Результат интеллектуальной деятельности: Способ определения местоположения воздушных объектов по сигналам их бортовых ответчиков систем контроля воздушного движения
Вид РИД
Изобретение
Изобретение относится к области радиотехнических систем и может быть использовано, например, в системах радиотехнического контроля и вторичной радиолокации.
Известны разностно-дальномерные способы определения координат источника радиоизлучения (ИРИ) [1, Клименко Н.Н., Клименко С.В. Современное состояние теории и практики радиоинтерферометрии // Зарубежная радиоэлектроника, 1990. N 1. - С. 3-14], [2 - Патент РФ №2204145, МПК: (2006. 01) G01S 3/46. Разностно-дальномерный способ пеленгования источника радиоизлучения, Военный инженерно-космический университет. Сайбель А.Г., опубл. 10.05.2003], [3 - Патент РФ №2204145, МПК: (2006. 01) G01S 3/46. Разностно-дальномерный способ определения координат источника радиоизлучения, ООО НПП «Новые Технологии Телекоммуникаций». Овчаренко Л.А., Панков А.В., Погорелов В.А., Потапов С.Г., Тимофеев С.С., Шуст М.П., опубл. 27.06.2014]. Они заключаются в приеме характерных сигналов ИРИ группой взаимосвязанных измерительных пунктов приема с известными координатами, вычислении задержек времени прихода сигналов для пар измерительных пунктов, нахождении точек пересечения поверхностей положения, на основе которых определяют координаты ИРИ.
Таким образом, известные разностно-дальномерные способы позволяют определить местоположение ВО в пространстве.
Недостатками этих способов является необходимость использования системы связи между измерительными пунктами, при этом все измерения должны производиться одновременно, что требует применения сложной системы единого времени и, следовательно, существенно усложняет реализацию технических средств радиоконтроля.
Известен способ определения координат воздушных объектов (ВО) при пассивной бистатической радиолокации, в котором используются сигналы бортовых ответчиков (БО) систем радиолокационного опознавания (РЛО) Mark XII и вторичной радиолокации (BPЛ) ATCRBS (далее системы РЛО/ВРЛ) и сигналы дискретно-адресной системы вторичной радиолокации (ДАС BPЛ), использующие рабочие частоты систем РЛО/ВРЛ [4, Патент РФ №2504797, МПК: (2006. 01) G01S 5/00. Способ определения координат воздушных объектов при пассивной бистатической радиолокации, Министерство обороны Российской Федерации. Верещагина Г.Н., Жихарев Д.С., Козьев В.О., опубл. 20.01.2014], принятый за прототип, который включает:
- измерение моментов приема сигналов БО с неизвестными координатами;
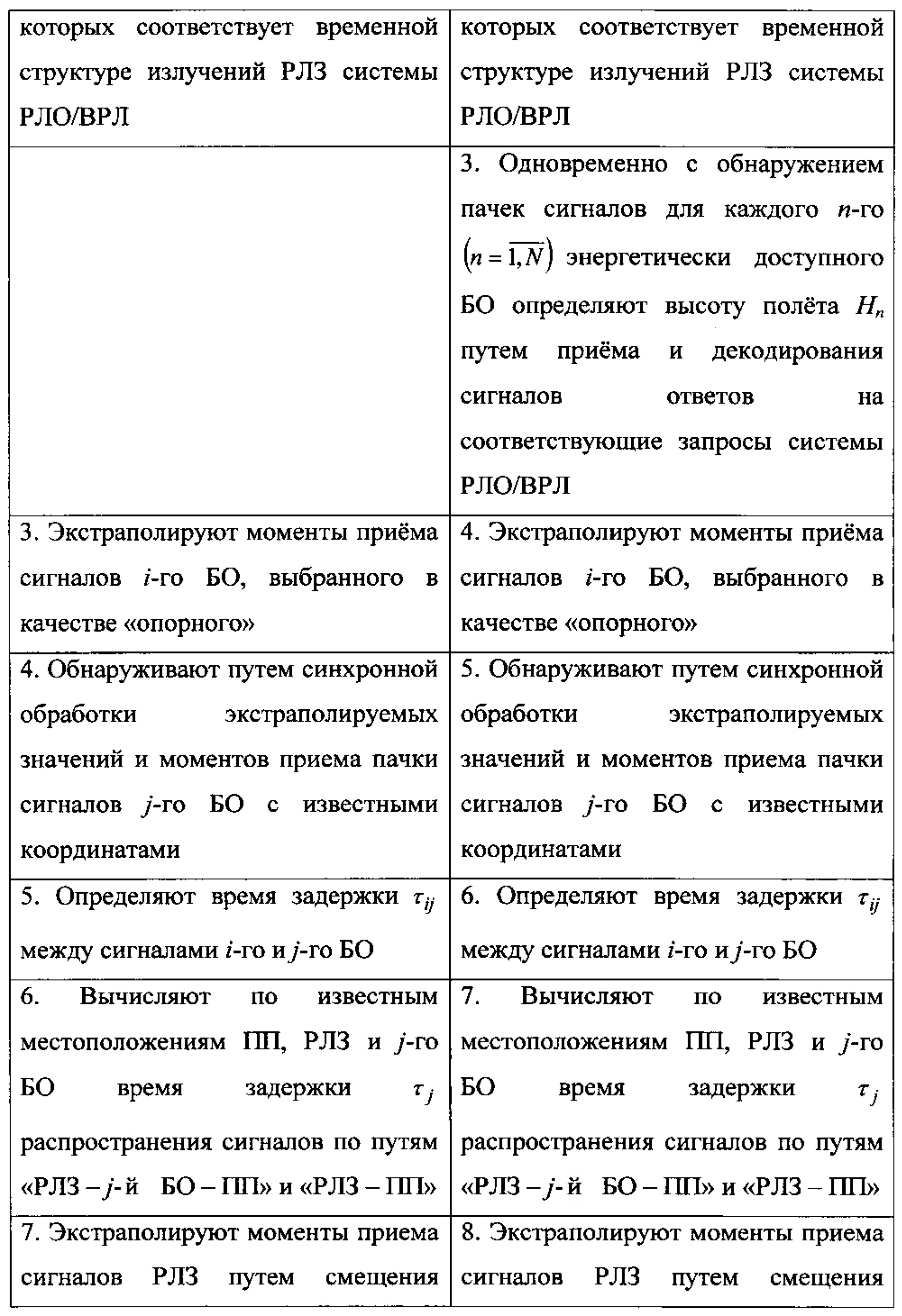
- обнаружение пачек сигналов БО с неизвестными координатами, временная структура излучений которых соответствует временной структуре излучений радиолокационных запросчиков (РЛЗ) систем РЛО/ВРЛ;
- экстраполяцию моментов приема сигналов i-го БО, выбранного в качестве «опорного»;
- обнаружение путем синхронной обработки экстраполируемых значений и моментов приема пачки сигналов j-го БО с известными координатами;
- определение времени задержки τij - между сигналами i-го и j-го БО;
- вычисление по известным местоположениям пункта приема (ПП), РЛЗ и j-го БО время задержки τj распространения сигналов по путям «РЛЗ - j-й БО - ПП» и «РЛЗ - ПП»;
- экстраполяцию моментов приема сигналов РЛЗ путем смещения экстраполированных моментов приема сигналов «опорного» БО на величину (τj-τij)
- через значения параметров эллиптической линии положения
Ln=cτn,
и линии постоянного пеленга с позиции РЛЗ
 ,
,
где с - скорость распространения радиоволн;
τn - время задержки между моментами приема сигналов n-го БО и экстраполированными моментами приема сигналов РЛЗ;
 - время приема центра пачки сигналов n-го БО;
- время приема центра пачки сигналов n-го БО;
 - экстраполированный момент времени приема центра пачки сигналов РЛЗ;
- экстраполированный момент времени приема центра пачки сигналов РЛЗ;
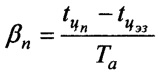
Та - период следования пачек сигналов «опорного» БО,
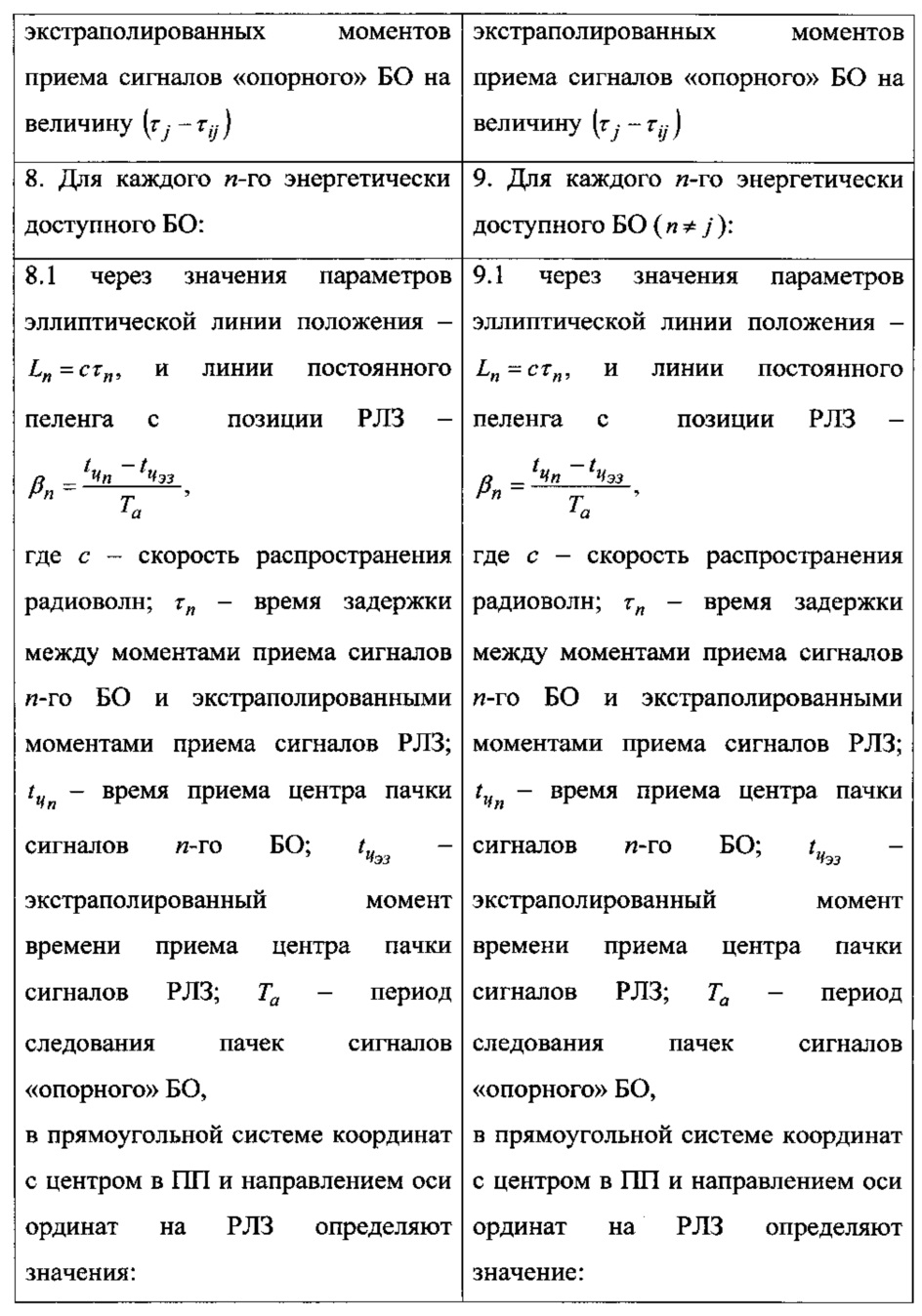
в прямоугольной системе координат с центром в ПП и направлением оси ординат на РЛЗ определение значений: ординат Yn и абсцисс Хn энергетически доступных n-х БО.
Способ обеспечивает простоту технической реализации при определении местоположения ВО на некоторой плоскости XOY.
Недостатком способа-прототипа является неоднозначность определения местоположения ВО в естественном трехмерном пространстве, поскольку положение плоскости XOY в этом пространстве определено неоднозначно: задано только положение оси ординат OY как вектора, определенного точками положения ПП и РЛЗ в естественном трехмерном пространстве.
Задачей изобретения является определение однозначных местоположений ВО по сигналам их БО систем контроля воздушного движения (СКВД) в пространстве при сохранении простоты технической реализации.
Для решения поставленной задачи предлагается способ определения местоположения ВО по сигналам их БО СКВД, для реализации которого измеряют моменты приема сигналов БО с неизвестными координатами, обнаруживают пачки сигналов БО с неизвестными координатами, временная структура излучений которых соответствует временной структуре излучений РЛЗ системы РЛО/ВРЛ, экстраполируют моменты приема сигналов i-го БО, выбранного в качестве «опорного», обнаруживают путем синхронной обработки экстраполируемых значений и моментов приема сигналов БО пачки сигналов j-го БО с известными координатами, определяют время задержки τij между сигналами i-го и j-го БО, вычисляют по известным местоположениям ПП, РЛЗ и j-го БО время задержки τj распространения сигналов по путям «РЛЗ - j-й БО - ПП» и «РЛЗ - ПП», выполняют экстраполяцию моментов приема сигналов РЛЗ путем смещения экстраполированных моментов приема сигналов «опорного» БО на величину (τj-τij), через значения параметров эллиптической линии положения
Ln=cτn,
и линии постоянного пеленга с позиции РЛЗ
,
где с - скорость распространения радиоволн;
τn - время задержки между моментами приема сигналов n-го БО и экстраполированными моментами приема сигналов РЛЗ;
 - время приема центра пачки сигналов n-го БО;
- время приема центра пачки сигналов n-го БО;
 - экстраполированный момент времени приема центра пачки сигналов РЛЗ;
- экстраполированный момент времени приема центра пачки сигналов РЛЗ;
Та - период следования пачек сигналов «опорного» БО,
в прямоугольной системе координат с центром в ПП и направлением оси ординат на РЛЗ определяют значение ординаты Yn.
Согласно изобретению для каждого n-го энергетически доступного БО (n≠j): перед экстраполяцией моментов приема сигналов i-го БО, выбранного в качестве «опорного», одновременно с обнаружением пачек сигналов определяют высоту полета Hn путем приема и декодирования сигналов ответов на соответствующие запросы системы РЛО/ВРЛ, а после определения значения ординат Yn в прямоугольной системе координат с центром в ПП и направлением оси ординат на РЛЗ определяют  - задержку времени приема пачек сигналов j-го и n-го БО, определяют оценку азимута ϕn БО в точке положения РЛЗ по задержке
- задержку времени приема пачек сигналов j-го и n-го БО, определяют оценку азимута ϕn БО в точке положения РЛЗ по задержке  , формируют нормальную вспомогательную плоскость, определяемую вектором ПП - РЛЗ и точкой в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn, формируют азимутальную вспомогательную плоскость, определяемую азимутом n-го БО - ϕn в точке положения РЛЗ и перпендикулярную к плоскости местного горизонта в этой точке, находят прямую линию положения на основе пересечения нормальной и азимутальной вспомогательных плоскостей, вычисляют пространственные координаты БО как точку пересечения найденной прямой линии положения и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn.
, формируют нормальную вспомогательную плоскость, определяемую вектором ПП - РЛЗ и точкой в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn, формируют азимутальную вспомогательную плоскость, определяемую азимутом n-го БО - ϕn в точке положения РЛЗ и перпендикулярную к плоскости местного горизонта в этой точке, находят прямую линию положения на основе пересечения нормальной и азимутальной вспомогательных плоскостей, вычисляют пространственные координаты БО как точку пересечения найденной прямой линии положения и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn.
Техническим результатом является повышение качества обработки сигналов БО СКВД.
Технический результат достигают за счет введения новых операций, выполняемых для каждого n-го  энергетически доступного БО: одновременно с обнаружением пачек сигналов определения высоты полета Hn путем приема и декодирования сигналов ответов на соответствующие запросы системы РЛО/ВРЛ, определения
энергетически доступного БО: одновременно с обнаружением пачек сигналов определения высоты полета Hn путем приема и декодирования сигналов ответов на соответствующие запросы системы РЛО/ВРЛ, определения  - задержки времени приема пачек сигналов j-го и n-го БО, определения оценки азимута ϕn БО в точке положения РЛЗ по задержке
- задержки времени приема пачек сигналов j-го и n-го БО, определения оценки азимута ϕn БО в точке положения РЛЗ по задержке  , формирования нормальной вспомогательной плоскости, определяемой вектором ПП - РЛЗ и точкой в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn, формирования азимутальной вспомогательной плоскости, определяемой азимутом n-го БО - ϕn в точке положения РЛЗ и перпендикулярной к плоскости местного горизонта в этой точке, нахождения прямой линии положения на основе пересечения нормальной и азимутальной вспомогательных плоскостей, вычисления пространственных координат БО как точку пересечения найденной прямой линии положения и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn.
, формирования нормальной вспомогательной плоскости, определяемой вектором ПП - РЛЗ и точкой в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn, формирования азимутальной вспомогательной плоскости, определяемой азимутом n-го БО - ϕn в точке положения РЛЗ и перпендикулярной к плоскости местного горизонта в этой точке, нахождения прямой линии положения на основе пересечения нормальной и азимутальной вспомогательных плоскостей, вычисления пространственных координат БО как точку пересечения найденной прямой линии положения и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn.
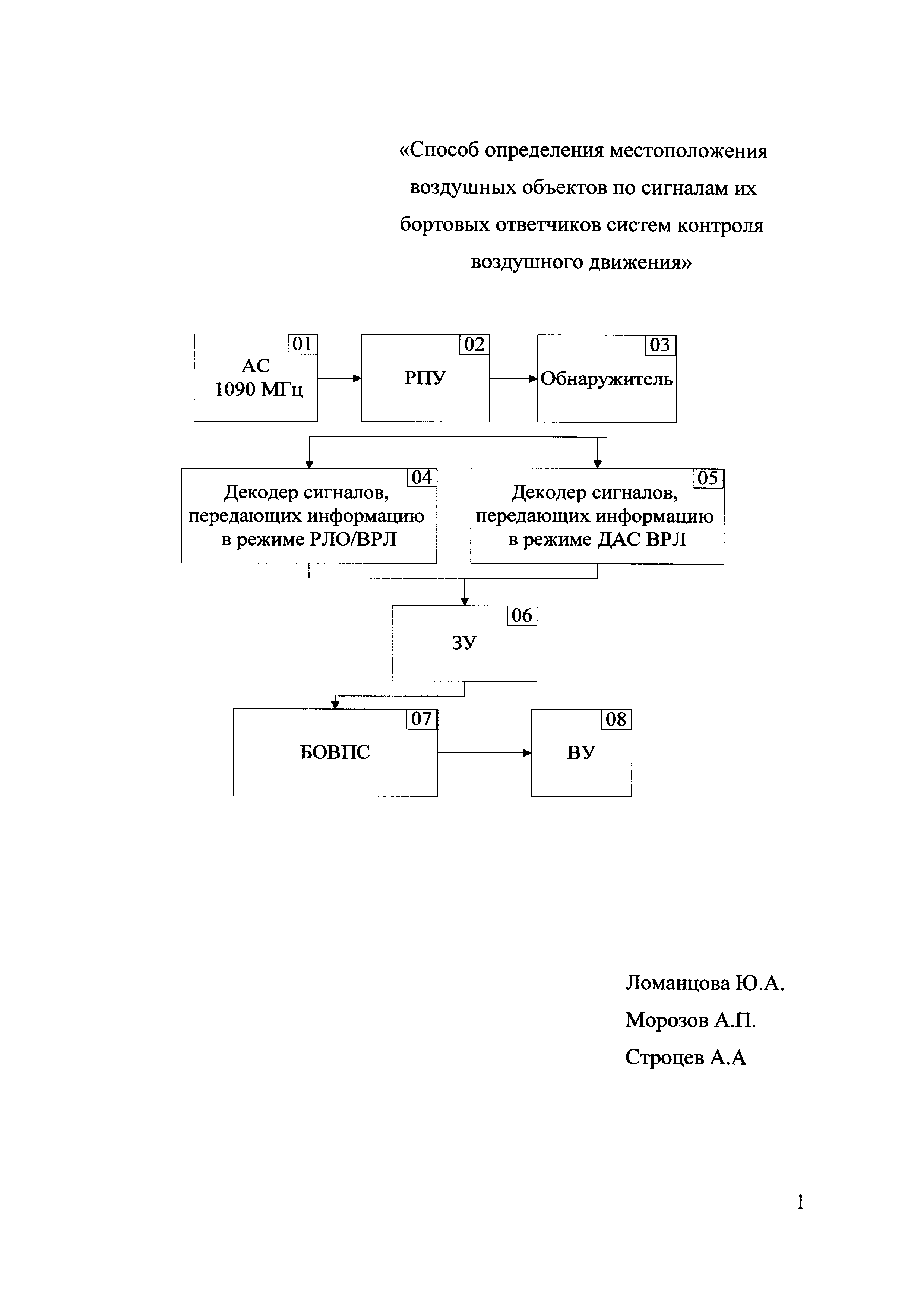
На чертеже приведена структурная схема устройства, реализующего предлагаемый способ определения местоположения ВО по сигналам их БО СКВД.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
При описании способа используются следующие системы координат и их обозначения: пространственная эллипсоидальная геодезическая система координат (ПЭГСК), пространственная прямоугольная геодезическая система координат (ППГСК), пространственная топоцентрическая горизонтная геодезическая система координат (ПТГГСК).
Взаимное расположение систем координат описано в [5, Машимов М.М. Теоретическая геодезия. - М.: Недра, 1991. - 268 с., с. 6].
Способ определения местоположения ВО по сигналам их БО СКВД реализуется следующим образом:
1. Измеряют моменты приема сигналов БО с неизвестными координатами;
2. Обнаруживают пачки сигналов БО с неизвестными координатами, временная структура излучений которых соответствует временной структуре излучений РЛЗ системы РЛО/ВРЛ;
3. Одновременно с обнаружением пачек сигналов для каждого n-го энергетически доступного БО определяют высоту полета Hn путем приема и декодирования сигналов ответов на соответствующие запросы системы РЛО/ВРЛ;
4. Экстраполируют моменты приема сигналов i-го БО, выбранного в качестве «опорного»;
5. Обнаруживают путем синхронной обработки экстраполируемых значений и моментов приема пачки сигналов j-го БО с известными координатами;
6. Определяют время задержки τij между сигналами i-го и j-го БО;
7. Вычисляют по известным местоположениям ПП, РЛЗ и j-го БО время задержки τj распространения сигналов по путям «РЛЗ - j-й БО - ПП» и «РЛЗ - ПП»;
8. Экстраполируют моменты приема сигналов РЛЗ путем смещения экстраполированных моментов приема сигналов «опорного» БО на величину (τj-τij);
9. Для каждого n-го энергетически доступного БО (n≠j):
9.1. через значения параметров эллиптической линии положения
Ln=сτn,
и линии постоянного пеленга с позиции РЛЗ
,
где с - скорость распространения радиоволн;
τn - время задержки между моментами приема сигналов n-го БО и экстраполированными моментами приема сигналов РЛЗ;
 - время приема центра пачки сигналов n-го БО;
- время приема центра пачки сигналов n-го БО;
 - экстраполированный момент времени приема центра пачки сигналов РЛЗ;
- экстраполированный момент времени приема центра пачки сигналов РЛЗ;
Та - период следования пачек сигналов «опорного» БО,
в прямоугольной системе координат с центром в ПП и направлением оси ординат на РЛЗ определяют значение:
9.1.1. ординат Yn;
9.2. определяют  - задержку времени приема пачек сигналов j-го и n-го БО;
- задержку времени приема пачек сигналов j-го и n-го БО;
9.3. определяют оценку азимута ϕn БО в точке положения РЛЗ по задержке  ;
;
9.4. формируют нормальную вспомогательную плоскость, определяемую вектором ПП - РЛЗ и точкой в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn;
9.5. формируют азимутальную вспомогательную плоскость, определяемую азимутом n-го БО - ϕn в точке положения РЛЗ и перпендикулярную к плоскости местного горизонта в этой точке;
9.6. находят прямую линию положения на основе пересечения нормальной и азимутальной вспомогательных плоскостей;
9.7. вычисляют пространственные координаты БО как точку пересечения найденной прямой линии положения и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn.
Для реализации п. 9.4 формируют нормальную вспомогательную плоскость, определяемую вектором ПП - РЛЗ и точкой в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn.
Пусть исходными данными являются: ξПП=(ХППYППZПП)Т - координаты пункта приема в ППГСК, ξРЛЗ=(XРЛЗYРЛЗZРЛЗ)Т - координаты РЛЗ в ППГСК, Yn - координата точки, расположенной на оси ПП - РЛЗ, Т - знак транспонирования. Тогда определение коэффициентов нормальной вспомогательной плоскости можно представить в следующей последовательности действий:
1. Определение координат точки в пространстве, расположенной на оси ПП - РЛЗ с координатой Yn
 ,
,
где ξВсПл=(ξВсПл1 ξВсПл2 ξВсПл3)Т - координаты определенной точки в пространстве.
2. Определение вектора ПП - РЛЗ нормальной вспомогательной плоскости
nВсПл=ξРЛЗ-ξПП,
где nВсПл=(nВсПл1 nВсПл2 nВсПл3)Т - вектор ПП - РЛЗ нормальной вспомогательной плоскости.
3. Определение коэффициентов уравнения нормальной вспомогательной плоскости
А1х+В1y+C1z+Dl=0,
где А1=nВсПл1;
B1=nВсПл2;
C1=nВсПл3;
D1=-(nВсПл1⋅ξВсПл1+nВсПл2⋅ξВсПл2+nВсПл3⋅ξВсПл3).
Для реализации п. 9.5 формируют азимутальную вспомогательную плоскость, определяемую азимутом n-го БО - ϕn в точкеположения РЛЗ и перпендикулярную к плоскости местного горизонта в этой точке.
Пусть исходными данными являются: ζРЛЗ=(ВРЛЗ LРЛЗ НРЛЗ)Т - координаты РЛЗ в ПЭГСК,  - время приема центра пачки сигналов j-го БО,
- время приема центра пачки сигналов j-го БО, - время приема центра пачки сигналов n-го БО, Та - период вращения «опорного» РЛЗ. Тогда определение коэффициентов азимутальной вспомогательной плоскости можно представить в следующей последовательности действий:
- время приема центра пачки сигналов n-го БО, Та - период вращения «опорного» РЛЗ. Тогда определение коэффициентов азимутальной вспомогательной плоскости можно представить в следующей последовательности действий:
1. Определение задержки времени приема пачек сигналов j-го и n-го БО
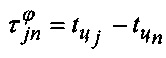 ,
,
где  - время приема центра пачки сигналов j-го БО;
- время приема центра пачки сигналов j-го БО;
 - время приема центра пачки сигналов n-го БО.
- время приема центра пачки сигналов n-го БО.
2. Определение оценки азимута БО в точке положения РЛЗ по задержке 
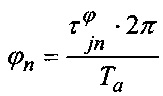 ,
,
где ϕn - азимут n-го БО в точке положения РЛЗ;
 - задержка времени приема ответов между j-м и n-м БО в ПП;
- задержка времени приема ответов между j-м и n-м БО в ПП;
Та - период вращения «опорного» РЛЗ.
3. Определение трех точек в ПТГГСК с центром в РЛЗ для построения азимутальной вспомогательной плоскости
(x0,y0,z0)=(0,0,0);
(x1,y1,z1)=(0,0,R10);
(х2,y2,z2)=(R20⋅cos(ϕотв), R20⋅sin((ϕотв),0),
где R10, R20 - любые числа;
ϕn - азимут n-го БО в точке положения РЛЗ.
4. Определение уравнения азимутальной вспомогательной плоскости по трем точкам в ПТГГСК с центром в РЛЗ
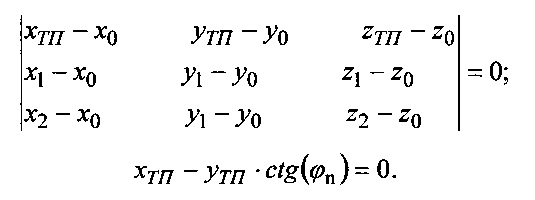
5. Перевод полученного уравнения из ПТГГСК в ППГСК по формулам [5, с. 14]
xТП=(Z+e2⋅N0⋅sin(BРЛЗ))⋅cos(BРЛЗ)-(X⋅cos(LРЛЗ)+Y⋅sin(LРЛЗ))⋅sin(BРЛЗ);
yТП=Y⋅cos(LРЛЗ)-X⋅sin(LРЛЗ);
zТП=(Z+e2⋅N0⋅sin(BРЛЗ))⋅sin(BРЛЗ)+(X⋅cos(LРЛЗ)+Y⋅sin(LРЛЗ))⋅cos(BРЛЗ)-(N0+HРЛЗ);

где 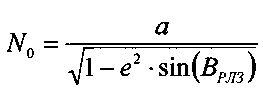 - радиус кривизны первого вертикала [5, с. 13];
- радиус кривизны первого вертикала [5, с. 13];
а - большая полуось земного эллипсоида;
е2 - квадрат первого эксцентриситета меридианного эллипса;
(X,Y,Z) - координаты в ППГСК;
(xТП,yТП,zТП) - координаты в ПТГГСК.
6. Определение коэффициентов уравнения азимутальной вспомогательной плоскости:
А2х+В2у+C2z+D2=0,
где А2=sin(LРЛЗ)⋅ctg(ϕn)-cos(LРЛЗ)⋅sin(BPJIЗ);
B2=-cos(LPJIЗ)⋅ctg(ϕn)+sin(LPJIЗ)⋅sin(BРЛЗ);
C2=-cos(BPJIЗ);
D2=-e2⋅N0⋅sin(BPJIЗ)⋅cos(BPJIЗ);
(X,Y,Z) - координаты в ППГСК;
ϕn - азимут n-го БО в точке положения РЛЗ;
(ВРЛЗ,LРЛЗ,НРЛЗ) - координаты РЛЗ в ПЭГСК.
Для реализации п. 9.6 решают систему уравнений, определяющую прямую линию положения на основе пересечения нормальной и азимутальной вспомогательных плоскостей в пространстве

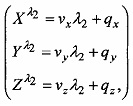
Прямую линию положений в пространстве также можно представить параметрически [6, Бугров Я.С. Высшая математика: Учеб. Для вузов: В 3 т., Т. 1: Элементы линейной алгебры и аналитической геометрии - М.: Дрофа, 2004. - 288 с., с. 90]

где v=(vхvyvz)T - направляющий вектор прямой;
q(qx,qy,qz) - произвольная точка, принадлежащая прямой;
λ - параметр.
В случае, когда прямая является пересечением двух плоскостей,
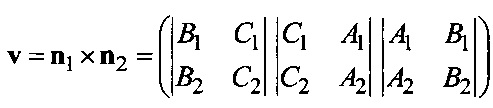 ,
,
где n1 и n2 - нормали к пересекающимся плоскостям;
х - операция векторного произведения.
Тогда, положив qz=0 в силу произвольности точки q, из (1) получают
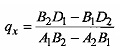 ;
;
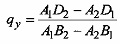 .
.
Для реализации п. 9.7 решают систему уравнений, определяющую пространственные координаты БО как точку пересечения найденной прямой линии положения и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn, которая имеет следующий вид:
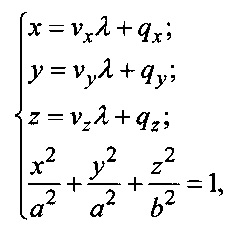
где
а=аэл+Hn;
b=bэл+Hn,
а эл bэл - полуоси эллипсоида в заданной геоцентрической экваториальной системе координат,
Hn - высота полета БО.
Данная система уравнений сводится к одному уравнению относительно параметра λ
аλ2+bλ+с=0,
где  ;
;
b=2b2(vxqx+vyqy)+2a2vzqz;
 .
.
Полученное уравнение является квадратным уравнением относительно параметра λ. Его корни находятся по следующей формуле:
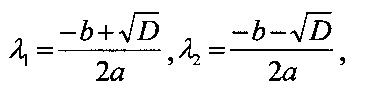
где D=b2-4ас.
По выражениям (2), получаем координаты
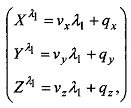 ;
;  ;
;
двух точек 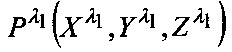 и
и 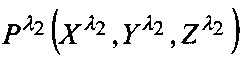 .
.
Местоположением n-го БО является точка Pn БО с координатами

Координаты (Xn БО Yn БО Zn БО)Т ППГСК переводят в координаты (Вn БО, Ln БО, Нn БО) ПЭГСК.
Таким образом, предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1. 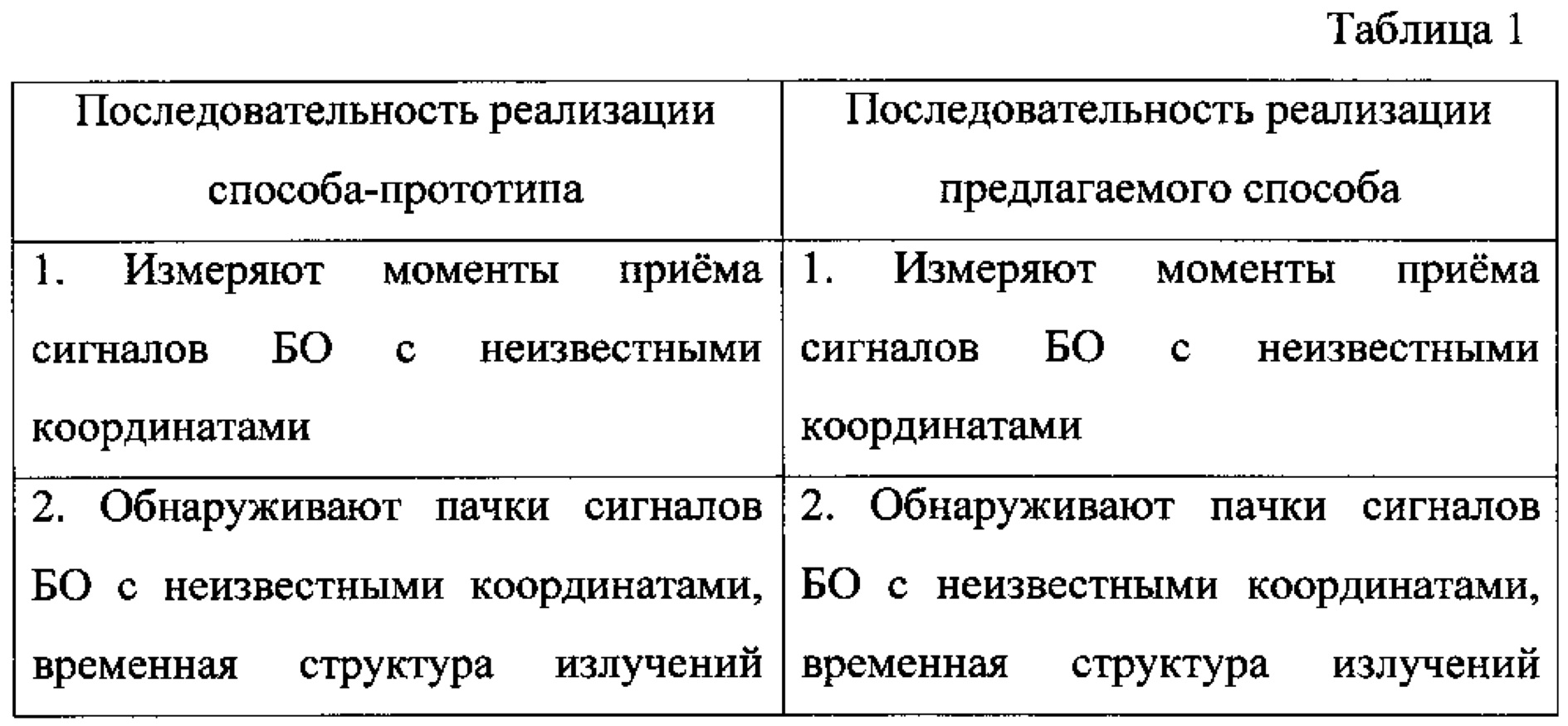
Из представленной таблицы сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе относительно способа-прототипа дополнительно для каждого n-го  энергетически доступного БО определяют высоту полета Hn путем приема и декодирования сигналов ответов на соответствующие запросы системы РЛО/ВРЛ, задержку времени приема пачек сигналов j-го и n-го БО
энергетически доступного БО определяют высоту полета Hn путем приема и декодирования сигналов ответов на соответствующие запросы системы РЛО/ВРЛ, задержку времени приема пачек сигналов j-го и n-го БО  , оценку азимута ϕn БО в точке положения РЛЗ по задержке
, оценку азимута ϕn БО в точке положения РЛЗ по задержке  , местоположение каждого n-го БО как точку пересечения нормальной и азимутальной вспомогательных плоскостей и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn, что приводит к положительному эффекту - определению однозначных местоположений ВО по сигналам их БО СКВД в пространстве при сохранении простоты технической реализации.
, местоположение каждого n-го БО как точку пересечения нормальной и азимутальной вспомогательных плоскостей и поверхности положения, заданной земным эллипсоидом с полуосями, увеличенными на значение высоты полета БО - Hn, что приводит к положительному эффекту - определению однозначных местоположений ВО по сигналам их БО СКВД в пространстве при сохранении простоты технической реализации.
Структурная схема устройства, реализующего предлагаемый способ, изображена на чертеже. В состав устройства входят: антенная система (АС 1090 МГц) 01, радиоприемное устройство (РПУ) 02, обнаружитель 03, декодер сигналов, передающих информацию в режиме РЛО/ВРЛ, 04, декодер сигналов, передающих информацию в режиме ДАС BPЛ, 05, запоминающее устройство (ЗУ) 06, блок обработки времени принятых сигналов (БОВПС) 07, вычислительное устройство (ВУ) 08.
АС 1090 МГц 01 соединена с РПУ 02, выход которого подключен к входу обнаружителя 03. Обнаружитель 03 соединен с декодером сигналов, передающих информацию в режиме РЛО/ВРЛ, 04, и декодером сигналов, передающих информацию в режиме ДАС BPЛ, 05. Выходы декодеров подключены к входу ЗУ 06, выход которого соединен с входом БОВПС 07. БОВПС 07 соединен с ВУ 08.
Сигналы БО поступают на АС 1090 МГц 01, затем в РПУ 02. В РПУ 02 выполняется аналого-цифровое преобразование с выделением квадратурных каналов, цифровая фильтрация и получение амплитудных значений. Далее обработанные сигналы передают в обнаружитель 03, в котором выполняется разделение сигналов различных систем ВРЛ. В декодере сигналов, передающих информацию в режиме РЛО/ВРЛ, 04, сигналы преобразуют в значение ответных кодов в режимах опознавания систем РЛО/ВРЛ и в декодере сигналов, передающих информацию в режиме ДАС ВРЛ, 05 - в режимах опознавания ДАС ВРЛ. Результаты декодирования передают в ЗУ 06 с фиксацией времени приема. Из ЗУ 06 передают в БОВПС 07 координаты, режимы работы «опорного» РЛЗ и ПП и данные о БО. В БОВПС 07 вычисляют временные задержки, необходимые для реализации предлагаемого способа определения местоположения ВО. Выходные данные с БОВПС 07 передают на ВУ 08 для дальнейшей обработки и определения местоположения ВО по сигналам их БО СКВД.
Таким образом, предлагаемый способ, также как и способ-прототип, позволяет определить координаты местоположения ВО. Кроме того, приведенная сравнительная оценка эффективности предлагаемого способа относительно способа-прототипа показывает определение однозначного местоположения ВО по сигналам их БО СКВД в пространстве.







Способ обучения искусственной нейронной сети
Способ построения радиолокационной станции
Способ построения антенной системы с изменяемым углом плоскости линейной поляризации
Голографический способ измерения доплеровского сдвига частоты
Способ построения антенной решетки
Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей
Способ обнаружения малых беспилотных летательных аппаратов
Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой
Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой
Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой
Способ обучения искусственной нейронной сети

