Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ВВОДОМ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ПОСРЕДСТВОМ ТРЕХМЕРНОЙ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ
Вид РИД
Изобретение
Настоящее изобретение относится к инвазивной процедуре с управлением по ультразвуковым изображениям и, в частности, к инвазивной процедуре с управлением посредством трехмерной ультразвуковой визуализации.
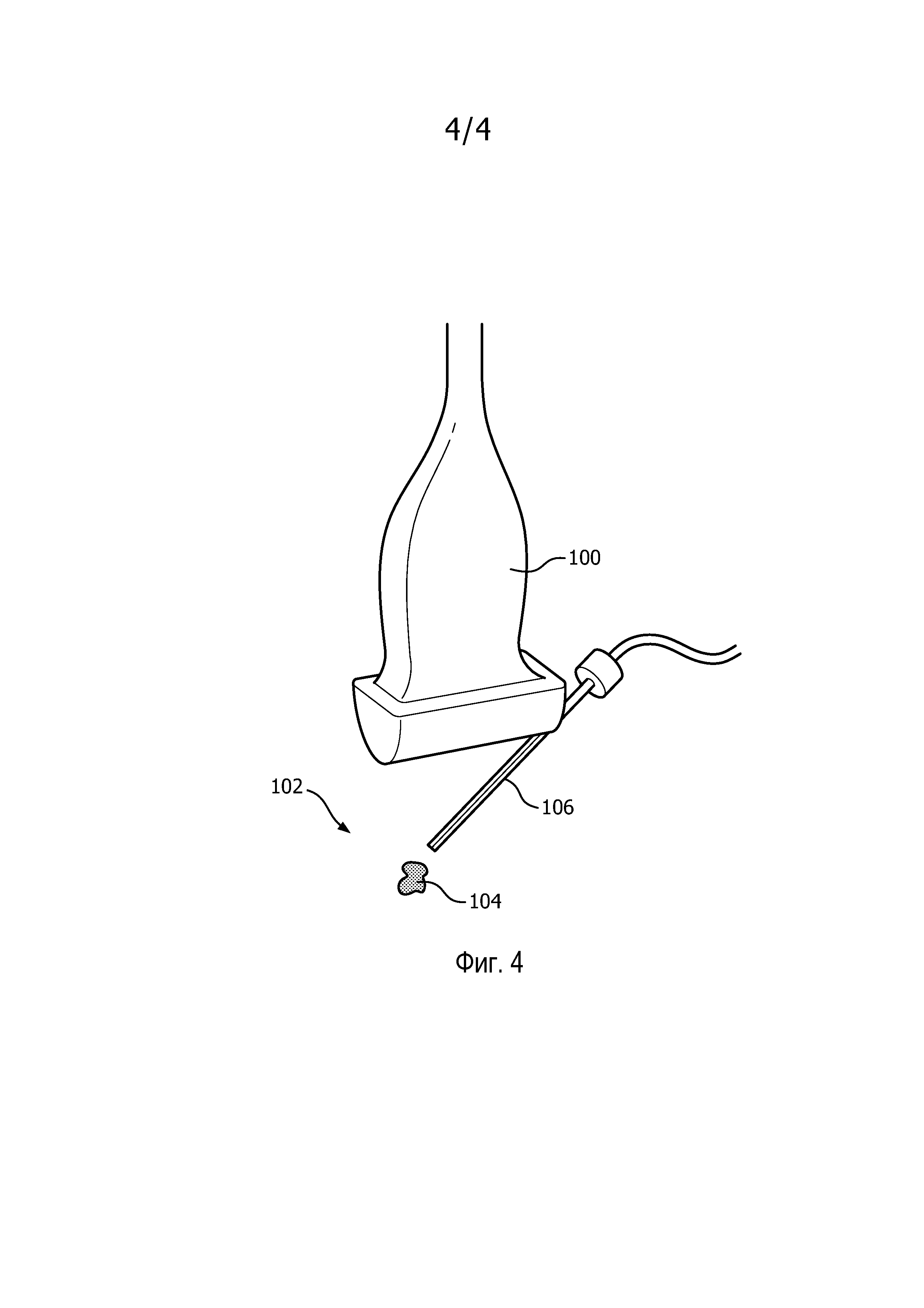
Многими хирургическими инвазивными процедурами можно управлять методом ультразвуковой визуализации, который отображает внутреннюю область ткани, которая является объектом инвазивной процедуры. Преобладающими среди упомянутых процедур являются процедуры, требующие наведения и прицеливания иглы, например процедуры биопсии наблюдаемых скоплений в молочной железе и введения региональной анестезии. В ходе упомянутых процедур, ультразвуковым методом можно визуализировать целевую ткань, а также проследить траекторию иглы по мере того, как игла проходит сквозь ткань к целевой ткани. Для выполнения упомянутых процедур разработано множество систем и устройств для ультразвуковой визуализации. Когда применяют двумерную (2-мерную) ультразвуковую визуализацию, важно удерживать иглу в положении, совмещенном с плоскостью изображения. Данное требование поясняется Фиг.4, на которой показан ультразвуковой датчик 100, который сканирует плоскость 102 2-мерного изображения. Датчик располагают так, чтобы целевая ткань 104 была видна на изображении. Игла 106, осуществляющая доступ к целевой ткани 104, должна непрерывно продвигаться в плоскости 102 изображения. Если игла выходит из плоскости изображения, то больше невозможно визуализировать и наблюдать, как игла подходит к целевой ткани. Промышленно выпускаются направляющие для биопсии для многих ультразвуковых датчиков, которые позволяют вводить иглу в тело только в плоскости ультразвукового изображения. Другой метод выполнения упомянутого требования описан в патенте US 5158088 (Nelson и др.). В системе авторов Nelson и др., на острие стилета интродуктора расположен преобразователь, передающий сигнал, который принимается датчиком для ультразвуковой визуализации. Упомянутый сигнал принимается датчиком и служит для создания звукового сигнала, когда острие стилета достигает плоскости изображения и затем пересекает упомянутую плоскость. Сигналы, получаемые преобразователем на стилете, можно использовать для идентификации острия стилета на 2-мерном ультразвуковом изображении. Другой метод 2-мерной визуализации описан в патенте US 5095910 (Powers). Система автора Powers вызывает вибрации стилета, и данное вибрационное движение обнаруживается методами ультразвукового Доплера. Сигнал цветового доплеровского на ультразвуковом изображении указывает местоположение острия стилета. Однако для обнаружения и визуализации доплеровским методом стилет должен находиться в плоскости изображения.
Трехмерная (3-мерная) ультразвуковая визуализация продемонстрировала свою пригодность для разрешения проблемы совмещения с плоскостью 2-мерного изображения. Поскольку метод 3-мерной визуализации формирует изображения объема ткани, а не только одной плоскости, то ограничение необходимостью совмещения с одной плоскостью устраняется. Однако многие врачи не знакомы с методом 3-мерной ультразвуковой визуализации или с представлением анатомических структур в 3-мерных ультразвуковых изображениях. Кроме того, окружающая ткань может загораживать целевую ткань, иглу в изображаемом объеме или то и другое. В патенте US 7529393 (Peszynski и др.) предложено несколько подходов к преодолению упомянутых затруднений, в т.ч. отображение острия иглы с большей плотностью отображаемых линий, отображение острия иглы в меньшем подобъеме, а также объединение как 2-мерной, так и 3-мерной визуализации на одном дисплее. Другой способ применения 3-мерной визуализации состоит в отображении трех взаимно ортогональных плоскостей изображения, которые сходятся на острие хирургического инструмента, как поясняется в патенте US 6572547 (Miller и др.) и патентной публикации US 2010/0121190. Третий подход описан в применении к компьютерной томографии и компьютерной томографической флюороскопии (КТ-флюороскопии) в патентной публикации US 2007/0100234 (Arenson и др.). В системе авторов Arenson и др., веерный пучок рентгеновского излучения проецируется на нескольких рядах детекторных элементов. Каждый ряд детекторов служит для реконструкции изображения, и все ряды служат для многослойной визуализации методом КТ-флюороскопии. Когда игла проходит сквозь ткань, отображаемую в виде нескольких слоев, иглу обнаруживают в каждом изображении, и несколько изображений объединяют для формирования составного толстослойного изображения, представляющего все сегменты иглы во всех объединенных изображениях слоев. Однако стол для пациента или гентри требуется постоянно регулировать, чтобы выдерживать целевую ткань на одной линии между рентгеновским источником и детекторами. Кроме того, флюороскопия подвергает пациента и оператора воздействию ионизирующего излучения. Соответственно, требуется обеспечить ультразвуковой метод для направления хирургического инструмента с исключением воздействия ионизирующего излучения. Для ультразвукового метода дополнительно требуется устранить проблему необходимости совмещения плоскости изображения и иглы, которая характерна для предшествующего уровня техники, и обеспечить систему, которая проста для применения и легко осваивается специалистами, не достаточно хорошо знакомыми с 3-мерной ультразвуковой визуализацией.
В соответствии с принципами настоящего изобретения предлагаются система и способ ультразвуковой визуализации для направления инвазивного инструмента, например, хирургической иглы, к целевой ткани в теле. В системе применен датчик с двумерной матрицей преобразовательных элементов, которая электронным методом направляет пучки в трех измерениях для сканирования объемной области тела в реальном времени. 2-мерным матричным датчиком можно легко манипулировать для получения изображений целевой ткани и траектории, проходимой инвазивным инструментом для достижения целевой ткани, и для оптимизации угла падения между ультразвуковыми пучками и инструментом. Эхо-сигналы, полученные с трех направлений из ткани, обрабатываются устройством мультипланарного переформатирования для получения множества пространственно смежных плоскостей 2-мерных изображений. Изображения пространственно смежных плоскостей одновременно отображаются в последовательности порядка их пространственного расположения в ткани и непрерывно обновляются в реальном масштабе времени. По мере того, как инвазивное устройство продвигается к целевой ткани, его прохождение можно отслеживать от одной плоскости изображения до следующей, и порядок пространственного расположения изображений дает врачу интуитивное ощущение прогресса в продвижении инструмента. Смежные изображения могут частично совпадать одно с другим в направлении толщины таким образом, что иглу можно видеть одновременно в упомянутых смежных изображениях, и ход введения иглы отслеживать удобнее.
На чертежах:
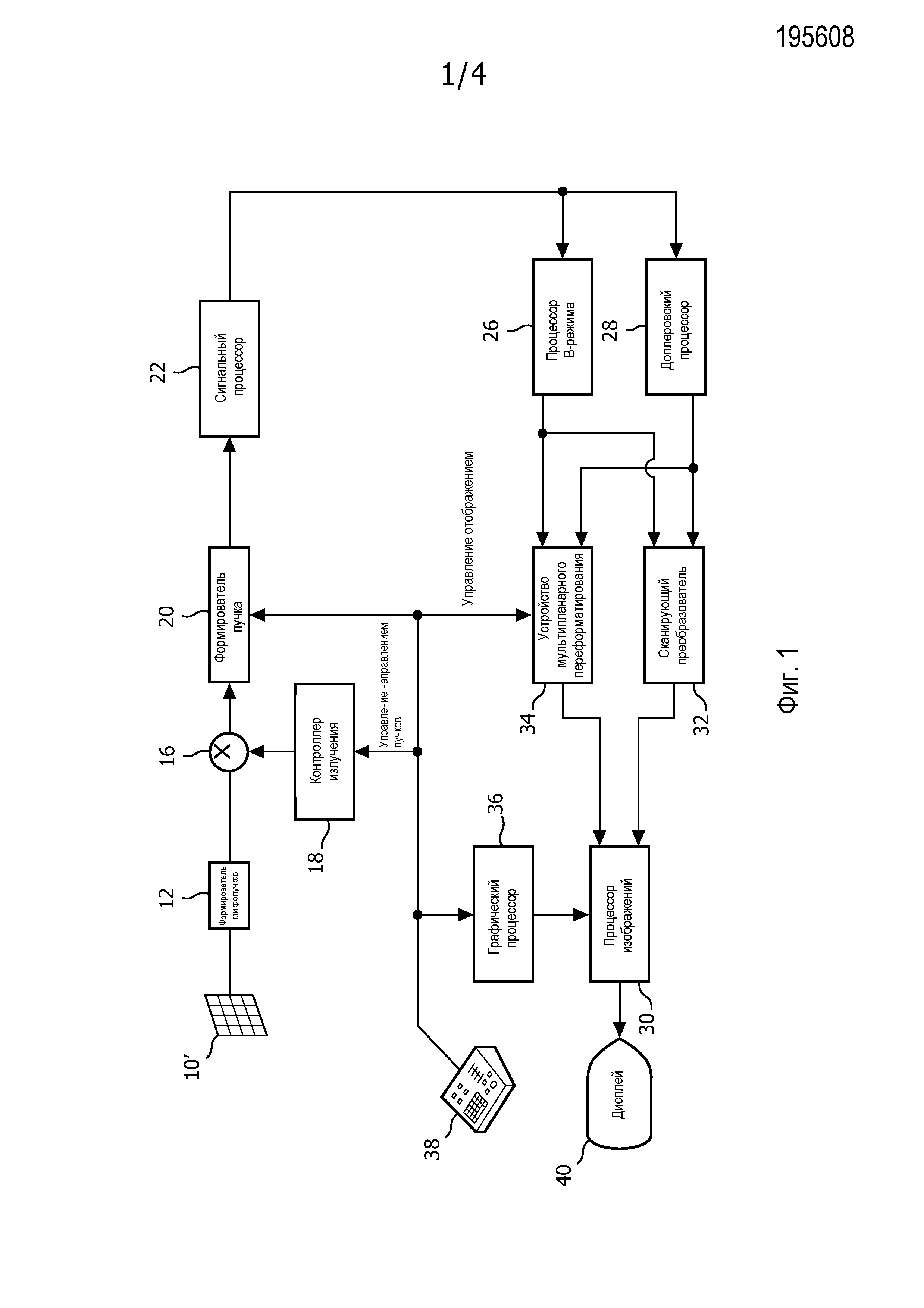
Фиг. 1 - блок-схема диагностической системы ультразвуковой визуализации, построенной в соответствии с принципами настоящего изобретения;
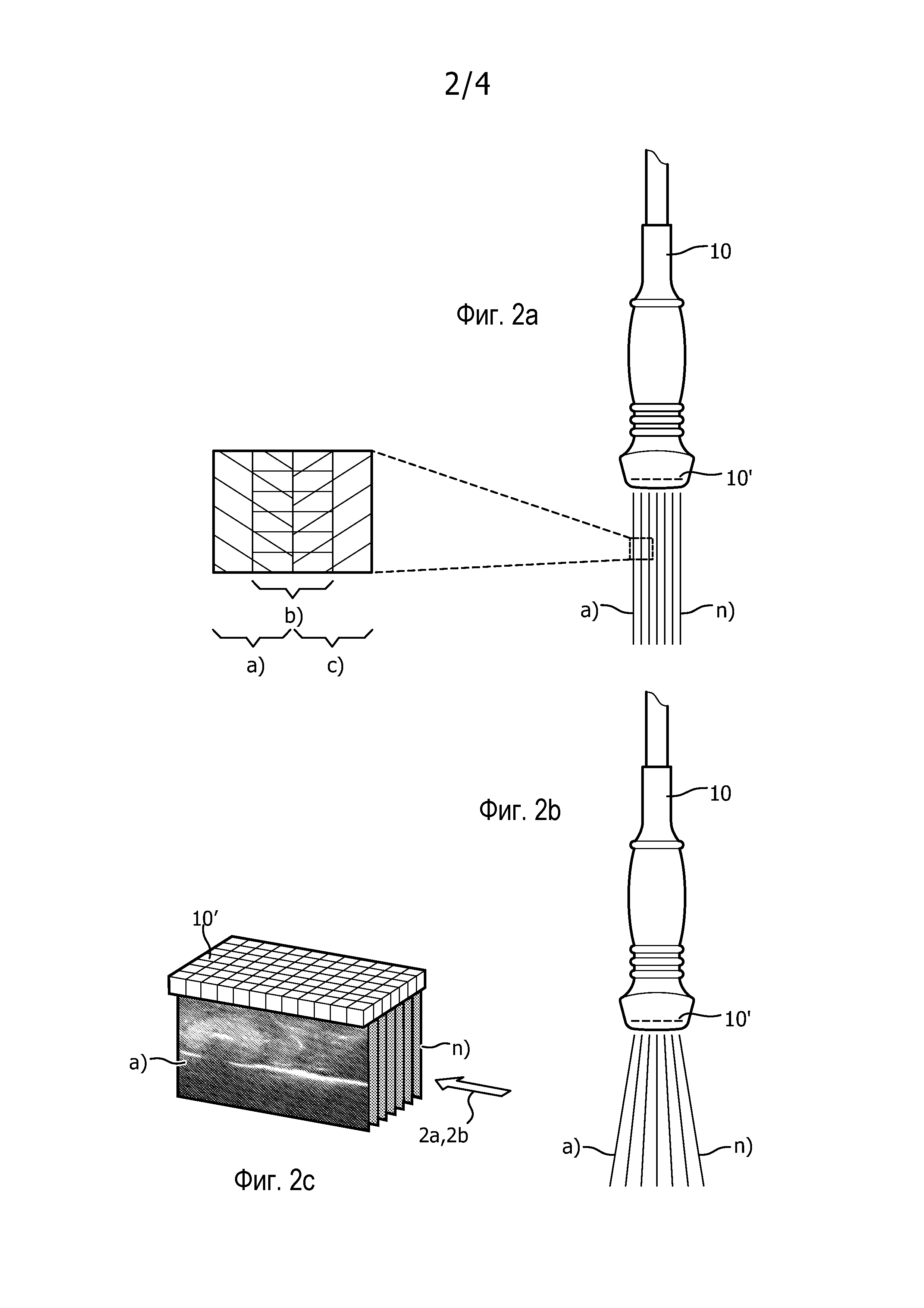
Фиг. 2а и 2b - разные ориентации плоскостей, которые могут быть созданы ультразвуковым датчиком в соответствии с настоящим изобретением, и частично совпадающие толстослойные плоскости изображений;
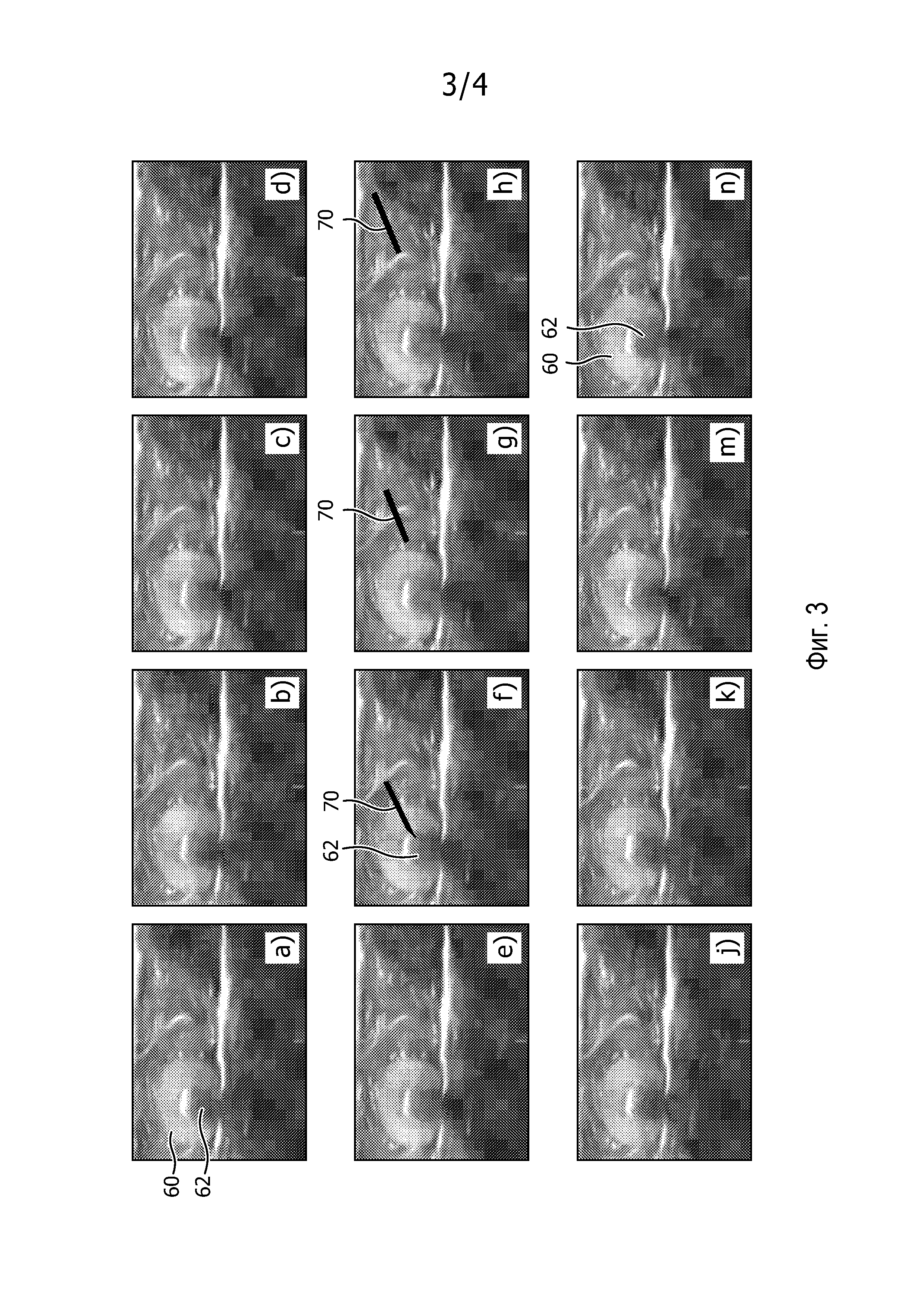
Фиг. 3 - последовательное отображение пространственно смежных плоскостей изображения иглы в ткани в соответствии с принципами настоящего изобретения;
Фиг. 4 - введение иглы в плоскости двумерного изображения ультразвукового датчика.
Первоначально со ссылкой на Фиг. 1 представлена блок-схема диагностической системы ультразвуковой визуализации, построенной в соответствии с принципами настоящего изобретения. Как видно из Фиг.1, в ультразвуковом датчике 10 обеспечен матричный преобразователь 10’ для излучения ультразвуковых волн и приема эхо-информации. Матричный преобразователь 10’ представляет собой двумерную матрицу преобразовательных элементов, способную сканировать в трех измерениях для 3-мерной визуализации. Матричный преобразователь связан с формирователем 12 микропучков в датчике, который управляет излучением и приемом сигналов элементами матрицы. Формирователи микропучков способны, по меньшей мере частично, формировать пучки из сигналов, получаемых группами или «участками» преобразовательных элементов, как поясняется в патентах США №№ 5997479 (Savord и др.), 6013032 (Savord) и 6623432 (Powers и др.). Формирователь микропучков соединен кабелем датчика с переключателем 16 излучения/приема (T/R), который переключает между режимами излучения и приема и защищает основной формирователь 20 пучка от высокоэнергетических излучаемых сигналов. Излучение ультразвуковых пучков из матричного преобразователя 10 под управлением формирователя 12 микропучков направляется контроллером 18 излучения, соединенным с переключателем излучения/приема (T/R) и формирователем 20 пучка, который получает данные ввода, при выполнении операции пользователя на интерфейсе пользователя или панели 38 управления. Одной из функций, исполняемых под управлением контроллера излучения, является направление, в котором направляются пучки. Пучки могут быть направлены прямо вперед (ортогонально) от матричного преобразователя или под разными углами для расширения поля обзора, как поясняется ниже.
Сигналы, обработанные методом формирования частичных пучков в формирователе 12 микропучков, подаются в основной формирователь 20 пучка, в котором сигналы, обработанные методом формирования частичных пучков, из отдельных участков элементов объединяются в сигнал, обработанный методом формирования полного пучка. Например, основной формирователь 20 пучка может содержать 128 каналов, каждый из которых получает сигнал, обработанный методом формирования частичных пучков, от участка из 12 преобразовательных элементов. При этом сигналы, полученные более чем 1500 преобразовательными элементами двумерной матрицы, могут обеспечивать эффективный вклад в один сигнал, обработанный методом формирования пучка.
Сигналы, обработанные методом формирования пучка, подаются в сигнальный процессор 22. Сигнальный процессор 22 может обрабатывать полученные эхо-сигналы различным образом, например полосовой фильтрацией, прореживанием, разделением на I и Q составляющие, а также выделением гармонических сигналов, которое выполняет функцию разделения линейных и нелинейных сигналов, чтобы допускать идентификацию нелинейных эхо-сигналов, отраженных от ткани и микропузырьков. Сигнальный процессор может также выполнять дополнительное увеличение отношение сигнал-шум, например, удаление спеклов, смешение сигналов и подавление шумов.
Обработанные сигналы подаются в процессор 26 B-режима и доплеровский процессор 28. Процессор 26 B-режима использует амплитудное детектирование для визуализации таких структур в теле, как нормальная ткань, кисты, нервные волокна и клетки крови. Изображения структуры тела в B-режиме могут быть сформированы либо в режиме гармоники, либо в основном режиме, либо в режиме, сочетающем оба упомянутых режима, как поясняется в патентах США №№ 6283919 (Roundhill и др.) и 6458083 (Jago и др.). Доплеровский процессор обрабатывает различные по времени сигналы от ткани и кровотока для обнаружения движения веществ, например, потока клеток крови в поле изображения. Сигналы структур и движения, формируемые упомянутыми процессорами, подаются в сканирующий преобразователь 32 и устройство 34 мультипланарного переформатирования, которые формируют данные изображения структуры ткани, потока или комбинированное изображение с обеими характеристиками. Сканирующий преобразователь будет преобразовывать эхо-сигналы с полярными координатами в сигналы изображения требуемого формата изображения, например, секторного изображения в прямоугольных координатах. Устройство мультипланарного переформатирования будет преобразовывать эхо-сигналы, которые приняты из точек в общей плоскости в объемной области тела, в ультразвуковое изображение упомянутой плоскости, как поясняется в патенте США № 6443896 (Detmer). Возможно также применение блока объемной визуализации (не показанного) для преобразования эхо-сигналов набора 3-мерных данных в проектируемое 3-мерное изображение, наблюдаемое из данной базовой точки, как поясняется в патенте США № 6530885 (Entrekin и др.). Из сканирующего преобразователя, устройства мультипланарного переформатирования и блока объемной визуализации (в случае применения) выводятся 2-мерные или 3-мерные изображения в процессор 30 изображений для дальнейшего улучшения, буферизации и временного хранения для отображения на дисплее 40 изображений.
С процессором 30 изображений связан также графический процессор 36, который формирует накладные графические элементы для показа на ультразвуковых изображениях. Данные накладные графические элементы могут содержать стандартную идентифицирующую информацию, например имя пациента, дату и время получения изображения, параметры визуализации и т.п. С этой целью графический процессор получает данные ввода из пользовательского интерфейса 38, например имя пациента, введенное на клавиатуре. Пользовательский интерфейс связан также с контроллером 18 излучения, управляющим генерацией ультразвуковых сигналов матричным преобразователем 10’ и, следовательно, изображениями, создаваемыми матричным преобразователем и ультразвуковой системой. Пользовательский интерфейс связан также с устройством 34 мультипланарного переформатирования для выбора нескольких мультипланарно переформатированных (MPR) изображений и их отображения в соответствии с настоящим изобретением, как поясняется ниже.
В соответствии с принципами настоящего изобретения датчик 10 сканирует объемную область перед двумерным матричным преобразователем, и эхо-сигналы, полученные в результате сканирования упомянутого 3-мерного объема, организуются в изображения пространственно ориентированных плоскостей 2-мерных изображений, как показано на Фиг.2a-2c. Упомянутая пространственная ориентация относительно двумерного матричного преобразователя 10’ показана на Фиг.2c. На данном чертеже видно, что объем перед (под на приведенной иллюстрации) двумерным матричным преобразователем 10’ сканируется пучками ультразвука, и эхо-сигналы, принятые в ответ на излучение пучка, организуются для формирования 2-мерных изображений последовательности смежных плоскостей изображений, обозначенных как a)-n). В приведенном примере устройство 34 мультипланарного переформатирования сформатировало пространственную последовательность параллельных непересекающихся плоскостей. Упомянутые плоскости изображений a)-n) показаны «с торца» (ортогонально относительно плоскости чертежа) на Фиг.2a, при наблюдении в направлении по стрелке 2a, 2b, показанной в связи с Фиг.2c. Число плоскостей изображений и интервал между ними задаются пользователем и типом матричного преобразователя в датчике 10. Например, может быть несколько десятков или множество плоскостей изображений. Если пучки расположены по вертикали с узким интервалом, то могут быть сформированы плоскости изображений, расположенные с узким интервалом, и число плоскостей в заданном объеме может быть большим. Пучки, расположенные с более широким интервалом, будут формировать плоскости изображений, расположенные с более широким интервалом, вдоль того же измерения. Толщина плоскостей изображений, расположенных по вертикали, может быть небольшой при сильно сфокусированных пучках, и плоскости изображений могут быть немного разнесены между собой или соприкасаться. Плоскости изображения могут также частично совпадать по толщине, как показано на увеличенном виде слева на Фиг.2a. В данном примере каждая плоскость изображения наполовину совпадает со смежными с ней плоскостями изображений с каждой стороны, как показано скобками, указывающими толщину плоскостей a), b) и c) изображений. Плоскости изображений, которые частично совпадают по толщине, могут быть сформированы частично совпадающими «толстослойными» изображениями, которые описаны в патентной публикации США 2010/0168580 (Thiele).
На Фиг.2b изображена еще одна последовательность плоскостей a)-n) изображений, которые сканируются датчиком 10. В приведенном примере непересекающиеся плоскости расположены не строго параллельно, а под небольшим углом, с небольшой расходимостью между собой по мере увеличения глубины. Данное сканирование можно выполнить посредством направления излучаемых пучков под небольшими углами отклонения от ортогонального (нормального) направления, как показано на приведенном виде плоскостей изображений «с торца». Данные плоскости изображений будут охватывать более широкое поле обзора с увеличением глубины, в сравнении с параллельными по вертикали плоскостями, показанными на Фиг.2a, однако интервалы между центрами плоскостей будут увеличиваться с увеличением глубины. Когда в данном методе используют толстослойные изображения, плоскости могут быть сформированы со значительным частичным совпадением в ближнем поле, но с уменьшением частичного совпадения по вертикали по мере увеличения глубины.
В одном варианте осуществления настоящего изобретения последовательность смежных изображений либо в параллельных плоскостях, либо в плоскостях изображений, расположенных под углом, может быть сформирована любым из двух способов. Один способ состоит в направлении сканирующих пучков в требуемые плоскости изображений, затем в формировании каждого изображения из эхо-сигналов, принимаемых от пучков, сканирующих данную плоскость. Другой способ состоит в сборе 3-мерного набора данных эхо-сигналов из точек в сканируемом объеме, затем в использовании устройства 34 мультипланарного переформатирования для адресации и формирования изображения из данных эхо-сигналов, которые локализованы в каждой требуемой плоскости. Приведенный метод адресации может формировать изображение плоскости с любой ориентацией из 3-мерного набора посредством адресации и использования только таких информационных точек, которые локализованы в требуемой плоскости.
В соответствии с принципами настоящего изобретения смежные плоскости изображений объемной области, сформированной устройством 34 мультипланарного переформатирования, отображаются в последовательности порядка их пространственного расположения, как показано на ультразвуковых изображениях на Фиг.3. Как видно из данного примера, смежные плоскости изображений представляются одновременно. Каждая плоскость изображения сканируется повторно в быстрой последовательности так, что каждое изображение на дисплее является динамическим изображением реального времени его плоскости изображения. Когда датчик 10 прижимают к телу так, чтобы целевой объект инвазивной процедуры находился в поле обзора датчика, то можно наблюдать последовательность динамических изображений, чтобы направлять иглу по мере того, как она приближается к целевому месту и достигает его, и при этом не требуется обеспечивать совмещение иглы с одной плоскостью изображения. Ход введения иглы можно прослеживать по мере того, как игла пересекает последовательные плоскости изображений на дисплее. В примере на Фиг.3, двенадцать изображений смежных плоскостей a)-n) изображений представляют ультразвуковые изображения позвоночника. Целью процедуры является инъекция анестетика через иглу 70 в нервный пучок 62, и для этого необходимо направить введение иглы сквозь ткань тела и хрящ 60, чтобы подойти к нервному пучку 62. Последовательность сходных изображений можно наблюдать в случае процедуры биопсии молочной железы, при которой наполненная жидкостью киста 60, окруженная тканью молочной железы, содержит твердое опухолевидное образование 62 в своей центральной части, которое требуется взять на биопсию. Траектория иглы, когда игла приближается к нервному пучку 62, не совмещена с одной плоскостью изображения последовательности. Наоборот, игла 70 сначала проходит через плоскость h) изображения, когда входит в тело, затем угол траектории введения иглы пересекает плоскость g) изображения, и наконец игла достигает целевого нервного пучка 62 в плоскости f) изображения. В данном примере будет видно, как игла представляется на изображении h), затем на изображении g) и затем на изображении f), в приведенном порядке. Когда используют частично совпадающие плоскости изображений, как показано в связи с Фиг.2a, то смежные изображения будут содержать некоторую общую информацию об изображении. Таким образом, один и тот же участок иглы может представляться на смежных изображениях. Данная особенность поясняется на Фиг.3, на котором некоторая часть участка 70 иглы из изображения g) наблюдается также на смежном изображении f), и некоторая часть участка иглы из изображения g) наблюдается также на смежном изображении h). Описанное представление общей зрительной информации обеспечит, в результате, возможность наблюдения более длинных участков иглы на изображениях, что улучшает визуализацию иглы. Проявление иглы 70 последовательно в упомянутых смежных плоскостях изображений дает врачу интуитивное ощущение того, как траектория иглы ориентирована относительно датчика, и, следовательно, где игла находится в теле, и как ее следует направлять, чтобы достичь заданного места процедуры.
В ходе типичной процедуры врач будет манипулировать датчиком 10 до тех пор, пока хирургическое поле внутри тела не окажется четко в поле обзора, предпочтительно, в центре последовательности плоскостей изображений, которыми, например, были бы изображения f) и g) на Фиг.3. В альтернативном варианте датчик 10 может сканировать только центральную плоскость изображения во время упомянутого начального просмотра хирургического поля, затем может переключаться на виды нескольких мультипланарно переформатированных (MPR) изображений, когда начинается процедура. Обычно, врач будет манипулировать датчиком в разных ориентациях, пока врач не найдет траекторию, которая представляется подходящей на одном из изображений. В общем, данная траектория будет планируемой траекторией введения иглы, которая совмещена с одним из центральных изображений в последовательности. Обычно, для врача будет предпочтительно отслеживать введение иглы в одном изображении, однако анатомия тела может не способствовать данному подходу. Врач будет наблюдать положение корпуса датчика или маркера на корпусе, которые показывают ориентацию плоскостей изображений относительно положения датчика, и с помощью или без помощи проводника иглы будет начинать введение иглы по требуемой траектории. Когда иглу вводят, игла может встречать более твердые и более мягкие области ткани, что вызывает отклонение иглы от запланированной траектории даже тогда, когда врач уверенно направляет иглу. Упомянутое изменение направления может приводить к выходу иглы из одной плоскости ее изображения в вертикальном направлении и к попаданию в смежную плоскость. При использовании стандартного датчика 2-мерной визуализации необходимо отрегулировать положение датчика таким образом, чтобы вся игла и, в частности, острие иглы снова оказались в плоскости изображения. Возможен также вариант перемещения двумерного матричного датчика 10 в соответствии с настоящим примером для повторного совмещения иглы и ее острия с одной плоскостью изображения. Однако настоящее изобретение исключает упомянутое требование повторного позиционирования датчика. После того, как на коже тела находят оптимальное акустическое окно, датчик можно удерживать в данном положении. Датчик необязательно перемещать из его акустического окна, когда траектория иглы изменяется, так как острие иглы будет представляться в изображении смежной плоскости изображения, как показано на Фиг.3. Таким образом, врач может обеспечивать стационарное положение датчика на теле или даже привлекать ассистента для удерживания датчика в рабочем положении в то время, когда врач обращает свое внимание на последовательном отображении изображений (Фиг.3) и направлении иглы. Таким образом, больше не требуется постоянно затрачивать усилия на манипулирование введением иглы или датчиком, чтобы удерживать иглу в одной плоскости изображения.
Возможность манипуляции датчиком 10 одной рукой во время введения иглы другой рукой позволяет врачу оптимизировать визуализацию иглы в изображениях. Визуализация иглы на ультразвуковых изображениях может быть неудовлетворительной, если угол падения ультразвуковых пучков и иглы не оптимален. Если иглу вводят под малым углом, так что игла почти параллельна поверхности кожи и плоскости преобразователя, то игла, фактически, будет зеркальным отражателем, обеспечивающим сильные эхо-сигналы при отражении почти ортогонально излучаемых пучков. Однако когда иглу вводят под большим углом, то большой угол падения приведет к тому, что энергия пучков, фактически, будет проходить вдоль иглы и в сторону от датчика; и к матрице преобразователей отражается очень мало энергии. Следовательно, четкая визуализация иглы на изображениях может быть сложной задачей. Однако в отсутствие необходимости обеспечивать совмещение траектории иглы и одной плоскости изображения можно переориентировать датчик или можно использовать направленные под углом пучки, как показано на Фиг.2b, для оптимизации угла падения пучков и траектории иглы таким образом, чтобы от иглы обратно к матрице преобразователей отражались более мощные эхо-сигналы и изображение иглы формировалось более четко.
Когда датчик и система формируют большое число смежных мультипланарно переформатированных (MPR) изображений, то вероятно невозможно будет наблюдать все изображения на дисплее одновременно. Врачу может требоваться просмотр изображений в увеличенном масштабе, например, двенадцать примерных изображений на Фиг.3, чтобы иметь возможность лучше видеть изображения. Таким образом, изображения a)-n) на Фиг.3 могут быть изображениями только двенадцати центральных плоскостей изображений, созданных датчиком. В полной последовательности смежных изображений могут присутствовать дополнительные смежные изображения до изображения a) и после изображения n). В данном случае, врач будет настраивать элемент управления дисплеем пользовательского интерфейса 38, чтобы выбрать группу смежных изображений для представления на дисплее. Обычно врач будет прокручивать последовательность вверх или вниз по мере осуществления введения иглы, с поддержкой изображения текущего положения острия иглы, изображения f) в примере на Фиг.3, в середине группы изображений, отображаемой на текущий момент. При этом отображаться на текущий момент всегда будет следующая смежная плоскость изображения, достигаемая острием иглы, либо в центральном ряду, либо на один ряд выше или ниже в последовательности.
Другой формат отображения, который можно применить, состоит в использовании одного ряда или столбца смежных изображений, вместо нескольких рядов изображений, как показано на Фиг.3. Ряд изображений будет участком полной последовательности изображений, и врач будет сдвигать ряд влево или вправо с помощью элемента пользовательского управления, чтобы выводить на дисплей новые плоскости изображений, расположенные с одной стороны или другой стороны от группы, отображаемой в текущий момент. С использованием данного метода отображения врач обычно будет сдвигать отображаемые изображения влево или вправо, чтобы поддерживать изображение, представляющее острие иглы, в центральном изображении ряда. Центральное изображение можно быть показано в увеличенном масштабе, в сравнении с другими изображения в ряду, для улучшения визуализации острия иглы в данном изображении. Использование одного ряда, как правило, потребует большего числа манипуляций элементом пользовательского управления, чтобы сдвигать дисплей влево или вправо, в сравнении с отображением нескольких рядов, показанным на Фиг.3.
Реализация настоящего изобретения часто будет предпочтительной для врачей, которые знакомы с инвазивными процедурами, управляемыми с использованием 2-мерной ультразвуковой визуализации, и не привыкли к применению 3-мерной объемной визуализации для управления хирургическими процедурами, так как процедурой можно управлять с помощью последовательности только 2-мерных изображений, показанных на Фиг.3. Врач использует преимущество 3-мерности, поскольку в 3-мерной объемной области сканируется несколько плоскостей, но для управления процедурой требуется наблюдать не 3-мерные объемные изображения, а только знакомые 2-мерные изображения.
Трехмерное ультразвуковое управление хирургическими инструментами
Предотвращение наклона депилирующих устройств
Система и способ автоматического создания звука, относящегося к световой атмосфере
Светоотражающий столб
Теплопроводный установочный элемент для крепления печатной платы к радиатору
Парогенератор с функцией промывки
Передающая среда для детекторов излучения, расположенная в изометрической плоскости
Осветительное устройство с сид и передающим основанием, включающим люминесцентный материал
Интерактивный способ и интерактивная система
Устройство для взбивания молока и способ его очистки
Устройство для взбивания молока, содержащее средство для предотвращения закупоривания препятствия потоку воздуха остатком молока

