Результат интеллектуальной деятельности: Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано для определения местоположения источника радиоизлучения (ИРИ) с борта летательного аппарата (ЛА).
Одним из элементов методов оценки местоположения ИРИ и пространственной селекции, применяемых в пассивных угломерных системах, является определение координат ИРИ по двум азимутальным пеленгам, полученным в двух различных точках пространства [1. Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки эффективности). - М.: Радиотехника, 2005. - 304 с., с. 148], [2. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: Радиотехника, 2008. - 432 с., с. 11-64].
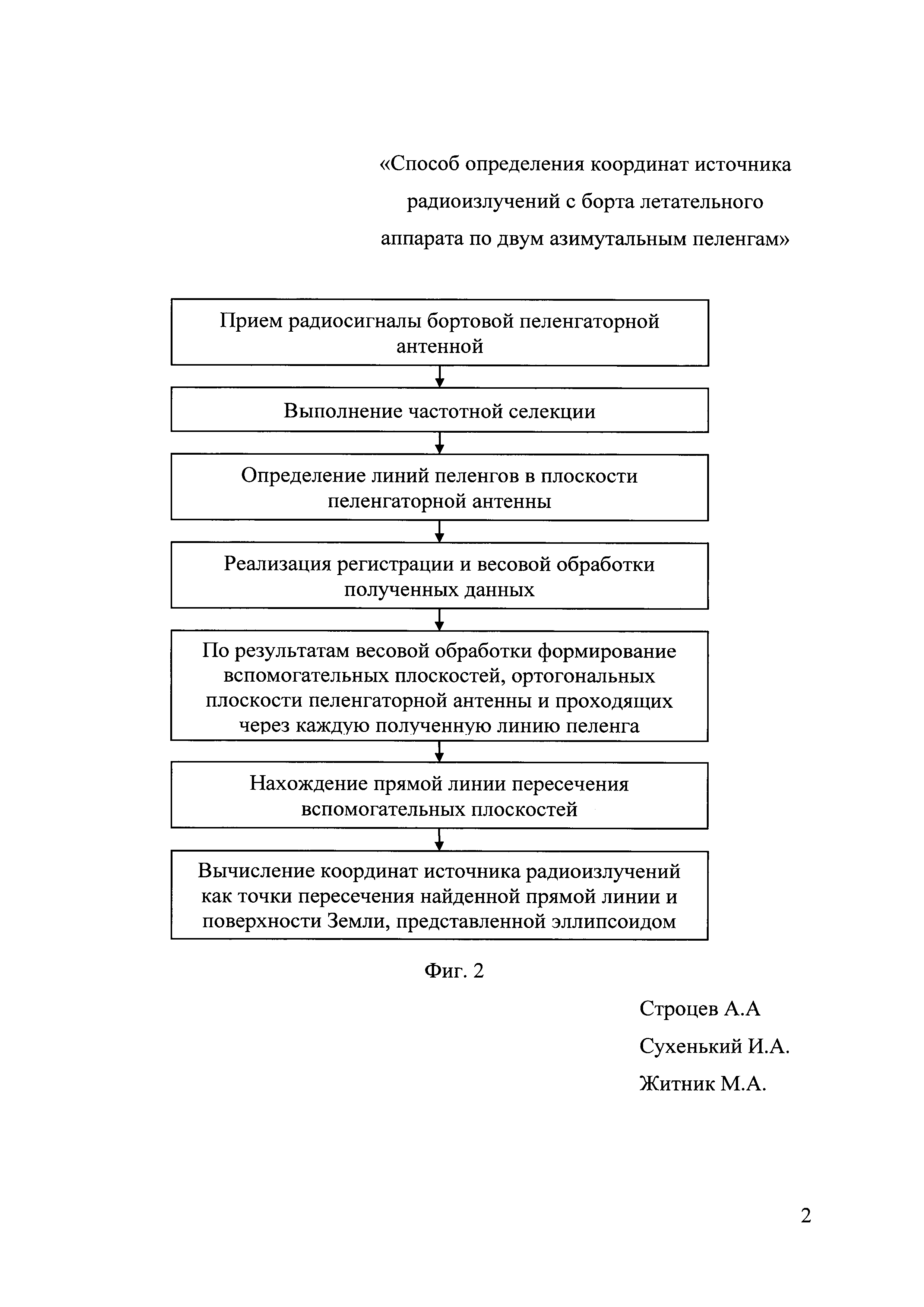
Известен способ определения координат источника радиоизлучений при амплитудно-фазовой пеленгации с борта летательного аппарата [3. Способ определения координат источника радиоизлучений при амплитудно-фазовой пеленгации с борта летательного аппарата. Патент RU №2432590, МПК G01S 1/08, опубл. 27.10.2011, бюл. №30.], принятый за прототип, который включает: прием радиосигналов бортовой пеленгаторной антенной, выполнение частотной селекции, определение линий пеленгов в плоскости пеленгаторной антенны, регистрацию и весовую обработку полученных данных, по результатам весовой обработки формирование вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга, определение линии положения источника радиоизлучений как линии пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисление координат источника радиоизлучений как точки пересечения линий положения источника радиоизлучений.
Недостатком способа-прототипа являются:
- низкая точность определения координат ИРИ УКВ диапазона на дальностях до ЛА, близких к радиогоризонту, при описании поверхности Земли плоскостью [3, с. 7];
- высокая вычислительная сложность выполнения операций определения линии положения источника радиоизлучений как линии пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисления координат источника радиоизлучений как точки пересечения линий положения источника радиоизлучений при описании поверхности Земли эллипсоидом.
Высокая вычислительная сложность выполнения операций вычисления координат источника радиоизлучений как точки пересечения линий положения источника радиоизлучений обусловлена нелинейностью этой вычислительной задачи в случае, когда поверхность Земли описана эллипсоидом.
Целью изобретения является повышение точности определения координат ИРИ УКВ диапазона на дальностях до ЛА, близких к радиогоризонту, при эквивалентных требуемых вычислительных затратах.
Для достижения указанной цели предлагается способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам, включающий прием радиосигналов бортовой пеленгаторной антенной, частотную селекцию, определение линий пеленгов в плоскости пеленгаторной антенны, регистрацию и весовую обработку полученных данных, по результатам весовой обработки, формирование вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга.
Согласно изобретению находят прямую линию пересечения вспомогательных плоскостей и вычисляют координаты источника радиоизлучений как точку пересечения найденной прямой линии и поверхности Земли, описанной эллипсоидом.
Достигаемый технический результат заключается в повышении точности определения координат ИРИ УКВ диапазона на дальностях до ЛА, близких к радиогоризонту.
Указанный технический результат достигают за счет введения новых операций по формированию линии положения ИРИ и вычисления координат точки пересечения линии положения с поверхностью Земли, описанной эллипсоидом.
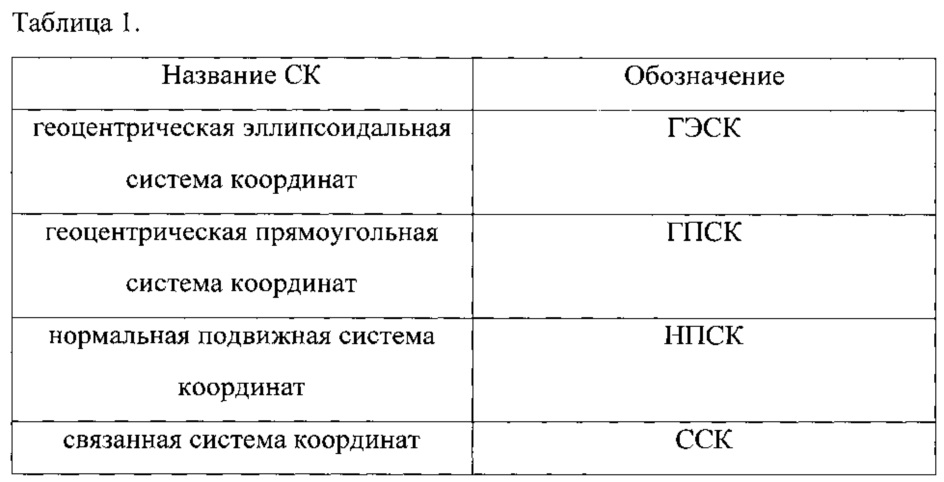
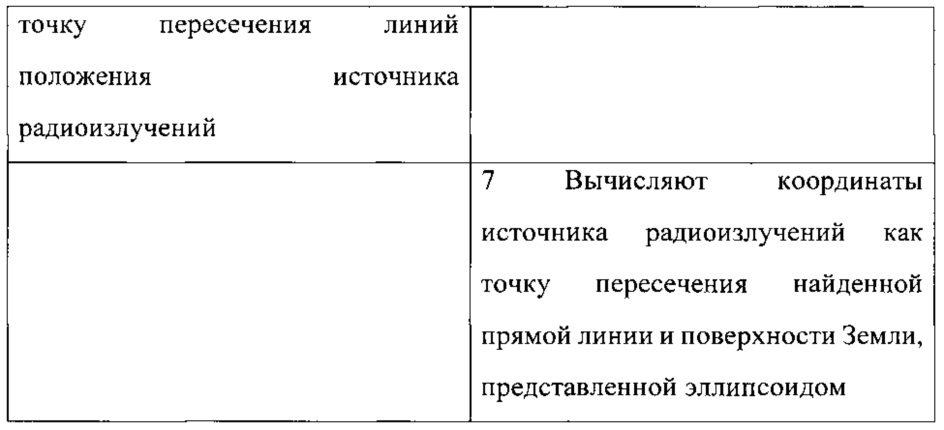
На фиг. 1 - системы координат, используемые при описании способа;
На фиг. 2 - блок-схема выполнения операций, реализующих предлагаемый способ;
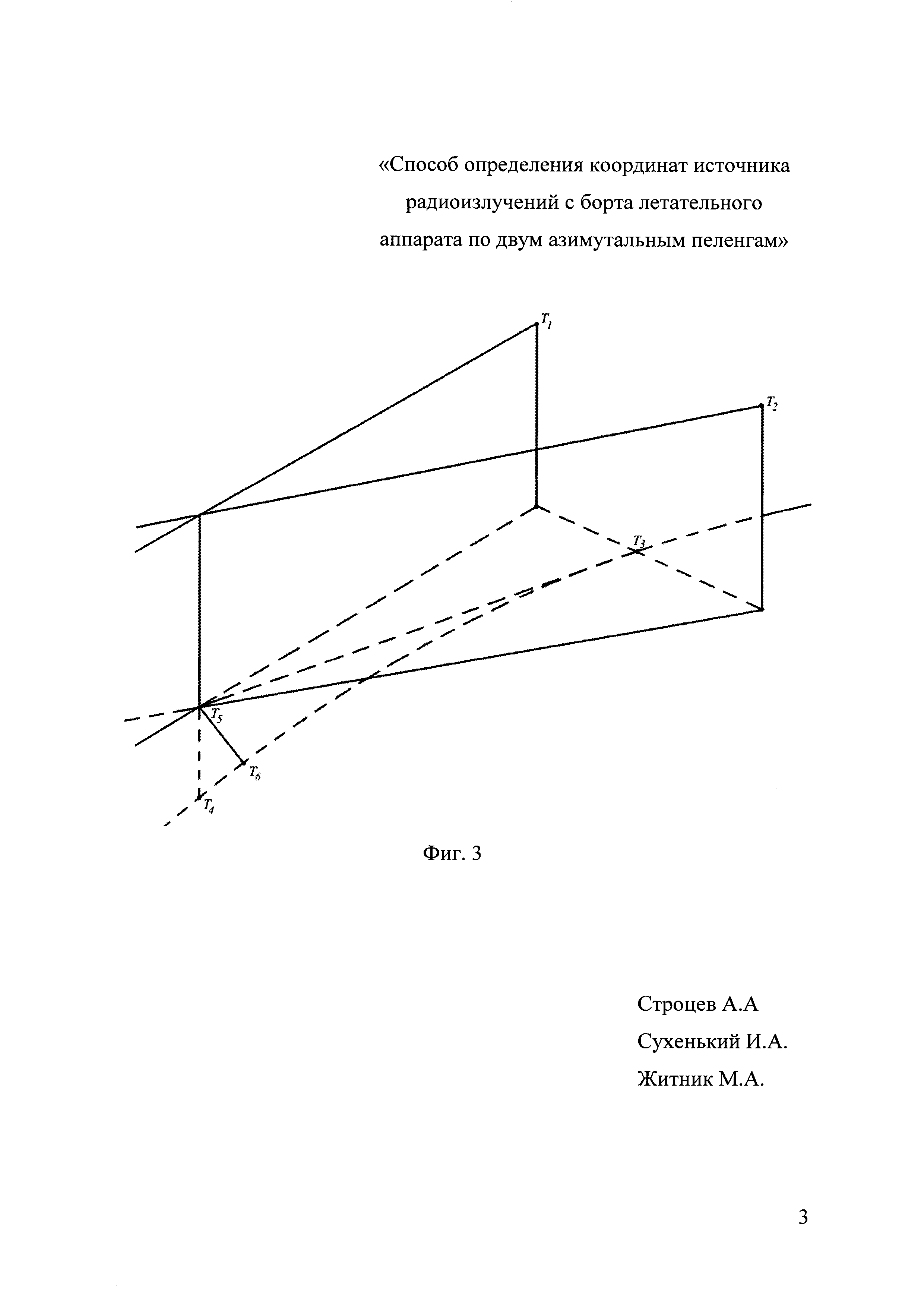
На фиг. 3 - условия, при которых выполнялась оценка методической погрешности определения координат ИРИ, связанная с представлением поверхности Земли плоскостью;
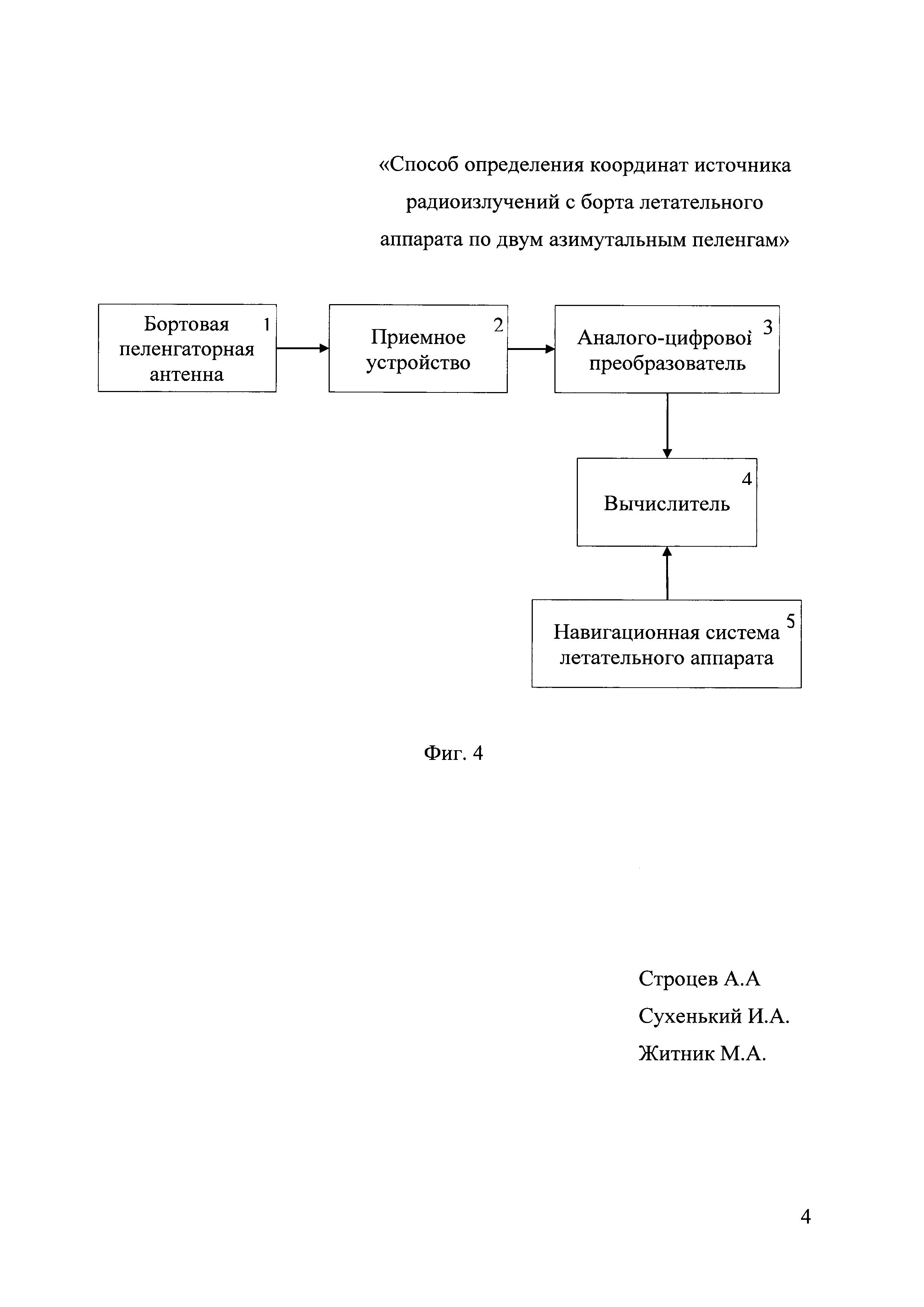
На фиг. 4 - структурная схема устройства, реализующего предлагаемый способ.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
При описании способа используются системы координат (СК) и их обозначения, перечисленные в таблице 1 и представленные на фиг. 1. Взаимное расположение СК описано в [3, с. 5] [4. Машимов М.М. Теоретическая геодезия. – М.: Недра, 1991. - 268 с., с. 6].
Способ определения координат источника радиоизлучений с борта ЛА по двум азимутальным пеленгам реализуется следующим образом.
1. Осуществляют прием радиосигналов бортовой пеленгаторной антенной.
2. Выполняют частотную селекцию.
3. Определяют линии пеленгов ϕ в плоскости пеленгаторной антенны.
4. Проводят весовую обработку полученных данных.
5. По результатам весовой обработки формируют вспомогательные плоскости, ортогональные плоскости пеленгаторной антенны и проходящие через каждую полученную линию пеленга.
6. Находят прямую линию пересечения двух вспомогательных плоскостей.
7. Вычисляют координаты ИРИ как точку пересечения найденной прямой линии и поверхности Земли, описанной эллипсоидом.
Для реализации пункта 5 координаты ЛА в моменты получения пеленгов переводят в геоцентрическую прямоугольную систему координат по формулам [4, с. 14]
xГПСК=(N+H)cosBcosL;
yГПСК=(N+H)cosBsinL;
zГПСК=((1-e2)N+H)sinB,
где e - эксцентриситет эллипсоида Земли;
N - радиус кривизны нормального сечения эллипсоида Земли в плоскости первого вертикала;
В, L, Н - широта, долгота и высота ЛА в момент получения пеленга.
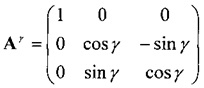
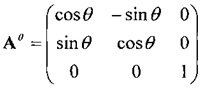
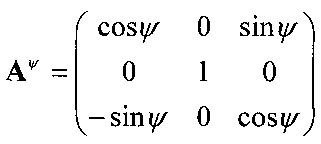
Затем составляют матрицу перехода из ССК в НПСК [3, с. 6]
AССК→НПСК=Aγ⋅Aθ⋅Aψ,
где Аγ - матрица поворота ССК на угол крена γ ЛА вокруг оси Ох;
Aθ - матрица поворота ССК на угол тангажа θ ЛА вокруг оси Oz;
Aψ - матрица поворота ССК на угол рыскания ψ ЛА вокруг оси Оу:
 ;
;
 ;
;
 .
.
Составляют матрицу перехода из НПСК в ГПСК [4, с. 18]:
 .
.
Три точки для построения вспомогательной плоскости выбираются в ССК следующим образом:
 ,
,  ,
,  ,
,
где ϕ - азимутальный пеленг ИРИ.
Перевод известных точек для построения плоскости из ССК в ГПСК осуществляют по формуле
 ;
;
 ;
;
 .
.
Положение вспомогательной плоскости в пространстве задается выражением [3, с. 7]
Ax+By+Cz+D=0,
Коэффициенты А, В, С, D можно найти, используя следующие формулы [3, с. 7]:
 ;
;
 ;
;
 ;
;
Для реализации пункта 6 решают систему уравнений, определяющую прямую линию как пересечение двух плоскостей в пространстве:

Прямую линию в пространстве также можно представить параметрически [5, Бугров Я.С. Высшая математика: Учеб. Для вузов: В 3 т., Т. 1: Элементы линейной алгебры и аналитической геометрии. - М.: Дрофа, 2004. - 288 с., с. 90]:

где v=(νх νy νz) - направляющий вектор прямой;
q=(qx,qy,qz) - произвольная точка, принадлежащая прямой,
λ - параметр.
В случае, когда прямая является пересечением двух плоскостей,
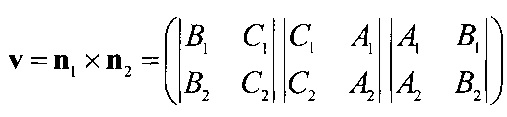 ,
,
где n1 и n2 - нормали к пересекающимся плоскостям,
× - операция векторного произведения.
Тогда, положив q3=0 в силу произвольности точки q, из (1) получают
 ;
;
 .
.
Для реализации пункта 7 решают систему уравнений, определяющую точку пересечения найденной прямой линии и поверхности Земли, описываемой эллипсоидом, которая имеет следующий вид:
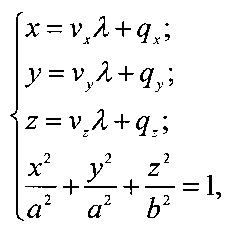
где а и b - большая и малая полуось эллипсоида, описывающего поверхность Земли.
Данная система уравнений сводится к одному уравнению относительно параметра λ:
аλ2+bλ+с=0,
где
 ;
;
b=2b2(νxqx+νyqy)+2a2νzqz;
 .
.
Полученное уравнение является квадратным уравнением относительно параметра λ. Его корни находятся по следующей формуле:
 ,
,
где D=b2-4ас.
Возвращаясь к выражениям (2), получаем координаты двух точек  и
и  . Одна из этих точек является ложной в силу неоднозначности операции извлечения корня. Исходя из геометрического смысла, истинным положением ИРИ является та точка, расстояние от которой до ЛА является минимальным. Вторая точка лежит на противоположной от ЛА стороне эллипсоида и не находится в пределах радиогоризонта пеленгаторной антенны. Расстояние между ЛА и предположительными местоположениями ИРИ вычисляется по формуле:
. Одна из этих точек является ложной в силу неоднозначности операции извлечения корня. Исходя из геометрического смысла, истинным положением ИРИ является та точка, расстояние от которой до ЛА является минимальным. Вторая точка лежит на противоположной от ЛА стороне эллипсоида и не находится в пределах радиогоризонта пеленгаторной антенны. Расстояние между ЛА и предположительными местоположениями ИРИ вычисляется по формуле:
 , i={1;2}.
, i={1;2}.
Координаты истинного местоположения ИРИ переводят в ГЭСК и считают полученные координаты (ВИРИ, LИРИ, НИРИ) точными координатами местоположения ИРИ.
Описанные операции по формированию вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга, нахождения прямой линии пересечения вспомогательных плоскостей, вычисления координат источника радиоизлучений как точки пересечения найденной прямой линии и поверхности Земли, представленной эллипсоидом, представлены в виде блок-схемы на фиг. 2.
Таким образом, предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 2.

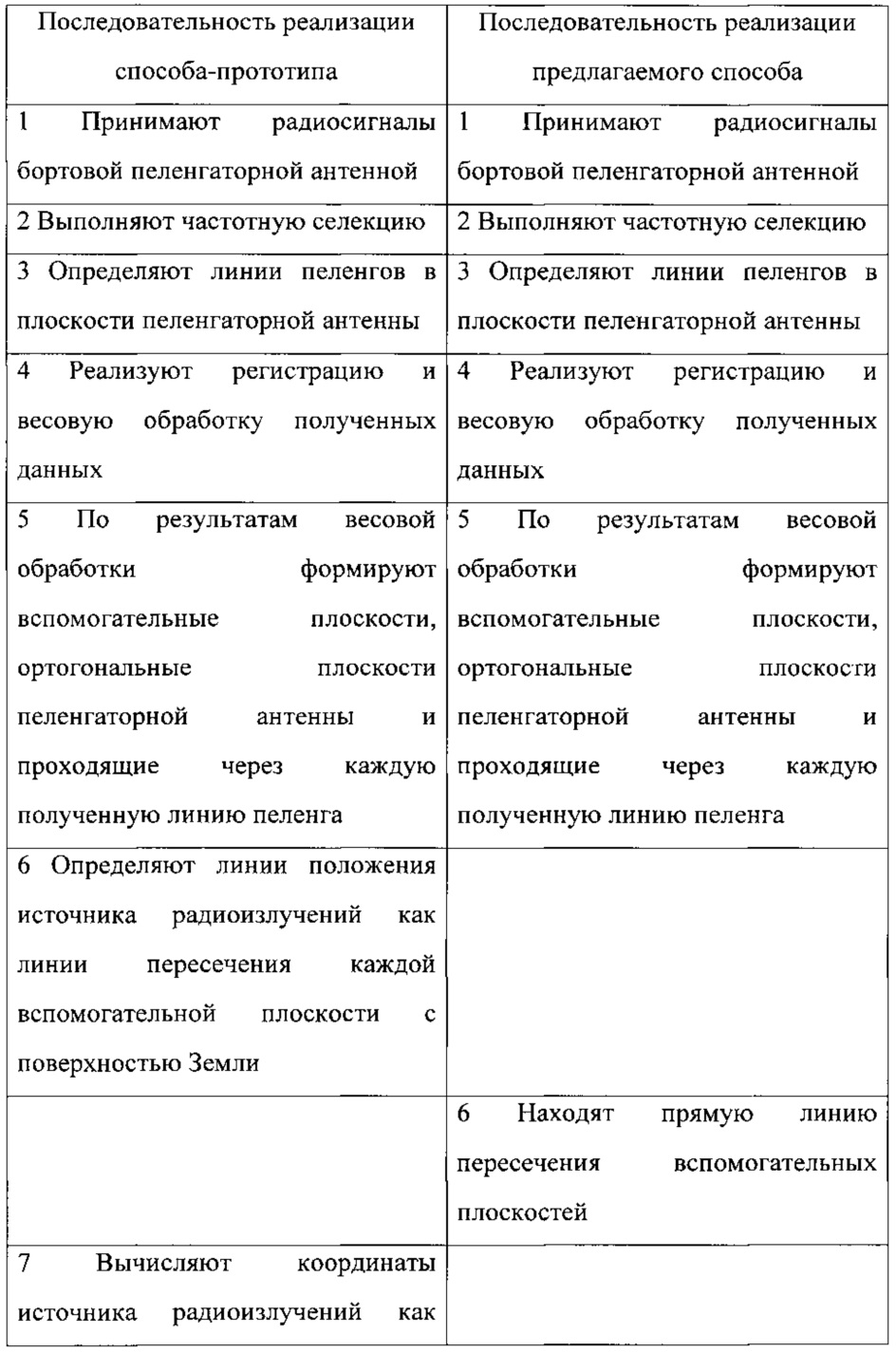
Из представленной таблицы сравнения последовательностей реализаций способа-прототипа и предлагаемого способа видно, что в предлагаемом способе относительно способа-прототипа вместо определения линии положения источника радиоизлучений как линии пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисления координат источника радиоизлучений как точку пересечения линий положения источника радиоизлучений, находят прямую линию пересечения вспомогательных плоскостей и вычисляют координаты источника радиоизлучений как точки пересечения найденной прямой линии и поверхности Земли, что приводит к положительному эффекту - уменьшению вычислительных затрат и повышению точности при описании поверхности Земли эллипсоидом.
Оценка методической погрешности определения координат ИРИ, связанной с представлением поверхности Земли плоскостью, проводилась для следующих условий (фиг. 3):
- два пространственно-разнесенных положения ЛА определяются геодезическими эллиптическими координатами (WGS-84): 40,0000° с.ш. 50,0000° в.д. 10000,00 м (точка Т1) и 39,9764° с.ш. 57,3408° в.д. 10000,00 м (точка Т2);
- плоскость, определяющая модель Земли, является плоскостью местного горизонта, проходящей через точку на поверхности земного эллипсоида с координатами (WGS-84): 39,9941° с.ш. 56,1709° в.д. 0,00 м (точка Т3);
- положение ИРИ задано координатами (WGS-84): 42,6992° с.ш. 55,0000° в.д. 0,00 м (точка Т4);
- отклонение плоскостей пеленгов ИРИ из точек Т1 и Т2, проходящих через соответствующие нормали пеленгаторной антенны, от плоскостей пеленгов ИРИ из этих же точек, проходящих через нормали в них к плоскостям местного горизонта, составляет величины порядка 7°;
- расстояния между точками представлены в таблице 3.

Для этих условий координаты (WGS-84) точки пересечения плоскостей пеленга и плоскости, определяющей модель Земли: 42,7224° с.ш. 54,9902° в.д. 7987,10 м (точка Т5), а ее проекции на земной эллипсоид: 42,7224° с.ш. 54,9902° в.д. 0,00 м (точка Т6).
Тогда погрешности определения координат ИРИ, связанные с представлением Земли в виде плоскости, определяемые как расстояния между точками Т4-Т5 и Т4-Т6 соответственно, составляют 8432 м и 2700 м. В случае применения в качестве модели земной поверхности земного эллипсоида эта составляющая методической погрешности равна нулю.
Следовательно, предложенный способ позволяет, помимо сокращения вычислительных затрат, повысить точность оценки местоположения ИРИ.
Структурная схема устройства, реализующего предлагаемый способ, изображена на фиг. 4. Сигнал ИРИ поступает на бортовую пеленгаторную антенну 1, затем на приемное устройство 2. В приемном устройстве 2 выполняется преобразование сигнала в промежуточную частоту. Затем преобразованный сигнал поступает на аналого-цифровой преобразователь 3, выполняющий оцифровку сигнала. Оцифрованный сигнал поступает на вычислитель 4, где производится частотная селекция, определение линий пеленгов в плоскости пеленгаторной антенны, регистрация и весовая обработка полученных данных. Затем вычислитель 4 реализует операции, представленные на фиг. 2. Данные о положении ЛА в пространстве поступают от навигационной системы ЛА 5. Результатом работы устройства являются координаты ИРИ.
Таким образом, предлагаемый способ так же, как и способ-прототип, позволяет выполнить определение местоположения ИРИ. Кроме того, приведенная сравнительная оценка эффективности предлагаемого способа относительно способа-прототипа показывает повышение точности определения местоположения и сокращение вычислительных затрат. Экспериментальная проверка предлагаемого способа подтвердила правильность и достаточность технических решений.
Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам, для реализации которого принимают радиосигналы бортовой пеленгаторной антенной, выполняют частотную селекцию, определяют линии пеленгов в плоскости пеленгаторной антенны, реализуют регистрацию и весовую обработку полученных данных, по результатам весовой обработки формируют вспомогательные плоскости, ортогональные плоскости пеленгаторной антенны и проходящие через каждую полученную линию пеленга, отличающийся тем, что находят прямую линию пересечения вспомогательных плоскостей и вычисляют координаты источника радиоизлучений как точку пересечения найденной прямой линии и поверхности Земли, представленной эллипсоидом.
Способ обучения искусственной нейронной сети
Способ построения радиолокационной станции
Способ построения антенной системы с изменяемым углом плоскости линейной поляризации
Голографический способ измерения доплеровского сдвига частоты
Способ построения антенной решетки
Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей
Способ обнаружения малых беспилотных летательных аппаратов
Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой
Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой
Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой
Способ обучения искусственной нейронной сети

