Способ информационно-технического сопряжения составных частей мобильного робототехнического комплекса
Вид РИД
Изобретение
Изобретение относится к способам информационно-технического взаимодействия терминалов управления, вычислительных средств и периферийных устройств мобильных робототехнических комплексов военного и специального назначения.
Известен способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ (см. №2510585, Н04L 29/00, 27.03.2014 г.), принятый за прототип. Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ включает в себя преобразование, передачу, прием измерительных и управляющих сигналов по линиям связи согласно протоколу информационного взаимодействия. Протокол информационного взаимодействия обеспечивает работу аппаратуры топопривязки и навигации в различных режимах. Передача информации между бортовой ЭВМ и системой топопривязки и навигации осуществляется двоичным цифровым последовательным кодом в асинхронном режиме. Информационное взаимодействие осуществляется в соответствии со следующими перечнями параметров, для каждого из которых определен соответствующий тип данных: прием ААТН данных от бортовой ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток, геометрический параметр, средняя квадратическая погрешность определения координат, высота барометрическая абсолютная, механическая линейная скорость объекта, доплеровская линейная скорость объекта, московское время суток на момент измерения скорости, слово признаков достоверности, командное слово, контрольная сумма, выдача данных из ААТН в бортовую ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток на момент измерения выдаваемых параметров, пройденное расстояние, слово состояния, режимное слово, контрольная сумма.
Недостатками прототипа являются:
- высокая конфигуративная сложность системы информационного обмена мобильного робототехнического комплекса;
- недостаточная четкость в организации логического взаимодействия информационных потоков;
- недостаточный уровень сохранения целостности данных.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационно-технического взаимодействия составных частей мобильного робототехнического комплекса.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа информационно-технического сопряжения составных частей мобильного робототехнического комплекса, обеспечивающего прием и передачу информации между терминалами управления, информационно-управляющим вычислителем и периферийными устройствами.
Указанный технический результат достигается тем, что в предлагаемом способе информационно-технического сопряжения составных частей мобильного робототехнического комплекса, обеспечивающем согласно протоколу сопряжения прием и передачу информации через вычислительные средства по каналам связи на терминалы управления - автоматизированные рабочие места и периферийные устройства комплекса, пакетную передачу данных, новым является то, что терминалы управления - автоматизированные рабочие места оператора-водителя и оператора-разведчика - обмениваются через систему связи и передачи данных информацией с составными частями мобильного робототехнического комплекса: информационно-управляющим вычислителем, блоком обработки видеоизображения, блоком управления двигателем, системой предупреждения столкновений, информационно-техническое сопряжение информационно-управляющего вычислителя с составными частями мобильного робототехнического комплекса по интерфейсу Ethernet определено в частных протоколах сопряжения с этими составными частями, логическая организация взаимодействия предусматривает присвоение задачам и информационным потокам уникальных имен-идентификаторов, все составные части в сети Ethernet мобильного робототехнического комплекса имеют сетевой адрес, при передаче информации данные передаются от верхнего к нижнему уровню протокола, выполненного в соответствии с данным способом, а при получении информации составными частями данные извлекаются в обратном порядке, на верхнем уровне задач каждый передаваемый задачей кадр сопровождается следующей информацией: размер кадра, порядковый номер кадра, идентификатор информационного потока, идентификатор задачи-отправителя, уровень ячеек расположен между верхним уровнем задач и уровнем датаграмм, кадр данных, поступающий от уровня задач, преобразуется в одну ячейку, а затем передается на уровень датаграмм, принимаемые от терминалов управления и составных частей мобильного робототехнического комплекса датаграммы содержат ячейки, которые собираются в кадр данных и передаются на уровень задач, датаграмма включает в себя одну простую ячейку, информационные потоки в системе передачи команд управления распределены согласно следующей конфигурации: с автоматизированного рабочего места оператора-водителя передаются команды управления движением, команды управления системой предупреждения столкновений, команды управления системой топопривязки и навигации, команды управления информационно-управляющим вычислителем, с автоматизированного рабочего места оператора-разведчика передаются команды управления целевой нагрузкой, команды управления блоком управления видеоизображением, на автоматизированное рабочее место оператора-водителя поступают данные телеметрии информационно-управляющего вычислителя, системы управления движением, системы топопривязки и навигации и ее ответы на команды управления, данные о препятствиях, на автоматизированное рабочее место оператора-разведчика поступают данные телеметрии целевой нагрузки, видеопоток, телеметрия и ответы на вопросы с блока обработки видеоизображения.
Организация обмена терминалов управления - автоматизированных рабочих мест оператора-водителя и оператора-разведчика - через систему связи и передачи данных информацией с составными частями мобильного робототехнического комплекса позволяет:
- организовать передачу с автоматизированного рабочего места оператора-водителя команд управления движением системой предупреждения столкновений, системой топопривязки и навигации и информационно-управляющим вычислителем;
- организовать передачу с автоматизированного рабочего места оператора-разведчика команд управления целевой нагрузкой блоком обработки видеоизображения;
- организовать передачу с периферийных устройств телеметрических данных, данных о препятствиях и видеоинформации.
Реализация информационно-технического сопряжения информационно-управляющего вычислителя с составными частями мобильного робототехнического комплекса по интерфейсу Ethernet в частных протоколах сопряжения с этими составными частями позволяет:
- обеспечить информационно-техническое сопряжение информационно-управляющего вычислителя с блоком управления двигателями;
- обеспечить информационно-техническое сопряжение информационно-управляющего вычислителя с автоматизированными рабочими местами оператора-водителя и оператора-разведчика;
- обеспечить информационно-техническое сопряжение информационно-управляющего вычислителя с системой предупреждения столкновений.
Присвоение при логической организации взаимодействия задачам и информационным потокам уникальных имен-идентификаторов позволяет:
- проанализировать информационно-управляющему вычислителю информацию всех передаваемых через него информационных потоков;
- отсечь кадры неизвестных информационных потоков.
Присвоение всем составным частям в сети Ethernet мобильного робототехнического комплекса сетевого адреса позволяет сформировать структуру сетевого адреса, состоящего из ip-адреса и порта протокола UDP для приема информации.
Передача данных от верхнего к нижнему уровню протокола, а при получении информации составными частями данные извлекаются в обратном порядке, позволяет упорядочить информационный обмен между составными частями мобильного робототехнического комплекса.
Сопровождение на верхнем уровне задач каждого передаваемого задачей кадра следующей информацией: размер кадра, порядковый номер кадра, идентификатор информационного потока, идентификатор задачи-отправителя позволяет:
- идентифицировать задачи и информационные потоки;
- регистрировать принимающей стороне потери кадров, подсчитывать количество принятых и потерянных кадров.
Размещение уровня ячеек между верхним уровнем задач и уровнем датаграмм позволяет:
- сформировать структуру простой ячейки;
- преобразовать кадр данных, поступающий от уровня задач, в простую ячейку;
- передать на уровень задач кадры, состоящие из ячеек дата-грамм.
Распределение информационных потоков в системе передачи команд управления согласно определенной конфигурации позволяет:
- с автоматизированного рабочего места оператора-водителя передавать команды управления движением, команды управления системой предупреждения столкновений, команды управления системой топопривязки и навигации, команды управления информационно-управляющим вычислителем;
- с автоматизированного рабочего места оператора-разведчика передавать команды управления целевой нагрузкой, команды управления блоком управления видеоизображением;
- на автоматизированное рабочее место оператора-водителя передавать данные телеметрии информационно-управляющего вычислителя, системы управления движением, системы топопривязки и навигации и ее ответы на команды управления, данные о препятствиях;
- на автоматизированное рабочее место оператора-разведчика передавать данные телеметрии целевой нагрузки, видеопоток с видеокамер, данные телеметрии и ответы на вопросы с блока обработки видеоизображения.
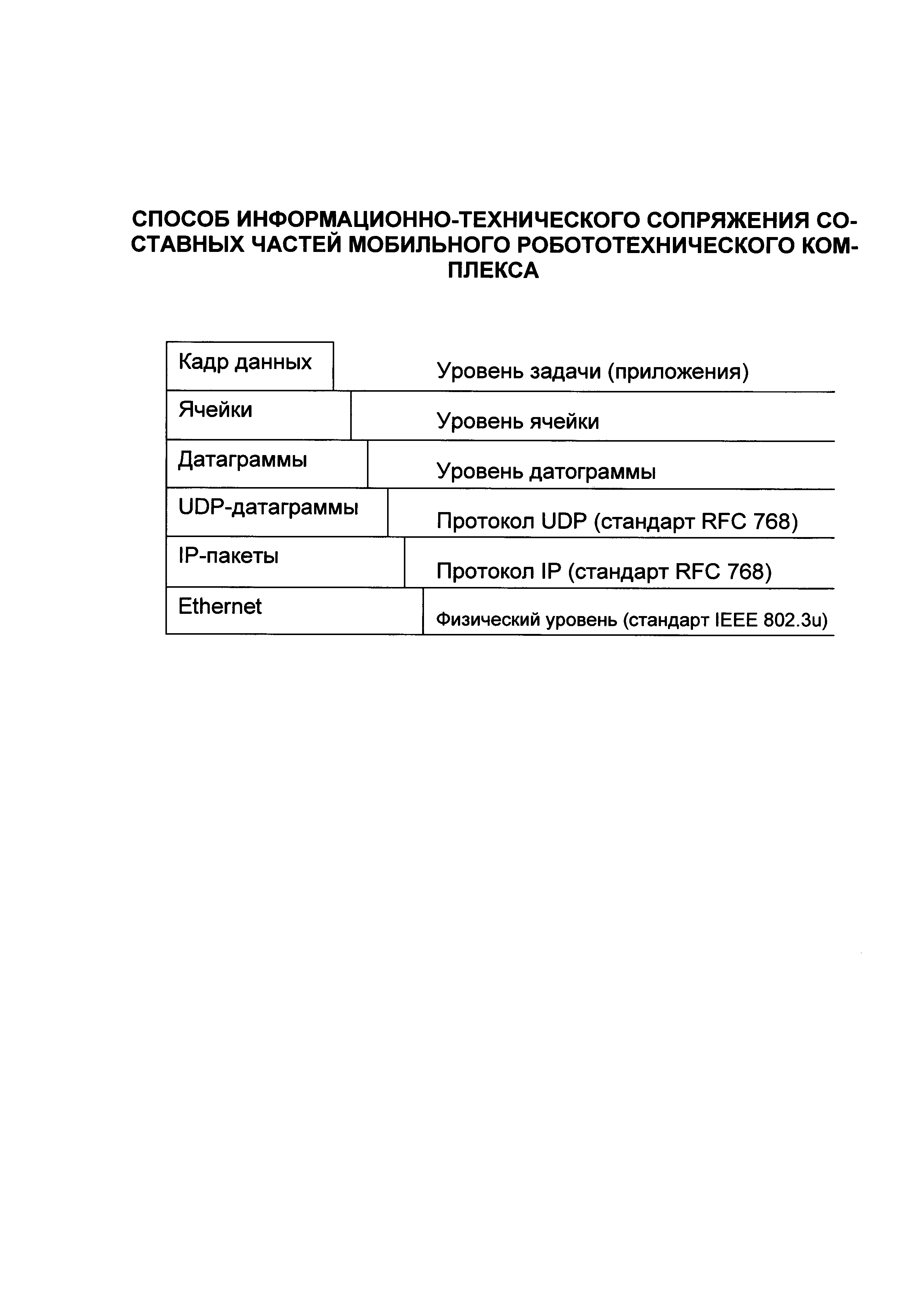
Сущность изобретения поясняется чертежом, где показана схема уровней протокола Ethernet, выполненного в соответствии с данным способом.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Способ информационно-технического сопряжения составных частей мобильного робототехнического комплекса реализуется на основе соответствующего протокола следующим образом. Способ определяет порядок приема и передачи информации между терминалами управления (ТУ), информационно-управляющим вычислителем (ИУВ) и другими составными частями мобильного робототехнического комплекса (МРК). К ТУ относятся следующие изделия: автоматизированное рабочее место (АРМ) оператора-водителя и автоматизированное рабочее место (АРМ) оператора-разведчика. ТУ могут обмениваться через систему связи и передачи данных (ССПД) информацией со следующими составными частями МРК: ИУВ, блок обработки видеоизображения (БОВ), блок управления двигателями (БУД), система предупреждения столкновений (СПС). Кроме того, в данной сети Ethernet работают две цифровые ip-видеокамеры, информационно-техническое сопряжение с ИУВ которых (кроме ip-адреса и UDP-порта) не регламентируется. Информационный обмен между составными частями через ИУВ по интерфейсам Ethernet (посредством маршрутизатора Ethernet). Информационно-техническое сопряжение с отдельными устройствами по интерфейсу Ethernet осуществляется по частным протоколам:
- протокол информационно-технического сопряжения ИУВ с БУД по интерфейсу Ethernet;
- протокол информационно-технического сопряжения ИУВ с АРМ оператора-водителя по радиоканалу;
- протокол информационно-технического сопряжения ИУВ с АРМ оператора-разведчика по радиоканалу;
- протокол информационно-технического сопряжения ИУВ с СПС по интерфейсу Ethernet.
Физическое взаимодействие организовано следующим образом:
- стандарт интерфейса: Fast Ethernet IEEE 802.3u;
- физический интерфейс: витая пара UTP Cat.5 (5е);
- скорость обмена: 100 Мбит/с.
Логическая организация взаимодействия
Под задачей понимается программная процедура, выполняемая на каком-либо устройстве МРК или на терминале, которая осуществляет передачу или прием информации через ИУВ и ССПД.
Под кадром данных понимается порция данных, подготовленная задачей к передаче. Кадры данных представляют собой сообщения произвольного размера, которыми обмениваются задачи.
Под информационным потоком понимается последовательность кадров с данными, для которых определены: задача-источник, множество задач-приемников и параметры передачи потока. К параметрам информационного потока относятся: маршрут передачи кадров, приоритет обработки и др.
Кадры данных передаются задачей в информационный поток и читаются задачами из информационного потока. Задачи и информационные потоки имеют уникальные имена (идентификаторы). Идентификатор задачи (потока) представляет собой слово из не более чем шести символов латинского алфавита. Размер идентификатора всегда равен шести байтам. Символы в идентификаторы кодируются в соответствии с таблицей ASCII. Если идентификатор содержит менее шести символов, то последние не содержащие байты (символы) идентификаторы имеют нулевое значение. Каждое устройство в сети Ethernet имеет сетевой адрес: ip-адрес и порт протокола UDP для приема информации. Данный способ сопряжения обеспечивает пакетную передачу данных между задачами, при этом обеспечивается негарантированная передача данных. В случае потерь данных ССПД не осуществляет их восстановление путем повторной передачи. Способ обеспечивает также контроль порядка передачи кадров данных и целостности данных.
Уровни протокола
При передаче информации задачей данные передаются от верхнего к нижнему уровню протокола. Кадр данных при обработке на каждом уровне может разбиваться на составные части или собираться из составных частей. При получении информации данные извлекаются в обратном порядке.
Конфигурация системы передачи команд управления (СПКУ)
СПКУ - система, роль которой выполняет ИУВ и которая заключается в распределении сетевых пакетов по блокам.
Сведения об информационных потоках, обслуживаемых ИУВ, приведены в таблице 1.
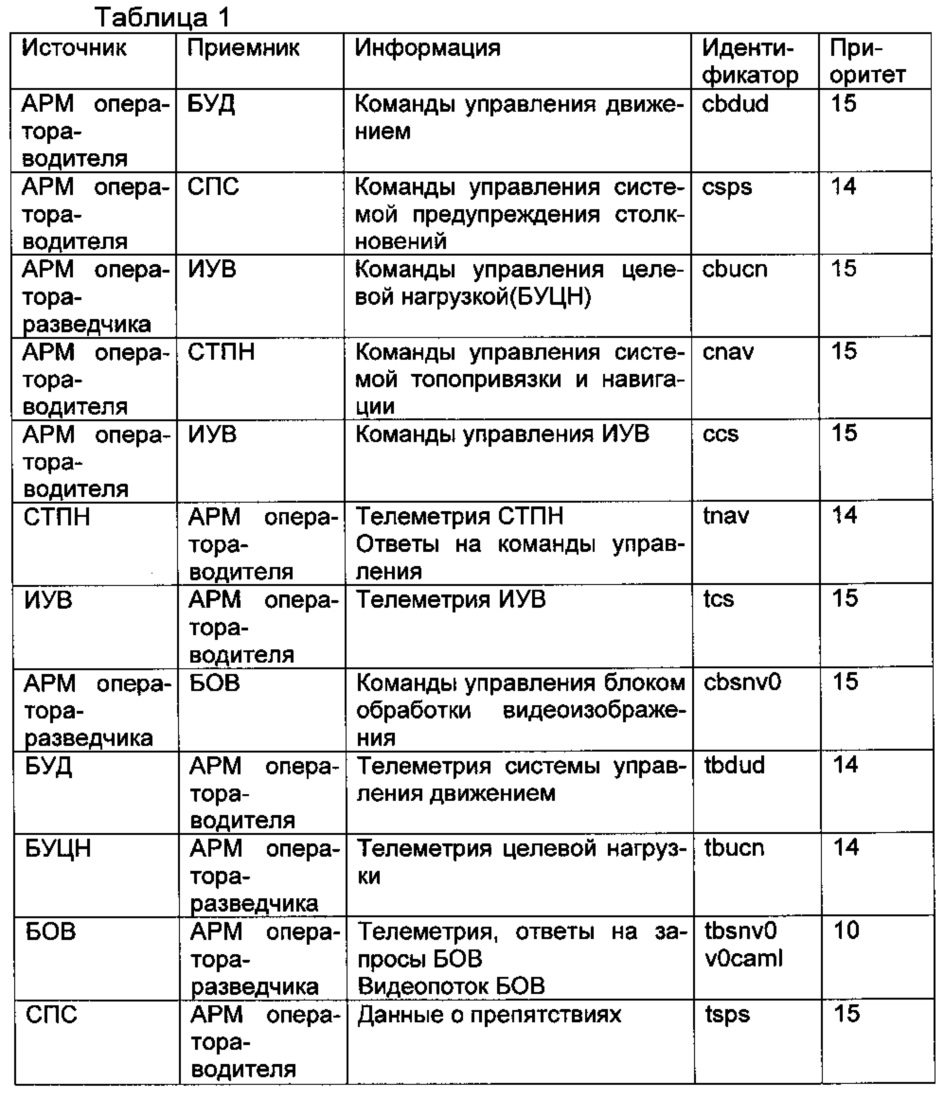
ИУВ может анализировать информацию всех передаваемых через нее информационных потоков. Кадры неизвестных информационных потоков игнорируются ИУВ.
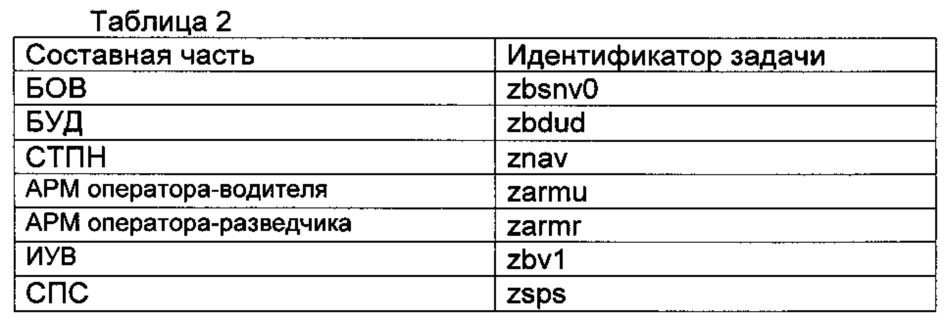
Идентификаторы задач приведены в таблице 2.
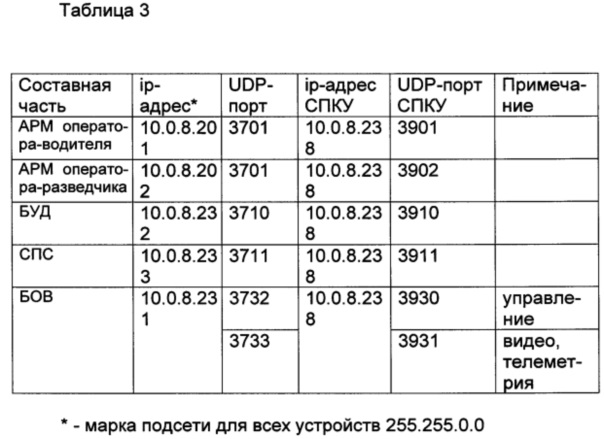
Сетевые адреса терминалов управления и составных частей МРК, используемые для сопряжения с ИУВ, приведены в таблице 3.
Уровень задач
Каждый передаваемый задачей кадр данных сопровождается следующей метаинформацией:
- размер кадра;
- порядковый номер кадра;
- идентификатор информационного потока;
- идентификатор задачи-отправителя.
Максимальный размер кадра на уровне задач не превышает 483 байта. Порядковый номер кадра - число от 0 до 2116-1. Задача должна нумеровать каждый кадр, передаваемый в информационный поток. Порядковый номер первого передаваемого кадра не имеет значения. Каждый последующий кадр имеет порядковый номер на единицу больше, чем предыдущий. При достижении порядкового номера (2116-1) следующий кадр передается с порядковым номером 0. Порядковый номер кадра может использоваться принимающей стороной для регистрации потерь кадров, подсчета количества принятых и потерянных кадров и т.п.
Уровень ячеек
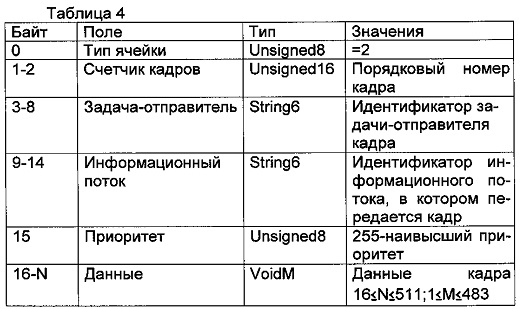
Уровень ячеек находится между уровнем задач и уровнем датаграмм. Кадр данных, поступающий от уровня задач, преобразуется в одну ячейку, а затем передается на уровень датаграмм. Принимаемые от терминалов управления и составных частей датаграммы содержат ячейки, которые собираются в кадр данных и передаются на уровень задач. Ячейки передаются или принимаются от уровня датаграмм по одной или группой. Существует только один тип ячейки - простая ячейка. Размер кадра, передаваемого простой ячейкой, не должен превышать 483 байта. Размер простой ячейки не превышает Chunk Size = 512 байт.
Структура простой ячейки приведена в таблице 4.
Уровень датаграмм
Датаграмма включает в себя одну простую ячейку и сопровождается метаинформацией. Структура простой датаграммы приведена в таблице 5.

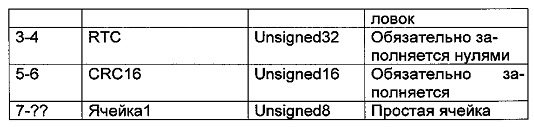
Размер передаваемой датаграммы не должен превышать 1512 байт. Количество ячеек в датаграмме - 1.
Типы данных
Битовой последовательностью b длиной n назовем упорядоченный набор битов длиной от 0 до n, где 0≤n≤64. Каждый бит последовательности обозначается индексом:
b=b0b1b2…bn-1
Для битовых последовательностей определены операции конкатенации (+) и инверсии (~). Битовая последовательность длиной n преобразуется и передается на физическом уровне в виде последовательности октетов длиной l=[n/8]. Биты старшего октета, номера которого превышают n, не содержат битов передаваемой последовательности, их значение не определено.

Тип VOIDn
Здесь n-целое число, 0≤n≤64. Данные типа VOIDn представляются битовой последовательностью длиной n.
Тип UNSIGNEDn
Тип предназначен для хранения положительных целых в диапазоне 0, 1, 2, …, 2n-1. Тип представляется битовой последовательностью длиной n. Битовая последовательность b=b0b1b2…bn-1 соответствует значению:
UNSIGNEDn(b)=bn-1(21, bn-1)+…+b121+b0
Тип UNTEGERn
Тип предназначен для хранения целых значений в диапазоне - 2n-1, … 2n-1-1. Битовая последовательность b=b0b1b2…bn-1 соответствует значению:
UNTEGERn(b)=bn-2(21bn-2)+…+b121+b0, если bn-1=0
UNTEGERn(b)=-UNTEGERn(~b)+1, если bn-1=1
Массив
Массив определяется следующим образом:
ARRAY [<Длина>] OF <Базовый тип> <Имя типа>
Данные составных типов представляются битовой последовательностью, получаемой путем конкатенации битовых последовательностей составляющих компонент. Общая длина структуры или массива не должна превышать 64 бит.
Тип STRINGn
Тип STRINGn предназначен для хранения строковых данных и определяется следующим образом:
ARRAY [n] OF UNSIGNED8 STRINGn
Каждый элемент массива представляет собой код символа в соответствии с таблицей ASCII и кодировкой KOI8-R.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа информационно-технического сопряжения составных частей мобильного робототехнического комплекса, обеспечивающего прием и передачу информации между терминалами управления, информационно-управляющим вычислителем и периферийными устройствами.
Способ информационно-технического сопряжения составных частей мобильного робототехнического комплекса, обеспечивающий согласно протоколу сопряжения прием и передачу информации через вычислительные средства по каналам связи на терминалы управления - автоматизированные рабочие места и периферийные устройства комплекса, пакетную передачу данных, отличающийся тем, что терминалы управления - автоматизированные рабочие места оператора-водителя и оператора-разведчика - обмениваются через систему связи и передачи данных информацией с составными частями мобильного робототехнического комплекса: информационно-управляющим вычислителем, блоком обработки видеоизображения, блоком управления двигателем, системой предупреждения столкновений, информационно-техническое сопряжение информационно-управляющего вычислителя с составными частями мобильного робототехнического комплекса по интерфейсу Ethernet определено в частных протоколах сопряжения с этими составными частями, логическая организация взаимодействия предусматривает присвоение задачам и информационным потокам уникальных имен-идентификаторов, все составные части в сети Ethernet мобильного робототехнического комплекса имеют сетевой адрес, при передаче информации данные передаются от верхнего к нижнему уровню протокола, выполненного в соответствии с данным способом, а при получении информации составными частями данные извлекаются в обратном порядке, на верхнем уровне задач каждый передаваемый задачей кадр сопровождается следующей информацией: размер кадра, порядковый номер кадра, идентификатор информационного потока, идентификатор задачи-отправителя, уровень ячеек расположен между верхним уровнем задач и уровнем датаграмм, кадр данных, поступающий от уровня задач, преобразуется в одну ячейку, а затем передается на уровень датаграмм, принимаемые от терминалов управления и составных частей мобильного робототехнического комплекса датаграммы содержат ячейки, которые собираются в кадр данных и передаются на уровень задач, датаграмма включает в себя одну простую ячейку, информационные потоки в системе передачи команд управления распределены согласно следующей конфигурации: с автоматизированного рабочего места оператора-водителя передаются команды управления движением, команды управления системой предупреждения столкновений, команды управления системой топопривязки и навигации, команды управления информационно-управляющим вычислителем, с автоматизированного рабочего места оператора-разведчика передаются команды управления целевой нагрузкой, команды управления блоком управления видеоизображением, на автоматизированное рабочее место оператора-водителя поступают данные телеметрии информационно-управляющего вычислителя, системы управления движением, системы топопривязки и навигации и ее ответы на команды управления, данные о препятствиях, на автоматизированное рабочее место оператора-разведчика поступают данные телеметрии целевой нагрузки, видеопоток, телеметрия и ответы на вопросы с блока обработки видеоизображения.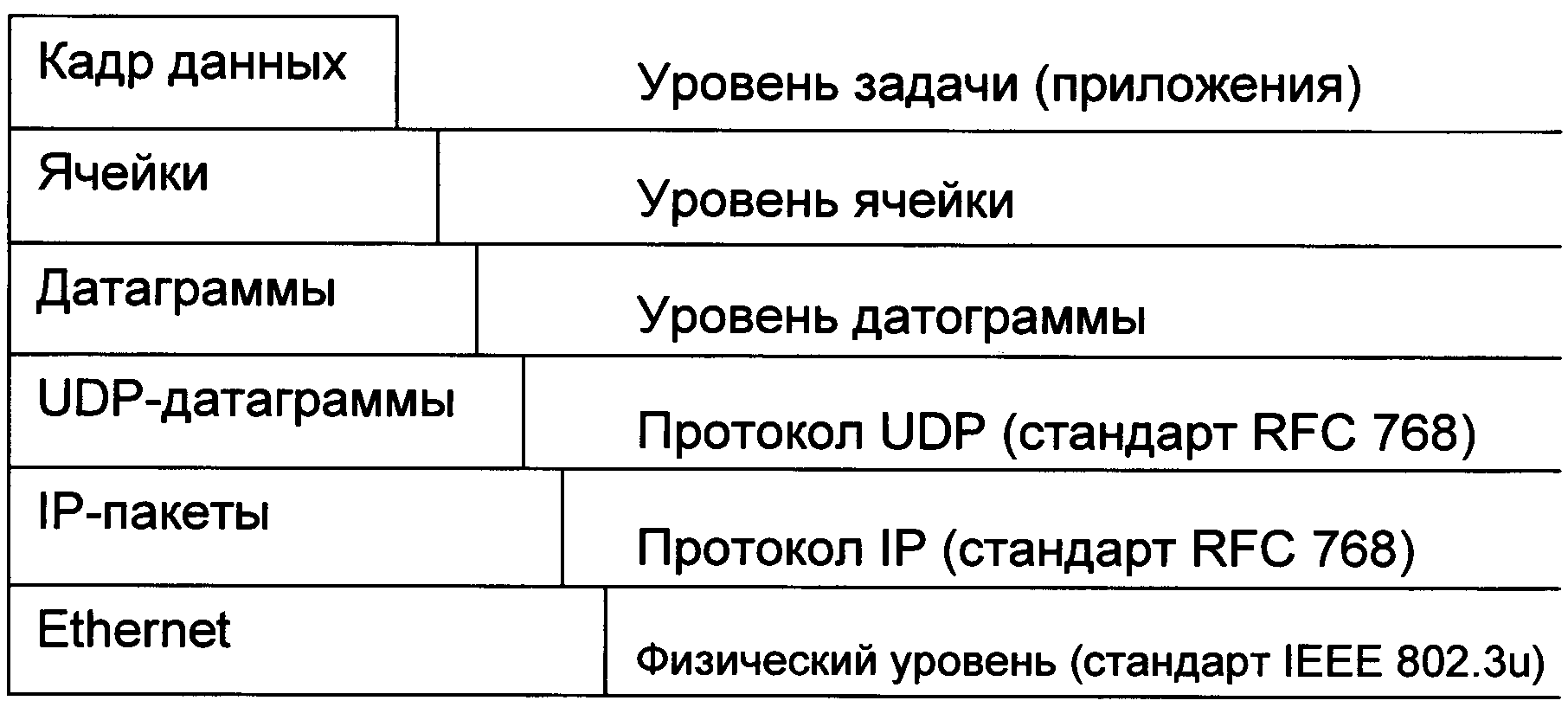
Система информационного обмена топопривязчика
Способ функционирования топопривязчика в режиме контрольно-корректирующей станции
Стенд для закалки валов и трубных деталей
Подвижные части автоматического стрелкового оружия
Ствольное оружие
Диоптрический прицел
Способ автоматизированного формирования локальных геодезических сетей высокого класса точности
Устройство для обработки текучим абразивом отверстий длинномерных деталей
Набор металлических каркасных конструкций для создания транспортной мебели
Учебно-тренировочный комплект для обучения операторов переносных зенитных ракетных комплексов
Система информационного обмена топопривязчика
Способ функционирования топопривязчика в режиме контрольно-корректирующей станции
Стенд для закалки валов и трубных деталей
Подвижные части автоматического стрелкового оружия
Ствольное оружие
Диоптрический прицел
Способ автоматизированного формирования локальных геодезических сетей высокого класса точности
Устройство для обработки текучим абразивом отверстий длинномерных деталей
Набор металлических каркасных конструкций для создания транспортной мебели
Учебно-тренировочный комплект для обучения операторов переносных зенитных ракетных комплексов

