Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ УПРАВЛЕНИЯ ЕГО ПОЛЕТОМ
Вид РИД
Изобретение
Изобретение относится к авиационной технике, в частности к летательным аппаратам (ЛА) вертикального и укороченного взлета и посадки.
Известен патент RU 69839 «БЛА с двумя поворотными двигателями» (МПК В64С 39/02, опубл. 10.01.2008. Известный БЛА содержит свободнонесущее крыло и два поворотных двигателя (вентилятора), расположенных симметрично относительно оси БЛА и вне его. При этом каждый поворотный двигатель состоит из винта в кольце, который через вал, установленный в цилиндрическую втулку, жестко закрепленную к свободнонесущему крылу аппарата, соединяется с приводом двигателя, при этом каждый двигатель имеет независимый управляемый привод.
Основным недостатком прототипа является то, что из-за расположения поворотных двигателей на силовых элементах, длиной более размаха крыла, невозможно достигнуть высокого аэродинамического качества, без значительного роста массы конструкции ЛА. Известен летательный аппарат вертикального взлета и посадки (патент RU 141669 U, опубл. 10.06.2014), который содержит фюзеляж, киль, шасси, сочлененное крыло, два подъемно-маршевых вентилятора, каждый из которых состоит из винта в профилированном кольце с независимо управляемым приводом поворота, силовую установку с одним или более двигателями, узлом передачи вращающего момента от двигателя на приводные валы подъемно-маршевых вентиляторов и устройством управления тангажом. При этом подъемно-маршевые вентиляторы закреплены вблизи центра масс, симметрично относительно оси летательного аппарата на силовой балке, жестко соединенной с фюзеляжем.
В этом аппарате переход из вертикального режима взлета в горизонтальный полет осуществляется через «Висение» и «Переходный режим», а посадка - в обратном порядке, при этом для режима висения и самолетного режима полета используются одни и те же воздушные винты, что затрудняет и замедляет эти процессы, а также повышает траты на топливо.
Наиболее близким аналогом является система вертикального взлета и посадки Arcturus Introduces JUMP System
[http://www.unmannedsystemstechnology.com/2014/04/arcturus-introduces-jump-system-adds-vtol-capability-to-fixed-wing-uavs/, опубл.: 2015]. Эта система устанавливается на обычный самолет, делая из него аппарат вертикального взлета и посадки, который содержит маршевую силовую установку для горизонтального полета, две пары подъемных силовых установок для создания тяги в вертикальной оси в режиме висения, где одна пара подъемных винтов размещена в задней части крыла, а другая пара подъемных винтов - в передней части крыла.
Это специальная система, делающая из обычного самолета летательный аппарат гибридной схемы вертикального взлета и посадки, но при этом плоскости круга подъемных винтов имеют тот же угол, что и несущие площади (в данном случае крыло). В результате полученный гибридный самолет не стабилен и неэффективен в переходных режимах. Он не может разгоняться за счет подъемных винтов без выхода на отрицательные углы атаки. Разгон до нужный скорости за счет только одного маршевого мотора в данной схеме является затруднительным, так работающие подъемные винты будут создавать сопротивление по мере разгона и вносить дестабилизацию в канале тангажа за счет значительного смещения центра давления вперед относительно центра масс летательного аппарата.
Самолет с системой Arcturus Introduces JUMP System не стабилен и неэффективен в переходных режимах. Его система не может разгоняться за счет подъемных винтов без выхода на отрицательные углы атаки. Разгон до нужного скорости за счет только одного маршевого мотора в данной схеме является затруднительным, так как работающие подъемные винты будут создавать сопротивление по мере разгона и вносить дестабилизацию в канале тангажа за счет значительного смещения центра давления вперед относительно центра масс летательного аппарата.
Задачей изобретения является решение проблемы несовершенства компоновок имеющихся на рынке летательных аппаратов вертикального взлета и посадки, в результате чего они не могут совершать качественные переходы из режима висение в режим горизонтального полета по самолетному и обратно, что резко понижает энергоэффективность и надежность.
Технический результат: повышение эффективности и снижение времени перехода из режима висения в режим горизонтального полета и обратно, снижение расхода топлива на переход из состояния вертикального полета в горизонтальный.
Указанный технический результат достигается за счет того, что заявлен аппарат вертикального взлета и посадки, содержащий маршевую силовую установку для горизонтального полета в самолетном режиме, как минимум от трех отдельных подъемных силовых установок для создания тяги в вертикальной оси в режиме висения, отличающийся тем, что подъемные винты закреплены таким образом, что плоскость их вращения находится под углом от 2 до 35 градусов к несущим плоскостям крыла или крыльев.
Способ управления полетом заявленного летательного аппарата, характеризующийся тем, что в момент взлета летательного аппарата в режиме висения с положительным углом тангажа от 2-х до 35-ти градусов для набора достаточной скорости на подъемных двигателях с целью осуществления перехода в самолетный режим полета осуществляют наклон всего летательного аппарата вперед до угла тангажа, обеспечивающего горизонтальный полет в самолетном режиме, после достижения необходимой скорости (1,1-1,5 скорости сваливания) подъемные двигатели отключают. После перехода в самолетный режим полета используют дополнительную силовую установку.
Краткое описание чертежей
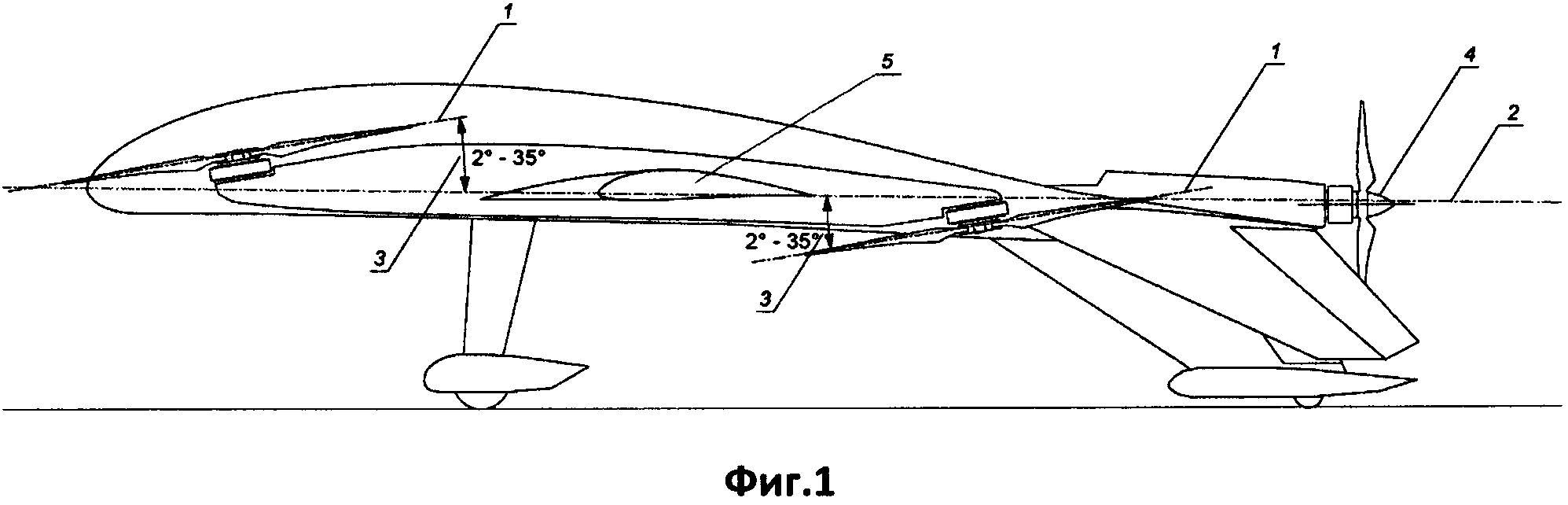
На Фиг. 1 показано устройство летательного аппарата, вид сбоку, где:
1 - Плоскость круга подъемных винтов;
2 – Плоскость, в которой лежит основная несущая поверхность (крыло, крылья, несущий фюзеляж);
3 - Диапазон жесткого закрепления плоскости круга подъемных винтов от плоскости основных несущих поверхностей (2-35 градусов);
4 - Маршевая силовая установка.
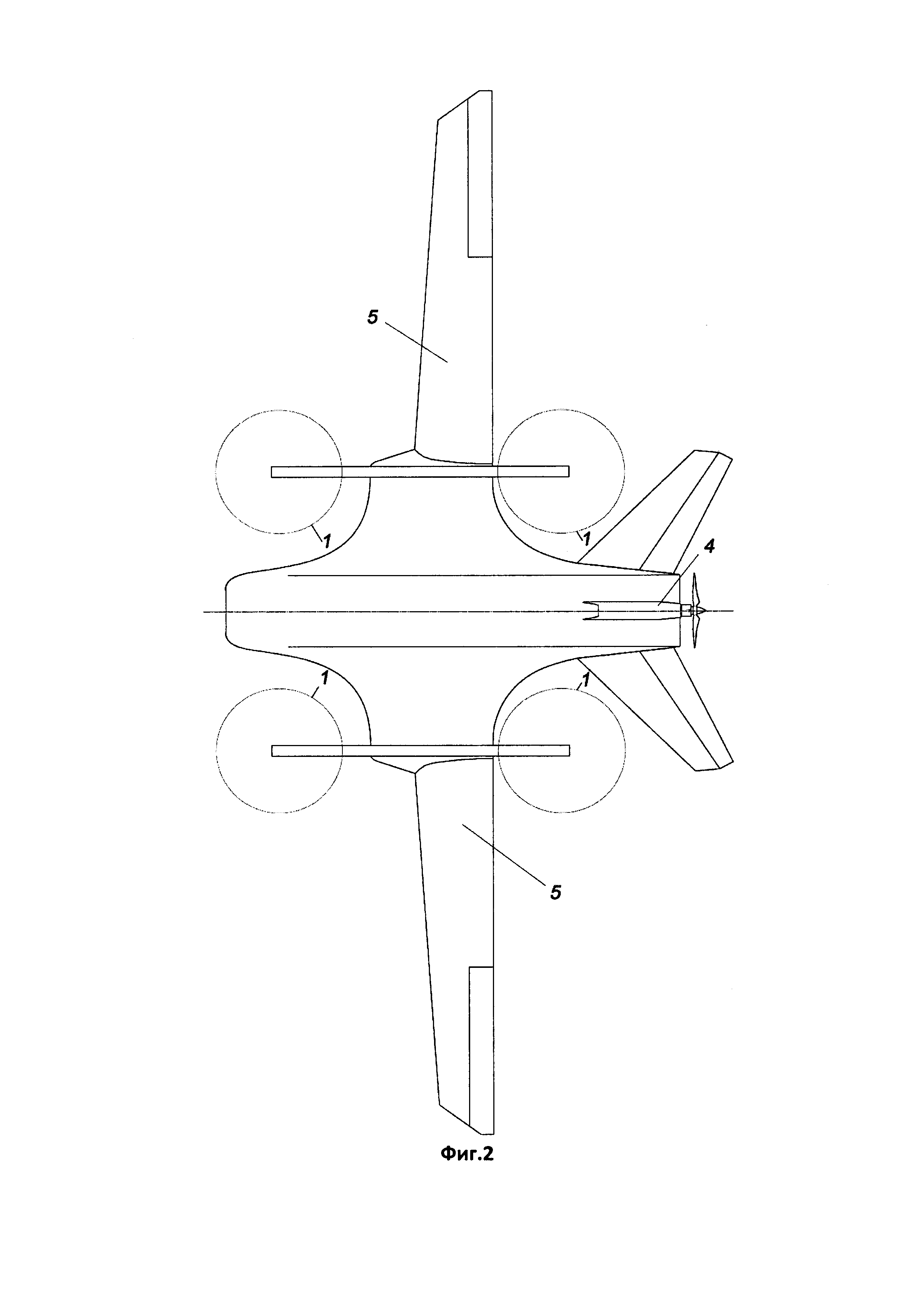
На Фиг. 2 показано устройство летательного аппарата, вид сверху.
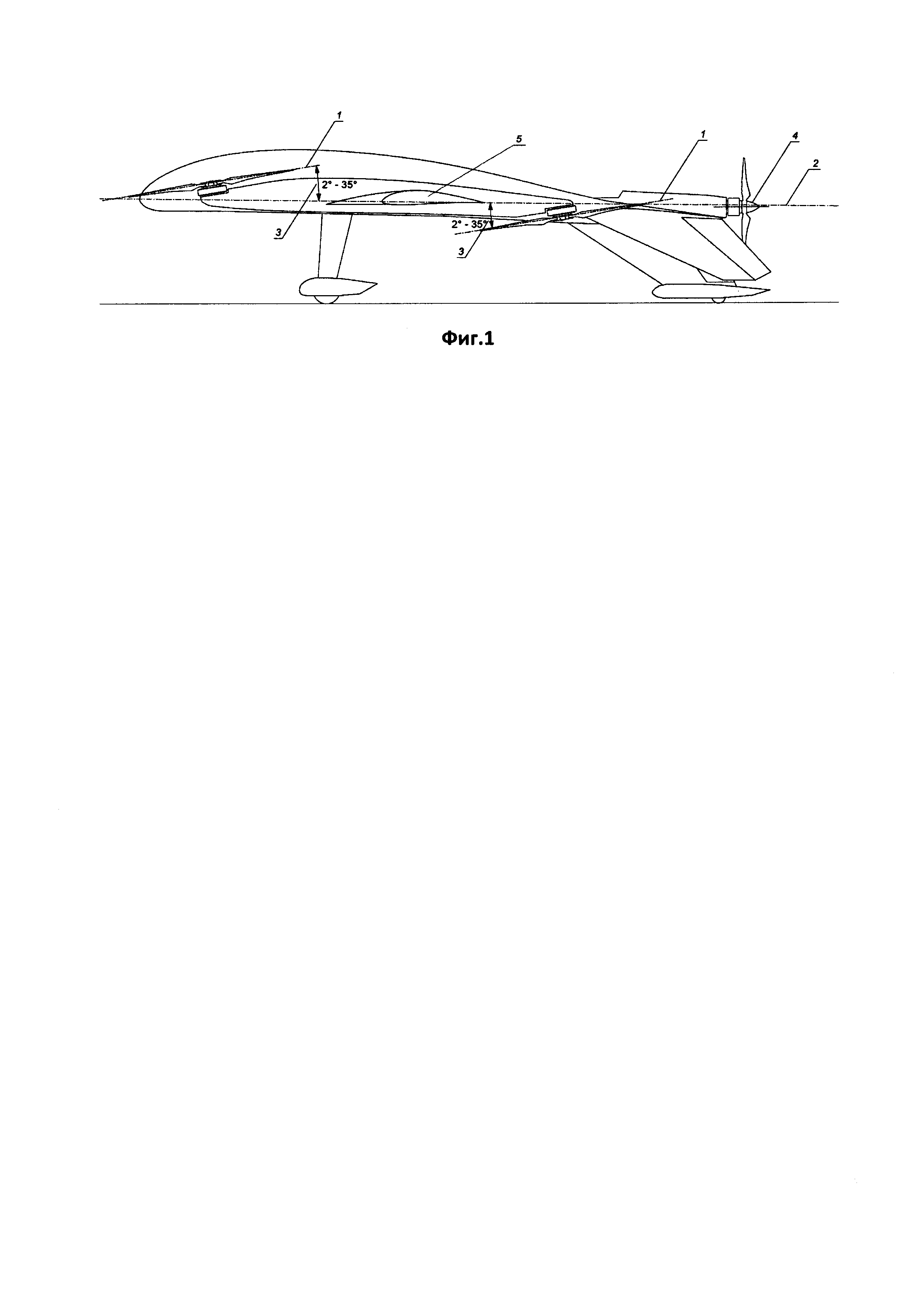
На Фиг. 3 показан пример выполнения аппарата с использованием минимального числа подъемных силовых установок - трех.
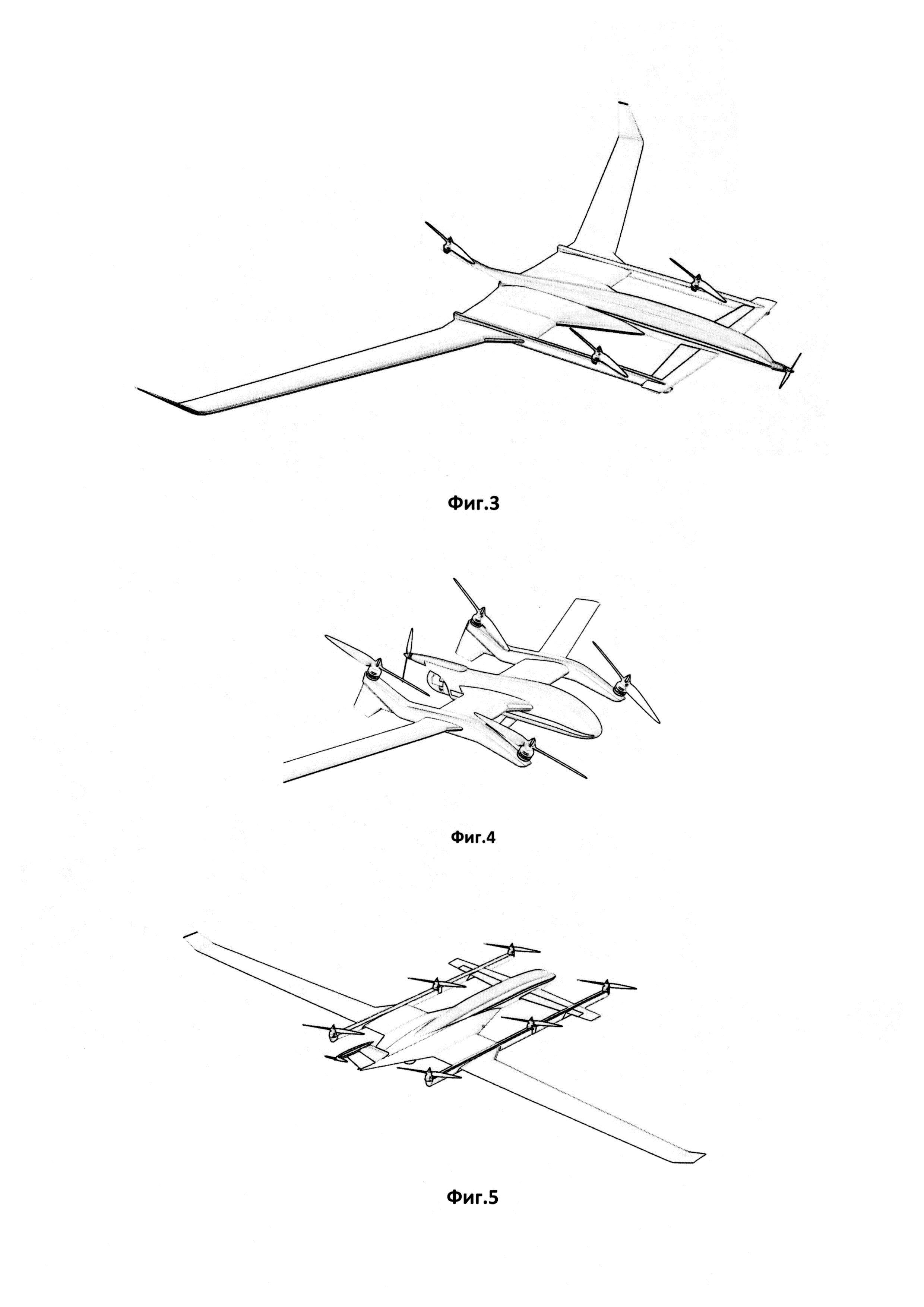
На Фиг. 4 показан пример выполнения аппарата с использованием большего, чем три, числа подъемных силовых установок на примере двух пар силовых установок.
На Фиг. 5 показан пример выполнения аппарата с использованием трех пар силовых установок.
Осуществление изобретения
Изобретение реализуется на базе аппарата вертикального взлета и посадки, в котором размещены маршевая силовая установка 4 (см. Фиг. 1, Фиг. 2) для горизонтального полета, две пары подъемных винтов 1 с отдельными силовыми установками для создания тяги в вертикальной оси в режиме висения.
В этом случае одна пара подъемных винтов 1 размещена на силовых балках за крылом 5, а другая пара подъемных винтов 1 - на силовых балках перед крылом 5 (см. пример на Фиг. 4).
Возможно выполнение аппарата таким образом, что одна пара подъемных винтов 1 размещена перед крылом 5 и один подъемный винт в задней части (см. Фиг. 3). Возможно и иное выполнение аппарата так, что он имеет три пары силовых установок - одну пару в передней части, одну пару в середине и одну пару в задней части (см. Фиг. 5). Плоскость вращения подъемных винтов 2 расположена под углом 3 к несущим плоскостям крыла 5 или крыльев, где возможный рабочий диапазон фиксации описанных углов составляет от 2 до 35 градусов.
Для большей эффективности вертикальной направленной тяги (см. Фиг. 1, Фиг. 2) задние винты 1 силовой установки для создания тяги в горизонтальной оси в переходном режиме могут быть установлены под основной несущей плоскостью 2 крыла 5 или крыльев, а передние винты 1 силовой установки для создания тяги в горизонтальной оси в переходном режиме установлены над основной несущей плоскостью 2 крыла 5 или крыльев.
Данная компоновка летательного аппарата вертикального взлета и посадки (см. Фиг. 1, Фиг. 2) включает в себя две пары подъемных силовых установок для создания тяги в вертикальной оси в режиме висения. Подъемные винты 1 (плоскость вращения винтов) при этом расположены под углами 3 к несущим плоскостям 2 (к крылу 5 или крыльям) таким образом, чтобы образовывалась положительная (направленная вперед) путевая составляющая в создаваемой ими вертикальной тяги. Рабочий диапазон описанных углов от 2-х до 35-ти градусов. В указанном диапазоне углов создается возможность набора необходимой горизонтальной скорости для самолета на подъемных винтах в горизонтальном положении без создания отрицательных углов атаки и с минимальными сопротивлениями. Также такое компоновочное решение дает возможность для создания аппаратов вертикального взлета и посадки гибридной схемы (с раздельными подъемными и маршевыми винтомоторными группами) с более высокими показателями энергоэффективности по сравнению с аналогами без наличия таких установочных углов подъемных винтов и другими схемами (конвертопланы).
Благодаря наличию угла (от 2 до 35 градусов) наклона плоскостей круга подъемных воздушных винтов по отношению к несущим плоскостям (к крылу или крыльям) образуется положительная (направленная вперед) путевая составляющая в создаваемой ими вертикальной тяги. Это создает возможность набора необходимой горизонтальной скорости на подъемных винтах в горизонтальном положении без создания отрицательных углов атаки и с минимальными сопротивлениями.
Предлагаемая компоновка позволяет набирать достаточную скорость на подъемных двигателях для осуществления полета в самолетном режиме за счет незначительного наклона всего летательного аппарата вперед. При этом летательный аппарат изначально находится в режиме висения с положительным углом тангажа, а после наклона для разгона занимает горизонтальное положение, в котором он находится в самолетном режиме. После достижения необходимой скорости (1,1-1,5 скорости сваливания) подъемные двигатели полностью или частично отключаются без потери управления и без просадок и каких-либо значительных неконтролируемых эволюций летательного аппарата. Благодаря этому снижается расход топлива на переход из состояния вертикального полета в горизонтальный и осуществляется плавный переход из режима висения в самолетный режим с возможностью переключения на дополнительную (маршевую) силовую установку.
Датчик уровня жидкости
Устройство для подачи капсул
Датчик уровня жидкости
Устройство для подачи капсул

