Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЭТОГО
Вид РИД
Изобретение
Перекрестная ссылка на родственные заявки
[0001] Эта заявка основана и испрашивает приоритета заявки на патент Китая № 201510727596.X, поданной 30 октября 2015 года, полное содержание которой включено в настоящий документ по ссылке.
Область техники
[0002] Настоящее раскрытие в целом относится к беспилотному летательному аппарату (БПЛА; UAV), или дрону, в области безопасности и, в частности, к способу для управления БПЛА и устройству для этого.
Уровень техники
[0003] Рынок ориентированных на потребителя БПЛА привлекает все больше внимания, и много традиционных предприятий, которые производят ориентированные на потребителя БПЛА, и компании информационных технологий инвестируют огромные суммы денег и трудовые ресурсы в области разработки БПЛА. Большое количество обычных пользователей без соответствующей квалификации начинает эксплуатировать БПЛА для полетов ради развлечения, и чтобы попытаться позволить им летать за пределы расстояния обзора. Когда расстояние между БПЛА и его контроллером выходит за пределы расстояния обзора человека, пользователям трудно точно определить окружающую обстановку полета БПЛА, и, таким образом, это вызывает потенциальный риск для полета БПЛА.
Сущность изобретения
[0004] Чтобы решить проблему в технологиях предшествующего уровня техники, настоящее раскрытие обеспечивает способ управления беспилотным летательным аппаратом и устройство для этого.
[0005] В соответствии с первым аспектом вариантов осуществления настоящего раскрытия обеспечен способ управления беспилотным летательным аппаратом, включающий в себя:
[0006] определение, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека;
[0007] обнаружение, является ли исправной линия связи для возврата данных внешней системы БПЛА, причем внешняя система выполнена с возможностью обнаруживать окружающую обстановку полета БПЛА; и
[0008] когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управление БПЛА для ввода в защитный режим возврата.
[0009] В соответствии с реализацией настоящего раскрытия определение, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека, включает в себя:
[0010] сбор координат позиции БПЛА и координат позиции контроллера;
[0011] определение расстояния между БПЛА и контроллером в соответствии с координатами позиции БПЛА и координатами позиции контроллера; и
[0012] решение, выходит ли расстояние за пределы расстояния обзора человека.
[0013] Кроме того, сбор координат позиции БПЛА и координат позиции контроллера включают в себя:
[0014] сбор координат позиции БПЛА с использованием системы позиционирования БПЛА; и
[0015] прием координат позиции контроллера, отправленных от контроллера, причем координаты позиции контроллера собираются контроллером с использованием системы позиционирования контроллера,
[0016] причем система позиционирования БПЛА и система позиционирования контроллера содержат GPS, систему позиционирования базовой станции или систему позиционирования WiFi.
[0017] В качестве альтернативы расстояние обзора человека является значением по умолчанию или определяемым пользователем значением.
[0018] В качестве альтернативы внешняя система включает в себя по меньшей мере один элемент из камеры, системы инфракрасного датчика и камеры глубины резкости.
[0019] В качестве альтернативы управление БПЛА для ввода в защитный режим возврата включает в себя:
[0020] управление БПЛА, чтобы он летел обратно к позиции, в которой расположен контроллер; или
[0021] управление БПЛА, чтобы он летел обратно к позиции с предопределенными координатами.
[0022] В соответствии с другой реализацией настоящего раскрытия способ дополнительно включает в себя:
[0023] прием команды выхода из защитного режима возврата; и
[0024] в ответ на команду выхода из защитного режима возврата передачу управления БПЛА контроллеру.
[0025] В соответствии со вторым аспектом вариантов осуществления настоящего раскрытия обеспечено устройство для управления беспилотным летательным аппаратом, включающее в себя:
[0026] модуль определения, выполненный с возможностью определять, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека;
[0027] модуль обнаружения, выполненный с возможностью обнаруживать, является ли исправной линия связи для возврата данных внешней системы БПЛА, причем внешняя система выполнена с возможностью обнаруживать окружающую обстановку полета БПЛА; и
[0028] модуль управления, выполненный с возможностью, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управлять БПЛА для ввода в защитный режим возврата.
[0029] В соответствии с реализацией настоящего раскрытия модуль определения включает в себя:
[0030] подмодуль сбора, выполненный с возможностью собирать координаты позиции БПЛА и координаты позиции контроллера;
[0031] подмодуль определения, выполненный с возможностью определять расстояние между БПЛА и контроллером в соответствии с координатами позиции БПЛА и координатами позиции контроллера, собранными подмодулем сбора; и
[0032] подмодуль решения, выполненный с возможностью решать, выходит ли расстояние, определенное подмодулем определения, за пределы расстояния обзора человека.
[0033] Кроме того, подмодуль сбора выполнен с возможностью собирать координаты позиции БПЛА с использованием системы позиционирования БПЛА; принимать координаты позиции контроллера, отправленные от контроллера, причем координаты позиции контроллера собираются контроллером с использованием системы позиционирования контроллера, причем система позиционирования БПЛА и система позиционирования контроллера включают в себя GPS, систему позиционирования базовой станции или систему позиционирования WiFi.
[0034] В качестве альтернативы расстояние обзора человека является значением по умолчанию или определяемым пользователем значением.
[0035] В качестве альтернативы внешняя система включает в себя по меньшей мере один элемент из камеры, системы инфракрасного датчика и камеры глубины резкости.
[0036] В качестве альтернативы модуль управления выполнен с возможностью управлять БПЛА, чтобы он летел обратно в позицию, в которой расположен контроллер; или управлять БПЛА, чтобы он летел обратно в позицию с предопределенными координатами.
[0037] В соответствии с другой реализацией настоящего раскрытия устройство дополнительно включает в себя:
[0038] модуль приема, выполненный с возможностью принимать команду выхода из защитного режима возврата, причем
[0039] модуль управления выполнен с возможностью в ответ на команду выхода из защитного режима возврата передавать управление БПЛА контроллеру.
[0040] В соответствии с третьим аспектом вариантов осуществления настоящего раскрытия обеспечено устройство для управления беспилотным летательным аппаратом, содержащее:
[0041] процессор; и
[0042] память для хранения команд, исполняемых процессором;
[0043] причем процессор выполнен с возможностью:
[0044] определять, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека;
[0045] обнаруживать, является ли исправной линия связи для возврата данных внешней системы БПЛА, внешняя система выполнена с возможностью обнаруживать окружающую обстановку полета БПЛА; и
[0046] когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управлять БПЛА для ввода в защитный режим возврата.
[0047] Технические решения, предоставленные вариантами осуществления настоящего раскрытия, могут иметь следующие полезные.
[0048] Когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, пользователям трудно определить окружающую обстановку полета БПЛА. В таком случае управление БПЛА для ввода в защитный режим возврата может защитить БПЛА, приводя к уменьшению возможности, что БПЛА столкнется с окружающими его объектами, и увеличению безопасности БПЛА.
[0049] Следует понимать, что и приведенное выше общее описание и последующее подробное описание являются лишь иллюстративными и пояснительными и не ограничивают раскрытие.
Краткое описание чертежей
[0050] Прилагаемые чертежи, которые включены в это описание и составляют его часть, иллюстрируют варианты осуществления, совместимые с изобретением, и вместе с описанием служат для того, чтобы разъяснить принципы изобретения.
[0051] Фиг.1 - блок-схема последовательности операций, показывающая способ управления БПЛА в соответствии с иллюстративным вариантом осуществления.
[0052] Фиг.2 - блок-схема последовательности операций, показывающая другой способ управления БПЛА в соответствии с иллюстративным вариантом осуществления.
[0053] Фиг.3 - структурная блок-схема устройства для управления БПЛА в соответствии с иллюстративным вариантом осуществления.
[0054] Фиг.4 - структурная блок-схема другого устройства для управления БПЛА в соответствии с иллюстративным вариантом осуществления.
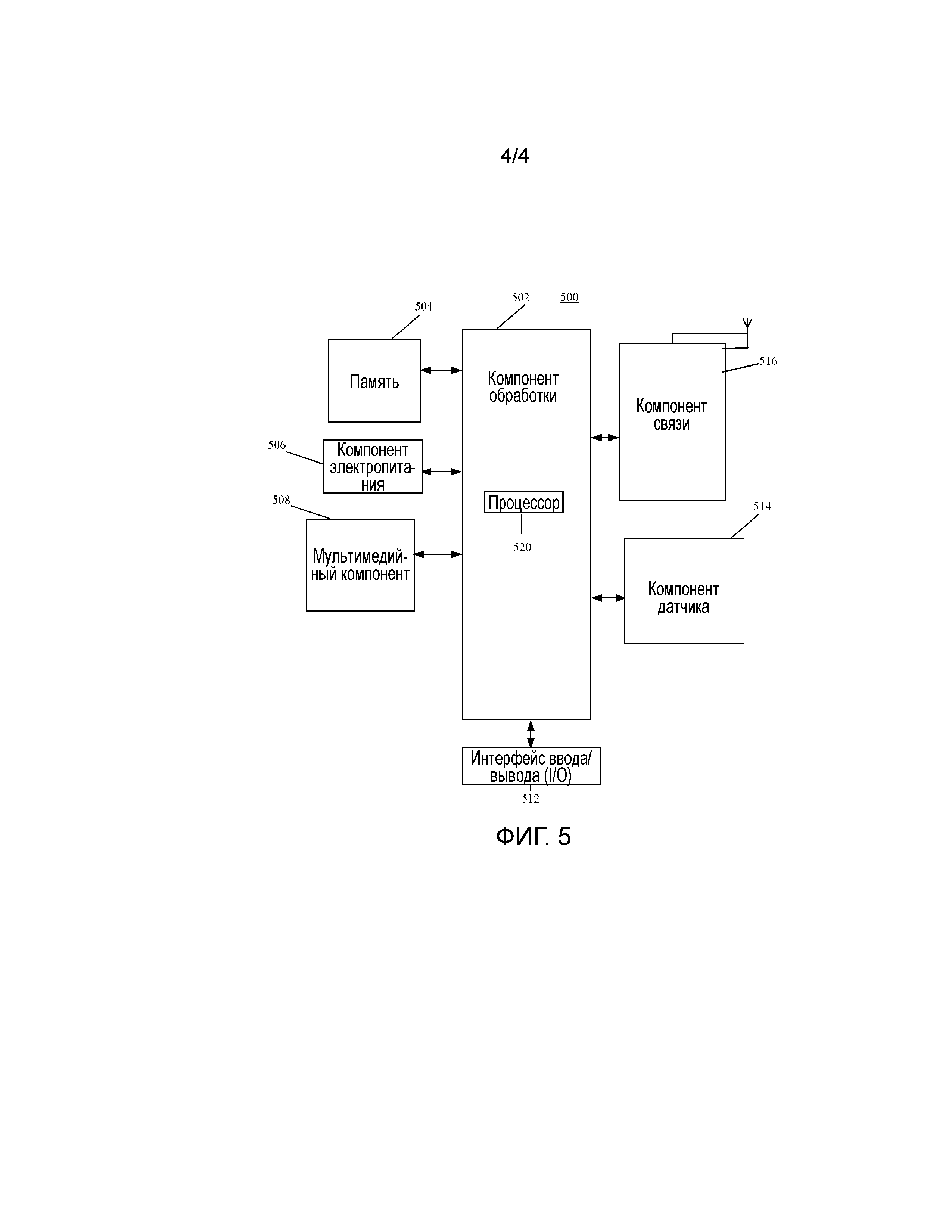
[0055] Фиг.5 - структурная блок-схема другого устройства для управления БПЛА в соответствии с иллюстративным вариантом осуществления.
Подробное описание
[0056] Теперь будет сделана ссылка на иллюстративные варианты осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Последующее описание относится к прилагаемым чертежам, на которых одинаковые номера на разных чертежах представляют одинаковые или подобные элементы, если не указано иначе. Реализации, изложенные в последующем описании иллюстративных вариантов осуществления, не представляют все реализации, совместимые с изобретением. Вместо этого они являются лишь примерами устройств и способов, совместимых с относящимися к изобретению аспектами, описанными в приложенной формуле изобретения.
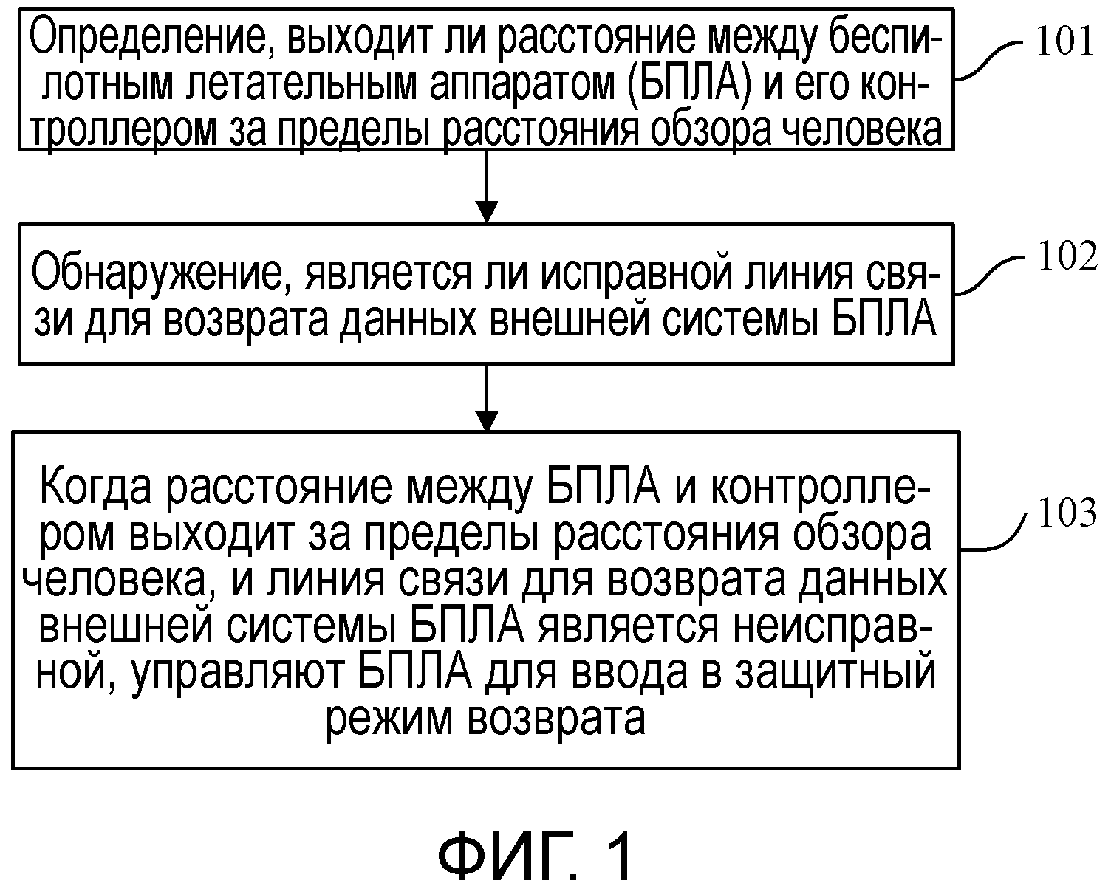
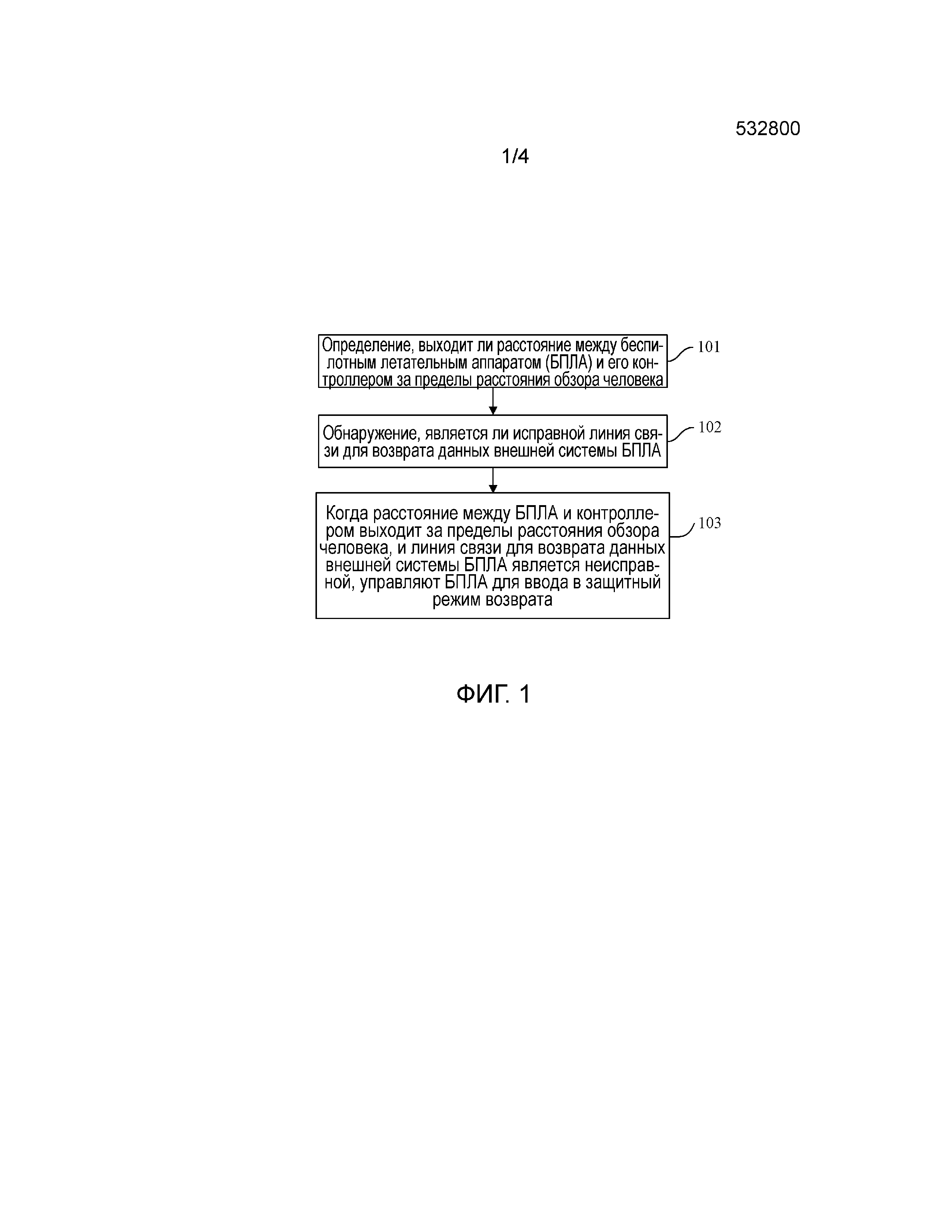
[0057] Фиг.1 является блок-схемой последовательности операций, показывающей способ управления БПЛА в соответствии с иллюстративным вариантом осуществления. Способ применяется к БПЛА и может включать в себя следующие этапы, как показано на фиг.1.
[0058] На этапе 101 определяется, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека.
[0059] Причем контроллер может представлять собой отдаленный или мобильный терминал. Расстояние обзора человека может представлять собой значение по умолчанию, установленное производителем, когда БПЛА поставляется; расстояние обзора человека также может являться определяемым пользователем значением, которое устанавливается пользователем с использованием отдаленного или мобильного терминала и т.д. во время работы.
[0060] На этапе 102 обнаруживается, является ли исправной линия связи для возврата данных внешней системы БПЛА.
[0061] Причем внешняя система выполнена с возможностью обнаруживать окружающую обстановку полета БПЛА, и линия связи для возврата данных выполнена с возможностью отправлять данные, обнаруженные внешней системой, об окружающей обстановке полета контроллеру, с тем чтобы пользователь мог проверить окружающую обстановку полета БПЛА при помощи контроллера.
[0062] На этапе 103, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управляют БПЛА для ввода в защитный режим возврата.
[0063] Причем управление БПЛА для ввода в защитный режим возврата включает в себя: управление БПЛА, чтобы он прилетел обратно в позицию, в которой расположен контроллер; или управление БПЛА, чтобы он прилетел обратно в позицию с предопределенными координатами.
[0064] В этом варианте осуществления в случае, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, что затрудняет для пользователей определить окружающую обстановку полета БПЛА, управляют БПЛА для ввода в защитный режим возврата. Это может защитить БПЛА, тем самым уменьшая возможность столкновения БПЛА и окружающих его объектов и повышая уровень безопасности БПЛА.
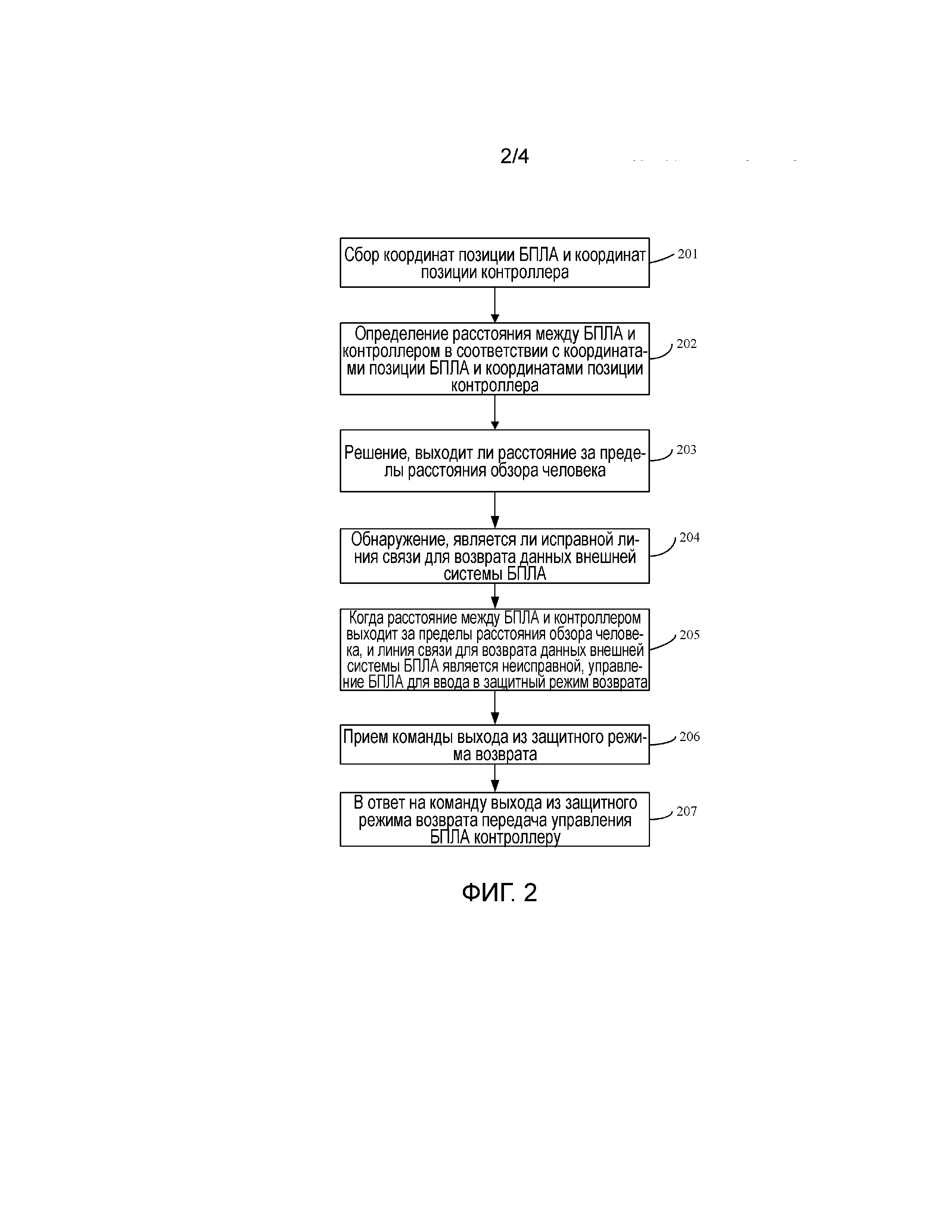
[0065] Фиг.2 является блок-схемой последовательности операций, показывающей другой способ управления БПЛА в соответствии с иллюстративным вариантом осуществления. Способ применяется к БПЛА, и в этом варианте осуществления внешняя система может представлять собой камеру, систему инфракрасного датчика или камеру глубины резкости (камеру DOF). Как показано на фиг.2, способ может включать в себя следующие этапы.
[0066] На этапе 201 собираются координаты позиции БПЛА и координаты позиции контроллера.
[0067] Причем контроллер может представлять собой отдаленный или мобильный терминал.
[0068] Этап 201 может включать в себя:
[0069] сбор координат позиции БПЛА с использованием системы позиционирования БПЛА;
[0070] прием координат позиции контроллера, отправленных от контроллера, причем координаты позиции контроллера собираются контроллером с использованием системы позиционирования контроллера.
[0071] Причем системы позиционирования могут включать в себя GPS, систему позиционирования базовой станции или систему позиционирования WiFi.
[0072] Следует отметить, что в этом варианте осуществления координаты позиции контроллера могут быть переданы через канал управления между контроллером и БПЛА, который является также каналом для передачи команды управления, отправленной от контроллера к БПЛА.
[0073] На этапе 202 расстояние между БПЛА и контроллером определяется в соответствии с координатами позиции БПЛА и координатами позиции контроллера.
[0074] Например, если координаты позиции БПЛА могут представлять собой (a1, b1), координаты позиции контроллера могут представлять собой (a2, b2), расстояние между БПЛА и контроллером может быть вычислено на основе формулы расстояния между двумя точками.
[0075] На этапе 203, определяется, выходит ли расстояние между БПЛА и контроллером за пределы расстояния обзора человека.
[0076] Причем расстояние обзора человека может представлять собой значение по умолчанию, установленное производителем, когда БПЛА поставляется; расстояние обзора человека также может являться определяемым пользователем значением, которое устанавливается пользователем с использованием отдаленного или мобильного терминала и т.д. во время работы.
[0077] Посредством выполнения этапов 201-203 можно определить, выходит ли расстояние между БПЛА и контроллером за пределы расстояния обзора человека.
[0078] На этапе 204 обнаруживается, является ли исправной линия связи для возврата данных внешней системы БПЛА.
[0079] Причем внешняя система выполнена на БПЛА с возможностью обнаруживать окружающую обстановку полета БПЛА, и линия связи для возврата данных выполнена с возможностью отправлять данные, обнаруженные внешней системой, об окружающей обстановке полета контроллеру, с тем чтобы пользователь мог проверить окружающую обстановку полета БПЛА при помощи контроллера. Предпочтительно линия связи для возврата данных является независимой от линии связи, через которую контроллер отправляет команду управления между контроллером и БПЛА, поэтому даже если линия связи для возврата данных является неисправной, передача координат позиции контроллера не может быть затронута.
[0080] Кроме того, внешняя система может включать в себя по меньшей мере один элемент из камеры, системы инфракрасного датчика и камеры глубины резкости.
[0081] Если внешняя система представляет собой камеру, то камера будет захватывать изображения вокруг БПЛА. Когда линия связи для возврата данных является исправной, захваченные изображения камеры (которые являются данными об окружающей обстановке полета) передаются мобильному терминалу пользователя через линию связи для возврата данных, позволяя пользователю точно определить окружающую обстановку полета БПЛА.
[0082] Если внешняя система представляет собой систему инфракрасного датчика или камеру глубины резкости, система инфракрасного датчика или камера глубины резкости могут воспринять информацию относительной позиции между БПЛА и объектами, окружающими его (которая представляет собой данные об окружающей обстановке полета). Когда линия связи для возврата данных является исправной, система инфракрасного датчика или камера глубины резкости могут передать воспринятую информацию относительной позиции мобильному терминалу пользователя.
[0083] В соответствии с реализацией этого варианта осуществления этап 204 может включать в себя:
[0084] периодическую отправку информации подтверждения установления связи контроллеру через линию связи для возврата данных; и
[0085] определение неисправной линии связи для возврата данных, если ответная информация, отправленная от контроллера, не принимается в пределах установленного промежутка времени.
[0086] На этапе 205, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управляют БПЛА для ввода в защитный режим возврата.
[0087] Причем управление БПЛА для ввода в защитный режим возврата включает в себя: управление БПЛА, чтобы он прилетел обратно в позицию, в которой расположен контроллер; или управление БПЛА, чтобы он прилетел обратно в позицию с предопределенными координатами.
[0088] Способ этого варианта осуществления может дополнительно включать в себя:
[0089] когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, в то время как линия связи для возврата данных внешней системы является исправной, или когда расстояние между БПЛА и контроллером находится в пределах расстояния обзора человека (независимо от того, является ли исправной линия связи для возврата данных внешней системы), управление БПЛА для обычного полета.
[0090] Причем, управление БПЛА для обычного полета означает передачу управления БПЛА контроллеру, что может включать в себя:
[0091] прием команды полета, отправленной от контроллера, которая может представлять собой одну команду или комбинацию из поворота налево, поворота направо, снижения, ускорения, замедления и так далее;
[0092] управление БПЛА, чтобы он летел в соответствии с принятой командой полета.
[0093] Когда БПЛА залетает обратно в пределы диапазона расстояния обзора, т.е. когда пользователи обнаруживают, что видят свой БПЛА, они могут выйти из защитного режима возврата вручную с использованием своего контроллера, чтобы передать управление БПЛА контроллеру, который затем вводит БПЛА в состояние обычного полета.
Таким образом, способ этого варианта осуществления может дополнительно включать в себя следующие этапы:
[0094] На этапе 206 принимается команда выхода из защитного режима возврата.
[0095] На этапе 207 в ответ на команду выхода из защитного режима возврата управление БПЛА передается контроллеру.
[0096] Следует отметить, что в реализациях временная последовательность этапов 201-203 и этапа 204 не ограничена. Этапы 201-203 и этап 204 могут быть выполнены в одно и то же время; или этапы 201-203 могут быть выполнены сначала, и когда расстояние между БПЛА и его контроллером выходит за пределы расстояния обзора человека, тогда выполняется этап 204; или этап 204 может быть выполнен сначала, и когда линия связи для возврата данных внешней системы БПЛА является неисправной, тогда выполняются этапы 201-203.
[0097] Кроме того, способ может дополнительно включать в себя:
[0098] когда расстояние между БПЛА и контроллером находится в пределах диапазона расстояния обзора, в то время как линия связи для возврата данных внешней системы является неисправной, БПЛА управляют, чтобы он летал в пределах диапазона расстояния обзора человека. При этом управление БПЛА, чтобы он летал в пределах диапазона расстояния обзора человека, может дополнительно повысить уровень безопасности полета БПЛА.
[0099] В реализациях пользователи могут отправить своему БПЛА команды запрета полета за пределами расстояния обзора посредством управления контроллером в некоторых сценариях. Один сценарий состоит в том, что во время полета БПЛА, когда БПЛА летит обратно в пределы диапазона расстояния обзора, т.е. когда пользователи обнаруживают свой БПЛА в поле зрения, вследствие того, что линия связи для возврата данных является неисправной, пользователи не могут узнать окружающую обстановку полета своего БПЛА. Другой сценарий состоит в том, что БПЛА просто взлетает (управляемый новыми пользователями).
[00100] В таком случае способ может дополнительно включать в себя:
[00101] прием команды запрета полета за пределами расстояния обзора;
[00102] в ответ на команду запрета полета за пределами расстояния обзора управление БПЛА, чтобы он летал в пределах расстояния обзора.
[00103] Причем управление БПЛА, чтобы он летал в пределах расстояния обзора, может дополнительно включать в себя:
[00104] обнаружение расстояния между БПЛА и контроллером; и
[00105] когда расстояние между БПЛА и контроллером достигает расстояния обзора, управление БПЛА, чтобы он летел к контроллеру.
[00106] В случае, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, что затрудняет для пользователей определить окружающую обстановку полета БПЛА, БПЛА вводится в защитный режим возврата. Это может защитить БПЛА, тем самым уменьшая возможность столкновения БПЛА и окружающих его объектов и повышая уровень безопасности БПЛА.
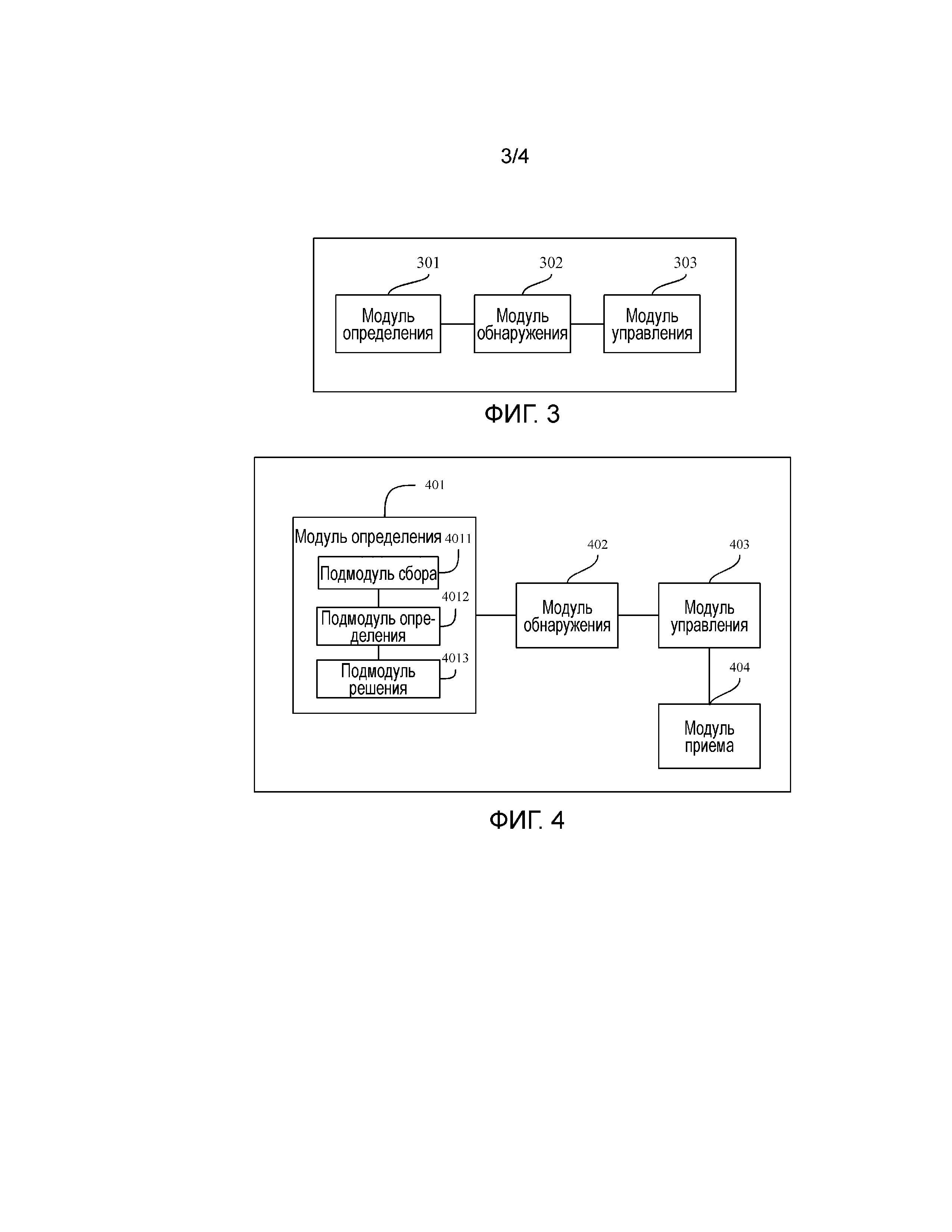
[00107] Фиг.3 является структурной блок-схемой устройства для управления БПЛА в соответствии с иллюстративным вариантом осуществления. Как показано на фиг.3, устройство может включить в себя модуль 301 определения, модуль 302 обнаружения и модуль 303 управления.
[00108] Модуль 301 определения выполнен с возможностью определять, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека.
[00109] Модуль 302 обнаружения выполнен с возможностью обнаруживать, является ли исправной линия связи для возврата данных внешней системы БПЛА.
[00110] Модуль 303 управления выполнен с возможностью, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управлять БПЛА для ввода в защитный режим возврата.
[00111] Причем контроллер может представлять собой отдаленный или мобильный терминал. Расстояние обзора человека может представлять собой значение по умолчанию, установленное производителем, когда БПЛА поставляется; расстояние обзора человека также может являться определяемым пользователем значением, которое устанавливается пользователем с использованием отдаленного или мобильного терминала и т.д. во время работы.
[00112] Причем внешняя система выполнена с возможностью обнаруживать окружающую обстановку полета БПЛА, и линия связи для возврата данных выполнена с возможностью отправлять данные, обнаруженные внешней системой, об окружающей обстановке полета контроллеру, с тем чтобы пользователь мог проверить окружающую обстановку полета БПЛА при помощи контроллера.
[00113] В этом варианте осуществления в случае, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, что затрудняет для пользователей определить окружающую обстановку полета БПЛА, управляют БПЛА для ввода в защитный режим возврата. Это может защитить БПЛА, тем самым уменьшая возможность столкновения БПЛА и окружающих его объектов и повышая уровень безопасности БПЛА.
[00114] Фиг.4 является структурной блок-схемой устройства для управления БПЛА в соответствии с иллюстративным вариантом осуществления. Как показано на фиг.4, устройство может включать в себя модуль 401 определения, модуль 402 обнаружения и модуль 403 управления.
[00115] Модуль 401 определения выполнен с возможностью определять, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека.
[00116] Модуль 402 обнаружения выполнен с возможностью обнаружения, является ли исправной линия связи для возврата данных внешней системы БПЛА.
[00117] Модуль 403 управления, выполненный с возможностью, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управлять БПЛА для ввода в защитный режим возврата.
[00118] Причем контроллер может представлять собой отдаленный или мобильный терминал. Расстояние обзора человека может представлять собой значение по умолчанию, установленное производителем, когда БПЛА поставляется; расстояние обзора человека также может являться определяемым пользователем значением, которое устанавливается пользователем с использованием отдаленного или мобильного терминала и т.д. во время работы.
[00119] Причем внешняя система выполнена на БПЛА с возможностью обнаруживать окружающую обстановку полета БПЛА, и линия связи для возврата данных выполнена с возможностью отправлять данные, обнаруженные внешней системой, об окружающей обстановке полета контроллеру, с тем чтобы пользователь мог проверить окружающую обстановку полета БПЛА при помощи контроллера. Предпочтительно линия связи для возврата данных является независимой от линии связи, через которую контроллер отправляет команду управления между контроллером и БПЛА, поэтому даже если линия связи для возврата данных является неисправной, передача координат позиции контроллера не может быть затронута.
[00120] Кроме того, внешняя система может включать в себя по меньшей мере одно из камеры, системы инфракрасного датчика и камеры глубины резкости.
[00121] Если внешняя система представляет собой камеру, то камера будет захватывать изображения вокруг БПЛА. Когда линия связи для возврата данных является исправной, захваченные изображения камеры (которые являются данными об окружающей обстановке полета) передаются мобильному терминалу пользователя через линию связи для возврата данных, позволяя пользователю точно определить окружающую обстановку полета БПЛА.
[00122] Если внешняя система представляет собой систему инфракрасного датчика или камеру глубины резкости, система инфракрасного датчика или камера глубины резкости могут воспринять информацию относительной позиции между БПЛА и объектами, окружающими его (которая представляет собой данные об окружающей обстановке полета). Когда линия связи для возврата данных является исправной, система инфракрасного датчика или камера глубины резкости могут передать воспринятую информацию относительной позиции мобильному терминалу пользователя.
[00123] Кроме того, модуль 403 управления выполнен с возможностью управлять БПЛА, чтобы он летел обратно в позицию, в которой расположен контроллер; или управлять БПЛА, чтобы он летел обратно в позицию с предопределенными координатами.
[00124] Кроме того, модуль 401 определения включает в себя подмодуль 4011 сбора, подмодуль 4012 определения и подмодуль 4013 решения.
[00125] Подмодуль 4011 сбора выполнен с возможностью собирать координаты позиции БПЛА и координаты позиции контроллера.
[00126] Подмодуль 4012 определения выполнен с возможностью определять расстояние между БПЛА и контроллером в соответствии с координатами позиции БПЛА и координатами позиции контроллера, собранными подмодулем 4011 сбора.
[00127] Подмодуль 4013 решения выполнен с возможностью решить, выходит ли расстояние, определенное подмодулем определения, за пределы расстояния обзора человека.
[00128] Кроме того, подмодуль 4011 сбора выполнен с возможностью собирать координаты позиции БПЛА с использованием системы позиционирования БПЛА; принимать координаты позиции контроллера, отправленные от контроллера, координаты позиции контроллера собираются контроллером с использованием системы позиционирования контроллера.
[00129] Причем система позиционирования БПЛА и система позиционирования контроллера могут включить в себя GPS, систему позиционирования базовой станции или систему позиционирования WiFi.
[00130] Следует отметить, что в этом варианте осуществления координаты позиции контроллера могут быть переданы через канал управления между контроллером и БПЛА, который является также каналом для передачи команды управления, отправленной от контроллера к БПЛА.
[00131] В соответствии с реализацией вариантов осуществления настоящего раскрытия устройство может дополнительно включать в себя: модуль 404 приема, выполненный с возможностью принимать команду выхода из защитного режима возврата. Модуль 403 управления дополнительно выполнен с возможностью в ответ на команду выхода из защитного режима возврата, принятого модулем 404 приема, передавать управление БПЛА контроллеру.
[00132] Следует отметить, что в этом варианте осуществления модуль 403 управления дополнительно выполнен с возможностью, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, в то время как линия связи для возврата данных внешней системы является исправной, или когда расстояние между БПЛА и контроллером находится в пределах расстояния обзора человека (независимо от того, является ли исправной линия связи для возврата данных внешней системы), управлять БПЛА для обычного полета, т.е. передать контроль над БПЛА контроллеру и управлять БПЛА, чтобы он летал в соответствии с командой полета контроллера.
[00133] Кроме того, модуль 404 приема дополнительно выполнен с возможностью принимать команду полета, отправленную от контроллера, которая может представлять собой одну команду или комбинацию из поворота налево, поворота направо, снижения, ускорения, замедления и так далее.
[00134] Кроме того, модуль 403 управления дополнительно выполнен с возможностью управлять БПЛА, чтобы он летал в соответствии с принятой командой полета.
[00135] Кроме того, модуль 403 управления дополнительно выполнен с возможностью, когда расстояние между БПЛА и контроллером находится в пределах диапазона расстояния обзора, в то время как линия связи для возврата данных внешней системы является неисправной, управлять БПЛА, чтобы он летал в пределах диапазона расстояния обзора человека. При этом управление БПЛА, чтобы он летал в пределах диапазона расстояния обзора человека, может дополнительно повысить уровень безопасности полета БПЛА.
[00136] В реализациях пользователи могут отправить своему БПЛА команды запрета полета за пределами расстояния обзора посредством работы контроллера в некоторых сценариях. Один сценарий состоит в том, что во время полета БПЛА, когда БПЛА летит обратно в пределы диапазона расстояния обзора, т.е. когда пользователи обнаруживают свой БПЛА в поле зрения, вследствие того, что линия связи для возврата данных является неисправной, пользователи не могут узнать окружающую обстановку полета своего БПЛА. Другой сценарий состоит в том, что БПЛА просто взлетает (приводимый в действие новыми пользователями). Модуль приема дополнительно выполнен с возможностью принимать команду запрета полета за пределами расстояния обзора; и модуль управления дополнительно выполнен с возможностью в ответ на команду запрета полета за пределами расстояния обзора управлять БПЛА, чтобы он летал в пределах расстояния обзора.
[00137] Кроме того, модуль 403 управления дополнительно выполнен с возможностью обнаруживать расстояние между БПЛА и контроллером, и когда расстояние между БПЛА и контроллером достигает расстояния обзора, управлять БПЛА, чтобы он летел к контроллеру.
[00138] В этом варианте осуществления в случае, когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, что затрудняет для пользователей определить окружающую обстановку полета БПЛА, БПЛА управляется для ввода в защитный режим возврата. Это может защитить БПЛА, тем самым уменьшая возможность столкновения БПЛА и окружающих его объектов и повышая уровень безопасности БПЛА.
[00139] Фиг.5 является структурной блок-схемой устройства 500 для управления БПЛА в соответствии с иллюстративным вариантом осуществления. Например, устройством 500 может быть БПЛА и т.п.
[00140] Согласно фиг.5 устройство 500 может включить в себя один или более из следующих компонентов: компонент 502 обработки, память 504, компонент 506 электропитания, мультимедийный компонент 508, интерфейс 512 ввода/вывода (I/O), компонент 514 датчика и компонент 516 связи.
[00141] Компонент 502 обработки обычно управляет всеми операциями устройства 500, такими как операции, связанные с передачей данных, операции камеры и операции записи. Компонент 502 обработки может включать в себя один или несколько процессоров 520 для исполнения команд для выполнения всех или части этапов в описанных выше способах. Кроме того, компонент 502 обработки может включать в себя один или более модулей, которые содействуют взаимодействию между компонентом 502 обработки и другими компонентами. Например, компонент 502 обработки может включать в себя мультимедийный модуль для содействия взаимодействию между мультимедийным компонентом 508 и компонентом 502 обработки.
[00142] Память 504 выполнена с возможностью хранить различные типы данных для поддержки работы устройства 500. Примеры таких данных включают в себя команды для любых приложений или способов, работающих на устройстве 500. Память 504 может быть реализована с использованием устройств энергозависимой или энергонезависимой памяти любого типа или их комбинации, таких как статическое оперативное запоминающее устройство (СОЗУ; SRAM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ; EEPROM), стираемое программируемое постоянное запоминающее устройство (СППЗУ; EPROM), программируемое постоянное запоминающее устройство (ППЗУ), постоянное запоминающее устройство (ПЗУ), магнитная память, флэш-память, магнитный или оптический диск.
[00143] Компонент 506 электропитания обеспечивает электропитание различным компонентам устройства 500. Компонент 506 электропитания может включать в себя систему управления питанием, один или более источников электропитания и любые другие компоненты, связанные с генерированием, управлением и распределением электропитания в устройстве 500.
[00144] Мультимедийный компонент 508 включает в себя по меньшей мере одну камеру. Когда устройство 500 находится в режиме работы, таком как режим фотографирования или режим видео, камера может принимать внешние мультимедийные данные. Каждая камера может являться системой с фиксированной оптической линзой или иметь возможность фокусировки и оптического масштабирования.
[00145] Интерфейс 512 ввода/вывода обеспечивает интерфейс между компонентом 502 обработки и модулями периферийного интерфейса, такими как клавиатура, круг с кнопками, кнопки и т.п.
[00146] Компонент 514 датчика включает в себя один или более датчиков для обеспечения оценки статуса различных аспектов устройства 500. Например, компонент 514 датчика может обнаруживать окружающую обстановку, в которой расположено устройство 500. Компонент 514 датчика может включать в себя инфракрасный датчик, дополнительно выполненный с возможностью обнаруживать расстояния от устройства 500 до объектов, окружающих объект 500. Компонент 514 датчика также может включать в себя светочувствительный датчик, такой как датчик изображений на комплементарных металлооксидных полупроводниках (КМОП; CMOS) или на приборах с зарядовой связью (ПЗС; CCD), для использования в приложениях обработки изображений. В некоторых вариантах осуществления компонент 514 датчика также может включать в себя акселерометр, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00147] Компонент 516 связи выполнен для содействия проводной или беспроводной связи между устройством 500 и другими устройствами. Устройство 500 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G или 3G, или их комбинации. В одном иллюстративном варианте осуществления компонент 516 связи принимает сигнал широковещания или информацию широковещательной передачи от внешней системы управления широковещательной передачи через канал широковещания. В одном иллюстративном варианте осуществления компонент 516 связи дополнительно включает в себя модуль связи малого радиуса действия (NFC), чтобы обеспечить возможность ближней связи. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), технологии ультраширокополосной передачи (UWB), технологии Bluetooth (BT) и других технологий.
[00148] В иллюстративных вариантах осуществления устройство 500 может быть реализовано с помощью одной или более специализированных интегральных схем (СИС; ASIC), процессоров цифровой обработки сигналов (ПЦОС; DSP), устройств цифровой обработки сигналов (УЦОС; DSPD), программируемых логических интегральных схем (ПЛИС; PLD), программируемых пользователем вентильных матриц (ППВМ; FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для выполнения описанных выше способов.
[00149] В иллюстративных вариантах осуществления также обеспечен энергонезависимый машиночитаемый запоминающий носитель, включающий в себя команды, такие как включенные в память 504, исполнимые процессором 520 в устройстве 500, для выполнения описанных выше способов. Например, энергонезависимый машиночитаемый запоминающий носитель может представлять собой ПЗУ, ОЗУ, компакт-диск только для чтения (CD-ROM), магнитную ленту, гибкий диск, оптическое устройство хранения данных и т.п.
[00150] Также обеспечен энергонезависимый машиночитаемый запоминающий носитель, хранящий команды, исполняемые процессором беспилотного летательного аппарата (БПЛА), позволяющие БПЛА выполнить способ управления БПЛА, включающий в себя:
[00151] определение, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека;
[00152] обнаружение, является ли исправной линия связи для возврата данных внешней системы БПЛА, внешняя система выполнена с возможностью обнаруживать окружающую обстановку полета БПЛА; и
[00153] когда расстояние между БПЛА и контроллером выходит за пределы расстояния обзора человека, и линия связи для возврата данных внешней системы является неисправной, управление БПЛА для ввода в защитный режим возврата.
[00154] В соответствии с реализацией настоящего раскрытия определение, выходит ли расстояние между беспилотным летательным аппаратом (БПЛА) и его контроллером за пределы расстояния обзора человека, включает в себя:
[00155] сбор координат позиции БПЛА и координат позиции контроллера;
[00156] определение расстояния между БПЛА и контроллером в соответствии с координатами позиции БПЛА и координатами позиции контроллера; и
[00157] решение, выходит ли расстояние за пределы расстояния обзора человека.
[00158] Кроме того, сбор координат позиции БПЛА и координат позиции контроллера включает в себя:
[00159] сбор координат позиции БПЛА с использованием системы позиционирования БПЛА; и
[00160] прием координат позиции контроллера, отправленных от контроллера, координаты позиции контроллера собираются контроллером с использованием системы позиционирования контроллера,
[00161] причем система позиционирования БПЛА и система позиционирования контроллера включают в себя GPS, систему позиционирования базовой станции или систему позиционирования WiFi.
[00162] В качестве альтернативы расстояние обзора человека является значением по умолчанию или определяемым пользователем значением.
[00163] В качестве альтернативы внешняя система включает в себя по меньшей мере одно из камеры, системы инфракрасного датчика и камеры глубины резкости.
[00164] В качестве альтернативы управление БПЛА для ввода в защитный режим возврата включает в себя:
[00165] управление БПЛА, чтобы он летел обратно к позиции, в которой расположен контроллер; или
[00166] управление БПЛА, чтобы он летел обратно к позиции с предопределенными координатами.
[00167] В соответствии с другой реализацией настоящего раскрытия способ дополнительно включает в себя:
[00168] прием команды выхода из защитного режима возврата; и
[00169] в ответ на команду выхода из защитного режима возврата передачу управления БПЛА контроллеру.
[00170] Другие варианты осуществления изобретения будут очевидны для специалистов в области техники на основе рассмотрения описания и практики раскрытого здесь изобретения. Предполагается, что эта заявка охватывает любые изменения, употребления или адаптации изобретения, которые следуют его общим принципам и включают в себя такие отклонения от настоящего раскрытия, которые согласуются с известной или обычной практикой применения в области техники. Предполагается, что описание и примеры будут рассматриваться лишь как иллюстративные, и истинные объем и сущность изобретения обозначены посредством последующей формулы изобретения.
[00171] Очевидно, что настоящее изобретение не ограничено точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны без отступления от его объема. Предполагается, что объем изобретения должен быть ограничен только приложенной формулой изобретения.
Способ, система и соответствующие устройства обработки переключения каналов
Способ и устройство для отображения информации уведомления
Способ, устройство и система для управления доступом к маршрутизатору
Способ и устройство для обработки pwm-данных
Способ и устройство для получения информации
Способ настройки параметров сетевого соединения и его устройство
Способ и устройство для блокировки файла
Способ и устройство для управления доступом интеллектуального устройства
Способ и устройство для выполнения настраивания
Способ и устройство для управления интеллектуальным жилищным устройством
Способ, система и соответствующие устройства обработки переключения каналов
Способ и устройство для отображения информации уведомления
Способ, устройство и система для управления доступом к маршрутизатору
Способ и устройство для обработки pwm-данных
Способ и устройство для получения информации
Способ настройки параметров сетевого соединения и его устройство
Способ и устройство для блокировки файла
Способ и устройство для управления доступом интеллектуального устройства
Способ и устройство для выполнения настраивания
Способ и устройство для управления интеллектуальным жилищным устройством

