются воздействию механических напряжений, воды, масла, снега и других соответствующих факторов.
Детекторный узел и способ, раскрытые выше, можно предпочтительно использовать, например, для управления положением кабины управления, для контроля и управления положением поворотной платформы стрелового узла, секциями стрелы или харвестерной головкой передвижной рабочей установки, такой как лесозаготовительная машина, относительно друг друга и (или) другого конструктивного элемента, такого как рамная часть. Детекторный узел, раскрытый выше, может особенно предпочтительно использоваться также для контроля и управления взаимным положением рамных частей и (или) секций стрелы, углом шарнирного соединения между рамными частями, в частности, передвижной рабочей установки, такой как лесозаготовительная машина.
В одном варианте осуществления раскрытый выше детекторный узел может быть соединен со стандартным блоком обработки данных, предпочтительно со встроенным блоком обработки данных, таким как встроенный блок управления. Особенно предпочтительно, чтобы раскрытый детекторный узел мог располагаться в блоке обработки данных и внутри того же корпуса. Такой способ установки раскрытого детекторного узла является легким и недорогим, при этом преимущества такого датчика, монтируемого на печатной плате внутри корпуса блока обработки данных, включают в себя, например, по сравнению с так называемым автономным датчиком, значительно более низкую цену, эффективную защиту от внешних воздействий, таких как факторы окружающей среды, вызванные погодными условиями (вода, снег, лед, пыль, температура), химических веществ, механических ударов и снашивания, а также от электромеханических воздействий, надежное электрическое соединение без помехо- и отказочувствительных соединителей и электропроводки, а также легкий, быстрый и недорогой монтаж.
В приведенных выше чертежах, вариантах осуществления и соответствующих описаниях термин «конструктивные элементы 19» относится к конструктивному элементу 19 передвижной рабочей установки 1, обладающему по меньшей мере возможностью поворота относительно другого конструктивного элемента 19 по меньшей мере в одном направлении вращения. Конструктивные элементы 19, взаимное положение или взаимное состояние движения которых необходимо определить, сочленяются друг с другом шарнирным способом или непосредственно, через различные монтажные конструкции, взаимосвязывающие конструктивные элементы, или с помощью других конструктивных элементов. Данные конструктивные элементы 19 могут, не ограничиваясь этим, содержать по меньшей мере один из следующих конструктивных элементов: по меньшей мере одну рамную часть 2, 3, 4, кабину 9 управления, по меньшей мере один источник 10 питания, стреловой узел 11 или одну или несколько секций 11а, 11b и 11с стрелы, грейфер 12, харвестерную головку 13, средства для перемещения лесозаготовительной машины, например, по меньшей мере одно колесо 14, опорный узел, ножной механизм или другой хорошо известный элемент для перемещения или по меньшей мере один другой хорошо известный конструктивный элемент лесозаготовительной машины 1. В одном варианте осуществления конструктивные элементы 19 содержат по меньшей мере две рамные части 2, 3, 4 передвижной рабочей установки, такой как лесозаготовительная машина, и (или) секции стрелы, при этом информация о взаимном состоянии движения и (или) положении этих конструктивных элементов, получаемая раскрытым выше способом, содержит по меньшей мере информацию об угле шарнирного соединения. В другом варианте осуществления конструктивные элементы 19 содержат по меньшей мере одну секцию стрелы передвижной рабочей установки или кабину управления передвижной рабочей установки, при этом можно получать информацию о положении и (или) состоянии движения секции стрелы или кабины управления относительно рамной части 2, 3, 4 другой секции стрелы или другого соответствующего конструктивного элемента передвижной рабочей установки.
В некоторых вариантах осуществления конструктивные элементы 19, информация о взаимном положении и (или) состоянии движения которых определяется, могут быть соединены непосредственно или с помощью соединительной детали. В некоторых других вариантах осуществления контролируемые конструктивные элементы 19 взаимосвязаны только косвенно, с помощью других конструктивных элементов, например. Естественно, что эти другие конструктивные элементы также могут быть выполнены соединенными друг с другом при помощи шарниров с одной или несколькими степенями свободы.
В одном варианте осуществления для информации о взаимном положении и (или) состоянии движения между конструктивными элементами 19 могут быть заданы предельные значения, например, по меньшей мере одно верхнее или нижнее предельное значение. В таком случае средства 32 обработки данных могут быть выполнены с возможностью формирования сигнала предупреждения об опасности потери устойчивости, когда определяемое взаимное положение или взаимное состояние движения конструктивных элементов превышает заданное предельное значение или немного меньше его. Каждое предельное значение может либо быть фиксированным, либо зависящим от условий эксплуатации, например. Средства обработки данных могут, например, быть выполненными с возможностью запуска сигнала предупреждения об опасности потери устойчивости для системы управления передвижной рабочей установкой, когда, например, угол шарнирного соединения между рамными частями 2, 3, 4 превышает верхнее предельное значение, определяемое в качестве безопасного или иным образом подходящего для текущих условий эксплуатации.
В различных вариантах осуществления каждый детектор может быть использован для определения одного или нескольких измеряемых параметров непосредственно или путем вычислений. Кроме того, каждый детектор может быть, скажем, одно-, двух- или трехосным, при этом каждый детектор можно использовать для определения одного или нескольких измеряемых параметров в одном или нескольких направлениях измерения. Направления измерения, в свою очередь, могут быть выбраны параллельными продольной, поперечной и (или) вертикальной осям передвижной рабочей установки или параллельными любому, по меньшей мере одному требуемому произвольному направлению в соответствии с функциональным назначением и целью применения.
В некоторых случаях признаки, раскрытые в настоящей заявке, могут быть использованы сами по себе, независимо от других признаков. С другой стороны, признаки, раскрытые в настоящей заявке, могут при необходимости комбинироваться для получения различных сочетаний.
Чертежи и относящееся к ним описание предназначены только для иллюстрации идеи изобретения. Изобретение может различаться в деталях в пределах объема притязаний формулы изобретения.
Устройство для обеспечения поворотного движения между тандемным или гусеничным мостом и корпусом транспортного средства, а также соответствующий способ
Способ обмера лесоматериала и соответствующее устройство
Источник мощности для лесозаготовительного аппарата
Способ и устройство в системе взвешивания, соответствующий продукт программного обеспечения и машина для погрузки-разгрузки материалов
Гусеничный блок и лесохозяйственная машина
Кран харвестера
Устройство для заготовки древесины
Устройство в шарнирном сочленении рабочей машины
Система и способ для массовой валки деревьев
Устройство крепления для стреловой системы
Устройство гусеничного полотна и лесохозяйственная машина
Способ проверочного взвешивания во взвешивающей системе, программный продукт, устройство проверочного взвешивания во взвешивающей системе и транспортно-загрузочное оборудование
Рама и устройство для транспортного средства или машины
Стреловая конструкция
Стабилизация лесозаготовительной машины
Нож для очистки деревьев от ветвей для лесотехнической машины
Устройство в лесотехнической машине и лесотехническая машина, оборудованная соответствующим устройством
Способ и устройство управления лесотехнической машиной
Кран
Способ и устройство в системе взвешивания, соответствующий продукт программного обеспечения и машина для погрузки-разгрузки материалов

