Универсальная роботизированная платформа
Вид РИД
Изобретение
Изобретение относится к военной и специальной технике, а именно к самодвижущимся платформам робототехнических комплексов, предназначенным для ведения дистанционной работы в боевых условиях: сбора и передачи разведывательной информации, огневого прикрытия, обнаружения и огневого поражения различного вида целей.
Известен робототехническом комплексе разведки и огневой поддержки (см. патент RU №2548207 С1, опубл. 20.04.2015, бюл. №11), принятый за прототип. Робототехнический комплекс построен по модульному принципу и содержит следующие функционально законченные модули: платформу, представляющую собой базовое шасси с системой управления движением, средствами связи, пунктом дистанционного управления и системой электропитания, навесное оборудование: боевой модуль с комплектом вооружения и пунктом дистанционного управления, разведывательный модуль. Составные части комплекса выполнены с возможностью реализации задач по назначению самостоятельно. Шасси выполнено в гусеничном варианте с возможностью передвижения в городских условиях, по пересеченной местности, преодоления препятствий, разворота на 360° на месте, с возможностью обеспечения максимальной скорости передвижения до 25 км/ч. Корпус шасси - несущий, сварной из броневых стальных листов. Система управления платформой дополнительно оснащена системой топопривязки и ориентирования, выполненной с возможностью начального определения координат с помощью аппаратуры спутниковой навигации, определения азимута продольной оси шасси, выставления известного азимута, непрерывного расчета координат местоположения и углов крена, тангажа, азимута. Система электропитания робототехнического комплекса имеет два номинала напряжения для силовой установки движителя и бортовую сеть питания аппаратуры и навесное оборудование. Для каждого номинала напряжения предусмотрена литий-железофосфатная аккумуляторная батарея. Система электропитания оснащена микропроцессорным блоком контроля заряда, выполненным с возможностью регулирования, контроля зарядного тока, а также контроля и устранения дисбаланса заряда каждого элемента аккумуляторной батареи. Роботизированный комплекс дополнительно оснащен системой предупреждения столкновений, принцип действия которой основан на обработке сигналов с ультразвуковых датчиков.
Недостатками прототипа являются:
- ограниченные функциональные возможности основных систем мобильного робота, обеспечивающих его управляемость, ориентацию в пространстве, информационный обмен, предупреждение столкновений;
- недостаточная эффективность системы технического зрения;
- несовершенная система подвески шасси;
- низкая эффективность системы связи и передачи данных;
- отсутствие мониторинга состояния независимых электроприводов;
- отсутствие оптимальных алгоритмов управления движением платформы;
- низкая оснащенность пункта дистанционного управления.
Предлагаемым изобретением решается задача по повышению эффективности и надежности универсальных роботизированных платформ, обеспечивающих установку полезной нагрузки различной функциональной направленности.
Технический результат, получаемый при осуществлении изобретения, заключается в создании универсальной роботизированной платформы, обеспечивающей установку дополнительного оборудования - целевой нагрузки: систем вооружения различных типов, средств разведки и целеуказания и транспортировочного оборудования, высокую управляемость в реальных климатических условиях, автономное ориентирование, определение собственных координат местоположения по сигналам спутниковой навигации, в режиме одометрической навигации и в комплексированном режиме, определение углового положения в пространстве, передачу данных по цифровому радиоканалу о состоянии платформы, прием по цифровому радиоканалу команд управления от пункта дистанционного управления, передачу по радиоканалу маскированного телевизионного сигнала от ТВ-камер.
Указанный технический результат достигается тем, что в предлагаемой универсальной роботизированной платформе, содержащей бронированное гусеничное шасси с приводом, системой независимых индивидуальных подвесок и системой управления, оснащенной системой топопривязки и ориентирования, средства связи, пункт дистанционного управления и систему электропитания, систему предупреждения столкновений, пункт дистанционного управления, новым является то, что в состав универсальной роботизированной платформы включены две ТВ-камеры переднего обзора, составляющие стереоскопическую пару, и одна ТВ-камера заднего обзора, приводы левого и правого борта платформы выполнены в виде независимых электроприводов на базе бесколлекторных трехфазных двигателей с редуктором и раздельными силовыми блоками управления, система независимых индивидуальных подвесок состоит из четырех обрезиненных катков по каждому борту, рычаги подвесок расположены «по ходу» платформы, газонаполненные амортизаторы со спиральными пружинами наклонены в противоположную сторону движения, средства связи состоят из двух каналов: канала управления и телеметрии, построенного на базе цифровых коротковолновых приемопередатчиков, и канала для передачи сигнала от трех ТВ-камер, состоящего из устройства маскирования телевизионного сигнала и многоканального телевизионного передатчика, телеметрические данные, передаваемые от платформы, предоставляются по запросу двух типов: телеметрия по маске или телеметрия в полном объеме, программное обеспечение платформы состоит из двух уровней: уровень обеспечения сопряжения с аппаратными средствами (драйверы) и прикладной (управляющий) уровень, алгоритм управления движением при наличии следующих исходных данных: текущие координаты местоположения, текущее угловое положение платформы в пространстве, текущие скорости движения, заданные точки маршрута, разворот, параметры маршрута и команда пауза/старт, выполнен с возможностью получения следующих выходных данных: сигналы акселератора на правый и левый борт, направление движения левого и правого борта, сигналы торможения двигателей, управление редукторами бортов и программный сигнал завершения движения, алгоритм выработки рассогласования бортов по скорости в зависимости от типа задания маршрута выполнен с возможностью реализации одним из двух способов: движение по кусочно-линейному маршруту или движение по гладкой траектории (квадратичная аппроксимация), пункт дистанционного управления состоит из двух рабочих мест: оператора универсальной роботизированной платформы и оператора, управляющего целевой нагрузкой, рабочее место оператора платформы, оснащенное персональной ЭВМ со средствами отображения, средствами связи с платформой, пультом управления движением платформы, обеспечивает доставку платформы в указанную точку, контроль движения платформы, контроль за состоянием приборов и подсистем платформы.
Включение в состав универсальной роботизированной платформы двух ТВ-камер переднего обзора и одной ТВ-камеры заднего обзора позволяет:
- обеспечить возможность «скалывания» с изображения камер переднего обзора точек с последующим расчетом их пространственных координат;
- обеспечить контроль оператором перемещения платформы задним ходом.
Выполнение приводов левого и правого борта платформы в виде независимых электроприводов на базе бесколлекторных трехфазных двигателей с редуктором и раздельными силовыми блоками управления позволяет:
- развивать максимальную мощность во всем диапазоне скорости движения платформы;
- обеспечивать контроль скорости вращения, токи потребления и температуру двигателя и блока управления.
Включение в состав системы независимых индивидуальных подвесок четырех обрезиненных катков по каждому борту, рычагов подвесок, расположенных «по ходу» платформы, газонаполненных амортизаторов со спиральными пружинами, наклоненных в противоположную сторону движения, позволяет:
- уменьшить вес подвески, отнесенный к весу платформы;
- обеспечить простоту конструкции и технологичность узлов;
- получить при установке пневмогидравлических амортизаторов требуемую плавность хода;
- обеспечить за счет спиральных пружин подвески больший запас упругости системы и требуемые частоты собственных колебаний с обеспечением ходов катков в широком диапазоне.
Организация средств связи в составе двух каналов: канала управления и телеметрии и канала для передачи сигнала от ТВ-камер, позволяет:
- использовать серийные коротковолновые средства связи, обладающие широкими функциональными возможностями;
- включать в состав канала передачи ТВ-сигнала устройство маскирования.
Представление телеметрических данных, передаваемых от платформы, по запросу двух типов: телеметрия по маске или телеметрия в полном объеме, позволяет:
- обеспечить при передаче телеметрии по ранее установленной маске сокращение объема передаваемой информации;
- обеспечить при передаче телеметрии в полном объеме получение детальной информации: геодезических данных, состояния ТВ-камер, аккумуляторных батарей, станции питания и приводов, внешней обстановки.
Формирование двухуровневого программного обеспечения платформы: уровня обеспечения сопряжения с аппаратными средствами и прикладного уровня, позволяет:
- обеспечить сопряжение прикладного (управляющего) уровня программного обеспечения с аппаратными средствами платформы, выполняя при этом первичную обработку информации;
- распределять потоки данных от драйверов устройств;
- обеспечить независимость, доступность для корректировки и максимально возможный срок актуальности.
Выполнение алгоритма управления движением при наличии исходных данных о местоположении, ориентации и текущей скорости движения платформы, параметрах маршрута с возможностью получения выходных данных с сигналами управления для исполнительных механизмов платформы позволяет:
- обеспечить адаптивное управление движением платформы в зависимости от внешних условий;
- сформировать маршрут ее следования;
- обеспечить необходимую точность следованию по маршруту.
Выполнение алгоритма выработки рассогласования бортов по скорости в зависимости от типа задания маршрута с возможностью реализации одним из двух способов: движение по кусочно-линейному маршруту или движение по гладкой траектории (квадратичная аппроксимация), позволяет:
- обеспечить при движении по кусочно-линейному маршруту движение платформы по прямой линии от точки к точке, поворот на угол в узлах;
- обеспечить при движении по гладкой траектории плавное движение по траектории без остановок (кроме случаев острых углов) на максимально возможной скорости.
Включение в пункт дистанционного управления двух рабочих мест: оператора универсальной роботизированной платформы и оператора, управляющего целевой нагрузкой, позволяет:
- обеспечить доставку платформы в указанную точку, контроль ее движения, контроль за состоянием приборов и подсистем;
- обеспечить работу оператора с цифровыми картами местности, совместимыми с ГИС «Интеграция»;
- обеспечить оператору возможность ручного управления движением платформы.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
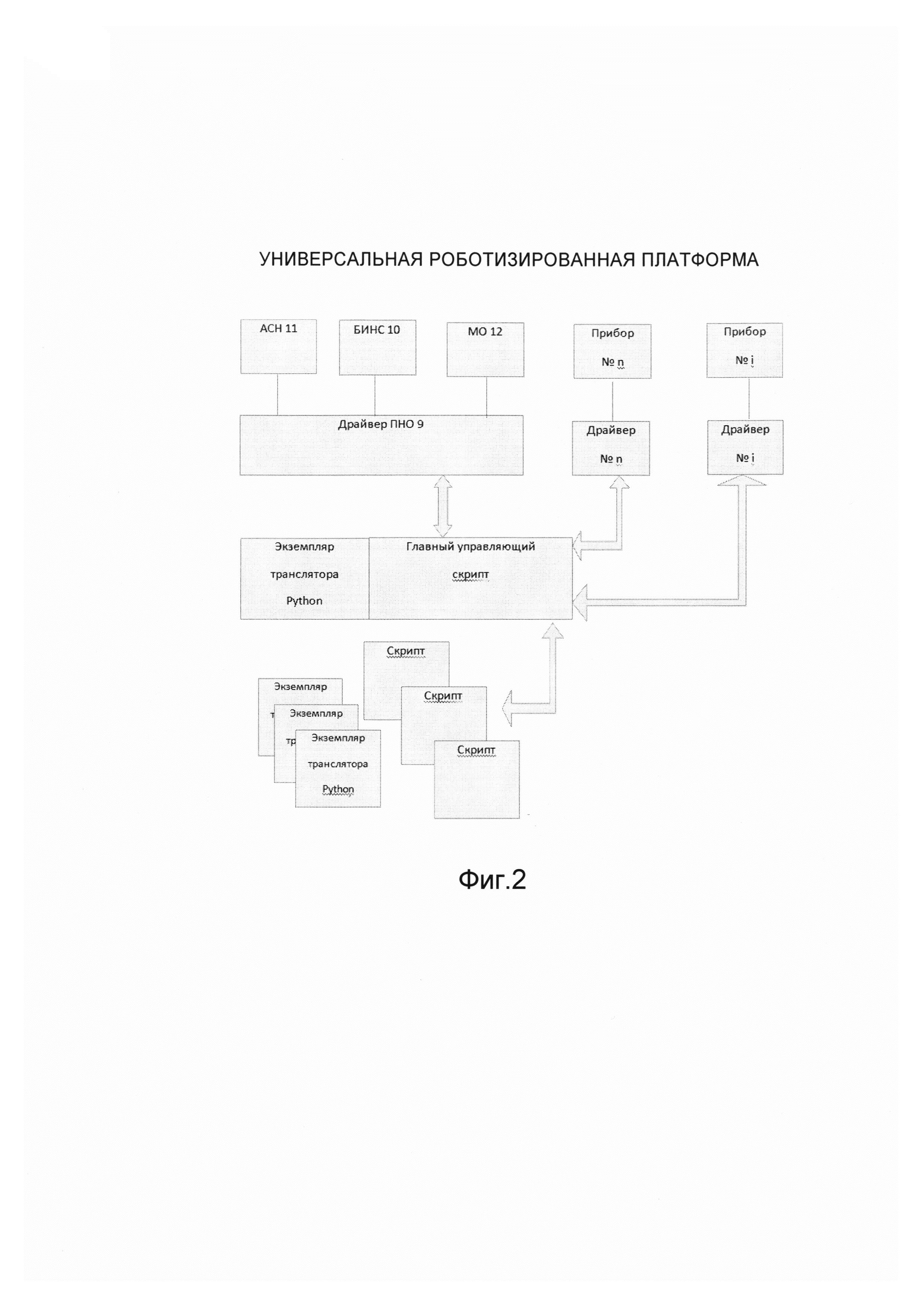
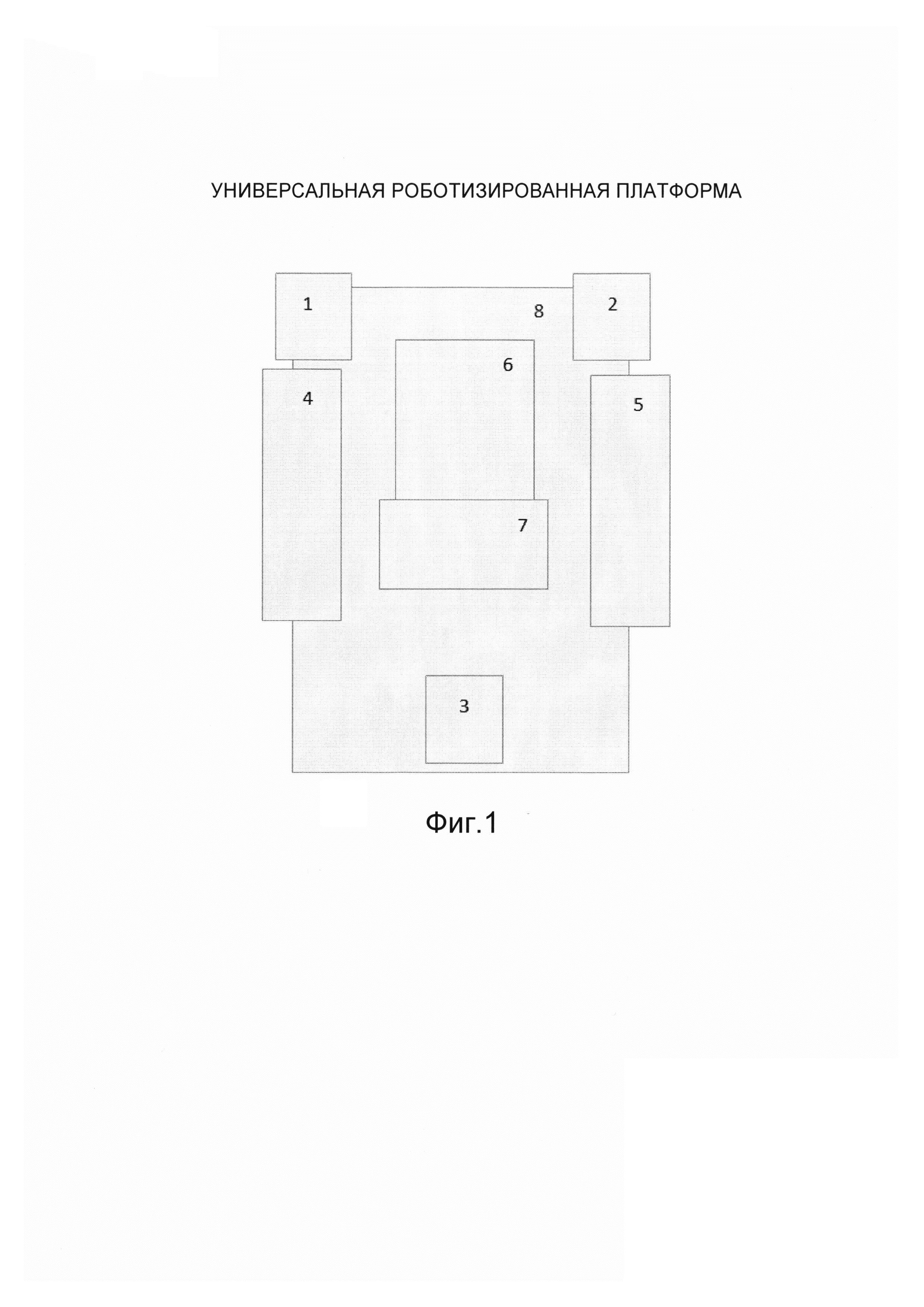
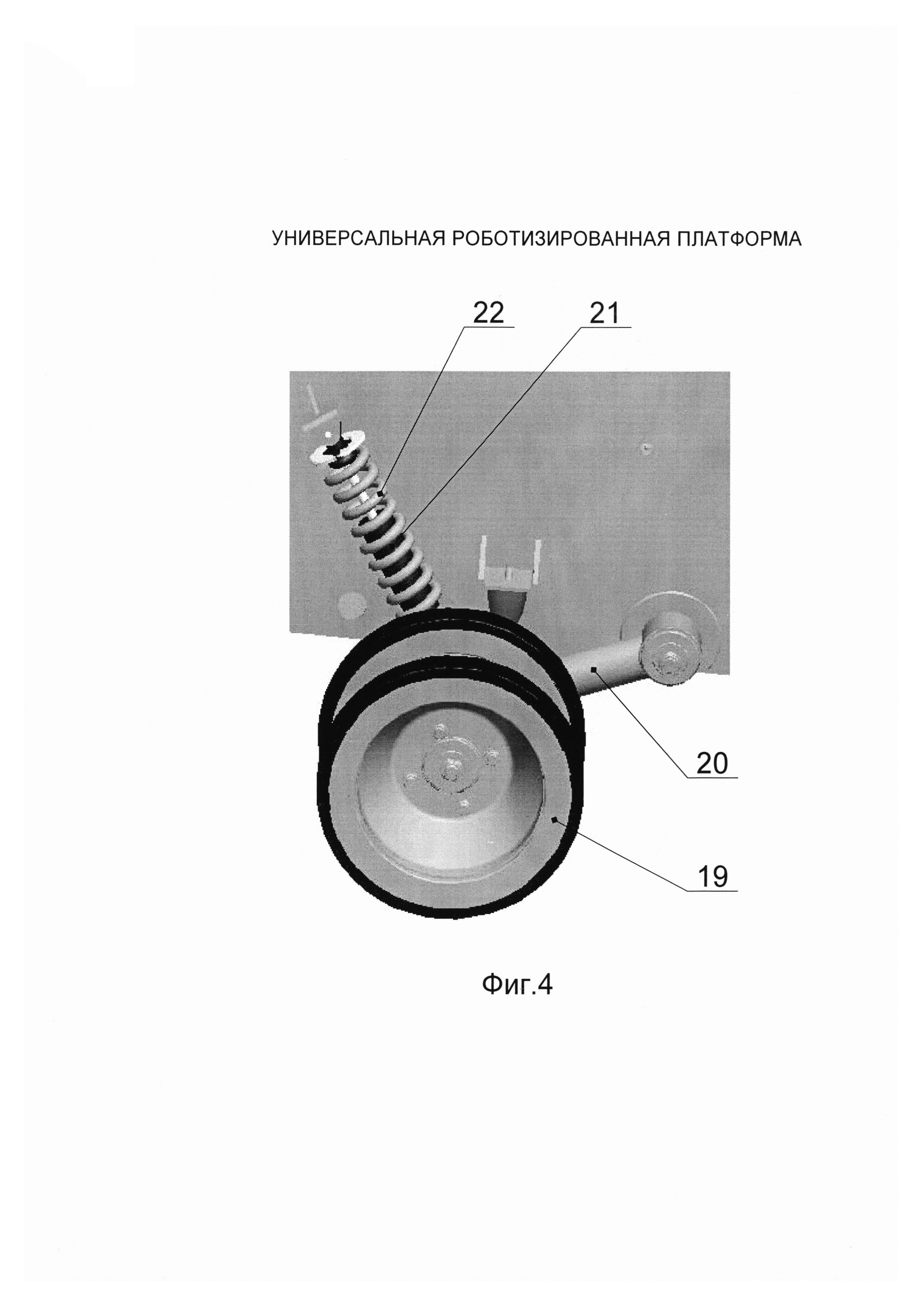
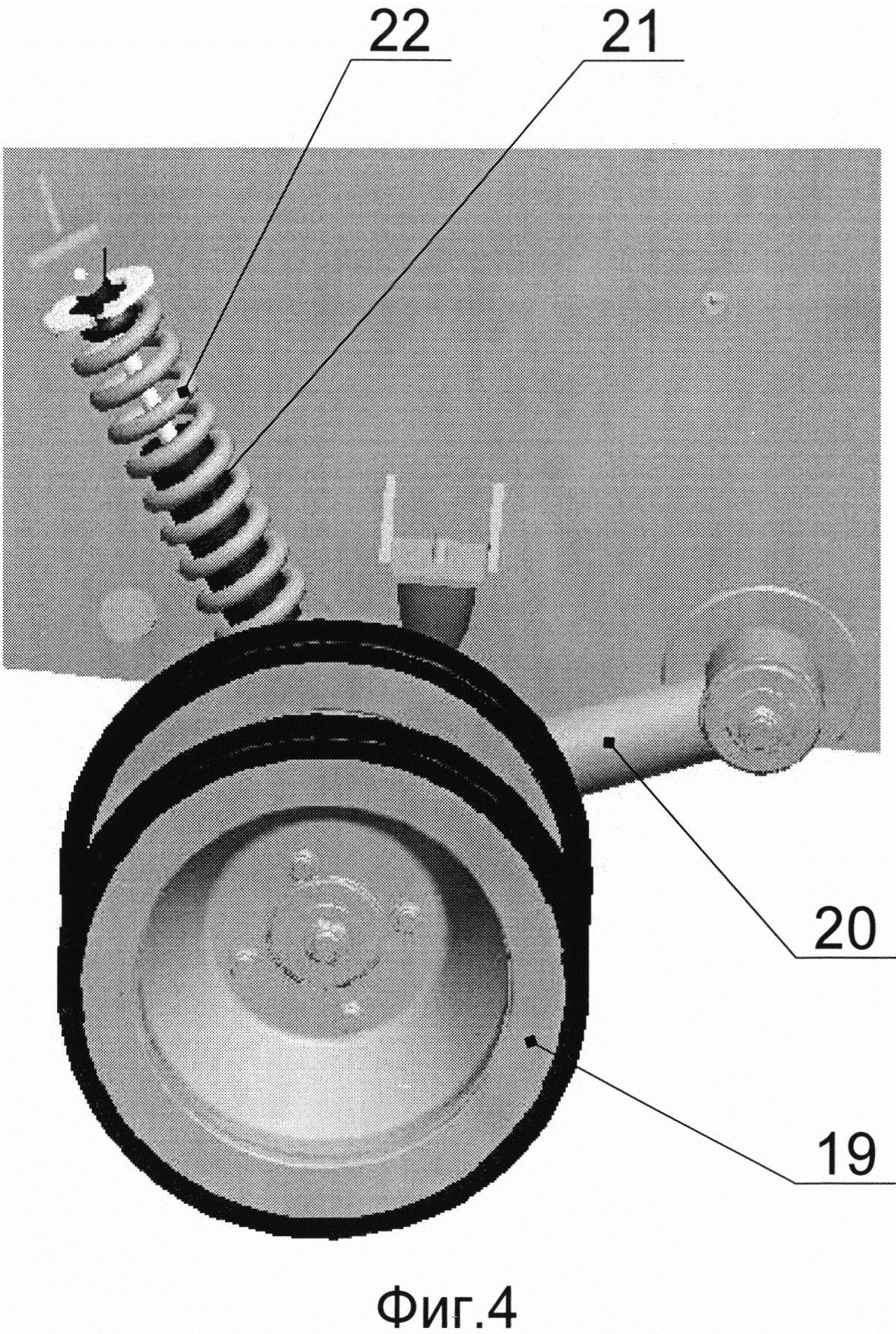
Сущность изобретения поясняется чертежами, где на фиг. 1 показан состав универсальной роботизированной платформы; на фиг. 2 - структурная схема управляющего программного обеспечения; на фиг. 3 - структурная схема рабочего места оператора платформы; на фиг. 4 - общий вид системы подвески.
Универсальная роботизированная платформа содержит ТВ-камеры переднего 1, 2 и заднего обзора 3, приводы левого 4 и правого 5 борта, систему управления платформой (СУП) 6, систему электропитания (СЭП) 7, шасси 8. Подсистема навигации и ориентирования (ПНО) 9 построена на базе бесплатформенной инерциальной навигационной системы (БИНС) 10 с подключенными к ней аппаратурой спутниковой навигации (АСН) 11 и двух механических одометров (МО) 12. Пункт дистанционного управления (ПДУ) 13 состоит из персональной ЭВМ (ПЭВМ) 14, пульта ручного управления (ПРУ) 15, приемника ТВ-сигналов (П) 16, приемо-передатчика цифрового (ППЦ) 17, станции резервного питания (СРП) 18. В системе подвески применено по четыре обрезиненных катка 19 по каждому борту. Рычаги 20 индивидуальных подвесок расположены «по ходу» платформы, газонаполненные амортизаторы 21 со спиральными пружинами 22 наклонены в противоположную сторону движения.
Универсальная роботизированная платформа функционирует следующим образом. Универсальная роботизированная платформа является носителем дополнительного оборудования - целевой нагрузки: системы вооружения, системы наблюдения и целеуказания, транспортировочного модуля, и выполняет следующие функции:
- автономное ориентирование (определение дирекционного угла);
- определение собственных координат местоположения по сигналам спутниковой навигации, режиме одометрической навигации и режиме аппаратура спутниковой навигации + одометрия;
- определение углового положения в пространстве;
- передача данных по цифровому радиоканалу о состоянии платформы (координаты, углы и т.д.);
- прием по цифровому радиоканалу команд управления от пункта дистанционного управления;
- передача по радиоканалу маскированного телевизионного сигнала от трех камер.
Спереди платформы установлены две ТВ-камеры 1 и 2, составляющие стереоскопическую пару для обеспечения возможности «скалывания» с их изображения точек с последующим расчетом их пространственных координат. На основе этих данных возможно построение 3D точечной модели наблюдаемых объектов/местности или помещения для последующего использования другими робототехническими комплексами на базе данной платформы в качестве опорной карты препятствий. Камера заднего обзора 3 - широкоугольная (120°) ТВ-камера, служащая для контроля оператором перемещения задним ходом.
Приводы левого 4 и правого 5 борта платформы представляют собой независимые электроприводы на базе бесколлекторных трехфазных двигателей с двухступенчатым редуктором, позволяющим развивать максимальную мощность во всем диапазоне скорости движения платформы. В состав приводов также входят раздельные силовые блоки управления, обеспечивающие контроль скорости вращения, токи потребления и температуру двигателя и блока управления.
Основой СУП 6 является центральное вычислительное устройство, под управлением операционной системы реального времени. Также в состав центрального вычислителя входят модули расширения интерфейсов для обеспечения взаимодействия с внешними исполнительными устройствами (например, актуаторы редукторов) и датчиками. В СУП 6 также входит ПНО 9.
ПНО 9 построена на базе БИНС 10 с подключенными к ней АСН 11 и двух МО 12 (на каждый борт). По последовательному каналу связи с центральным вычислителем производится управление режимами работы подсистемы, а также выдача координат текущего положения и углового положения платформы в пространстве (углы Эйлера).
Средства связи состоят из двух каналов: канал управления и телеметрии и канал для передачи сигнала от трех ТВ-камер 1, 2 и 3. Канал управления и телеметрии построен на базе цифровых коротковолновых приемопередатчиков, обеспечивающих скорость передачи данных до 19200 бод на расстоянии до 10 км. Канал для передачи сигнала от ТВ-камер 1, 2 и 3 состоит из устройства маскирования (например, перемежение строк, изменение параметров синхроимпульсов и т.д.) телевизионного сигнала и стандартного многоканального телевизионного передатчика, обеспечивающего дальность передачи до 5 км. Компрометация ТВ-сигнала, передаваемого платформой, потенциальным противником не приведет к последствиям, т.к. актуальность информации составляет несколько секунд (не более 10 с).
СЭП 7 состоит из дизельной станции питания и блока аккумуляторных батарей. Станция питания обеспечивает заряд батарей, с которых питание подается на приводы и подсистемы платформы. Управление подсистемой питания и прием от нее телеметрической информации осуществляется от системы управления по последовательному каналу связи.
Шасси универсальной роботизированной платформы - цельнометаллическое сварное. Движитель гусеничный с двумя опорными, одним ведущим и одним натяжным катками. Гусеница - армированная, резиновая. Опорные катки обрезиненные. За основу в универсальной роботизированной платформе принята схема независимых индивидуальных подвесок.
Универсальная роботизированная платформа по запросу ПДУ 13 передает телеметрическую информацию в соответствии с ранее установленной маской, обеспечивающей сокращение объема передаваемой информации. По отдельным подсистемам можно получить отдельным запросом детальную информацию. Запросы могут быть двух типов: телеметрия по маске, телеметрия в полном объеме. Маска представляет собой четыре байта, биты которых в зависимости от значения разрешают или запрещают передачу соответствующего им поля данных. В начале каждого пакета телеметрии, передаваемого по маске, выдается наличие аварийных ситуации подсистем и приборов. Телеметрия в полном объеме:
- геодезические координаты местоположения - В, L, Н;
- углы Эйлера положения платформы в градусах, минутах, секундах;
- состояние ТВ-камер 1, 2 и 3 - включена/выключена, частота канала, тип кодирования;
- состояние аккумуляторных батарей - напряжение, перегрузки (да/нет), перегрев;
- состояние СЭП 7 - топливо, напряжение, ток, отказы (да/нет);
- электроприводы - температура блока управления, температура двигателя, отказы (да/нет);
- внешняя обстановка - наличие препятствий, их расположение, застревание шасси.
Для управляющего ПО использованы следующие языки программирования и трансляторы: GCC (компилятор языка С), Python 3.x.
Программное обеспечение платформы состоит из двух уровней: уровень обеспечения сопряжения с аппаратными средствами (драйверы) и прикладной уровень. Драйвера устройств (на фиг. 2 раскрыт драйвер ПНО 9) обеспечивают сопряжение прикладного (управляющего) уровня программного обеспечения с аппаратными средствами платформы, выполняя при этом первичную обработку информации. На примере ПНО 9 - это получение данных от трех источников навигационной информации: БИНС 10, АСН 11 и МО 12 и формирование в зависимости от текущих настроек данных для прикладного уровня программного обеспечения. Такая структура позволяет на прикладном уровне абстрагироваться от аппаратных протоколов обмена с приборами и подсистемами, получая от драйвера уже обработанные «чистые» данные. Драйверы устройств могут быть встроенными в операционную систему либо быть разработаны. Прикладной уровень программного обеспечения построен в виде иерархии скриптов отдельных подзадач - главный управляющий скрипт распределяет потоки данных от драйверов устройств частным целевым скриптам. Такая структура построения позволяет сделать управляющее программное обеспечение, имеющее максимальную ценность, платформенно независимым, доступным для корректировки и имеющим максимально возможный срок актуальности, т.к. замена аппаратных вычислительных средств не влечет изменения данного программного обеспечения.
Универсальная роботизированная платформа может находится в следующих режимах: ВЫКЛЮЧЕНА, ВКЛЮЧЕНА и ожидает команды (ОЖИДАНИЕ): работа от аккумуляторных батарей или работа от СРП 18 через батареи, ВЫПОЛНЕНИЕ КОМАНДЫ УПРАВЛЕНИЯ.
Исходными данными для алгоритма управления движением являются: текущие координаты местоположения (спутниковая навигация, одометрическая навигация), текущее угловое положение платформы в пространстве, текущие скорости движения (общий вектор, скаляры правого и левого борта), заданные точки маршрута, разворот, параметры маршрута (кривизна, допуск и т.д.), команда пауза/старт.
Выходные данные алгоритма: сигналы акселератора на правый и левый борт, направление движения левого и правого борта, сигналы торможения двигателей, управление редукторами бортов, программный сигнал завершения движения.
На основании исходных данных алгоритм управления движением формирует управляющие сигналы на подсистемы движителя платформы, обеспечивая ее движение по заданному маршруту. Отдельными видами сигналов из перечисленных являются: команда пауза/старт, программный сигнал завершения движения.
Команда пауза/старт используется для адаптивного управления движением в зависимости от внешних условий. Источником данного сигнала может быть оператор или внешний алгоритм (например, алгоритм детектирования препятствия), при этом в зависимости от оценки внешней обстановки возможна отмена текущего маршрута и назначение нового.
Программный сигнал завершения движения формируется при достижении платформой конечной точки маршрута с заданной точностью. Маршрут, как правило, задается набором последовательных точек, через которые должна пройти платформа. Одними из важных параметров маршрута являются допуск и тип аппроксимации. Так как подсистема навигации имеет конечную точность, необходимо вводить допуск на прохождение контрольных точек маршрута. Тип аппроксимации маршрута зависит от обстановки на местности и ее типа (поле, дорога, город и т.д.) и в конечном итоге влияет на скорость прохождения маршрута. Аппроксимация маршрута может быть кусочно-линейной и квадратичной. Квадратичная аппроксимация позволяет проходить контрольные точки на максимально возможной скорости (в зависимости от кривизны), при кусочно-линейной аппроксимации для прохождения контрольных точек необходимо снижение скорости движения до минимальной. Выбор типа аппроксимации зависит от многих условий и выбирается оператором исходя из основных критериев: точность следования по маршруту, скорость прохождения маршрута.
Алгоритм выработки рассогласования бортов по скорости реализуется следующим способом. При использовании гусеничного движителя единственным методом поворота платформы является метод различия скоростей движения бортов платформы. Таким образом, для разворота в нужную сторону вводится разница скорости вращения силовых установок. В зависимости от типа задания маршрута могут использоваться два алгоритма: движение по кусочно-линейному маршруту, движение по гладкой траектории (квадратичная аппроксимация). В данном виде движения разделяют два типа движения: по прямой линии от точки к точке, поворот на угол в узлах.
Движение по прямой линии обеспечивается алгоритмом коррекции угла (отклонение от прямой) путем ввода рассогласования скорости движения бортов. Значение рассогласования ранжировано в зависимости от ошибки по углу:
- менее 10°. Без изменения значения скорости движения, путем ввода рассогласования бортов. Рассогласование скорости не более 5%, зависимость линейная;
- более 10° менее 30°. Уменьшение скорости движения платформы до 25% от максимальной, ввод рассогласования скорости бортов. Рассогласование скорости не более 10%, зависимость линейная. При возникновении нештатной ситуации (съезд с прямой линии на расстояние более 5 метров) алгоритм движения останавливается, вводится дополнительная промежуточная точка, расположенная на прямой движения, и осуществляется движение до этой точки с продолжением алгоритма от нее. Поворот на заданный угол в узлах (точках) маршрута осуществляется путем остановки платформы по достижении заданной точки и вращением бортов в противоположном направлении до достижения необходимого угла.
Движение по гладкой траектории (квадратичная аппроксимация) в силу примененного метода аппроксимации позволяет осуществлять плавное движение по траектории без остановок, кроме случаев острых углов, на максимально возможной скорости. Управление осуществляется путем рассогласования бортов платформы в зависимости от рассчитанной в каждой точке траектории кривизны (угол поворота). Снижение скорости движения зависит от кривизны и имеет ступенчатую функции, т.е. скорость разделена на диапазоны 100, 50, 5% в зависимости от угла кривизны от 0° до 20°, от 20° до 80° и от 80° и больше соответственно проценту скорости. При возникновении нештатной ситуации (отклонение от маршрута более 5 метров) алгоритм движения останавливается, вводится дополнительная промежуточная точка, расположенная на маршруте движения, и осуществляется движение до этой точки с продолжением алгоритма от нее.
Общим для обоих алгоритмов является снижение скорости движения в зависимости от расстояния между опорными точками маршрута, т.е. при расстоянии между точками менее 20 м происходит линейное уменьшение скорости движения до 5% от максимальной включительно, при этом подразумевается, что расстояние между точками не может быть менее 2 м.
ПДУ 13 состоит из двух рабочих мест оператора: оператора универсальной подвижной платформы, оператора/стрелка разведки/вооружения.
Основными функциями оператора универсальной роботизированной платформы состоят в обеспечении доставки платформы в указанную точку, контроль движения платформы, контроль за состоянием приборов и подсистем платформы. Рабочее место представляет собой ПЭВМ 14 со средствами отображения, средства связи с платформой, ПРУ 15 движением платформы. На ПЭВМ 14 отображаются все параметры состояния платформы, видеоинформация с ТВ-камер 1, 2 и 3, цифровая карта местности, совместимая с ГИС «Интеграция», органы управления подсистемами платформы.
Средства связи построены в виде отдельной подсистемы и связаны с ПЭВМ 14 последовательным каналом связи.
ПРУ 15 обеспечивает оператору возможность ручного управления движением платформы. ПРУ 15 имеет возможность непосредственного кабельного подключения к платформе для выполнения технологических/регламентных работ с платформой без разворачивания ПДУ 14.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании универсальной роботизированной платформы, обеспечивающей установку дополнительного оборудования - целевой нагрузки: систем вооружения различных типов, средств разведки и целеуказания и транспортировочного оборудования, высокую управляемость в реальных климатических условиях, автономное ориентирование, определение собственных координат местоположения по сигналам спутниковой навигации в режиме одометрической навигации и в комплексированном режиме, определение углового положения в пространстве, передачу данных по цифровому радиоканалу о состоянии платформы, прием по цифровому радиоканалу команд управления от пункта дистанционного управления, передачу по радиоканалу маскированного телевизионного сигнала от ТВ-камер.
Универсальная роботизированная платформа, содержащая бронированное гусеничное шасси с приводом, системой независимых индивидуальных подвесок и системой управления, оснащенной системой топопривязки и ориентирования, средства связи, пункт дистанционного управления и систему электропитания, систему предупреждения столкновений, пункт дистанционного управления, отличающаяся тем, что в состав универсальной роботизированной платформы включены две ТВ-камеры переднего обзора, составляющие стереоскопическую пару, и одна ТВ-камера заднего обзора, приводы левого и правого бортов платформы выполнены в виде независимых электроприводов на базе бесколлекторных трехфазных двигателей с редуктором и раздельными силовыми блоками управления, система независимых индивидуальных подвесок состоит из четырех обрезиненных катков по каждому борту, рычаги подвесок расположены «по ходу» платформы, газонаполненные амортизаторы со спиральными пружинами наклонены в противоположную сторону движения, средства связи состоят из двух каналов: канала управления и телеметрии, построенного на базе цифровых коротковолновых приемопередатчиков, и канала для передачи сигнала от трех ТВ-камер, состоящего из устройства маскирования телевизионного сигнала и многоканального телевизионного передатчика, телеметрические данные, передаваемые от платформы, представляются по запросу двух типов: телеметрия по маске или телеметрия в полном объеме, программное обеспечение платформы состоит из двух уровней: уровень обеспечения сопряжения с аппаратными средствами и прикладной уровень, алгоритм управления движением при наличии следующих исходных данных: текущие координаты местоположения, текущее угловое положение платформы в пространстве, текущие скорости движения, заданные точки маршрута, разворот, параметры маршрута и команда пауза/старт, выполнен с возможностью получения следующих выходных данных: сигналы акселератора на правый и левый борта, направление движения левого и правого бортов, сигналы торможения двигателей, управление редукторами бортов и программный сигнал завершения движения, алгоритм выработки рассогласования бортов по скорости в зависимости от типа задания маршрута выполнен с возможностью реализации одним из двух способов: движение по кусочно-линейному маршруту или движение по гладкой траектории, пункт дистанционного управления состоит из двух рабочих мест: оператора универсальной роботизированной платформы и оператора, управляющего целевой нагрузкой, рабочее место оператора платформы, оснащенное персональной ЭВМ со средствами отображения, средствами связи с платформой, пультом управления движением платформы, обеспечивает доставку платформы в указанную точку, контроль движения платформы, контроль за состоянием приборов и подсистем платформы.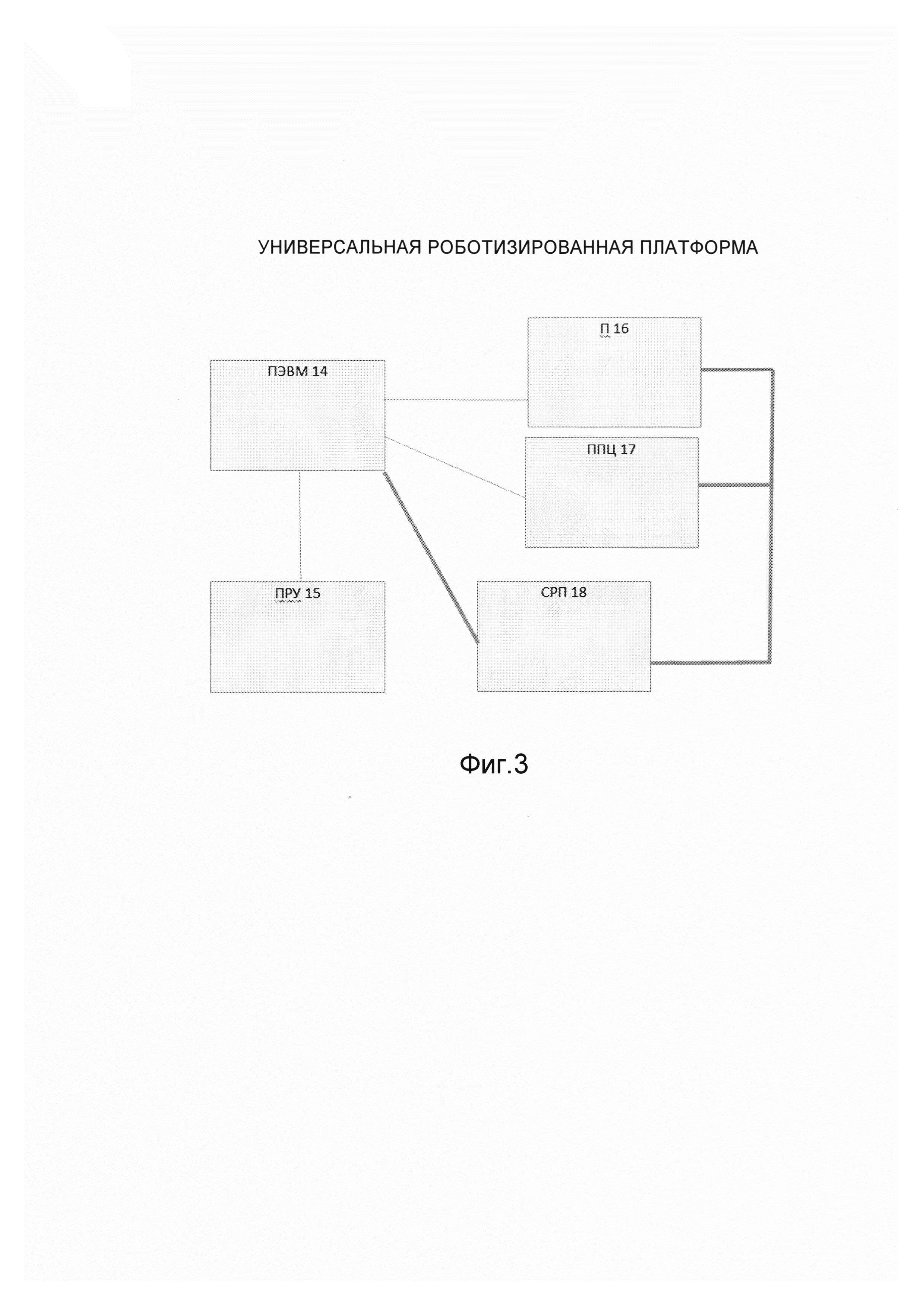
Система информационного обмена топопривязчика
Способ функционирования топопривязчика в режиме контрольно-корректирующей станции
Стенд для закалки валов и трубных деталей
Подвижные части автоматического стрелкового оружия
Ствольное оружие
Диоптрический прицел
Способ автоматизированного формирования локальных геодезических сетей высокого класса точности
Устройство для обработки текучим абразивом отверстий длинномерных деталей
Набор металлических каркасных конструкций для создания транспортной мебели
Учебно-тренировочный комплект для обучения операторов переносных зенитных ракетных комплексов
Система информационного обмена топопривязчика
Способ функционирования топопривязчика в режиме контрольно-корректирующей станции
Стенд для закалки валов и трубных деталей
Подвижные части автоматического стрелкового оружия
Ствольное оружие
Диоптрический прицел
Способ автоматизированного формирования локальных геодезических сетей высокого класса точности
Устройство для обработки текучим абразивом отверстий длинномерных деталей
Набор металлических каркасных конструкций для создания транспортной мебели
Учебно-тренировочный комплект для обучения операторов переносных зенитных ракетных комплексов

